用于为机动车辆制定控制指令的方法
文献发布时间:2023-06-19 11:17:41
技术领域
本发明总体上涉及机动车辆的驾驶员辅助。
本发明更具体地涉及一种用于为机动车辆的一个或多个传动件(诸如转向系统、制动系统或动力传动系)制定控制指令的方法。
本发明还涉及一种机动车辆,该机动车辆包括计算单元和多个传感器,该多个传感器适合用于获取与该机动车辆的环境有关的原始数据。
本发明更具体地适用于配备有自主驾驶模式的车辆。因此,本发明可以适用于汽车领域、航空领域和航天领域。
背景技术
为了方便驾驶机动车辆并使机动车辆更安全,已知的做法是使后者配备有驾驶员辅助系统。这些可以是允许车辆自主驾驶(无需人工干预)的系统,或者是允许车辆部分地自主驾驶的系统(通常是适合用于暂时控制车辆例如以应用紧急制动或使车辆返回到其车道中央的系统)。
为使这些系统了解车辆周围的环境,在车辆上放置了多个传感器(诸如相机和RADAR传感器、LIDAR传感器、SONAR传感器等)。
每个传感器都有其品质和缺点。为了最大程度地减少环境检测错误,于是已知的做法是执行“数据融合”,也就是说,考虑由不同传感器传输的数据以便从其推导出单项环境数据。因此,可以从每个传感器的品质中获益。
不幸的是,即便如此,依然会发生车辆出错,也就是说,车辆对情况产生了误解。例如,车辆可能会将危险物体错认成无害的障碍物,并且因此没有命令紧急制动。
因此要设法减少这些错误。
发明内容
本发明提供了一种满足如标准ISO26262所定义的功能安全等级ASIL D(“汽车安全完整性等级D(Automotive Safety Integrity Level D)”的首字母缩略词)的新方法和新系统。
更具体地,根据本发明,提出了一种用于控制机动车辆的方法,该方法包括以下步骤:
-该车辆的计算单元接收由该车辆的传感器获取的并且与该车辆的环境有关的原始数据,
-该计算单元对所述原始数据进行处理以便从其推导出与该机动车辆的环境有关的信息以及与在推导出每项信息时出现错误的概率有关的概率系数,
-根据所述信息和所述概率系数来为该机动车辆制定控制指令,
-针对所述传感器中的至少第一传感器,确定与该第一传感器获取的原始数据的质量有关的质量系数,
-根据这些质量系数和这些概率系数来估计该控制指令的可靠性,以及
-根据所估计的该控制指令的可靠性来决定是否改正该控制指令。
因此,借助于本发明,可以考虑传感器的工作条件(通过确定这些传感器的质量系数)以决定是否可以像在完全安全的情况下一样使用针对机动车辆的控制指令。
通过示例的方式,可以确定亮度是否足够好,以认为由相机获取的数据是高质量的。还可以确定车辆是否正在穿过水雾(spray),以知道由LIDAR传感器获取的数据是否是高质量的。
根据本发明的控制方法的其他有利特征和非限制性特征如下:
-在该确定步骤中,这些传感器中的至少第一传感器的该质量系数是根据由所述传感器中的至少另一传感器获取的原始数据和/或根据第三方数据来确定的,该第三方数据是由第三方检测器获取的并且与由该第一传感器获取的该原始数据的测量条件有关;
-该第三方检测器是光传感器、或雨传感器、或适合用于检测该机动车辆正在其上行驶的道路的状态的传感器;
-所述传感器中的至少一个传感器是图像传感器、或RADAR传感器、或LIDAR传感器;
-在该处理步骤中,对由每个传感器传输的原始数据与其他传感器传送的原始数据分开进行处理,以便检测该机动车辆的环境中的物体并对所述物体进行分类,每个概率系数都与已分类的物体以及所述传感器相关联;
-在该处理步骤中,在处理了该原始数据后,通过考虑每个概率系数来融合已处理的数据;
-在该处理步骤中,在处理了该原始数据后,通过考虑每个质量系数来融合该已处理的数据;
-在该估计步骤中,还根据该已处理的数据的融合结果来估计该控制指令的可靠性;以及
-还根据来自不同于所述传感器的传感器的冗余信息来作出该是否改正该控制指令的决定。
本发明还涉及一种机动车辆,该机动车辆包括:多个传感器,该多个传感器适合用于获取与该机动车辆的环境有关的原始数据;以及计算单元,该计算单元适合用于实施如上所述的控制方法。
附图说明
参考通过非限制性示例的方式给出的附图的以下说明,将对本发明的内容以及本发明可以如何实施提供更好的理解。
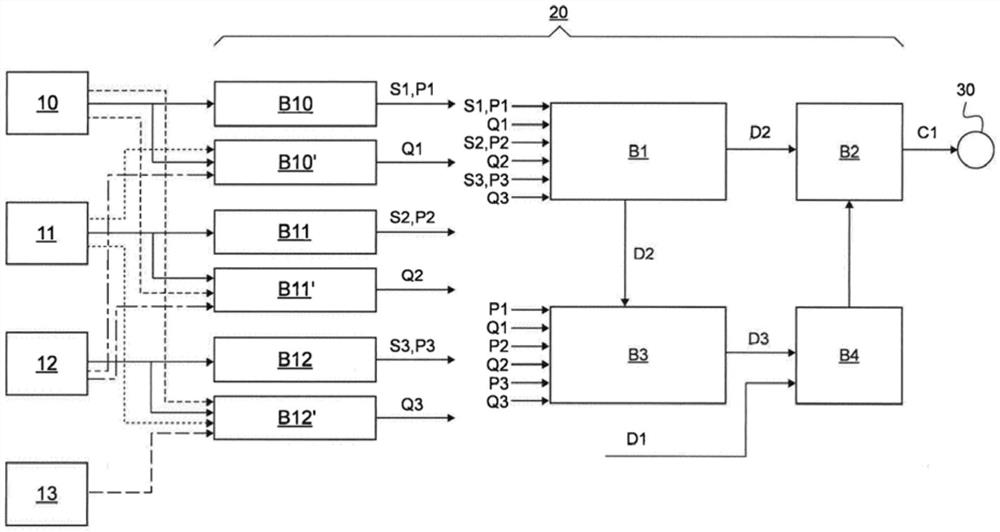
在附图中,图1是展示了适合用于实施根据本发明的方法的控制系统的图。
具体实施方式
本发明更具体地适用于配备有允许车辆自主驾驶(也就是说,无需人工干预)的控制系统的机动车辆。
本发明更准确地涉及一种用于控制机动车辆的至少一个传动件的方法。
该传动件可以例如由机动车辆的动力传动系、或由转向装置或由制动装置形成。在本说明书的剩余部分,将认为所有这些传动件都由车辆的计算单元控制。
图1的一部分中示出的该计算单元20包括处理器、存储器以及各个输入和输出接口。
该计算单元适合用于实施不同但是相互依赖的算法(这里以框的形式来表示)。
借助于其存储器,计算单元20存储有计算机应用程序,该计算机应用程序由包括指令的计算机程序组成,这些指令由处理器执行以允许实施下面将描述的方法。
借助于其输出接口,计算单元20以可以向传动件30传输控制指令C1的方式连接到这些传动件。
借助于其输入接口,计算单元20连接到若干个传感器10、11、12、13(至少两个传感器,但是优选地更多)。
这些可以是任何类型的传感器。
通过示例的方式,机动车辆可以配备有数码相机10、RADAR传感器11、LIDAR传感器12和光传感器13,这些传感器被定向为覆盖车辆周围的所有取向(即360度)。
光传感器13的存在使得能够提供自动打开车辆的灯的常规功能。
就其本身而言,其他传感器10、11、12(以下称为环境传感器)的存在是为了确保自主控制车辆这一功能。
这些环境传感器10、11、12中的每个传感器都具有品质和缺点。例如,相机在天气晴朗时可以进行良好的障碍物检测,但是在光线不足或过于明亮时检测效果就会较差。相反,无论光线如何,RADAR传感器或LIDAR传感器都能进行良好的障碍物检测,但是在出现水雾或恶劣天气(雨、雾、雪)时,它将提供不准确的数据。
在这里,主要根据由环境传感器10、11、12传输的原始数据来制定传输到传动件的控制指令C1。
然后可以参考图1来详细描述制定该控制指令C1的方式。
实际上,计算单元20被编程用于以固定的时间间隔、以递归的方式(也就是说,以循环的方式)来实施下面描述的方法。
该方法包括七个主要步骤。
在第一步骤期间,计算单元20读取所有传感器10、11、12、13已经获取的原始数据。
在这里考虑的示例中,计算单元20读取由相机10、RADAR传感器11、LIDAR传感器12和光传感器13传输的原始数据。
通过示例的方式,在相机10的情况下,原始数据是由相机的光敏传感器的每个像素的颜色特性和亮度特性形成的。在光传感器13的情况下,原始数据是由随时间测量的光水平形成的。
在第二步骤期间,对获取的原始数据进行处理以便从其推导出与机动车辆的环境有关的信息。
实际上,对由环境传感器10、11、12传输的原始数据彼此分开进行处理。
目的是在这些原始数据的基础上检测位于机动车辆的环境中的物体,对这些物体(障碍物、交通标志、第三方车辆、行人等)进行分类,并且为每个已分类的物体S1、S2、S3指配与在检测时和在对该物体进行分类时出现错误的概率有关的概率系数P1、P2、P3。
为了实施该步骤,可以使用基于机器学习技术(诸如例如“CNN”(“卷积神经网络(convolutional neural network)”))的分类方法。
作为变型或此外,可以使用过滤器或任何其他类型的适合处理。
总的来说,如图1所示,计算单元20包括三个框B10、B11、B12,这三个框分别接收来自相机10、来自RADAR传感器11和来自LIDAR传感器12的原始数据作为输入,并且这三个框分别传送已经被检测到和分类的每个物体的描述S1、S2、S3作为输出,已被检测到和分类的每个物体与概率系数P1、P2、P3相关联。
在第三步骤期间,计算单元20为环境传感器10、11、12中的每个环境传感器确定质量系数Q1、Q2、Q3。该质量系数Q1、Q2、Q3与由所讨论的传感器获取的原始数据的质量有关。
实际上,该质量系数Q1、Q2、Q3使得能够知道外部条件适合用于允许所讨论的传感器正确工作的程度。
换句话说,这些质量系数Q1、Q2、Q3使得能够确定:
-在考虑到例如环境光的情况下,相机10是否能够正确检测物体,以及
-在考虑到例如天气的情况下,RADAR传感器11和LIDAR传感器12是否能够正确检测物体。
每个质量系数Q1、Q2、Q3是根据由所讨论的传感器获取的原始数据(如实线箭头所表示的)并且还根据由其他传感器获取的原始数据(如虚线箭头所表示的)来确定的。
因此,可以根据由相机10获取的图像来确定天气并且可以由光传感器13获取环境光。
当然可以使用其他传感器,特别是用来确定天气。因此,可以使用雨传感器和/或可能位于车辆的车轮中并且适合用于检测机动车辆正在其上行驶的道路的状态的加速度计。
通过在此应用以下方法,使用来自传感器10、11、12、13的原始数据来确定每个质量系数Q1、Q2、Q3:
-统计方法(在来自相机10的原始数据的情况下,尤其可以使用“BRIQUE”法或“NIQUE”法),和/或
-频率方法(在来自相机10的原始数据的情况下,还可以使用“清晰度/模糊度”法或“高-低频率指数”法来确定图像的清晰度;在来自LIDAR传感器的原始数据的情况下,可以使用“带参考RMSE”法、“HDMAP和GPS”法或“协方差矩阵/熵测量”法)。
总的来说,如图1所示,计算单元20包括三个框B10'、B11'、B12',这三个框接收来自相机10和/或来自RADAR传感器11和/或来自LIDAR传感器12和/或来自光传感器13的原始数据作为输入,并且各自传送质量系数Q1、Q2、Q3作为输出,该质量系数与环境传感器10、11、12之一相关联并且与在考虑到驾驶条件的情况下该传感器进行的测量的精度水平有关。
如下面将变得明显的,为每个环境传感器10、11、12估计质量系数将使得能够有利于工作条件被估计为最好的并且因此传送最可靠的原始数据的一个或多个传感器。
在第四步骤期间,融合来自各个环境传感器10、11、12的数据。
为此,一方面可以融合由传感器获取的原始数据,另一方面可以融合来自框B10、B11、B12的数据。
然而,在此将考虑到仅来自框B10、B11、B12的数据(即,描述S1、S2、S3)将被融合。
在此通过考虑每个概率系数P1、P2、P3并且可能还根据每个质量系数Q1、Q2、Q3来融合这些数据。
“数据融合”指的是一种数学方法,该方法适用于来自异类传感器的若干数据,并且使得能够改进对机动车辆周围存在的物体的检测和分类。
例如,来自由相机10获取的图像的数据可以与来自RADAR传感器11和LIDAR传感器12的数据融合,以便更好地估计在由相机10获取的图像中检测到的物体的确切位置和动态(速度和加速度)。
然后,概率系数P1、P2、P3和质量系数Q1、Q2、Q3被用于动态地调节每个环境传感器10、11、12的权重,以对物体进行检测和分类。
总的来说,如图1所示,计算单元20包括框B1,该框接收检测到的物体的描述S1、S2、S3以及概率系数P1、P2、P3和质量系数Q1、Q2、Q3作为输入,并且传送结果D2作为输出,该结果包括已经被若干个环境传感器检测到并且已经被数据融合算法检查过的每个物体的描述(类别、位置和动态)。
借助于该结果D2,在第五步骤期间,计算单元20为机动车辆的各个传动件30制定控制指令C1。
为此,如图1所示,计算单元20包括框B2,该框接收来自框B1的结果D2作为输入,并且传送控制指令C1作为输出。
因此,控制指令C1是在考虑到计算单元20对车辆环境的评估的情况下产生的。
为防止该评估中的任何错误对车辆乘员造成危险后果,还提供了两个的额外步骤以使该方法安全。
在第六步骤期间,计算单元20根据质量系数Q1、Q2、Q3和概率系数P1、P2、P3来估计控制指令C1的可靠性。
实际上,控制指令C1的可靠性是通过可靠性系数D3来估计的。
用于计算该可靠性系数D3的算法可以例如基于将质量系数Q1、Q2、Q3与概率系数P1、P2、P3进行关联的方法。
优选地,可靠性系数D3将主要根据质量系数Q1、Q2、Q3来确定。
具体而言,如果这些质量系数Q1、Q2、Q3指示大多数环境传感器10、11、12的工作条件不允许车辆很好地了解其环境,那么将主要考虑该信息来确定可靠性系数D3时(无论概率系数的值是多少)。
换句话说,与质量系数Q1、Q2、Q3相比,概率系数P1、P2、P3具有的统计权重更低。
而且,用于确定给定传感器的质量系数的传感器数量越多,该质量系数在可靠性系数D3的计算中的权重就越大。
用于计算可靠性系数D3的算法将能够考虑其他数据。因此,优选地,还将根据融合的结果D2来估计可靠性系数D3。以这种方式,如果融合的结果D2不一致,那么在计算可靠性系数D3时将能够考虑该不一致。
总的来说,如图1所示,计算单元20包括B3,该框接收概率系数P1、P2、P3和质量系数Q1、Q2、Q3以及融合的结果D2作为输入,并且传送可靠性系数D3作为输出。
在第七步骤期间,然后计算单元20将作出是否改正控制指令C1的决定(在将该控制指令发送到传动件30之前)。
该决定主要通过考虑可靠性系数D3来作出。
优选地,该决定还将能够根据来自与直到此刻为止所考虑的传感器10、11、12不同的传感器的冗余信息D1来作出。
实际上,如果可靠性系数D3低于阈值和/或如果冗余信息D1指示所考虑的数据之间的不一致,则设想计算单元20将请求改正控制指令C1。
由该改正引起的动作可以是,例如,解除车辆的自主驾驶模式或停止考虑来自一个或多个先前确定的传感器的原始数据。
总的来说,如图1所示,计算单元20包括框B4,该框接收可靠性系数D3以及冗余信息D1作为输入,并且可能传送用于改正控制指令C1的指令作为输出。
该框B4由算法形成,该算法的目的是确保ISO26262标准的含义内的ASIL-D安全等级。
- 用于为机动车辆制定控制指令的方法
- 用于为机动车辆充电从而使其可以补偿谐波的装置、装备有这种充电装置的机动车辆及对应的充电方法