一种电控式搅拌车操纵系统
文献发布时间:2023-06-19 09:52:39
技术领域
本发明涉及混凝土搅拌运输车领域,具体是一种电控式搅拌车操纵系统。
背景技术
目前市面上的多数搅拌车的操纵系统多为机械连杆式和软轴拉线式。机械连杆式的操纵系统零件多、结构复杂安装难度大,软轴拉线式的操纵系统由于拉线是一种易损件导致操纵系统的故障率高、使用寿命短。而且机械连杆式和软轴拉线式的操纵系统很难实现自动化和精准的控制。
发明内容
本发明的目的在于解决上述存在的技术缺陷,提供一种结构简单、安装方便、容易实现的一种电控式搅拌车操纵系统,使用电动推杆配合接近开关,从而实现搅拌车操纵系统电控。
本发明解决其技术问题所采用的技术方案是:一种电控式搅拌车操纵系统,包括摆杆总成,所述摆杆总成包括传动杆,传动杆两个端部分别套接在限位装置、端座上;传动杆上连接有用于与电动推杆总成连接驱动传动杆旋转的支板一、用于通过油泵连杆与液压油泵控制摆臂连接的支板二以及感应支板;
所述限位装置包括固定于一侧附梁的第一支撑座、装于第一支撑座上的限位座,限位座包括U型底座、一体成型于底座右侧壁上的限位座本体,U型底座上设有用于套装传动杆的第一套筒,U型底座右侧壁设有用于通过传动杆的通过孔,限位座本体包括一横板、连接于横板两端部的两个折弯板,两个折弯板上分别设有一螺栓安装通孔,两个螺栓安装通孔内分别安装有一顶端抵住支板一防止支板一绕传动杆旋转过度的限位调节螺栓,横板与两个折弯板之间的夹角为90°和液压油泵控制摆臂单边最大转角之和;
所述端座下端还设有感应装置,感应装置包括感应器支座和两个安装在感应器支座上接近开关,两个接近开关安装后与感应支板的距离在5~8mm之间;
还包括可以接收两个接近开关信号,经过处理控制电动推杆总成伸缩的控制器。
所述电动推杆总成包括电动推杆,电动推杆伸出杆顶端通过连接筒与关节轴承一端连接,关节轴承另一端与支板一下端部连接,电动推杆底座铰接于安装座上焊接的连接座上,安装座焊接在靠近限位装置一侧的附梁上;电动推杆与控制器电性连接。
所述连接筒一端设有用于紧固电动推杆伸出杆的螺栓通孔,伸出杆顶端设用于通过螺栓一的通过孔,螺栓一穿过螺栓通孔以及通过孔将连接筒与电动推杆连接固定;连接筒另一端为螺柱,关节轴承把接在连接筒的螺柱上并用螺母紧固。
所述端座包括固定于另一侧附梁的第二支撑座、装于第二支撑座上的封板,封板上设有用于套装传动杆的第二套筒,第二套筒与U型底座右侧壁的通过孔以及第一套筒三者中心轴位于同一直线。
所述第二支撑座为由与附梁焊接的立板一、连接于立板一上的支撑横板一组成的折弯结构,封板为由底板二、立于底板一侧的立板二组成的折弯结构,封板的底板二与第二支撑座的支撑横板一对应位置设多个螺栓安装孔二,多个螺栓二依次穿过底板二、横板对应的螺栓安装孔二将封板固定于第二支撑座上。
所述感应器支座包括支撑底板、竖直连接于支撑底板一端的安装竖板,支撑底板上设有与第二支撑座的支撑横板一上的螺栓安装孔二对应的腰型孔一。
所述支板一、支板二、感应支板通过焊接与传动杆连接,所述支板一与支板二及感应支板分别呈180º,支板二与液压油泵控制摆臂位于同一平面上。
所述感应支板下端感应面为扇形。
所述第一支撑座为由与附梁焊接的立板三、连接于立板三上的支撑横板二组成的折弯结构,U型底座与支撑横板二对应位置设多个螺栓安装孔三,多个螺栓三依次穿过U型底座、支撑横板二对应的螺栓安装孔三将U型底座固定于第一支撑座上。
所述螺栓安装通孔为腰型孔二。
本发明的有益效果是:结构简单、安装方便,使用电动推杆配合接近开关,从而实现搅拌车操纵系统电控,实现液压油泵的自动化和精准的控制。
附图说明
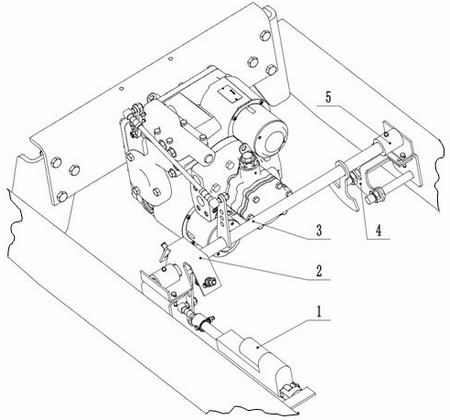
图1为本发明操纵系统电控装置结构示意图;
图2为本发明电动推杆总成结构示意图;
图3为本发明限位装置结构示意图;
图4为本发明摆杆总成结构示意图;
图5为本发明感应装置结构示意图;
图6为本发明端座结构示意图;
图7为本发明停止状态;
图8为本发明反转状态;
图9为本发明正转状态;
图中:1、电动推杆总成,1.1、关节轴承,1.2、连接筒,1.3、电动推杆,1.4、连接座,1.5、安装座,2、限位装置,2.1、第一支撑座,2.2、第一套筒,2.3、限位座,2.4、限位调节螺栓,3、摆杆总成,3.1、支板一,3.2、支板二,3.3、传动杆,3.4、感应支板,4、感应装置,4.1、接近开关,4.2、感应器支座,5、端座,5.1、第二套筒,5.2、封板,5.3、第二支撑座。
具体实施方式
现在结合附图对本发明实施例中的技术方案进行清楚、完整地描述,此附图为简化的示意图,仅以示意方式说明本发明的基本结构。
根据图1所示,本发明包括电动推杆总成1、限位装置2、摆杆总成3、感应装置4、端座5五个部分。在使用时液压油泵的控制摆臂与摆杆总成3通过油泵连杆连接,摆杆总成3两端分别套在限位装置2和端座5上,构成一个转动副,摆杆总成3可以转动。电动推杆总成1与摆杆总成3连接,并通过电控的方式推动摆杆总成3转动,并通过感应装置4感知摆杆总成3转动的位置。摆杆总成3转动时,通过油泵连杆连接带动液压油泵的控制摆臂摆动,以实现对油泵正反转向的控制;还包括可以接收两个接近开关4.1信号,经过处理控制电动推杆总成1伸缩的控制器,电动推杆1.3与控制器电性连接,控制器为三菱FX3U-48MR/ES-A,电动推杆1.3为LEY32S3C-200L-S5A2H,控制器接收两个接近开关4.1信号,经过处理控制电动推杆1.3的伺服电机的动作,控制电动推杆1.3伸缩,进而使液压油泵的控制摆臂摆动。
根据图2所示,电动推杆总成1包括用于与支板一3.1连接的关节轴承1.1,用于转接关节轴承1.1和电动推杆1.3的连接筒1.2,连接筒1.2一端设有用于紧固电动推杆1.3伸出杆的螺栓通孔,伸出杆顶端设用于通过螺栓一的通过孔,连接筒1.2一端套装在电动推杆1.3的推杆上并用螺栓固定,连接筒1.2的另一端为螺柱,关节轴承1.1把接在连接筒1.2的螺柱上并用螺母备紧;电动推杆1.3尾端与连接座1.4通过销轴连接,并构成一个转动副,电动推杆1.3可以以销轴为轴转动,电动推杆1.3在推动支板一3.1向前向后摆的过程中,电动推杆1.3的前端会随着支板一3.1一起有一个高度变化,电动推杆1.3的尾端高度不变,为实现上述动作,需要在电动推杆1.3的尾端增加一个旋转自由度;连接座1.4与安装座1.5以焊接的方式连接,安装座1.5焊接在附梁上对电动推杆总成1起固定和支撑作用。
根据图3所示,限位装置2包括固定于一侧附梁的第一支撑座2.1、装于第一支撑座2.1上的限位座2.3,限位座2.3包括U型底座、一体成型于底座右侧壁上的限位座本体,U型底座上设有用于套装传动杆3.3的第一套筒2.2,U型底座右侧壁设有用于通过传动杆3.3的通过孔,限位座本体包括一横板、连接于横板两端部的两个折弯板,两个折弯板上分别设有一螺栓安装通孔,两个螺栓安装通孔内分别安装有一顶端抵住支板一3.1防止支板一3.1绕传动杆3.3旋转过度的限位调节螺栓2.4,横板与两个折弯板之间的夹角为90°和液压油泵控制摆臂单边最大转角之和,防止摆动角度过大,可以有效的对液压油泵的控制摆臂进行保护,减小液压油泵的故障率,降低搅拌车的维修成本;第一支撑座2.1为由与附梁焊接的立板三、连接于立板三上的支撑横板二组成的折弯结构,U型底座与支撑横板二对应位置设多个螺栓安装孔三,多个螺栓三依次穿过U型底座、支撑横板二对应的螺栓安装孔三将U型底座固定于第一支撑座2.1上;螺栓安装通孔为腰型孔二,限位调节螺栓2.4可以在上述腰型孔二内左右调节,让限位调节螺栓对准支板一3.1,确保摆杆总成3在摆到最大位置时限位调节螺栓2.4可以对摆杆总成3上支板一3.1起阻挡的作用。
根据图4所示,摆杆总成3包括支板一3.1、支板二3.2、感应支板3.4,所述支板一3.1、支板二3.2、感应支板3.4通过焊接与传动杆3.3连接,焊接时保证所述支板一3.1与支板二3.2、感应支板3.4呈180º,支板二3.2与液压油泵控制摆臂位于同一平面上。感应支板3.4下端感应面为扇形。
根据图5所示,感应装置4包括感应器支座4.2和两个安装在感应器支座4.2上接近开关4.1,接近开关4.1为带外螺纹的圆柱体,通过两个螺母固定在感应器支座4.2上,接近开关4.1安装时要求与感应支板3.4的距离不能过大通常在5~8mm之间,感应器支座4.2包括支撑底板、竖直连接于支撑底板一端的安装竖板,支撑底板上设有与第二支撑座5.3的支撑横板一上的螺栓安装孔二对应的腰型孔一,腰型孔一的设计方便调节接近开关4.1与感应支板3.4的距离。
根据图6所示,端座5包括固定于另一侧附梁的第二支撑座5.3、装于第二支撑座5.3上的封板5.2,封板上设有用于套装传动杆3.3的第二套筒5.1,第二套筒5.1与U型底座右侧壁的通过孔以及第一套筒2.2三者中心轴位于同一直线;第二支撑座5.3为由与附梁焊接的立板一、连接于立板一上的支撑横板一组成的折弯结构,封板5.2为由底板二、立于底板一侧的立板二组成的折弯结构,封板5.2的底板二与第二支撑座5.3的支撑横板一对应位置设多个螺栓安装孔二,多个螺栓二依次穿过底板二、横板对应的螺栓安装孔二将封板5.2固定于第二支撑座5.3上。
本发明的操作过程:
根据图7、8、9所示,在使用时液压油泵的控制摆臂与摆杆总成3的支板二3.2通过油泵连杆连接,摆杆总成3的传动杆3.3两端分别套在限位装置2的第一套筒2.2和端座5上的第二套筒5.1内,构成一个转动副,传动杆3.3可以在第一套筒2.2和第二套筒5.1内转动。摆杆总成3上的支板一3.1在电动推杆总成1上的电动推杆1.3的推动下,摆杆总成3转动,摆杆总成3通过油泵连杆连接带动液压油泵的控制摆臂摆动,以实现油泵对搅拌筒正、反转的控制。摆杆总成3转动位置可以通过感应装置4 上的两个接近开关4.1与感应支板3.4的感应情况来判断,从而得到油泵此刻处于正转、停止、反转状态情况。图7的状态为停止状态,此时感应支板3.4同时将两个接近开关4.1覆盖,两个接近开关4.1都有信号;图8的状态为搅拌筒反转状态,此时感应支板3.4只是将靠近油泵那一个接近开关4.1覆盖,此时靠近油泵那一个接近开关有信号;图9的状态为搅拌筒正转状态,此时感应支板3.4只是将远离油泵那一个接近开关4.1覆盖,此时远离油泵那一个接近开关有信号。通过对两个接近开关4.1得到信号情况,控制器就可以准确得到搅拌筒此刻处于正转、停止、反转状态情况。
本发明结构简单、安装方便、容易实现的一种电控式搅拌车操纵系统,使用电动推杆配合接近开关,从而实现搅拌车操纵系统电控,实现液压油泵的自动化和精准的控制。
- 一种电控式搅拌车操纵系统
- 一种搅拌车发动机ECU智能电控操纵系统及控制方法