用于保护离合器控制系统的过电流的设备和方法
文献发布时间:2023-06-19 11:27:38
技术领域
本公开的示例性实施方式涉及一种用于保护离合器控制系统的过电流的设备和方法,并且更具体地,涉及一种通过将过电流划分为预定数量的级别、监测和诊断各个级别并且在诊断各个级别的过程中限制目标负荷,可以确保离合器控制系统的安全性和最大性能的用于保护离合器控制系统的过电流的装置和方法。
背景技术
iMT(电子离合器)系统是一种生态友好的控制系统,其将动力总成中的离合器控制从现有的液压控制转换为电机控制。在该系统中,控制器级别上使用的电流量与系统级别上使用的转矩量基本相同,并且控制器需要使用最大转矩,以便在打开离合器的过程中快速到达目标位置。这会影响驾驶员在起步和换挡过程中的乘坐舒适性和换挡性能。因此,有必要通过最大程度地利用安装在离合器控制系统的控制器上的电机的性能来执行离合器打开/关闭控制。
然而,在相关动力总成电机控制模型中,与最大性能相比,没有考虑到安全性就执行了控制器保护和过电流诊断。用于高性能控制的电流会根据其级别而不同地影响电机和控制器。例如,当基本维持60A和400ms时,控制器可能正常,但电机可能烧毁,而在30A和3s的情况下,电机可能正常,但控制器可能烧毁。
此外,离合器控制系统需要连续地保持对电机的控制,但是当施加过电流从而诊断出故障时,由于电机IC被关闭,因此不可能操作电机。因此,在高速行驶期间可以进行减速和停止,但是不能进行换挡,这给系统带来了沉重的负担。
在这方面,需要开发能够考虑电机和控制器的不同损坏指标区域来诊断每种过电流并保护控制器的技术。
本公开的背景技术在韩国专利注册第10-1339205号(2013年12月3日注册,题为“用于诊断混合电动车辆的油泵控制单元的过电流的方法和系统”)中公开。
发明内容
各个实施方式旨在提供用于保护离合器控制系统的过电流的设备和方法,该设备和方法能够诊断每个过电流并考虑电机和控制器的不同损坏指标区域来保护控制器。
本公开要解决的问题不限于上述问题,并且本领域技术人员将从以下描述中清楚地理解其他未提及的问题。
在实施方式中,用于保护离合器控制系统的过电流的设备包括:电机;逆变器,包括多个开关元件,并且逆变器被配置为通过多个开关元件的接通和断开将DC电转换成AC电,并且将AC电提供给电机;电机控制单元,被配置为检测提供给电机的电流;以及微型计算机,具有针对每个预定数量的级别而设置的用于过电流检测的过电流阈值,并且微型计算机被配置为将所检测到的电流与针对每个级别的过电流阈值进行比较,以诊断是否存在与过电流相对应的级别,当存在与过电流相对应的级别时,测量过电流持续时间并基于过电流持续时间来控制逆变器。
在本公开中,微型计算机可包括过电流诊断单元,被配置为将电流与针对每个级别的过电流阈值进行比较,以诊断电流是否为过电流,并诊断与过电流相对应的级别;以及过电流保护单元,被配置为通过操作与过电流相对应的级别的相应计数器来测量过电流持续时间,并且当过电流持续时间大于或等于针对级别设置的极限时间时,将用于控制多个开关元件的脉冲宽度调制信号的占空比限定为针对级别设置的目标占空比。
在本公开中,过电流保护单元基于极限时间将目标占空比保持预定时间,并且然后解除目标占空比限定。
在本公开中,当过电流持续时间大于或等于针对级别设置的故障诊断时间时,过电流保护单元可以将电机确定为故障。
在本公开中,计数器可以将用于测量过电流持续时间的递增计数时段设置为与用于测量在过电流诊断之后处于正常状态的时间的递减计数时段不同,并且可以将递减计数时段设置为大于递增计数时段。
根据本公开的实施方式的用于保护离合器控制系统的过电流的设备可以通过将过电流划分为预定数量(例如四个)的级别,监测和诊断各个级别,以及在诊断各个级别的过程中限制目标负荷,确保离合器控制系统的安全性和最大性能。
本公开的效果不限于前述效果,并且可以包括根据以下描述对于本领域技术人员显而易见的范围内的各种效果。
附图说明
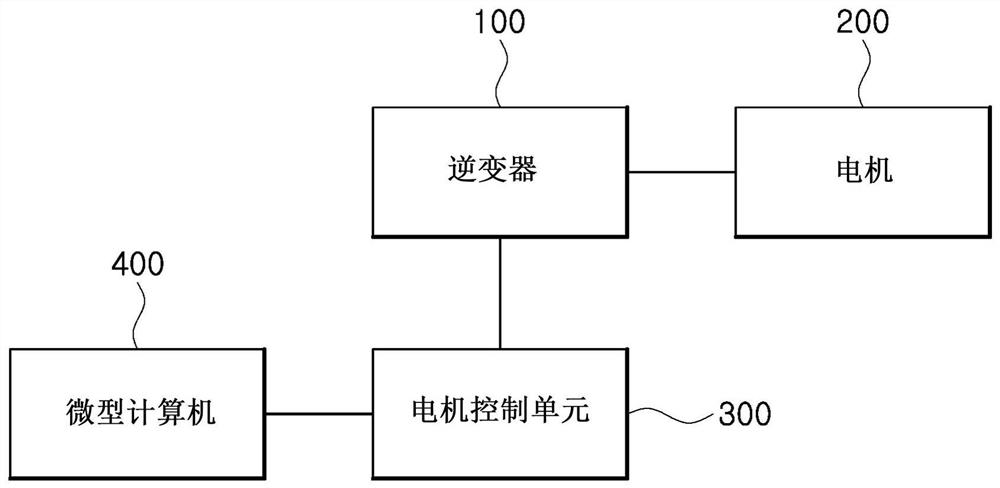
图1是用于说明根据本公开的实施方式的用于保护离合器控制系统的过电流的设备的框图。
图2是示出图1所示的微型计算机的更详细的框图。
图3是用于说明根据本公开的实施方式的用于保护离合器控制系统的过电流的方法的流程图。
图4是用于说明根据本公开的实施方式的用于保护离合器控制系统的过电流的方法的状态图。
图5是用于说明根据本公开的实施方式的用于诊断离合器控制系统的过电流的方法的图。
图6是用于说明根据本公开的实施方式的用于保护离合器控制系统的过电流的方法的图。
具体实施方式
在下文中,将在下面参考附图描述根据本公开的实施方式的用于保护离合器控制系统的过电流的设备和方法。在该过程中,为了清楚和便于说明的目的,可能夸大附图中示出的线的粗细或元件的尺寸。
此外,稍后描述的术语是考虑到本公开中其功能而定义的术语,并且可以根据用户或操作者的意图或实践来改变。因此,应基于本说明书的公开内容来定义这些术语。
图1是用于说明根据本公开的实施方式的用于保护离合器控制系统的过电流的设备的框图,并且图2是示出图1所示的微型计算机的更详细的框图。
参照图1,根据本公开的实施方式的用于保护离合器控制系统的过电流的设备包括逆变器100、电机200、电机控制单元300和微型计算机400。
电机200是接收从逆变器100提供的三相AC电并产生旋转力的元件,并且可以采用本领域中已知的各种类型的电机。
逆变器100是将存储在电源(例如,电池)(未示出)中的DC电转换成用于驱动电机的AC电的元件,并且可以包括多个开关元件S1至S6,其接通/断开状态由微型计算机400提供的脉冲宽度调制信号控制。
逆变器100由多个开关元件组成,并且能够以脉冲宽度调制(PWM)方案控制多个开关元件以产生AC电。即,逆变器100根据从电机控制单元300施加的控制信号将从电源提供的DC电压转换为三相AC电压,从而驱动电机200。在脉冲宽度调制方案中,逆变器100中包括的用于控制开关元件的脉冲宽度调制信号具有预定的周期,并且具有重复其高/低状态的脉冲的形式,并控制占空周期或占空比(其是脉冲宽度调制信号的高部分的比率),因此,可以调节提供给电机200的电量。
构成逆变器100的开关元件可以由绝缘栅双极型晶体管(IGBT)、MOSFET、晶体管和继电器中的任何一种构成。
逆变器100包括保护电路。保护电路监测电力流,并且当由于各种原因(例如后端碰撞或车辆碰撞和雷击)而将过电压或过电流引入电源时,会分散或切断电力,从而保护混合动力车辆中提供的所有系统,并稳定地保护乘员免受高压。
电机控制单元300根据从微型计算机400输出的PWM控制信号的占空比值输出三相电机驱动信号。
此外,电机控制单元300检测提供给电机200的电流,并将检测到的电流输出到微型计算机400。
提供微型计算机400以控制逆变器100,并且可以通过以脉冲宽度调制方案切换逆变器100中的开关元件S1至S6来调节电机200的输出。
基本上,为了将电机200的转矩控制为期望值,微型计算机400可以进行适当地调整逆变器100的开关元件S1到S6的占空度(占空比)的脉冲宽度调制控制。
此外,针对预定数量的级别中的每一个而设置用于过电流检测的过电流阈值,并且微型计算机400将由电机控制单元300检测到的电流与针对每个级别的过电流阈值进行比较,诊断在每个级别处是否存在过电流,当存在有被诊断为过电流的级别时,测量过电流持续时间,并基于该过电流持续时间来控制逆变器100。在这种情况下,基于过电流持续时间,微型计算机400可以将提供给逆变器100的开关元件的脉冲宽度调制信号的占空比限定为针对相应级别设置的目标占空比。针对每个级别,可以设置过电流阈值、过电流阈值的容许时间、电流限制的极限时间以及用于诊断故障状况的故障诊断时间。极限时间可以短于容许时间,例如为容许时间的1/2,并且故障诊断时间可以大于或等于容许时间。
例如,在微型计算机400中,用于过电流检测的过电流阈值可以分别设置为四个级别(第一级别、第二级别、第三级别和第四级别)。即,可以针对第一级别设置第一过电流阈值,可以针对第二级别设置第二过电流阈值,可以针对第三级别设置第三过电流阈值,可以针对第四级别设置第四过电流阈值,且过电流阈值可具有彼此不同的值。此外,针对第一级别、第二级别、第三级别和第四级别中的每一个,可以设置相应的过电流阈值的容许时间、极限时间和故障诊断时间。即,可以设置第一过电流阈值的第一容许时间、第一极限时间和第一故障诊断时间,且可以设置第二过电流阈值的第二容许时间、第二极限时间和第二故障诊断时间。此外,可以设置第三过电流阈值的第三容许时间、第三极限时间和第三故障诊断时间,且可以设置第四过电流阈值的第四容许时间、第四极限时间和第四故障诊断时间。在此,当该值以第一过电流阈值至第四过电流阈值的顺序增大时,该值可以以第一容许时间(第一极限时间和第一故障诊断时间)至第四容许时间的顺序减小,或相反亦然。
因此,微型计算机400可以将由电机控制单元300检测到的电流与第一过电流阈值、第二过电流阈值、第三过电流阈值和第四过电流阈值中的每一个进行比较。作为比较结果,当检测到的电流大于或等于第三过电流阈值和第四过电流阈值时,微型计算机400可以将检测到的电流诊断为第三级别和第四级别的过电流。在这种情况下,微型计算机400可以分别操作第三级别和第四级别的计数器(未示出),从而测量第三过电流持续时间(在第三级别为过电流持续时间)和第四过电流持续时间(在第四级别为过电流持续时间)。微型计算机400可以将第三过电流持续时间与第三极限时间进行比较,将第四过电流持续时间与第四极限时间进行比较,并且根据比较结果来控制脉冲宽度调制信号的占空比。例如,当第三过电流持续时间大于或等于第三极限时间时,微型计算机400可以控制脉冲宽度调制信号的占空比。当第四过电流持续时间大于或等于第四极限时间时,微型计算机400可以控制脉冲宽度调制信号的占空比。
根据本公开的实施方式,这样的微型计算机400是由设置程序或包括微处理器的硬件操作的一个或多个微处理器,并且该设置程序可以形成为用于控制脉冲宽度调制信号的占空比的一系列命令,这将在下面描述。
如图2所示,微型计算机400可以包括过电流诊断单元410和过电流保护单元420。
过电流诊断单元410将检测到的电流与每个级别的过电流阈值进行比较,诊断检测到的电流是否为过电流,并且诊断与该过电流相对应的级别。
过电流保护单元420通过操作由过电流诊断单元410诊断为过电流的级别的计数器来测量过电流持续时间,并且当过电流持续时间大于或等于针对该级别设置的极限时间时,将脉冲宽度调制信号的占空比限定为针对该级别设置的目标占空比。
例如,过电流诊断单元410可以将检测到的电流与第一过电流阈值、第二过电流阈值、第三过电流阈值和第四过电流阈值中的每一个进行比较。作为比较结果,当检测到的电流大于或等于第三过电流阈值和第四过电流阈值时,过电流诊断单元410可以将检测到的电流诊断为第三级别和第四级别的过电流。在这种情况下,过电流保护单元420可以测量第三级别的第三过电流持续时间和第四级别的第四过电流持续时间中的每一个。然后,当第三过电流持续时间大于或等于第三极限时间时,过电流保护单元420可以将脉冲宽度调制信号的占空比限定为针对第三级别设置的第三目标占空比。此外,当第四过电流持续时间大于或等于第四极限时间时,过电流保护单元420可以将脉冲宽度调制信号的占空比限定为针对第四级别设置的第四目标占空比。
此外,过电流保护单元420可以在目标占空比限定之后将目标占空比保持预先设置的预定时间,并且可以在目标占空比保持时间之后释放目标占空比限定。预定时间可以与目标占空比保持时间基本相同,并且例如可以是诸如极限时间的两倍的任意设置时间。此外,目标占空比保持时间可以被称为恢复时间,并且恢复时间可以指示过渡到正常状态所需的时间。
此外,当过电流持续时间大于或等于针对相应级别设置的故障诊断时间时,过电流保护单元420可以确定故障。例如,当第四过电流持续时间大于或等于第四故障诊断时间时,过电流保护单元420可以确定故障。
如上所述,通过将过电流划分为预定数量的(例如四个)级别,监测和诊断各个级别,并且在诊断各个级别的过程中限制目标占空比,用于保护过电流的装置可以保证离合器控制系统的安全和最佳性能。
本公开的实施方式已经描述了将过电流分为四个级别并且监测和诊断基本上相同的电机;然而,在使用诸如DCT的四个电机200的系统中,监测每个电机200也是可能的。
图3是用于说明根据本公开的实施方式的用于保护离合器控制系统的过电流的方法的流程图,以及图4是用于说明根据本公开的实施方式的用于保护离合器控制系统的过电流的方法的状态图。
参照图3,微型计算机400将提供给电机200的电流与针对每个级别的预设过电流阈值进行比较(S310),并诊断每个级别处是否存在过电流(S320)。即,微型计算机400可以将提供给电机200的电流与针对各个级别设置的每个过电流阈值进行比较,并且确定是否存在电流大于或等于过电流阈值的级别。
作为步骤S320中的诊断结果,当存在被诊断为过电流的级别时,微型计算机400测量被诊断为过电流的级别的过电流持续时间(S330)。在这种情况下,当被诊断为过电流的级别的数量是2或更大时,微型计算机400可以测量被诊断为过电流的级别的每个过电流持续时间。
当执行步骤S330时,微型计算机400确定过电流持续时间是否大于或等于针对该级别设置的极限时间(S340)。即,微型计算机400可以将针对每个级别测量的过电流持续时间与针对该级别设置的极限时间进行比较,并且确定是否存在其过电流持续时间大于或等于该级别的极限时间的级别。
作为S340的确定结果,当存在过电流持续时间大于或等于极限时间的级别时,微型计算机400将脉冲宽度调制信号的占空比限定为针对该级别设置的目标占空比(S350)。
当执行步骤S350时,微型计算机400将目标占空比保持预设的恢复时间(S360),并在目标占空比保持时间之后释放目标占空比限定。
可以通过图4所示的状态图来描述上述用于保护过电流的方法。在图4中,正常状态可以指示其中供应给电机200的电流小于每个级别的过电流阈值的状态,以及警告状态1可以指示其中电流被诊断为过电流并且过电流持续时间小于极限时间的状态。警告状态2可以指示其中电流被诊断为过电流,过电流持续时间大于或等于极限时间,并且已经执行了脉冲宽度调制信号的占空比控制的状态。故障状态可以指示其中过电流持续时间大于或等于故障诊断时间的状态。当过电流持续时间为“0”时,警告状态1和警告状态2可能会返回正常状态。
图5是用于说明根据本公开的实施方式的用于诊断离合器控制系统的过电流的方法的图。
图5示出了针对三个级别设置用于过电流检测的过电流阈值(即阈值A(18A)、阈值B(20A)和阈值C(50A)的情况。在这种情况下,由于在“a”处的电流大于或等于阈值A(18A),因此微型计算机400可以将电流诊断为与第一级别相对应的过电流,并且通过操作计数器A来测量第一过电流持续时间。在这种情况下,除计数器A以外的其他计数器B和C可不工作。
此外,由于“b”处的电流大于或等于阈值B(20A),因此微型计算机400可以将电流诊断为与第一级别和第二级别相对应的过电流,并通过操作计数器B测量第二个过电流持续时间。在这种情况下,计数器A可以连续测量第一过电流持续时间,而计数器C可不运行。
此外,由于在“c”处的电流小于阈值B(20A),所以微型计算机400可以将第二级别诊断为正常状态,并且对计数器B进行递减计数。在这种情况下,由于第一级别处于过电流状态,则计数器A可以连续测量第一过电流持续时间。
此外,由于在“d”处的电流小于阈值A(18A),因此微型计算机400可以将第一级别诊断为正常状态,并且对计数器A进行递减计数。在这种情况下,由于第一级别处于过电流状态,则计数器A可以连续测量第一过电流持续时间。
此外,当第一过电流持续时间大于或等于“e”中的第一极限时间时,微型计算机400可以确定故障。
如上所述,在过电流状态为故障(Fault)的情况下,微型计算机400可以对计数器进行递增计数,以测量过电流持续时间,而在正常状态Normal的情况下,可以对计数器进行递减计数,在这种情况下,微型计算机400可以将用于测量过电流持续时间的递增计数时段设置为与用于测量在过电流诊断之后的正常状态下的时间的递减计数时段不同。即,微型计算机400可以将递减计数时段设置为大于递增计数时段。例如,微型计算机400可以将递减计数时段设置为递增计数时段的两倍。
图6是用于说明根据本公开的实施方式的用于保护离合器控制系统的过电流的方法的图。
参照图6,第一区域610是第三过电流阈值大于或等于55A的区域,并且在200ms的第三极限时间之后的目标占空比可以被限定为65%。然后,电流可以限定为48A。当目标占空比限定后经过了400ms(200ms*2)的恢复时间时,可以解除占空比限制。然后,可以再次保持55A或更大的电流持续200ms的第三极限时间,然后将目标占空比限定为65%。
第二区域620是第二过电流阈值大于或等于40A的区域,并且在1000ms的第二极限时间之后,目标占空比可以被限定为44%。
第三区域630是第一过电流阈值大于或等于30A的区域,并且在2,000ms的第一极限时间之后的目标占空比可以被限定为24%。
如上所述,通过将过电流划分为预定数量的(例如四个)级别,监测和诊断各个级别,并且在诊断各个级别的过程中限制目标占空比,根据本公开的实施方式的用于保护离合器控制系统的过电流的装置可以保证离合器控制系统的安全性和最大性能。
尽管已经参考附图中示出的实施方式描述了本公开,但是本公开的实施方式仅用于说明目的,并且本领域技术人员将理解,由此可以进行各种修改和其他等效实施方式。
因此,本公开的真实技术范围应由所附权利要求书限定。
- 用于保护离合器控制系统的过电流的设备和方法
- 用于保护车辆的电流回路的设备和方法以及电流回路