无线阀组
文献发布时间:2023-06-19 10:36:57
技术领域
本发明涉及一种构成为能够移动的无线阀组。
背景技术
机器人系统例如具备把持工件的末端执行器,在末端执行器设置工件的处置机构。例如,在日本特开平7-19793号公报中,对工件进行高压清洗的喷嘴(喷枪)设置于末端执行器。喷枪基于阀(电磁阀)的开闭来进行高压清洗。
另外,虽然在日本特开平7-19793号公报中没有公开,但在使多个电磁阀所对应的多个机构动作而进行处置(工件的输送等)的机器人系统中,使多个电磁阀动作的阀组设置在末端执行器。例如,阀组基于对各电磁阀的通电/非通电来对压力流体的供给/排出等进行切换,从而进行机构部的动作(工件的把持等)。
然而,为了向末端执行器的阀组持续地供给电力,这种机器人系统以沿着机械臂的方式设置线束。但是,由于这样设置线束,机器人的可动区域被限制,另外,产生线束缠绕于构成机器人的部件等的不良情况。由于具有大量阀的阀组的耗电量也变大,因此在假设将电池搭载于末端执行器的情况下,电池大型化,并且重量増加。
发明内容
本发明是鉴于上述情况而完成的,其目的在于,提供一种能够通过向无线阀组进行无线电力传输从而实现可动部的稳定的移动和无线阀组的持续的动作的无线阀组。
为了达到上述的目的,本发明的一个方式是一种无线阀组,构成为具备多个电磁阀并能够进行无线通信,该无线阀组是通过可动部移动的结构,且具备:电池,该电池能够存储电力并向所述多个电磁阀供给所述电力;以及受电部,该受电部与所述电池连接,并通过无线电力传输从所述无线阀组的供电站对该电池进行充电。
根据本发明,无线阀组通过具备电池和受电部,由此能够在无线阀组的暂时停止时等适当的时刻,通过无线电力传输对电池进行充电。由此,可动部没有通过该可动部而向无线阀组供给电力的线束,另外能够抑制电池的充电容量,减少重量、尺寸。其结果是,能够实现可动部的稳定的移动和无线阀组的持续的动作。尤其是,在工厂内粉尘、油雾等飞散的环境下使用无线阀组的机会较多,通过适用电池和受电控制部,能够减少内部结构的露出部分,从而大幅地提高防尘和防水性能。另外,电池在性能劣化时能够更换。
附图说明
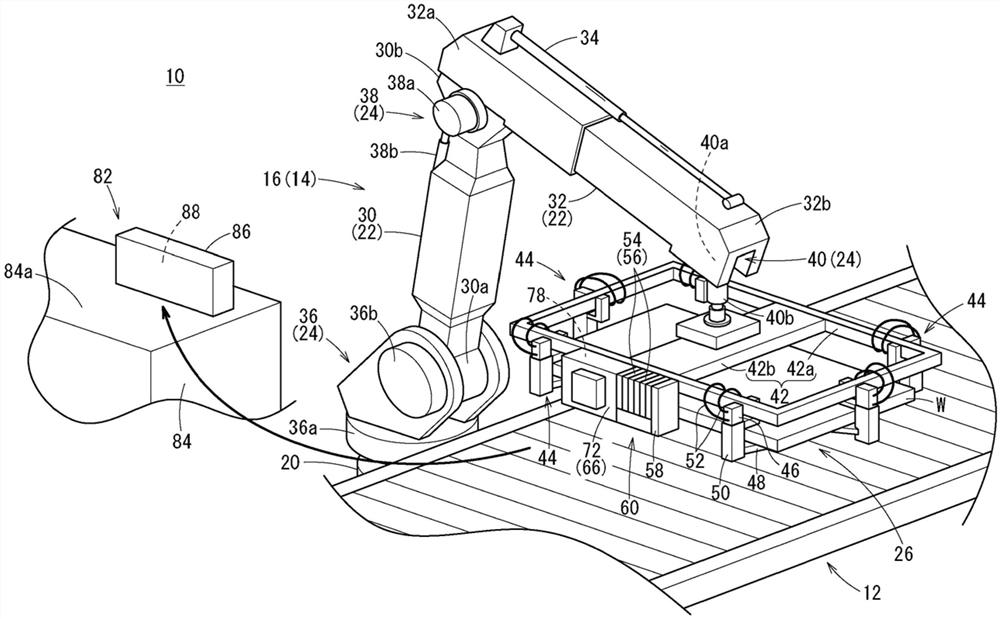
图1是表示本发明的一个实施方式的机器人系统的说明图。
图2是表示机器人系统的无线电力传输的说明图。
图3A是第一变形例的机器人系统的说明图。图3B是第二变形例的机器人系统的说明图。
具体实施方式
以下,列举优选的实施方式,参照附图对本发明进行详细说明。
如图1所示,本发明的一个实施方式的机器人系统10例如设置在工厂内,设置在输送工件W的输送带12的附近的位置。该机器人系统10把持并移动工件W,将工件W载置在输送带12,或者将输送带12的工件W取出并移动到别的位置。另外,机器人系统10构成为能够移动,不限定于进行工件W的输送,能够应用于进行工件W的处置(移送、加工、安装、检查、分选、捆包等)的各种结构。
机器人系统10具有使工件W移动的、相当于本发明的可动部14的多关节机器人16(以下,也仅称为机器人16)和控制机器人16的动作的控制部18(参照图2)。机器人16具有固定用的基台20、搭载于基台20的多个臂22、能够变化角度地将基台20或一个臂22与其他的臂22连结的多个关节部24以及直接把持工件W的末端执行器26。另外,机器人16也可以构成为其整体能够移动。
具体而言,多个臂22具有第一臂30和第二臂32,该第一臂30具有规定长度,并且一端部30a与基台20的上部连接,该第二臂32的一端部32a与第一臂30连接,并且另一端部32b与末端执行器26连接。另外,第一臂30构成为延伸长度不变,另一方面,第二臂32构成为能够沿着延伸方向伸缩。例如,第二臂32形成为将多个筒体重叠的套筒型,并且在侧面具备臂伸缩用气缸34。臂伸缩用气缸34的一端部32a的筒体的基端与另一端部32b的筒体的顶端连结,在控制部18的控制下使气缸轴进退,由此使另一端部32b的筒体相对于一端部32a的筒体进退而使第二臂32伸缩。
另一方面,多个关节部24具有:设置在基台20与第一臂30之间的第一关节部36、设置在第一臂30与第二臂32之间的第二关节部38以及设置在第二臂32与末端执行器26之间的第三关节部40。
第一关节部36由水平旋转部36a和上下旋转部36b构成,水平旋转部36a在基台20的上表面上,能够使第一臂30沿水平方向(沿着水平面)360°旋转,上下旋转部36b在水平旋转部36a的上部处,能够使第一臂30沿上下方向旋转。在水平旋转部36a和上下旋转部36b的内部分别设有未图示的伺服电机等。各伺服电机通过在控制部18的控制下被供给电力而旋转,并改变第一臂30的相对于基台20的水平方向的朝向和相对于水平方向的倾斜角度。
第二关节部38由轴承机构部38a和臂旋转用气缸38b构成,轴承机构部38a将第一臂30的另一端部30b与第二臂32的一端部32a连结成旋转自如,臂旋转用气缸38b与控制部18连接且在控制部18的控制下进退。臂旋转用气缸38b的气缸筒安装于第一臂30,相对于气缸筒相对地进退的气缸轴安装于第二臂32。即,第二臂32随着气缸轴的伸缩而以轴承机构部38a为中心旋转,从而调整与第一臂30的相对角度。
第三关节部40具有轴支承机构部40a和末端执行器移动用气缸40b,轴支承机构部40a在第二臂32的另一端部32b处使末端执行器26沿铅直方向下垂,末端执行器移动用气缸40b固定于轴支承机构部40a并沿铅直方向伸缩。轴支承机构部40a与第二臂32的角度无关地将末端执行器移动用气缸40b支承为铅直方向的姿势。末端执行器移动用气缸40b与控制部18连接,并构成为在控制部18的控制下通过末端执行器26而与工件W的把持/把持解除的动作联动地进退。
末端执行器26具有与第二臂32(第三关节部40)连结的框架42和固定于框架42的多个把持机构44。框架42由俯视观察时为长方形形状的外侧框架42a和在外侧框架42a的长边方向中央部沿着短边方向延伸的中间框架42b构成。外侧框架42a被设计成与输送的工件W的形状对应的平面尺寸。在中间框架42b的中央部(末端执行器26的水平面上的重心位置)固定有末端执行器移动用气缸40b的气缸轴。
多个把持机构44分别固定在外侧框架42a的长边方向的靠两侧的位置和外侧框架42a的短边方向中央部。即,本实施方式的末端执行器26具有六个把持机构44。各把持机构44具有基于压力流体(空气等)的供给和排出而动作的流体压力缸46、对工件W进行实际支承的支承体48以及变换流体压力缸46的动作力而使支承体48动作的动作传递部50。通过动作传递部50被螺纹拧紧等固定在外侧框架42a的侧面,从而把持机构44被固定在外侧框架42a的外侧。
流体压力缸46例如在缸孔内具有活塞和活塞杆(均未图示),并与供给和排出压力流体的管52连接。流体压力缸46在缸孔内基于供给到活塞的基端侧的压力流体而使活塞和活塞杆进出,基于供给到活塞的顶端侧的压力流体而使活塞和活塞杆后退。另外,流体压力缸46也可以是基于压力流体的供给和排出而使轴旋转的机构等。
支承体48构成能够在相对于工件W避让的避让位置和进入工件W的重力方向下侧的把持位置之间位移的铲运机。动作传递部50将流体压力缸46的活塞杆的进退时的动作力变换为铲运机的动作(避让位置和把持位置的移动)。
另外,本实施方式的末端执行器26具备多个对向流体压力缸46的压力流体的供给/排出进行切换的阀单元54。在各阀单元54的内部设置有电磁阀56。例如,阀单元54设置为与多个(六个)把持机构44(流体压力缸46)对应的数量。各阀单元54形成为相同的形状,并且以将阀单元54集中排列于搭载的连接器连接基座58的方式安装。即,本实施方式的无线阀组60包含多个阀单元54和连接器连接基座58而构成。该无线阀组60设置在外侧框架42a的外侧(侧部)。
具体而言,阀单元54具有:收容上述的电磁阀56的壳体62;设置在壳体62内的未图示的压力流体的流路;以及设置在壳体62内的在电磁阀56的动作下切换流路的未图示的流路切换部(均未图示)。壳体62形成为铅直方向长、宽度方向短的盒,在与连接器连接基座58的安装面设有多个分别与设置在该连接器连接基座58的多个端口连通的开口(未图示)。
各阀单元54构成为从连接器连接基座58供给电力,并基于该电力供给使电磁阀56动作。例如,电磁阀56适用如下的先导电磁阀:该先导电磁阀通过向未图示的螺线管供给电力供给而使未图示的可动阀部位移,从而使流路切换部的缠线板移动。流路切换部基于缠线板的移动来切换从规定的开口的压力流体的流出(或流入)。
如图2所示,连接器连接基座58具有能够配置多个阀单元54的阀组基座64和设置在阀组基座64的侧方的串行接口单元66(以下称为SI单元66)。另外,能够通过无线与机器人系统10的控制部18进行通信的无线组件68与连接器连接基座58(SI单元66)连接。
阀组基座64形成为能够将多个阀单元54沿宽度方向排列搭载的轨道状。阀组基座64使每个阀单元54具有使经过阀单元54的压力流体流出、或使压力流体流入的端口70。在阀组基座64的内部设置有与多个阀单元54的各开口、各端口70连通的未图示的连通路。与流体压力缸46相连的压力流体的流动用的管52与各端口70连接。
SI单元66作为通过无线组件68接收来自机器人系统10的控制部18(主)的控制信号并基于该控制信号进行适当的处理的从动装置而发挥作用。另外,检测末端执行器26的动作的未图示的传感器等与SI单元66连接,SI单元66将传感器的检测信号发送至控制部18。另外,安装于阀组基座64的结构不限定于SI单元66,连接器连接基座58也可以适用适当的配线方式的连接器单元。
SI单元66具有箱状的外壳72,在外壳72的外表面设置有未图示的多个连接器和显示部。作为多个连接器,例如可列举出与无线组件68连接的通信连接器、与地面连接的接地连接器、与阀单元54连接的输出连接器以及与传感器等连接的输入连接器等。另外,在外壳72内设有控制无线阀组60的动作的阀组控制器74(以下,仅称为控制器74)。
控制器74经由无线组件68接收来自控制部18的每个阀单元54的动作指令(控制信号),由此针对与动作指令对应的阀单元54在适当地时刻进行电力供给。多个阀单元54基于来自控制器74的电力供给而将电磁阀56的线圈设为通电状态,基于来自控制器74的电力非供给而将电磁阀56的线圈设为非通电状态。
另外,在SI单元66的外壳72内,设有向阀单元54供给电力的电池76、通过无线(无线)电力传输而进行电池76的充电的受电控制部78(受电部)以及在受电控制部78与电池76之间设置的电力稳定化电路80。
考虑充电容量、尺寸以及重量等而采用适当的电池76即可。控制器74是具有处理器、存储器以及输入输出接口的计算机,基于来自电池76的电力供给而动作,并进行适当的处理。例如、控制器74基于控制部18的动作指令,对规定的电磁阀56供给电池76的电力。另外,控制器74也可以是具有监视电池76的充电状态(电池SOC)并将SOC的信息向控制部18发送的功能的结构。
受电控制部78通过从无线阀组60的外部(后述的供电站82的供电部88)接受电力来对电池76进行充电。无线电力传输的方式没有特别的限定,可列举出磁场结合式、电解结合式、消逝波式、激光式、微波式、超声波式等,受电控制部78只要构成为与方式对应的结构即可。例如,受电控制部78在磁场结合式(磁场共鸣式)的情况下,作为形成规定的形状的受电线圈而构成,将由电磁感应产生的电动势经由电力稳定化电路80向电池76供给。电力稳定化电路80也可以具有对从电池76到电磁阀56的放电(电力供给)与从受电控制部78到电池76的充电进行切换的开关功能。
另外,受电控制部78设置在外壳72内的与配置多个阀单元54的一面相反的一侧的侧面侧。受电控制部78被配置为与外壳72的侧面充分地接近,并且在无线电力传输时与供电部88的距离被设定为尽可能地短。
并且,机器人系统10具备对以上的无线阀组60进行无线电力传输的供电站82。供电站82具备在规定的高度位置具有上表面84a的台部84和在上表面84a的规定位置设置的突出结构部86。而且供电站82在突出结构部86的内部具备对受电控制部78进行无线电力传输的供电部88,还具有对供电部88进行控制的站控制器89。站控制器89与控制部18连接。
供电站82设置在机器人16的末端执行器26的原点位置。例如,供电站82设置在隔着机器人16的输送带12的相反位置。机器人系统10可以是将返回(移动)到原点位置的末端执行器26载置在台部84的上表面84a的结构,也可以是以从上表面84a离开的状态待机的结构。另外,机器人系统10可以是将返回到原点位置的末端执行器26临时固定(设置)的结构,也可以是在原点位置维持自由状态的结构。
突出结构部86被配置为在末端执行器26返回(移动)到原点位置时,刚好无线阀组60的受电控制部78在与供电部88相对的位置。供电部88只要采用与无线电力传输的方式对应的适当的结构(与受电控制部78对应的结构)即可,例如在磁场结合式(磁场共鸣式)的情况下构成为送电线圈。
供电站82与外部的AC电源90连接,在AC电源90与供电部88之间设置有AC/DC转换器92等。另外,供电站82在供电部88构成为发射线圈的情况下,高频振荡器、电阻以及谐振电容器(未图示)等设置在供电部88的上游侧。
返回图1,机器人系统10的控制部18构成为具有未图示的处理器、存储器、输入输出接口以及无线组件的计算机。控制部18与机器人16的动作一起控制末端执行器26的动作,从而进行工件W的输送。在末端执行器26的控制中,控制部18经由无线组件通过无线通信向无线阀组60发送动作指令,使各电磁阀56动作。多个把持机构44基于所连接的阀单元54(电磁阀56)的动作而动作。
另外,控制部18控制机器人16的动作,使末端执行器26(无线阀组60)在工件W的处置位置与原点位置之间移动。工件W的处置位置例如包含末端执行器26在工件W的层叠部位对工件W进行把持的位置(工件W的取出位置:未图示)和移动被把持的工件W并解除把持的位置(工件W的载置位置)。在本实施方式中,载置位置在输送带12上。即,工件W的处置位置相当于机器人16对工件W的输送范围。
另一方面,原点位置相当于供电站82的设置位置。机器人系统10随着末端执行器26(无线阀组60)向原点位置移动,在设置于该原点位置的供电部88与无线阀组60的受电控制部78之间进行无线电力传输。
本实施方式的无线阀组60基本上是如上所述地构成的结构,以下,对其动作进行说明。
机器人系统10基于控制部18的控制使机器人16动作,通过末端执行器26对工件W进行把持,并使把持的工件W移动。工件W从取出位置被输送到图1中的输送带12(载置位置)。
在该工件W的输送中,控制部18在适当的时刻对末端执行器26所保持的无线阀组60进行动作指令。无线阀组60基于该动作指令向多个(规定)的阀单元54供给电池76的电力。在此,各把持机构44在阀单元54的电磁阀56的非通电状态下使支承体48位于避让位置。通过使电磁阀56成为通电状态,各把持机构44使支承体48移动到把持位置,从而把持工件W。在工件W的把持状态下,通过切断向单元54的电力供给,无线阀组60使支承体48从把持位置移动到避让位置,从而解除工件W的把持。
机器人系统10在控制部18的控制下对无线阀组60的电池76定期地进行充电。例如,控制部18在暂时停止工件W的输送的情况下(或者工件W的每一次输送),使机器人16动作,使末端执行器26移动到供电站82(原点位置)。
控制部18监视末端执行器26(无线阀组60)的坐标位置,当末端执行器26向原点位置移动时,基于正在监视的坐标位置与预先保留的原点位置,算出末端执行器26的移动路径。然后,使机器人16沿着移动路径动作,由此引导受电控制部78向供电部88接近并彼此相对。
如图2所示,当随着使末端执行器26返回原点位置而受电控制部78与供电部88相对时,机器人系统10实施从供电部88向受电控制部78的无线电力传输。例如,受电控制部78与供电部88的相对配置是基于供电部88中的磁场的检测并通过站控制器89或控制部18进行判断的。由此,无线阀组60的电池76向电磁阀56放电,对减少的电力进行充电。
另外,机器人系统10也可以是例如从无线阀组60向控制部18稳定地无线发送电池76的SOC(SOC:荷电状态)的结构。由此,控制部18在电池76接近充满电的(停止阈值以上的)情况下停止来自供电部88的供电。另外,控制部18也可以构成为,在SOC较低(充电要求阈值以下)的情况下,进行中断处理,使末端执行器26向原点位置移动。
另外,本发明不限定于上述的实施方式,可以根据发明的主旨进行各种改变。例如,无线阀组60的相对于末端执行器26的安装位置没有特别的限定。例如,无线阀组60可以是设置在框架42的中央部并在外壳72的下表面侧具备受电控制部78的结构。在该情况下,机器人系统10可以是将供电部88设置在供电站82的上表面84a内侧,将受电控制部78与供电部88上下相对配置来进行无线电力传输的结构。
另外,无线阀组60也可以扩展输入信号处理部100,该输入信号处理部100接收来自对流体压力缸46(或者包含其他流体促动器)等的流体促动器位置进行检测的传感器(未图示)的传感器输入。输入信号处理部100具有能够与各传感器连接的连接器100a,另外,在内部具有对传感器输入进行处理的电路。控制器74能够根据传感器输入良好地识别流体压力缸46的状态。
另外,设有无线阀组60的对象不限定于上述的机器人16。例如、图3A所示的第一变形例的机器人系统10A具备作为可动部14的圆盘94,该圆盘94能够利用驱动源(未图示)而沿周向旋转,在圆盘94的规定位置具有对工件W进行处置(输送等)的机构部94a。另一方面,无线阀组60设置在圆盘94的下表面(或者上表面84a)的规定的周向位置,并构成为随着圆盘94的旋转而一体地移动。
另外,无线阀组60在圆盘94的安装面的相反面(在图3A中为下表面)具备受电控制部78,受电控制部78构成为在圆盘94的规定的角度位置(原点位置)与供电站82的供电部88相对配置。由此,在原点位置通过无线电力传输对无线阀组60的电池76充电。
另外,例如,图3B所示的第二变形例的机器人系统10B具备作为可动部14的轨道96和滑块98,该轨道96和滑块98能够利用驱动源(未图示)而沿直线方向往复移动,在滑块98具有对工件W进行处置(输送等)的机构部98a。在该情况下,无线阀组60也设置在滑块98的下表面等并与滑块98一体地移动。而且,无线阀组60在滑块98返回到原点位置时,通过与供电站82的供电部88相对配置而对电池76进行充电。
以下记载从上述的实施方式能够掌握的技术思想和效果。
无线阀组60通过具备电池76和受电控制部78,由此能够在无线阀组60的暂时停止时等适当的时刻,通过无线电力传输对电池76进行充电。由此,可动部14没有通过该可动部14而向无线阀组60供给电力的线束,另外能够抑制电池76的充电容量,减小重量、尺寸。其结果是,能够实现可动部14的稳定的移动和无线阀组60的持续的动作。尤其是,在工厂内粉尘、油雾等飞散的环境下使用无线阀组60的机会较多,通过应用电池76和受电控制部78,能够减少内部结构的露出部分,从而大幅地提高防尘和防水性能。另外,电池76在性能劣化时能够更换。
另外,可动部14是具有末端执行器26的机器人16,无线阀组60设置在末端执行器26的侧部。由此,无线阀组60在移动末端执行器26而在外部的供电部88与受电控制部78之间进行无线电力传输时,末端执行器26受到影响的情况被抑制。例如,能够将受电控制部78配置在充分接近供电部88的位置,能够提高充电效率。
另外,设置有控制部18,该控制部18控制可动部14(机器人16)的动作,使无线阀组60至少在原点位置与工件W的处置位置之间移动,在无线阀组60移动到原点位置时,在受电控制部78与设于该原点位置的供电部88之间进行无线电力传输。这样,通过以使无线阀组60向原点位置移动为触发,在受电控制部78与供电部88之间进行无线电力传输,由此能够简单地对电池76进行充电。
另外,受电控制部78收容在外壳72的内部,并且设置在与电磁阀56的配置位置相反的一侧的侧面的附近位置,该外壳72设置在多个电磁阀56的排列方向的一端侧。这样,在外壳72的内部,在与电磁阀56的配置位置相反的一侧的侧面附近位置设置有受电控制部78,由此,无线阀组60在进行无线电力传输时能够充分地接近供电部88。
另外,无线阀组60能够扩展输入信号处理部,该信号处理部接收来自对流体促动器位置进行检测的传感器的传感器输入。这样,无线阀组60能够向识别流体压力缸46等的流体促动器位置从而切换电磁阀56的动作的控制部18进行状态通知等控制。
- 无线阀组
- 一种具有无线通讯的稳流配水阀组数据协议转换箱