一种基于感光器件噪声指纹的溯源系统
文献发布时间:2023-06-19 10:54:12
技术领域
本发明涉及图像被动取证技术领域,尤其涉及一种基于感光器 件噪声指纹的溯源系统。
背景技术
经检索,中国专利号CN102118249A公开了一种基于数字摘要和 数字签名的拍照取证方法,该发明属于数字图像主动取证技术,需 要事先嵌入额外信息来进行取证分析,因此实际应用效果不够理 想;感光器件噪声主要包括固定样本噪声(FPN)和光感应不均匀噪 声(PRNU),FPN是由暗电流产生的是指无光的情况下像素之间的差 异是一种加性噪声,其作为溯源依据是不可取的;而PRNU是由成像 传感器中的硅元素的同质性、均匀性不一致和制造过程的不理想产 生的,其PRNU也包含两部分,一部分是低频缺陷,是由光学表面的不平整、反射和折射等原因造成,不是传感器的固有属性,也不宜 作为溯源依据,另一部分是像素不一致性(PNU),是PRNU的主要组 成部分,由传感器的硬件缺陷和硅片的非均匀性引起的,不受温度 和湿度等影响,是数码照片来源认证的最优方式之一;目前,随着 数码设备和图像处理软件技术的快速发展,人们已可以很轻松地获 取和修改数字图像,这也导致图像篡改和图像伪造现象屡见不鲜; 因此发明出一种基于感光器件噪声指纹的溯源系统变得尤为重要。
现有的数字图像取证和溯源技术,需要事先向图像中嵌入数字 签名或数字摘要等额外信息来进行取证分析,其应用场景受到限 制,针对一些犯罪违法场景,无法提供帮助;为此,我们提出一种 基于感光器件噪声指纹的溯源系统。
发明内容
本发明的目的是为了解决现有技术中存在的缺陷,而提出的一 种基于感光器件噪声指纹的溯源系统。
为了实现上述目的,本发明采用了如下技术方案:
一种基于感光器件噪声指纹的溯源系统,包括参考图像采集模 块、参考图像PRNU降噪模块、均值计算模块、参考图像参考噪声值 获取模块、待测图像提取模块、待测图像PRNU降噪模块、待测图像 参考噪声值获取模块、阈值训练模块、相关系数计算模块和溯源判 断模块;
其中,所述参考图像PRNU降噪模块包括参考图像PRNU提取单 元、参考图像PRNU滤波单元和残留噪声获取单元;所述参考图像采 集模块用于利用可疑相机采集大量相片,并将每张图像作为参考图 像I
进一步地,所述参考图像PRNU降噪单元的具体降噪过程如下:
S1:给定某一图像I,计算其四级小波分解,得到每级小波分 解的水平细节分量h(i,j)、垂直细节分量v(i,j)及对角细节分量 d(i,j);
S2:对每个子带小波系数四个不同尺度的W*W邻域N,W∈ {3,5,7,9},利用最大似然估计来计算其原始无噪图像小波系数的方 差,其公式如下:
然后,选择四个方差中的最小值最为最后的估计结果:
S3:利用维纳滤波器得到降噪后的小波系数:
再将v(I,j)和d(I,j)均采用上述方法进行计算;
S4:对每级小波系数都重复上述S1-S3步骤,最后对降噪后的 小波系数利用小波反变换重建降噪后的图像I
所述残留噪声获取单元用于对无噪图像F
N
进一步地,所述均值计算模块用于对残留噪声值N
所述参考图像参考噪声值获取模块用于提取参考噪值N
进一步地,所述待测图像提取模块用于提取需要进行取证待测 图像的PRNU;待测图像PRNU降噪模块用于对待测图像进行处理, 得到待测参考噪声值NP,其具体处理过程如下:
SS1:提取待测图像的PRNU,并利用维纳滤波器对待测图像进 行滤波处理,得到待测残留噪声值;
SS2:将待测残留噪声值与待测图像的PRNU做差值,得到待测 参考噪声值NP;
所述待测图像参考噪声值获取模块用于提取待测参考噪声值 NP,并将其发送至相关系数计算模块。
进一步地,所述阈值训练模块用于通过训练噪声样本得到鉴别 鉴别阈值T,其具体公式如下:
式中:
进一步地,所述相关系数计算模块用于参考噪声值N
式中:NP,N
进一步地,所述溯源判断模块将鉴别阈值T和相关系数ρ作为 溯源判断依据,若相关系数ρ大于鉴别阈值T,则表示待测图像来 源于该可疑相机;若相关系数ρ小于或等于鉴别阈值T,则表示待 测图像并不来源于该可疑相机。
相比于现有技术,本发明的有益效果在于:
1、本发明设置有参考图像采集模块和参考图像PRNU降噪模 块,其参考图像采集模块用于采集相机感光器件上的PRNU作为噪声 指纹,然后通过利用维纳滤波器对待测图像进行滤波处理,得到待 测残留噪声值,并将待测残留噪声值与待测图像的PRNU做差值,得 到待测参考噪声值NP,有利于提高后续溯源判断的准确性;
2、本发明利用的是照相机固有的特性——PRNU作为噪声指纹 来进行相机溯源,由于PRNU的唯一性,使得即使两个拍摄设备是同 一型号也能区分,进而有利于提高图像来源识别的准确率,准确区 分每一个拍摄设备个体;并且本发明属于图像被动取证技术,相较 于图像主动取证技术,其应用场景更加广泛,使用更加灵活。
附图说明
附图用来提供对本发明的进一步理解,并且构成说明书的一部 分,与本发明的实施例一起用于解释本发明,并不构成对本发明的 限制。
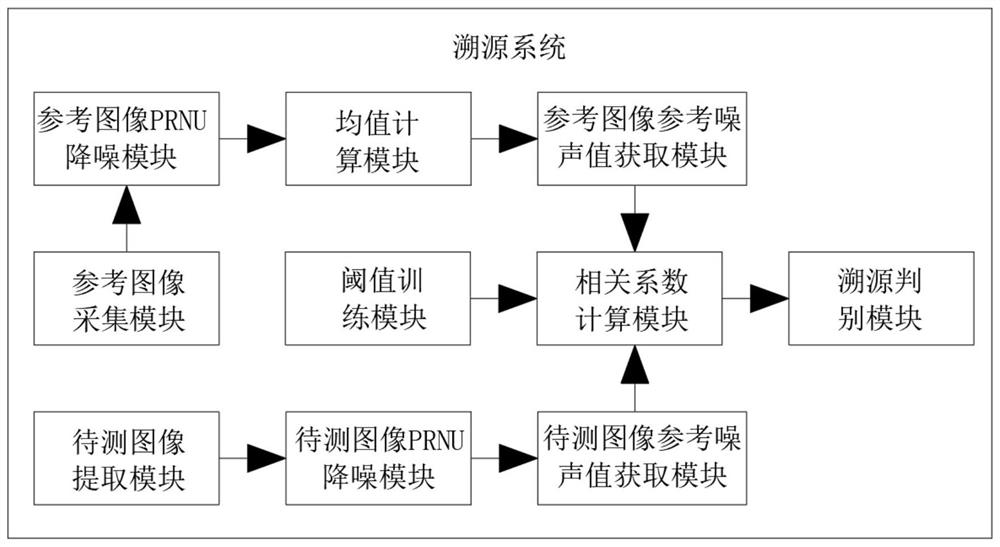
图1为本发明提出的一种基于感光器件噪声指纹的溯源系统的 整体结构示意图。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术 方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明 一部分实施例,而不是全部的实施例。
在本发明的描述中,需要理解的是,术语“上”、“下”、“前”、 “后”、“左”、“右”、“顶”、“底”、“内”、“外”等指示的方位或位 置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发 明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定 的方位、以特定的方位构造和操作,因此不能理解为对本发明的限 制。
参照图1,一种基于感光器件噪声指纹的溯源系统,包括参考 图像采集模块、参考图像PRNU降噪模块、均值计算模块、参考图像 参考噪声值获取模块、待测图像提取模块、待测图像PRNU降噪模 块、待测图像参考噪声值获取模块、阈值训练模块、相关系数计算 模块和溯源判断模块;
其中,参考图像PRNU降噪模块包括参考图像PRNU提取单元、 参考图像PRNU滤波单元和残留噪声获取单元;参考图像采集模块用 于利用可疑相机采集大量相片,并将每张图像作为参考图像I
参考图像PRNU降噪单元的具体降噪过程如下:
S1:给定某一图像I,计算其四级小波分解,得到每级小波分 解的水平细节分量h(i,j)、垂直细节分量v(i,j)及对角细节分量 d(i,j);
S2:对每个子带小波系数四个不同尺度的W*W邻域N,W∈ {3,5,7,9},利用最大似然估计来计算其原始无噪图像小波系数的方 差,其公式如下:
然后,选择四个方差中的最小值最为最后的估计结果:
S3:利用维纳滤波器得到降噪后的小波系数:
再将v(I,j)和d(I,j)均采用上述方法进行计算;
S4:对每级小波系数都重复上述S1-S3步骤,最后对降噪后的 小波系数利用小波反变换重建降噪后的图像I
残留噪声获取单元用于对无噪图像F
N
均值计算模块用于对残留噪声值N
参考图像参考噪声值获取模块用于提取参考噪值N
待测图像提取模块用于提取需要进行取证待测图像的PRNU;待 测图像PRNU降噪模块用于对待测图像进行处理,得到待测参考噪声 值NP,其具体处理过程如下:
SS1:提取待测图像的PRNU,并利用维纳滤波器对待测图像进 行滤波处理,得到待测残留噪声值;
SS2:将待测残留噪声值与待测图像的PRNU做差值,得到待测 参考噪声值NP;
待测图像参考噪声值获取模块用于提取待测参考噪声值NP,并 将其发送至相关系数计算模块。
阈值训练模块用于通过训练噪声样本得到鉴别鉴别阈值T,其 具体公式如下:
式中:
相关系数计算模块用于参考噪声值N
式中:NP,N
溯源判断模块将鉴别阈值T和相关系数ρ作为溯源判断依据, 若相关系数ρ大于鉴别阈值T,则表示待测图像来源于该可疑相 机;若相关系数ρ小于或等于鉴别阈值T,则表示待测图像并不来 源于该可疑相机。
本发明的工作原理及使用流程:该基于感光器件噪声指纹的溯 源系统,在使用前,需要通过参考图像采集模块采集可疑相机的大 量相片,并将每张图像作为参考图像I
以上所述,仅为本发明较佳的具体实施方式,但本发明的保护 范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露 的技术范围内,根据本发明的技术方案及其发明构思加以等同替换 或改变,都应涵盖在本发明的保护范围之内。
- 一种基于感光器件噪声指纹的溯源系统
- 一种基于数字指纹的文件安全管控和溯源的方法及系统