作业车辆、作业车辆的控制装置及控制方法
文献发布时间:2023-06-19 11:17:41
技术领域
本发明涉及作业车辆、作业车辆的控制装置及控制方法。
本申请针对2018年11月19日在日本申请的特愿2018-216735号而主张优先权,并将其内容援引于此。
背景技术
已知有搭载无级变速器的轮式装载机等作业车辆。作为无级变速器的例子,可举出HST(Hydraulic Static Transmission)以及HMT(Hydraulic MechanicalTransmission)。在专利文献1中公开了如下技术,在搭载无级变速器的作业车辆中,基于加速操作,以得到按照操作员的意图的输出转矩的方式决定向发动机的指令。
在先技术文献
专利文献
专利文献1:国际公开第2014/208614号
发明内容
发明要解决的课题
作业车辆以不仅能够进行铺砌的路面上的行驶、还能够进行崎岖路面或陡坡上的行驶、进而假定挖掘/推土/牵引等作业而能够对行驶装置施加强的力矩的方式设计。因此,在如专利文献1那样基于油门的操作来得到输出转矩的情况下,在操作员大力踩踏油门时,有可能违背操作员的意愿而在作业车辆的行驶中产生不必要的强的加速度,从而使乘坐舒适度恶化。另一方面,若以不产生强的加速度的方式始终限制输出转矩,则在崎岖路面等上由于转矩不足而产生车速降低等不良现象。
本发明的目的在于,提供一种以在赋予符合操作员的意愿的输出转矩的同时、不产生过度的加速度的方式对作业车辆的行驶进行控制的作业车辆、作业车辆的控制装置及控制方法。
用于解决课题的手段
根据本发明的第一方式,涉及一种作业车辆的控制装置,所述作业车辆具备:驱动源;行驶装置,其由所述驱动源的驱动力驱动;动力传递装置,其输入轴连接于所述驱动源,输出轴连接于所述行驶装置,所述动力传递装置将输入到所述输入轴的驱动力传递给所述输出轴;以及操作装置,其用于指示所述驱动源的驱动力的大小,其中,所述作业车辆的控制装置具备:要求输出转矩决定部,其基于所述操作装置的操作量和所述作业车辆的行驶速度,决定所述动力传递装置的要求输出转矩;行驶负载推定部,其基于所述驱动源的转矩、所述动力传递装置的旋转速度比和所述输出轴的转速,推定所述作业车辆的行驶负载所涉及的行驶负载转矩;要求输出转矩校正部,其以所述要求输出转矩落在包含所推定出的所述行驶负载转矩的允许输出转矩范围内的方式,对所述要求输出转矩进行校正;以及驱动源控制部,其基于校正后的所述要求输出转矩,输出所述驱动源的控制信号。
发明效果
根据上述方式中的至少一个方式,作业车辆的控制装置能够以不产生过度的加速度的方式控制作业车辆的行驶。
附图说明
图1是第一实施方式所涉及的作业车辆的侧视图。
图2是示出第一实施方式所涉及的驾驶室的内部的结构的图。
图3是示出第一实施方式所涉及的作业车辆的动力系统的示意图。
图4是示出第一实施方式所涉及的作业车辆的控制装置的结构的概略框图。
图5是示出第一实施方式所涉及的作业车辆的控制方法的流程图。
具体实施方式
<第一实施方式>
以下,参照附图对实施方式进行详细说明。
图1是第一实施方式的作业车辆的侧视图。
第一实施方式的作业车辆100是轮式装载机。作业车辆100具备车身110、工作装置120、前轮部130、后轮部140、驾驶室150。
车身110具备前车身111、后车身112、以及转向缸113。前车身111与后车身112安装位能够绕着沿车身110的上下方向延伸的转向轴转动。前轮部130设置于前车身111的下部,后轮部140设置于后车身112的下部。
转向缸113是液压缸。转向缸113的基端部安装于后车身112,前端部安装于前车身111。转向缸113在工作油的作用下伸缩,由此规定前车身111与后车身112所成的角度。换句话说,通过转向缸113的伸缩来规定前轮部130的舵角。
工作装置120用于土砂等作业对象物的挖掘以及搬运。工作装置120设置于车身110的前部。工作装置120具备动臂121、铲斗122、双臂曲柄123、提升缸124、铲斗缸125。
动臂121的基端部经由销安装于前车身111的前部。
铲斗122具备用于挖掘作业对象物的斗齿、以及用于搬运所挖掘出的作业对象物的容器。铲斗122的基端部经由销安装于动臂121的前端部。
双臂曲柄123将铲斗缸125的动力传递给铲斗122。双臂曲柄123的第一端经由连杆机构安装于铲斗122的底部。双臂曲柄123的第二端经由销安装于铲斗缸125的前端部。
提升缸124是液压缸。提升缸124的基端部安装于前车身111的前部。提升缸124的前端部安装于动臂121。提升缸124在工作油的作用下伸缩,由此动臂121向举起方向或者降下方向驱动。
铲斗缸125是液压缸。铲斗缸125的基端部安装于前车身111的前部。铲斗缸125的前端部经由双臂曲柄123安装于铲斗122。铲斗缸125在工作油的作用下伸缩,由此铲斗122向倾转方向或者卸料方向摆动。
驾驶室150是用于供操作员搭乘、且进行作业车辆100的操作的空间。驾驶室150设置于后车身112的上部。
图2是示出第一实施方式的驾驶室的内部的结构的图。在驾驶室150的内部设置有座椅151、加速踏板152、制动踏板153、转向盘154、前后切换开关155、换挡开关156、动臂杆157、铲斗杆158。
加速踏板152为了设定使作业车辆100产生的行驶的驱动力(牵引力)而被操作。加速踏板152的操作量越大,则目标驱动力(目标牵引力)被设定得越高。
制动踏板153为了设定使作业车辆100产生的行驶的制动力而被操作。制动踏板153的操作量越大,则设定越强的制动力。
转向盘154为了设定作业车辆100的舵角而被操作。
前后切换开关155为了设定作业车辆100的行进方向而被操作。作业车辆的行进方向是前进(F:Forward)、后退(R:Rear)、以及中立(N:Neutral)中的任一方。
换挡开关156为了设定动力传递装置的速度范围而被设定。通过换挡开关156的操作而从例如1速、2速、3速、以及4速之中选择一个速度范围。
动臂杆157为了设定动臂121的举起操作或者降下操作的移动量而被操作。动臂杆157通过向前方倾倒而采取降下操作,并通过向后方倾倒而采取举起操作。
铲斗杆158为了设定铲斗122的卸料操作或者倾转操作的移动量而被操作。铲斗杆158通过向前方倾倒而采取卸料操作,并通过向后方倾倒而采取倾转操作。
《动力系统》
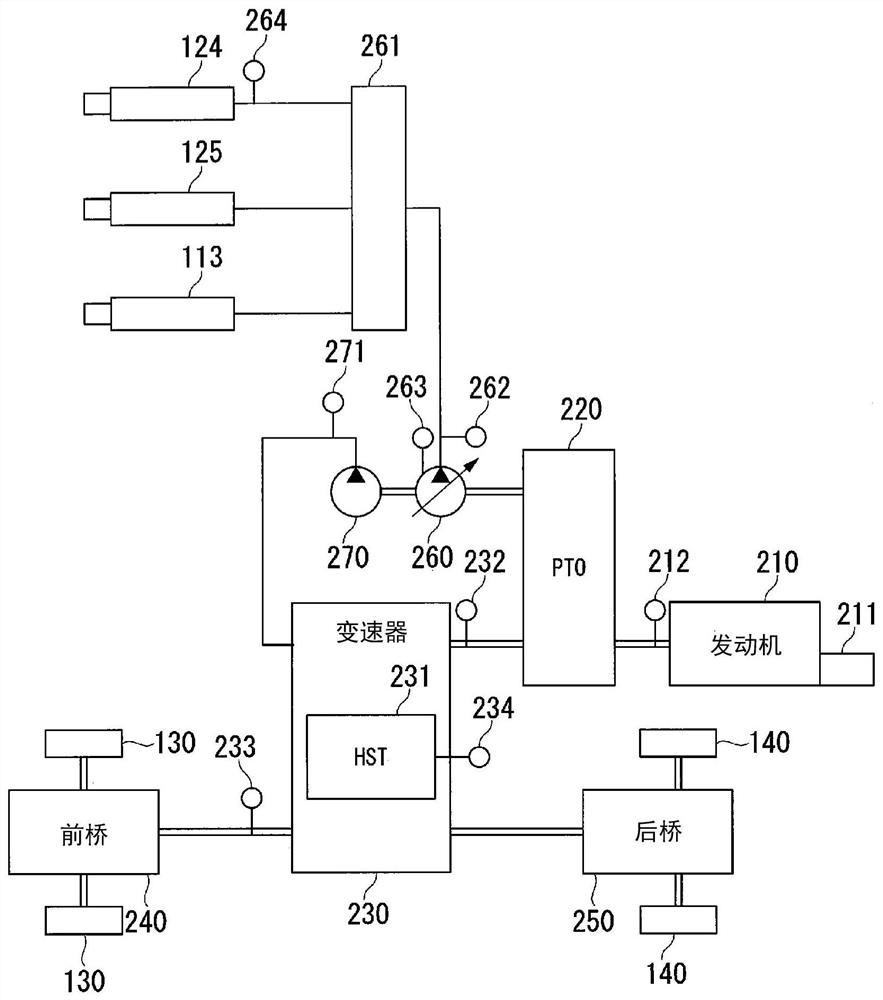
图3是示出第一实施方式的作业车辆的动力系统的示意图。
作业车辆100具备发动机210、PTO220(Power Take Off)、变速器230、前桥240、后桥250、可变容量泵260、固定容量泵270。
发动机210是例如柴油发动机。在发动机210设置有燃料喷射装置211以及发动机转速表212。燃料喷射装置211对向发动机210的缸内喷射的燃料量进行调整,由此控制发动机210的驱动力。发动机转速表212计测发动机210的转速。
PTO220将发动机210的驱动力的一部分传递给可变容量泵260以及固定容量泵270。换句话说,PTO220将发动机210的驱动力分配给变速器230、可变容量泵260以及固定容量泵270。
变速器230是具备HST231(静液压式无级变速器)的无级变速器。变速器230可以仅通过HST231来进行变速控制,但也可以是通过HST231与行星齿轮机构的组合来进行变速控制的HMT(液压机械式无级变速器)。变速器230将输入至输入轴的驱动力变速而从输出轴输出。变速器230的输入轴连接于PTO220,输出轴连接于前桥240以及后桥250。换句话说,变速器230将由PTO220分配的发动机210的驱动力传递给前桥240以及后桥250。在变速器230设置有输入轴转速表232以及输出轴转速表233。输入轴转速表232计测变速器230的输入轴的转速。输出轴转速表233计测变速器230的输出轴的转速。在变速器230的HST231设置有HST压力计234。HST压力计234计测HST231的压力。
前桥240将变速器230输出的驱动力传递给前轮部130。由此,前轮部130旋转。
后桥250将变速器230输出的驱动力传递给后轮部140。由此,后轮部140旋转。
前桥240以及后桥250是行驶装置的一例。
可变容量泵260由来自发动机210的驱动力驱动。可变容量泵260的排出容量例如通过设置于可变容量泵260内的斜板的倾转角的控制而变更。从可变容量泵260排出的工作油经由控制阀261供给到转向缸113、提升缸124、以及铲斗缸125。换句话说,控制阀261对从可变容量泵260排出的工作油的流量进行控制,并将工作油分配给转向缸113、提升缸124以及铲斗缸125。在可变容量泵260设置有第一泵压力计262以及泵容量计263。第一泵压力计262计测来自可变容量泵260的工作油的排出压力。泵容量计263基于可变容量泵260的斜板角等来计测可变容量泵260的容量。
在提升缸124设置有缸压力计264。缸压力计264计测提升缸124的压力。可变容量泵260是从PTO220分配动力的装置的一例。在其他实施方式中,可以是,可变容量泵260由多个泵构成,也可以是,取代可变容量泵260或除此之外,还具备未图示的液压驱动风扇等其他的供给目的地。
固定容量泵270由来自发动机210的驱动力驱动。从固定容量泵270排出的工作油供给到变速器230内的未图示的离合器。在固定容量泵270设置有第二泵压力计271。第二泵压力计271计测来自固定容量泵270的工作油的排出压力。固定容量泵270是从PTO220分配动力的装置的一例。固定容量泵270可以由多个泵构成,也可以是未图示的润滑回路等供给目的地。
《控制装置》
作业车辆100具备用于控制作业车辆100的控制装置300。
控制装置300根据驾驶室150内的各操作装置(加速踏板152、制动踏板153、转向盘154、前后切换开关155、换挡开关156、动臂杆157、铲斗杆158)的操作量向燃料喷射装置211、变速器230、可变容量泵260、以及控制阀261输出控制信号。
图4是示出第一实施方式的作业车辆的控制装置的结构的概略框图。控制装置300是具备处理器310、主存储器330、储存器350、接口370的计算机。
储存器350是非易失性的有形的存储介质。作为储存器350的例子,可举出HDD(Hard Disk Drive,硬盘驱动器)、SSD(Solid State Drive,固态驱动器)、磁盘、光磁盘、CD-ROM(Compact Disc Read Only Memory,光盘只读存储器)、DVD-ROM(DigitalVersatile Disc Read Only Memory,数字多功能光盘只读存储器)、半导体存储器等。储存器350可以是直接连接于控制装置300的总线的内部介质,也可以是经由接口370或者通信线路连接于控制装置300的外部介质。储存器350存储用于控制作业车辆100的程序。
程序可以是用于实现使控制装置300发挥的功能的一部分的程序。例如,程序可以是通过与已存储于储存器的其他程序的组合、或者通过与安装于其他装置的其他程序的组合来发挥功能的程序。需要说明的是,在其他实施方式中,计算机也可以除了上述结构之外、或者取代上述结构而具备PLD(Programmable Logic Device,可编程逻辑器件)等定制LSI(Large Scale Integrated Circuit,大规模集成电路)。作为PLD的例子,可举出PAL(Programmable Array Logic,可编程阵列逻辑)、GAL(Generic Array Logic,通用阵列逻辑)、CPLD(Complex Programmable Logic Device,复杂可编程逻辑器件)、FPGA(FieldProgrammable Gate Array,现场可编程门阵列)。在该情况下,由处理器实现的功能的一部分或者全部也可以通过该集成电路来实现。
也可以是,在程序由通信线路分发给控制装置300的情况下,接受到分发的控制装置300将该程序在主存储器330中展开,并执行上述处理。
另外,该程序也可以是用于实现前述的功能的一部分的程序。此外,该程序还可以是通过与已存储于储存器350的其他程序的组合来实现前述的功能的程序、即所谓的差分文件(差分程序)。
处理器310通过执行程序而具备操作量取得部311、计测值取得部312、车辆状态计算部313、要求PTO转矩决定部314、要求输出转矩决定部315、行驶负载推定部316、作业状态确定部317、允许范围决定部318、要求输出转矩校正部319、目标转速决定部320、加速转矩确定部321、目标发动机转矩决定部322、发动机控制部323、目标速度比决定部324、变速器控制部325、泵控制部326。
操作量取得部311分别从加速踏板152、制动踏板153、转向盘154、前后切换开关155、换挡开关156、动臂杆157、铲斗杆158取得操作量。以下,将加速踏板152的操作量称为加速操作量,将制动踏板153的操作量称为制动操作量,将转向盘154的操作量称为转向操作量,将对应于前后切换开关155的操作位置的值称为FNR操作量,将对应于换挡开关156的操作位置的值称为换挡操作量,将动臂杆157的操作量称为动臂操作量,将铲斗杆158的操作量称为铲斗操作量。
计测值取得部312从燃料喷射装置211、发动机转速表212、输入轴转速表232、输出轴转速表233、HST压力计234、第一泵压力计262、泵容量计263、缸压力计264、以及第二泵压力计271取得计测值。即,计测值取得部312取得发动机210的燃料喷射量、发动机210的转速、变速器230的输入轴的转速、变速器230的输出轴的转速、HST231的压力、可变容量泵260的泵压、可变容量泵260的容量、提升缸124的压力、以及固定容量泵270的泵压的各个计测值。
车辆状态计算部313基于计测值取得部312所取得的计测值,计算发动机210的输出转矩、发动机210的上限转矩、发动机210的角加速度、由PTO220向可变容量泵260以及固定容量泵270分配的转矩(PTO转矩)、变速器230的输入输出速度比、变速器230的输出轴的角加速度、作业车辆100的行驶速度。发动机210的输出转矩是指基于燃料喷射量所计算的发动机210实际发挥的转矩。发动机210的上限转矩是指发动机210能够发挥的最大的转矩。
要求PTO转矩决定部314基于操作量取得部311所取得的转向操作量、动臂操作量、及铲斗操作量、以及计测值取得部312所取得的可变容量泵260的泵压、可变容量泵260的容量、及固定容量泵270的泵压的计测值,决定从PTO220向可变容量泵260以及固定容量泵270分配的转矩的要求值(要求PTO转矩)。例如,要求PTO转矩决定部314基于规定操作量与要求流量的关系的PTO变换函数,根据转向操作量求出可变容量泵260的要求流量。再例如,要求PTO转矩决定部314基于PTO变换函数,根据动臂操作量以及铲斗操作量求出可变容量泵260的要求流量。并且,要求PTO转矩决定部314基于可变容量泵260的泵压、可变容量泵260的容量、以及固定容量泵270的泵压的计测值、以及所确定的可变容量泵260的要求流量,决定要求PTO转矩。
要求输出转矩决定部315基于操作量取得部311所取得的加速操作量、制动操作量、换挡操作量、及FNR操作量、以及车辆状态计算部313所计算出的行驶速度,决定变速器230的输出轴的转矩的要求值(要求输出转矩)。例如,要求输出转矩决定部315基于规定行驶速度与要求输出转矩的关系的行驶变换函数,根据车辆状态计算部313所计算出的行驶速度求出要求输出转矩。此时,要求输出转矩决定部315基于加速操作量、制动操作量、换挡操作量、以及FNR操作量来决定行驶变换函数的特性。
具体地说,要求输出转矩决定部315确定与多个速度范围对应的多个行驶变换函数中的、与由换挡操作量确定的速度范围对应的行驶变换函数。要求输出转矩决定部315在存在加速操作的情况下,对基于加速操作量的倍率所确定的行驶变换函数进行变形。要求输出转矩决定部315在存在制动操作的情况下,对基于制动操作量的倍率所确定的行驶变换函数进行变形。要求输出转矩决定部315基于FNR操作量决定要求输出转矩的符号。需要说明的是,在要求输出转矩与行驶速度的符号不一致的情况(要求输出转矩与行驶速度的积的符号为负的情况)下,通过变速器230发挥制动侧的转矩。
行驶负载推定部316基于车辆状态计算部313所计算出的发动机210的输出转矩T
行驶负载转矩T
[式1]
I
需要说明的是,式(1)能够根据表示发动机210的输出转矩T
[式2]
[式3]
作业状态确定部317基于操作量取得部311取得的操作量以及计测值取得部312取得的计测值,确定作业车辆100的作业状态。作业状态的值例如具有“停止/低速状态”、“行驶状态”、“挖掘状态”、“制动状态”、“急制动状态”。
“停止/低速状态”是作业车辆100不进行挖掘作业而停止,或者作业车辆100以低速度行驶中的状态。作业状态确定部317可以在例如行驶速度的绝对值小于规定值的情况下,判断作业状态为“停止/低速状态”。
“行驶状态”是作业车辆100前进或者后退中的状态。作业状态确定部317可以在例如提升缸124的压力的计测值小于规定值且加速操作量大于0的情况下,判断作业状态为“行驶状态”。
“挖掘状态”是正通过工作装置120进行挖掘作业的状态。作业状态确定部317可以在例如提升缸124的压力的计测值为规定值以上的情况下,判断作业状态为“挖掘状态”。另外,作业状态确定部317电可以根据例如工作装置120的姿态来判断作业状态是否为“挖掘状态”。在该情况下,计测值取得部312取得未图示的计测各缸的行程的行程传感器、计测工作装置的旋转角的角度传感器的计测值,作业状态确定部317基于该计测值来判断作业状态是否为“挖掘状态”。
“制动状态”是作业车辆100制动中的状态。作业状态确定部317可以在例如制动器操作量大于0的情况下,判断作业状态为“制动状态”。另外,作业状态确定部317可以在例如FNR操作量取与当前的行驶方向相反方向的值的情况下,判断作业状态为“制动状态”。
“急制动状态”是作业车辆100以比“制动状态”更强的力制动中的状态。作业状态确定部317可以在例如制动器操作量大于规定值的情况下,判断作业状态为“急制动状态”。
允许范围决定部318基于作业状态确定部317所确定的作业状态,决定用于校正要求输出转矩的允许输出转矩范围。具体地说,允许范围决定部318基于作业状态确定部317所确定的作业状态来决定允许加速度。允许范围决定部318通过将行驶负载转矩加上与允许加速度相当的加速转矩来决定允许输出转矩范围的上限值,并通过将行驶负载转矩减去与允许加速度相当的加速转矩来决定允许输出转矩范围的下限值。
允许输出转矩范围的上限值T
[式4]
[式5]
α
对作业状态与允许加速度的关系的例子进行说明。
允许范围决定部318在作业状态为“行驶状态”的情况下,将允许加速度设定为不损害操作员的乘坐舒适度的程度的加速度(例如,0.2G)。由此,在“行驶状态”下,作业车辆100的加速度始终落在不损害操作员的乘坐舒适度的程度的加速度的范围内。
允许范围决定部318在作业状态为“挖掘状态”的情况下,将允许加速度设定为比“行驶状态”所涉及的允许加速度小的值。在“挖掘状态”下,在行驶负载推定部316推定的行驶负载转矩中包含对工作装置120施加的负载。换句话说,“挖掘状态”下的行驶负载转矩成为与“行驶状态”相比较大的值。因此,通过抑制允许加速度,从而在对工作装置120施加的负载急剧减少时等,能够抑制无意的急加速。
允许范围决定部318在作业状态为“挖掘状态”且正进行倾转操作的情况下,将允许加速度设定为比未进行倾转操作时的“挖掘状态”所涉及的允许加速度小的值。在“挖掘状态”下进行倾转操作中的情况下,通过铲斗122向倾转方向的摆动而进行挖掘,行驶负载转矩急剧降低的可能性较高。因此,通过抑制允许加速度,从而能够抑制进行挖掘时产生的急加速。
允许范围决定部318在作业状态为“停止/低速状态”的情况下,将允许加速度设定为比“行驶状态”所涉及的允许加速度小的值。由此,能够抑制无意的紧急起步。
允许范围决定部318在作业状态为“制动状态”的情况下,将允许加速度设定为比“行驶状态”所涉及的允许加速度大的值。在“制动状态”下,操作员有意进行快速的制动的可能性较高。因此,能够进行立即的制动。
允许范围决定部318在作业状态为“急制动状态”的情况下,将允许加速度设定为比“制动状态”所涉及的允许加速度更大的值。在“急制动状态”下,在未图示的盘式制动器工作以进行制动时,在行驶负载推定部316推定的行驶负载转矩中包含该盘式制动器施加的负载。因此,允许范围决定部318将允许加速度设定为较大的值,以使得根据允许输出转矩范围而不会阻碍由盘式制动器进行的制动。
要求输出转矩校正部319对要求输出转矩进行校正,以使得要求输出转矩落在允许范围决定部318所决定的允许输出转矩范围内。换句话说,要求输出转矩校正部319在要求输出转矩超过允许输出转矩范围的上限值的情况下,将要求输出转矩校正为允许输出转矩范围的上限值。要求输出转矩校正部319在要求输出转矩低于允许输出转矩范围的下限值的情况下,将要求输出转矩校正为允许输出转矩范围的下限值。
目标转速决定部320基于根据要求输出转矩和行驶速度所计算的要求行驶能量与根据要求PTO转矩和发动机210的转速的计测值所计算的要求PTO输出的和即要求发动机输出,来决定用于控制发动机210的目标发动机转速。目标转速决定部320基于通过预先设计等所确定的、规定要求发动机输出与发动机转速的关系的转速变换函数,来决定目标发动机转速。转速变换函数也可以是如下设计,例如,在能够发挥要求发动机输出且不阻碍发动机加速度的范围内,尽可能地将发动机210的旋转抑制为低旋转侧。
另外,目标转速决定部320决定为了实现由要求PTO转矩决定部314所计算出的可变容量泵260的要求流量所需的发动机的转速(PTO必要转速)。目标转速决定部320基于通过预先设计等所确定的、规定可变容量泵260的要求流量与发动机转速的关系的转速变换函数,来决定PTO必要转速。目标转速决定部320在目标发动机转速低于PTO必要转速的情况下,将目标发动机转速决定为PTO必要转速。
加速转矩确定部321基于计测值取得部312所取得的发动机210的转速的计测值以及目标转速决定部320所决定的目标发动机转速,计算为了使发动机210以目标发动机转速旋转所需的目标加速转矩。即,加速转矩确定部321根据发动机210的转速的计测值与目标发动机转速之差的转速来决定目标发动机加速度,并将目标发动机加速度乘以发动机210的惯性力矩,由此计算目标加速转矩。
目标发动机转矩决定部322基于车辆状态计算部313所计算出的PTO转矩、发动机210的上限转矩、及变速器230的输入输出速度比、通过要求输出转矩校正部319校正后的要求输出转矩、以及计测值取得部312所计测出的发动机210的转速,决定发动机210应输出的转矩即目标发动机转矩。目标发动机转矩决定部322将要求输出转矩乘以变速器230的输入输出速度比,由此计算为了得到要求输出转矩所需的发动机210的转矩即要求输入转矩。目标发动机转矩决定部322将PTO转矩与要求输入转矩的和、以及发动机210的上限转矩中的较小的一方决定为目标发动机转矩。
发动机控制部323向燃料喷射装置211输出发动机转矩指令。具体地说,发动机控制部323输出表示目标发动机转矩决定部322所决定的目标发动机转矩的发动机转矩指令。发动机控制部323是驱动源控制部的一例。
目标速度比决定部324基于变速器230的输入轴的转速的计测值、变速器230的输出轴的转速的计测值、行驶负载推定部316所推定出的行驶负载转矩、由要求输出转矩校正部319校正后的要求输出转矩、以及加速转矩确定部321所确定的目标发动机加速度,确定变速器230的目标输入输出速度比。具体地说,目标速度比决定部324基于变速器230的输出轴的转速、行驶负载转矩、以及目标输出转矩,推定经过规定的控制周期的时间后的变速器230的输出轴的转速,并将其设定为输出轴的目标转速。目标速度比决定部324基于变速器230的输入轴的转速以及目标发动机加速度,推定经过规定的控制周期的时间后的变速器230的输入轴的转速,并将其设定为输入轴的目标转速。目标速度比决定部324将输出轴的目标转速除以输入轴的目标转速,由此决定目标输入输出速度比。
变速器控制部325为了实现目标速度比决定部324所决定的目标输入输出速度比,输出变速器230的控制指令。在变速器230为HST或HMT的情况下,变速器控制部325输出例如变速器230所具备的可变容量马达以及可变容量泵的容量指令。
泵控制部326为了实现要求PTO转矩决定部314所决定的要求PTO转矩,输出可变容量泵260的控制指令。
《作业车辆的控制方法》
图5是示出第一实施方式的作业车辆的控制方法的流程图。
首先,操作量取得部311分别从加速踏板152、制动踏板153、转向盘154、前后切换开关155、换挡开关156、动臂杆157、铲斗杆158取得操作量(步骤S1)。另外,计测值取得部312从燃料喷射装置211、发动机转速表212、输入轴转速表232、输出轴转速表233、第一泵压力计262、泵容量计263、缸压力计264、以及第二泵压力计271取得计测值(步骤S2)。
接下来,车辆状态计算部313基于在步骤S2中取得的计测值,计算发动机210的输出转矩、发动机210的上限转矩、发动机210的角加速度、PTO转矩、变速器230的输入输出速度比、变速器230的输出轴的角加速度、作业车辆100的行驶速度(步骤S3)。
要求PTO转矩决定部314基于在步骤S1中取得的转向操作量、动臂操作量、及铲斗操作量、以及在步骤S2中取得的可变容量泵260的泵压及容量、及固定容量泵270的泵压的计测值,决定要求PTO转矩(步骤S4)。要求输出转矩决定部315基于在步骤S1取得的与行驶相关的操作量、以及在步骤S3中计算出的行驶速度,决定要求输出转矩(步骤S5)。行驶负载推定部316基于在步骤S3中计算出的车辆状态的值,推定行驶负载转矩(步骤S6)。
作业状态确定部317基于在步骤S1中取得的操作量以及在步骤S2中取得的计测值,确定作业车辆100的作业状态(步骤S7)。换句话说,作业状态确定部317确定作业状态是“停止/低速状态”、“行驶状态”、“挖掘状态”、“制动状态”、“急制动状态”中的哪一个。
允许范围决定部318基于作业状态确定部317所确定的作业状态来决定允许加速度(步骤S8)。允许范围决定部318基于在步骤S6中推定出的行驶负载转矩以及在步骤S8中决定的允许加速度来决定允许输出转矩范围(步骤S9)。
要求输出转矩校正部319判断在步骤S5中决定的要求输出转矩是否超过在步骤S9中决定的允许输出转矩范围的上限值(步骤S10)。在要求输出转矩超过允许输出转矩范围的上限值的情况下(步骤S10:是),要求输出转矩校正部319将要求输出转矩校正为允许输出转矩范围的上限值(步骤S11)。
在要求输出转矩不超过允许输出转矩范围的上限值的情况下(步骤S10:否),要求输出转矩校正部319判断要求输出转矩是否低于允许输出转矩范围的下限值(步骤S12)。在要求输出转矩低于允许输出转矩范围的下限值的情况下(步骤S12:是),要求输出转矩校正部319将要求输出转矩校正为允许输出转矩范围的下限值(步骤S13)。
在要求输出转矩不低于允许输出转矩范围的下限值的情况下(步骤S12:否),要求输出转矩校正部319不对要求输出转矩进行校正。
目标转速决定部320基于根据要求输出转矩和行驶速度计算的要求行驶能量、与根据要求PTO转矩和发动机210的转速的计测值计算的要求PTO输出的和即要求发动机输出,决定目标发动机转速(步骤S14)。加速转矩确定部321基于发动机210的转速的计测值以及在步骤S14中决定的目标发动机转速来计算目标加速转矩(步骤S15)。目标发动机转矩决定部322基于要求输出转矩、在步骤S3中计算出的PTO转矩、发动机的上限转矩、及变速器230的输入输出速度比、以及在步骤S2中取得的发动机210的转速的计测值,决定目标发动机转矩(步骤S16)。
发动机控制部323输出表示在步骤S17中决定的目标发动机转矩的发动机转矩指令(步骤S17)。
目标速度比决定部324基于变速器230的输入轴的转速的计测值、变速器230的输出轴的转速的计测值、行驶负载转矩、目标输出转矩、以及目标发动机加速度,决定目标输入输出速度比(步骤S18)。变速器控制部325输出用于实现目标输入输出速度比的变速器230的控制指令,泵控制部326为了实现在步骤S4中决定的要求PTO转矩,输出可变容量泵260的控制指令(步骤S19)。
控制装置300每隔规定的控制周期执行上述的控制处理。
《作用/效果》
这样,根据第一实施方式的控制装置300,对基于操作量和行驶速度所决定的要求输出转矩以落在包含行驶负载转矩的允许输出转矩范围内的方式进行校正。由此,作业车辆100的加速度被限制为与行驶负载转矩与允许输出转矩范围的上限值或下限值的差所涉及的转矩相当的加速度。因此,控制装置300能够以不会产生过度的加速度的方式对作业车辆的行驶进行控制。
另外,第一实施方式的控制装置300基于作业车辆100的作业状态决定允许加速度范围。由此,控制装置300能够对应于作业状态来限制加速度。需要说明的是,其他实施方式的控制装置300也可以将允许加速度范围设定为固定范围。
在第一实施方式中,作业状态为“挖掘状态”时的允许输出转矩范围是比作业状态为“行驶状态”时的允许输出转矩范围窄的范围。即,作业状态为“挖掘状态”时所允许的加速度比作业状态为“行驶状态”时所允许的加速度小。由此,能够抑制在挖掘时产生急加速的情况。
另外,在第一实施方式中,作业状态为“挖掘状态”下正进行倾转操作时的允许输出转矩范围是比作业状态为“挖掘状态”下未进行倾转操作时的允许输出转矩范围窄的范围。由此,能够抑制挖掘进行中产生急加速的情况。
在第一实施方式中,作业状态为“制动状态”时的允许输出转矩范围是比作业状态为“行驶状态”时的允许输出转矩范围宽的范围。即,作业状态为“制动状态”时所允许的加速度比作业状态为“行驶状态”时所允许的加速度大。由此,能够按照操作员的意愿进行作业车辆的立即制动。另外,在第一实施方式中,作业状态为“急制动状态”时所允许的加速度比作业状态为“行驶状态”时所允许的加速度大。由此,能够防止在通过操作员的操作来进行盘式制动器的制动的情况下盘式制动器的制动受到阻碍的情况。
以上,参照附图对一实施方式进行了详细说明,但具体结构并不局限于上述方式,能够进行各种各样的设计变更等。
例如,第一实施方式的作业车辆100将发动机210作为驱动源,但并不局限于此。例如,其他实施方式的作业车辆100也可以将蓄电池与电动马达的组合作为驱动源。在该情况下,也可以在电动马达的惯性力矩足够小的情况下,忽略电动马达的加速转矩来计算行驶负载转矩以及目标输出转矩。另外,在其他实施方式中,在将蓄电池与电动马达的组合作为驱动源的情况下,控制装置300也可以不使用驱动源的转矩、动力传递装置的旋转速度比和输出轴的转速而直接推定输出轴转矩。
另外,第一实施方式的作业车辆100的变速器230是无级变速器,但并不局限于此。例如,其他实施方式的变速器230也可以是变矩式变速器。
另外,第一实施方式的作业车辆100是轮式装载机,但并不局限于此。例如其他实施方式的作业车辆100也可以是推土机以及拖拉机等其他作业车辆100。在该情况下,也可以当作业车辆100在行驶中不利用从PTO220分配的驱动力的情况下,忽略PTO转矩来计算行驶负载转矩以及目标输出转矩。
工业实用性
根据上述方式中的至少一个方式,作业车辆的控制装置能够以不产生过度的加速度的方式控制作业车辆的行驶。
附图标记说明:
100…作业车辆;110…车身;113…转向缸;120…工作装置;121…动臂;122…铲斗;124…提升缸;125…铲斗缸;152…加速踏板;153…制动踏板;154…转向盘;155…前后切换开关;156…换挡开关;157…动臂杆;158…铲斗杆;210…发动机;220…PTO;230…变速器;240…前桥;250…后桥;260…可变容量泵;270…固定容量泵;300…控制装置;311…操作量取得部;312…计测值取得部;313…车辆状态计算部;314…要求PTO转矩决定部;315…要求输出转矩决定部;316…行驶负载推定部;317…作业状态确定部;318…允许范围决定部;319…要求输出转矩校正部;320…目标转速决定部;321…加速转矩确定部;322…目标发动机转矩决定部;323…发动机控制部;324…目标速度比决定部;325…变速器控制部;326…泵控制部。
- 作业车辆、作业车辆的控制装置、以及作业车辆的控制方法
- 作业车辆的控制装置、作业车辆及作业车辆的控制方法