马达驱动的车辆
文献发布时间:2023-06-19 11:30:53
技术领域
本发明涉及一种马达驱动的车辆。
背景技术
日本未审查专利申请公开第2019-187100号(JP 2019-187100A)公开了一种包括马达作为驱动力源的马达驱动的车辆。在这样的马达驱动的车辆中,基于马达的温度状况来控制马达的负载率。在行驶中限制马达的负载率时,执行限制在限制负载率的限制状态下(即,在限制马达的输出转矩的限制状态下)的转矩限制行驶(参照JP 2019-187100 A)。
发明内容
在可以执行用于将车辆自动停在目标驻车位置的自动驻车控制的马达驱动的车辆中,当在不依赖用户的加速踏板操作的情况下自动控制自动驻车控制期间车辆的驱动力以及在自动驻车控制期间限制用于行驶的马达的输出转矩时,由于自动驻车的减速、车辆在坡道上回滚等,用户的不适感或不安感可能会增加。
本公开提供了一种马达驱动的车辆,当在自动驻车控制期间限制了用于行驶的马达的输出转矩时,该马达驱动的车辆可以执行用于尽可能减少用户对于自动驻车控制的不适感或不安感的自动驻车控制。
根据本发明的第一方案的马达驱动的车辆,包括用于行驶的马达;驱动马达的逆变器;控制器,其被配置为在不依赖于用户的车辆操作的情况下,执行用于将马达驱动的车辆停在目标驻车位置的自动驻车控制,并且当负载限制率小于阈值时,禁止或停止所述自动驻车控制,所述负载限制率表示能够响应于所述马达的要求转矩而从所述马达输出的转矩的限制水平。
根据以上方案,由于当负载限制率小于阈值时禁止或停止自动驻车控制,因此能够避免马达的输出转矩受到限制而继续执行自动驻车控制的情况。因此,对于马达驱动的车辆,能够减少用户对于自动驻车控制的不适感或不安感。
在上述方案中,控制器可以被配置为:当马达的温度上升时,降低负载限制率;并且当负载限制率由于马达的温度上升而变为小于阈值时,禁止或停止自动驻车控制。
在以上方案中,控制器可以被配置为:当逆变器的温度上升时,降低负载限制率;并且当负载限制率由于逆变器的温度上升而变为小于阈值时,禁止或停止自动驻车控制。
在以上方案中,控制器可以被配置为控制负载限制率,使得马达的温度为第一温度时的负载限制率小于马达的温度为第二温度时的负载限制率,第二温度低于第一温度。
在以上方案中,控制器可以被配置为,当马达的温度大于第一阈值并且马达的温度上升时,降低负载限制率。
在以上方案中,控制器可以被配置为控制负载限制率,使得逆变器的温度为第三温度时的负载限制率小于逆变器的温度为第四温度时的负载限制率,第四温度低于第三温度。
在以上方案中,控制器可以被配置为,当逆变器的温度大于第二阈值并且逆变器的温度上升时,降低负载限制率。
利用上述配置,当负载限制率由于马达或逆变器的温度上升而变为小于阈值时,禁止或停止自动驻车控制。因此,能够避免由于马达或逆变器的温度上升而限制马达的转矩,但是继续执行自动驻车控制的情况。结果,对于马达驱动的车辆,能够减少用户对于自动驻车控制的不适感或不安感。
在以上方案中,控制器可以被配置为,当要求自动驻车控制并且负载限制率小于阈值时,禁止自动驻车控制。
利用该配置,当要求自动驻车控制并且负载限制率小于阈值时,可以禁止自动驻车控制。
在以上方案中,控制器可以被配置为,在正在执行自动驻车控制时,当负载限制率小于阈值时停止自动驻车控制。
利用该配置,当执行自动驻车控制并且负载限制率小于阈值时,能够停止自动驻车控制。
在以上方案中,控制器可以包括:自动驻车控制单元,其被配置为执行自动驻车控制;以及驱动力控制单元,其被配置为在没有执行所述自动驻车控制时,控制所述马达驱动的车辆的驱动力。驱动力控制单元可以被配置为向自动驻车控制单元输出驱动力可用范围,所述驱动力可用范围表示在所述自动驻车控制单元正在执行所述自动驻车控制时的所述驱动力的可能输出范围。自动驻车控制单元可以被配置为在驱动力可用范围内正在执行自动驻车控制时控制驱动力。驱动力控制单元可以被配置为:判定负载限制率是否小于阈值;以及当负载限制率小于阈值时,将输出至自动驻车控制单元的驱动力可用范围设定为0。自动驻车控制单元可以被配置为当驱动力可用范围为0时,禁止或停止自动驻车控制。
利用该配置,通过将从驱动力控制单元输出到自动驻车控制单元的驱动力可用范围设定为0,能够禁止或停止自动驻车控制。因此,利用该马达驱动的车辆,例如,通过在自动驻车控制停止时将驱动力可用范围缓慢改变为0,或在重新开始自动驻车控制时从0缓慢改变驱动力可用范围,能够抑制驱动力的快速变化。
利用根据本公开的马达驱动的车辆,可以尽可能减少用户对于自动驻车控制的不适感或不安感。
附图说明
下面将参照附图描述本发明的示例性实施例的特征、优点以及技术和工业意义,其中,相同的标号表示相同的元件,并且其中:
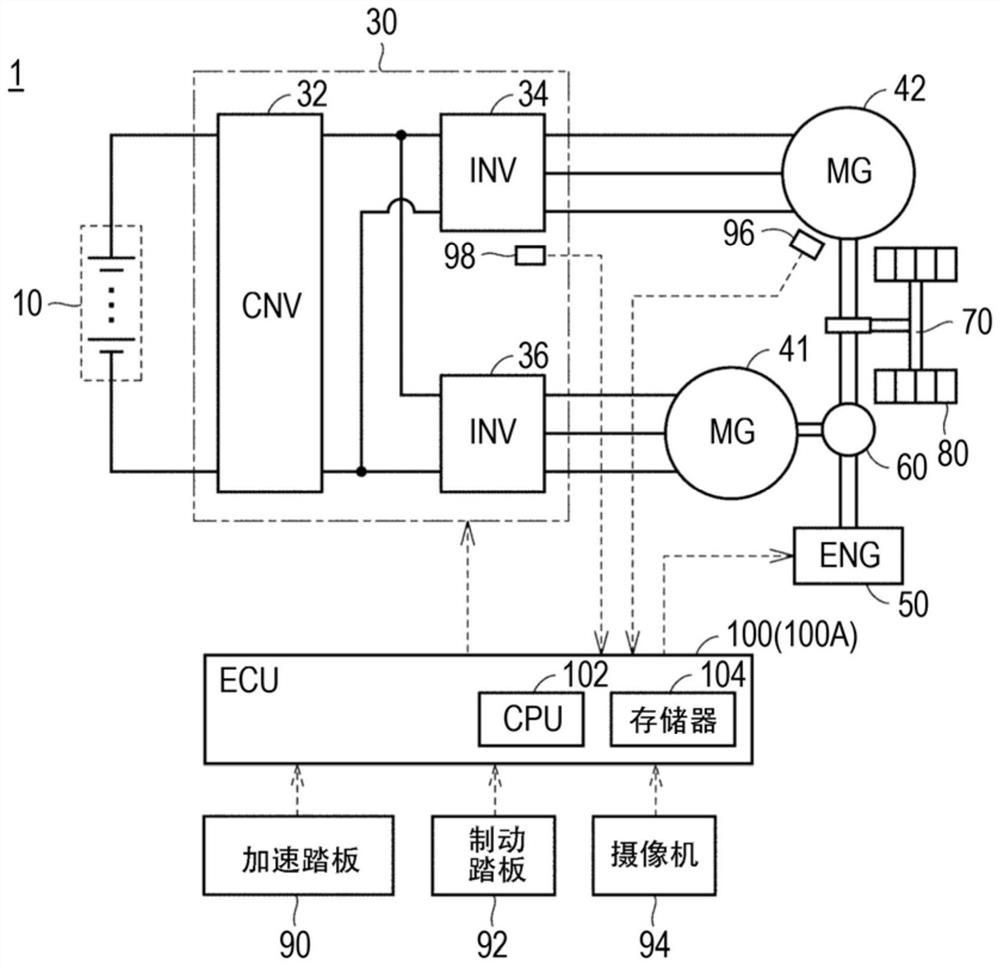
图1是示意性地示出根据本公开的第一实施例的马达驱动的车辆的结构的图;
图2是示出与自动驻车控制相关联的ECU的功能配置的框图;
图3是示出用于行驶的MG的温度与负载限制率之间的关系的图;
图4是示出驱动用于行驶的MG的逆变器的温度与负载限制率之间的关系的图;
图5是示出由ECU执行的处理例程的示例的流程图;
图6是示出自动驻车控制的处理例程的示例的流程图;
图7是示出根据第二实施例的与自动驻车控制相关联的ECU的功能配置的框图;
图8是示出根据第二实施例的由ECU执行的处理例程的示例的流程图;以及
图9是示出根据第二实施例的自动驻车控制的处理例程的示例的流程图。
具体实施例
在下文中,将参考附图详细描述本公开的实施例。在附图中,相同或相应的元件将由相同的附图标记表示,并且将不重复其描述。
第一实施例
图1是示意性地示出根据本公开的第一实施例的马达驱动的车辆的构造的图。在下面的描述中,将描述其中马达驱动的车辆为混合动力车辆的示例,在该混合动力车辆中安装有发动机和行驶用电动机,但是根据本公开的马达驱动的车辆可以为其中未安装发动机的电动车辆。
返回图1,马达驱动的车辆(以下简称为“车辆”)1包括蓄电装置10、电力控制单元(以下称为“PCU”)30、电动发电机(以下称为“MG”)41和42、发动机50、动力分配装置60、驱动轴70和驱动轮80。车辆1还包括加速踏板90、制动踏板92、摄像机94、温度传感器96和98、以及电子控制单元(以下称为“ECU”)100。
蓄电装置10是被配置为可充电的蓄电元件。蓄电装置10包括例如锂离子电池或镍氢电池等二次电池或双电层电容器等蓄电元件。锂离子二次电池是使用锂作为电荷载子的二次电池,并且除了使用液体电解质的普通锂离子二次电池以外,还可以包括使用固体电解质的所谓的全固体电池。
蓄电装置10存储用于驱动MG 41和42的电力,并且可以经由PCU 30向MG 41和42供应电力。蓄电装置10经由PCU 30被供应发电电力,然后,在MG 41和42中发电时,蓄电装置10以供给的电力来充电。
PCU 30包括转换器32以及逆变器34和36。转换器32将供给至逆变器34和36的直流电压升压至等于或大于蓄电装置10的电压。逆变器34和36被设置成与MG 42和41相对应。逆变器34可以以动力运行状态驱动MG 42,并且在车辆1制动时以再生状态驱动MG 42。逆变器36可以以再生状态驱动MG 41,并且在发动机50启动时以动力运行状态驱动MG 41。
MG 41和MG 42是交流旋转电机,并且例如是其中永磁体嵌入转子中的三相交流同步电机。MG 41由逆变器36驱动,并且主要用作由发动机50通过动力分配装置60驱动的发电机。由MG 41产生的电力经由逆变器34和36被供给至MG 42,并且经由逆变器36和转换器32被供给至蓄电装置10。
MG 42由逆变器34驱动,并且主要作为驱动驱动轮80的用于行驶的马达而运转。MG42由来自蓄电装置10的电力和由MG 41产生的电力中的至少一个驱动,MG 42的驱动力被传递至驱动轴70。另一方面,在车辆1制动时,MG 42作为发电机而运转并执行电力的再生。由MG 42产生的电力经由逆变器34和转换器32被供给至蓄电装置10。
发动机50是通过将燃烧空气和燃料的混合物时产生的燃烧能转换成诸如活塞或转子的移动构件的动能而输出动力的内燃机。动力分配装置60包括例如行星齿轮机构,该行星齿轮机构包括三个旋转轴,例如,太阳轮、行星架和齿圈。动力分配装置60将从发动机50输出的动力分成用于驱动MG 41的动力和用于驱动驱动轮80的动力。
加速踏板90由用户(驾驶员)操作以调节车辆1的驱动力。制动踏板92由用户(驾驶员)操作以调节车辆1的制动力。摄像机94是拍摄车辆1的周围环境的图像并且例如在进行自动驻车控制(下文中将描述)时运转的摄像装置。
温度传感器96检测MG 42的温度Tm并将其检测值输出到ECU 100。温度传感器98检测逆变器34的温度Ti并将其检测值输出到ECU 100。尽管未单独示出,但是可以提供检测MG41、逆变器36、转换器32和蓄电装置10的温度的温度传感器。
ECU 100包括中央处理单元(CPU)102、存储器(只读存储器(ROM)和随机存取存储器(RAM))104、以及用于输入和输出各种信号的输入和输出端口(未示出)。ECU 100基于从各种传感器接收到的信号、存储在存储器104中的程序和地图等通过控制发动机50和PCU30来执行对车辆的行驶状态以及蓄电装置10的充电和放电的各种控制。该控制不限于软件中的处理,而是可以通过构造专用硬件(电子电路)来执行。
作为由ECU 100执行的主要控制,ECU 100执行用于计算允许车辆1行驶的要求驱动力并基于计算出的要求驱动力来控制车辆1的驱动力的驱动力控制。
ECU 100基于由摄像机94获取的图像信息执行自动驻车控制,用于自动将车辆1停在目标驻车位置。在根据本实施例的车辆1中,在不依赖于用户的车辆操作(例如,转向操作和加速踏板的操作)的情况下,ECU 100执行用于将车辆1停在目标位置的各种类型的控制(例如,转向控制、驱动力控制和制动控制)。
这里,当在不依赖于如上所述的用户的加速踏板操作的情况下执行自动驻车控制并且在自动驻车控制期间限制了作为用于行驶的马达的MG 42的输出转矩时,由于自动驻车的减速、在坡道上车辆的回滚等,用户的不适感或不安感可能会增加。
因此,在根据第一实施例的车辆1中,当表示可以响应于MG 42的要求转矩而从MG42输出的转矩的限制水平的负载限制率减小时,ECU 100禁止或停止自动驻车控制。自动驻车控制的“禁止”是指当请求自动驻车控制并且负载限制率降低时,不执行(不开始)自动驻车控制。自动驻车控制的“停止”是指在执行自动驻车控制时,当负载限制率降低时,停止自动驻车控制。
当负载限制率减小时,通过禁止或停止自动驻车控制来避免MG 42的输出转矩受到限制而连续执行自动驻车控制的情况。因此,对于车辆1,能够减少用户对于自动驻车控制的不适感或不安感。
图2是示出与自动驻车控制相关联的ECU 100的功能配置的框图。参照图2,ECU100包括用户加速器操作量计算单元110、驱动力控制单元112和自动驻车控制单元114。
用户加速器操作量计算单元110检测用户对加速踏板90的操作量,并基于加速踏板90的操作量来计算控制加速器操作量。在下面的描述中,基于加速踏板90的操作量的控制加速器操作量称为“用户加速器操作量”。
驱动力控制单元112从用户加速器操作量计算单元110接收用户加速器操作量。驱动力控制单元112从自动驻车控制单元114接收指示是否正在执行自动驻车控制的自动驻车控制标志以及在自动驻车控制期间车辆1的要求驱动力。
当自动驻车控制标志被关闭时,即,当不执行自动驻车控制时,驱动力控制单元112基于用户加速器操作量来计算车辆1的要求驱动力,并基于计算出的要求驱动力控制车辆1的驱动力。例如,可以使用表示加速器操作量、车速与要求驱动力等之间的关系的预定映射图,根据用户加速器操作量和车速来计算要求驱动力。
另一方面,当自动驻车控制标志被开启时,即,当正在执行自动驻车控制时,驱动力控制单元112基于从自动驻车控制单元114接收到的要求驱动力来控制车辆1的驱动力。稍后将描述从自动驻车控制单元114接收到的要求驱动力。
驱动力控制单元112基于由温度传感器96检测到的MG 42的温度Tm和由温度传感器98检测到的逆变器34的温度Ti来控制用于行驶的MG 42的负载限制率。具体地,当MG 42的温度Tm大于阈值时,驱动力控制单元112减小MG 42的负载限制率。当逆变器34的温度Ti大于阈值时,驱动力控制单元112还减小MG 42的负载限制率。
负载限制率表示实际上可以从MG 42输出的负载与MG 42所要求的负载的比率。例如,当MG 42或逆变器34的温度上升时,限制MG 42的输出转矩以保护MG 42和逆变器34,并且负载限制率表示可以从MG 42输出的转矩与MG 42所要求的输出转矩(要求转矩)的比率。当降低负载限制率时,MG 42的输出转矩受到限制,因此可以抑制MG 42的温度Tm和逆变器34的温度Ti的增加。
驱动力控制单元112向自动驻车控制单元114输出在由自动驻车控制单元114执行自动驻车控制时的驱动力的可用范围。该驱动力可用范围具体地限定自动驻车控制期间车辆1的驱动力的上限和下限。基于车辆1的驱动系统(例如MG 41和42、发动机50、动力分配装置60和蓄电装置10)的配置,考虑驱动力限制来适当地设定驱动力可用范围。
当请求自动驻车时,自动驻车控制单元114基于由摄像机94获取的图像信息,生成从车辆1的当前位置到目标驻车位置的车辆1的移动路径。例如,通过允许用户触摸未示出的显示器上的自动驻车开始按钮来执行请求自动驻车。移动路径可以是从当前位置到目标驻车位(进入驻车位)的移动路径,或者是从车辆停在其中的驻车位到目标出口位置(从驻车位退出)的移动路径。然后,自动驻车控制单元114执行使车辆1沿着所生成的移动路径移动的各种类型的控制(例如转向控制、驱动力控制和制动控制)。
自动驻车控制单元114将指示是否正在执行自动驻车控制的自动驻车控制标志输出至驱动力控制单元112。自动驻车控制单元114计算用于使车辆1沿着生成的移动路径以目标车速移动的要求驱动力,并将计算出的要求驱动力输出到驱动力控制单元112。
自动驻车控制单元114将计算出的要求驱动力限制为从驱动力控制单元112接收到的驱动力可用范围。具体地,当计算出的要求驱动力大于驱动力可用范围的上限时,要求驱动力被限制为上限,并且当计算出的要求驱动力小于驱动力可用范围的下限时,要求驱动力被限制为下限。
在根据第一实施例的车辆1中,当MG 42的负载限制率降低时,驱动力控制单元112将输出到自动驻车控制单元114的驱动力可用范围设定为0(范围的上限和下限被设定为0)。当从驱动力控制单元112接收到的驱动力可用范围为0时,自动驻车控制单元114基于驱动力可用范围将要求驱动力限制为0。因此,自动驻车控制单元114在正在执行自动驻车控制时停止自动驻车控制并关闭自动驻车控制标志,并且在未执行自动驻车控制而请求自动驻车时禁止自动驻车控制。
当自动驻车控制单元114正在执行自动驻车控制时,如上所述,在不依赖于加速踏板的操作的情况下控制驱动力,并且,自动驻车控制单元114接收来自用户加速器操作量计算单元110的、基于加速踏板90的操作量的用户加速器操作量。当用户加速器操作量随着用户对加速踏板90的操作而变得大于阈值时,自动驻车控制单元114暂时停止自动驻车控制,并且,在未示出的显示器上显示用于允许用户选择是要停止还是要连续执行自动驻车控制的画面。当请求停止自动驻车控制时,自动驻车控制单元114停止自动驻车控制并关闭自动驻车控制标志。
图3是示出用于行驶的MG 42的温度Tm与MG 42的负载限制率之间的关系的图。在图3中,水平轴表示MG 42的温度Tm,垂直轴表示MG 42的负载限制率(%)。当负载限制率为100%时,不执行负载限制(转矩限制),并且随着负载限制率的值减小,对负载(转矩)的限制越大。
参照图3,当温度Tm变得大于Tm1时,负载限制率降低以保护MG 42。当由于温度Tm变得大于Tm2(Tm2>Tm1)而使负载限制率小于阈值Rth1时,驱动力控制单元112将输出到自动驻车控制单元114的驱动力可用范围设定为0。因此,自动驻车控制单元114禁止或停止自动驻车控制。当由于MG 42的温度上升而使MG 42的负载限制率减小时,以这种方式禁止或停止自动驻车控制。
当MG 42的温度上升时,指示MG 42的过热的警告信号可能会在仪表板等中开启。在这种情况下,与阈值Rth1相对应的温度Tm2优选地大于用于开启警告信号的温度阈值。因此,在由于负载限制率小于阈值Rth1而禁止或停止自动驻车控制之前,可以开启警告信号,并且可以通知用户,由于MG 42的过热而禁止或停止自动驻车控制。
图4是示出驱动用于行驶的MG 42的逆变器34的温度Ti与MG 42的负载限制率之间的关系的图。在图4中,水平轴表示逆变器34的温度Ti,垂直轴代表MG 42的负载限制率(%)。
参照图4,当温度Ti大于Ti1时,负载限制率减小以保护逆变器34。当由于温度Ti大于Ti2(Ti2>Ti1)而负载限制率变为小于阈值Rth2时,驱动力控制单元112将输出到自动驻车控制单元114的驱动力可用范围设定为0。因此,自动驻车控制单元114禁止或停止自动驻车控制。以这种方式,当由于逆变器34的温度上升而使MG 42的负载限制率减小时,自动驻车控制也被禁止或停止。
当逆变器34的温度上升时,指示逆变器34过热的警告信号可以在仪表板等中开启。在这种情况下,与阈值Rth2相对应的温度Ti2优选地大于用于开启警告信号的温度阈值。因此,在由于负载限制率小于阈值Rth2而禁止或停止自动驻车控制之前,可以开启警告信号,并且可以通知用户,由于逆变器34的过热而禁止或停止自动驻车控制。
图5是示出由ECU 100执行的处理例程的示例的流程图。以预定周期的间隔重复执行该流程图中示出的一系列处理。
参照图5,ECU 100从温度传感器96获取MG 42的温度Tm(步骤S10)。随后,ECU 100基于所获取的温度Tm来计算负载限制率R1(步骤S15)。例如,使用图3所示的温度Tm与负载限制率之间的关系来计算负载限制率R1。将MG 42的温度Tm与负载限制率之间的关系作为映射图或表预先存储在存储器104中。
随后,ECU 100判定计算出的负载限制率R1是否小于阈值Rth1(步骤S20)。阈值Rth1是用于判定是否由于负载限制率R1的减小而禁止或停止自动驻车控制的设计值,并且根据先前的估计适当地设定。
然后,当判定负载限制率R1小于阈值Rth1时(步骤S20中为“是”),ECU 100基于温度Tm开启自动驻车禁止标志F1(步骤S25)。
另一方面,当在步骤S20中判定负载限制率R1等于或大于阈值Rth1时(步骤S20中为“否”),ECU 100判定负载限制率R1是否大于阈值Rth1+ΔR1(步骤S30)。ΔR1是正值,并且是用于防止当负载限制率R1接近阈值Rth1时重复进行自动驻车控制的禁止(停止)/重新开始的值。
当判定负载限制率R1大于阈值Rth1+ΔR1时(步骤S30中为“是”),ECU 100基于温度Tm关闭自动驻车禁止标志F1(步骤S35)。
与步骤S10至S35的处理并行,ECU 100从温度传感器98获取逆变器34的温度Ti(步骤S40)。随后,ECU 100基于获取的温度Ti来计算负载限制率R2(步骤S45)。例如,使用图4所示的温度Ti与负载限制率之间的关系来计算负载限制率R2。将逆变器34的温度Ti与负载限制率之间的关系预先作为映射表或表存储在存储器104中。
随后,ECU 100确定计算出的负载限制率R2是否小于阈值Rth2(步骤S50)。阈值Rth2是用于确定是否由于负载限制率R2的减小而禁止或停止自动驻车控制的设计值,并且通过先前的估计适当设定。
然后,当判定负载限制率R2小于阈值Rth2时(步骤S50中为“是”),ECU 100基于温度Ti开启自动驻车禁止标志F2(步骤S55)。
另一方面,当在步骤S50中判定负载限制率R2等于或大于阈值Rth2时(步骤S50中为“否”),ECU 100判定负载限制率R2是否大于阈值Rth2+ΔR2(步骤S60)。ΔR2是正值,并且是用于防止当负载限制率R2接近阈值Rth2时重复进行自动驻车控制的禁止(停止)/重新开始的值。
当判定负载限制率R2大于阈值Rth2+ΔR2时(步骤S60中为“是”),ECU 100基于温度Ti来关闭自动驻车禁止标志F2(步骤S65)。
当执行步骤S25、S35、S55和S65的一个处理时,ECU 100判定自动驻车禁止标记F1和F2中的一个是否开启(步骤S70)。当判定自动驻车禁止标志F1和F2中的一个被开启时(步骤S70中为“是”),ECU 100将用于自动驻车控制的驱动力可用范围设定为0(步骤S75)。
当在步骤S70中判定自动驻车禁止标志F1和F2都被关闭时(步骤S70中为“否”),ECU 100不执行步骤S75的处理,并且重新开始处理例程。
图6是示出自动驻车控制的处理例程的示例的流程图。该流程图所示的一系列处理由ECU 100执行,并在用户请求自动驻车时开始。例如,通过允许用户触摸未示出的显示器上的自动驻车开始按钮来执行请求自动驻车。
参照图6,当请求自动驻车时,ECU 100获取用于自动驻车控制的驱动力可用范围(步骤S115)。然后,ECU 100判定驱动力可用范围是否为0(范围的上限和下限均为0)(步骤S120)。当驱动力可用范围为0时(步骤S120中为“是”),ECU 100不执行其后的步骤S125至S165的处理,并且关闭自动驻车控制标志(步骤S170)。即,尽管已经请求了自动驻车,但是自动驻车控制被禁止。
当在步骤S120中判定驱动力可用范围不为0时(步骤S120中为“否”),ECU 100开启自动驻车控制标志(步骤S125)。然后,ECU 100从拍摄目标驻车位置的图像的摄像机94获取拍摄图像的信息(步骤S130)。
随后,ECU 100生成从车辆1的当前位置到目标驻车位置的车辆1的移动路径(步骤S135)。随后,ECU 100再次获取驱动力可用范围(步骤S140)。然后,ECU 100判定驱动力可用范围是否为0(范围的上限和下限均为0)(步骤S145)。当驱动力可用范围为0时(步骤S145中为“是”),ECU 100不执行其后的步骤S150至S165的处理,并且在步骤S170中关闭自动驻车控制标志。即,停止自动驻车控制。
当在步骤S145中判定驱动力可用范围不为0时(步骤S145中为“否”),ECU 100计算车辆1沿着所生成的移动路径移动的目标车速(步骤S150)。ECU 100计算车辆1实现计算出的目标车速的要求驱动力(步骤S155)。例如,可以通过反馈目标车速与实际车速之间的差来计算要求驱动力。然后,ECU 100控制车辆1的转向、驱动力、制动器等,以使车辆1沿着生成的移动路径以目标车速移动(步骤S160)。
在执行自动驻车控制的同时,ECU 100判定是否满足用于结束自动驻车控制的结束条件(步骤S165)。当车辆1到达目标驻车位置时,可以满足这些结束条件。当检测到用户对加速踏板90的操作并且用户从未示出的显示器请求停止自动驻车控制时,也可以满足结束条件。
当在步骤S165中判定未满足结束条件时(步骤S165中为“否”),处理例程返回到步骤S140,并且连续执行自动驻车控制。另一方面,当在步骤S165中判定已满足结束条件时(步骤S165中为“是”),处理例程进行到步骤S170,并且ECU 100结束自动驻车控制并关闭自动驻车控制标志。
如上所述,在第一实施例中,当由于MG 42的温度Tm或逆变器34的温度Ti的上升而使负载限制率变为小于阈值时,禁止或停止自动驻车控制。因此,避免了MG 42的输出转矩受到限制但连续执行自动驻车控制的情况。因此,根据第一实施例,能够减少用户对于自动驻车控制的不适感或不安感。
在第一实施例中,通过将从驱动力控制单元112向自动驻车控制单元114输出的驱动力可用范围设定为0来禁止或停止自动驻车控制。因此,例如,通过在自动驻车控制停止时将驱动力可用范围缓慢地改变到0或者在自动驻车控制重新开始时从0缓慢地改变驱动力可用范围,可以抑制驱动力的快速变化。
第二实施例
在第一实施例中,当MG 42的负载限制率减小时,通过将从驱动力控制单元112输出到自动驻车控制单元114的驱动力可用范围设定为0来禁止或停止自动驻车控制。然而,在第二实施例中,直接从驱动力控制单元112向自动驻车控制单元114请求禁止或停止自动驻车控制。
根据第二实施例的车辆包括ECU 100A,而不是图1中示出的根据第一实施例的车辆1中的ECU 100。
图7是示出根据第二实施例的与自动驻车控制相关联的ECU 100A的功能配置的框图。参照图7,ECU 100A包括用户加速器操作量计算单元120、驱动力控制单元122和自动驻车控制单元124。
用户加速器操作量计算单元120与根据图2所示的第一实施例的用户加速器操作量计算单元110相同。
类似于图2所示的根据第一实施例的驱动力控制单元112,驱动力控制单元122基于由温度传感器96检测到的MG 42的温度Tm和由温度传感器98检测到的逆变器34的温度Ti来控制用于行驶的MG 42的负载限制率。然后,当MG 42的负载限制率减小时,驱动力控制单元122向自动驻车控制单元124输出用于自动驻车控制的禁止请求或停止请求(以下也称为“自动驻车禁止请求”)。驱动力控制单元122的其他配置与根据第一实施例的驱动力控制单元112相同。
当请求自动驻车并且未从驱动力控制单元122接收到自动驻车禁止请求时,自动驻车控制单元124基于由摄像机94获取的图像信息来生成从车辆1的当前位置到目标驻车位置的车辆1的移动路径。然后,自动驻车控制单元124执行用于使车辆1沿着产生的移动路径移动的各种类型的控制(例如转向控制、驱动力控制和制动控制)。
当从驱动力控制单元122接收到自动驻车禁止请求时,自动驻车控制单元124在正在执行自动驻车控制时停止自动驻车控制并关闭自动驻车控制标志,并且在请求了自动驻车但未执行自动驻车控制时禁止自动驻车控制。自动驻车控制单元124的其他配置与根据第一实施例的自动驻车控制单元114相同。
图8是示出根据第二实施例的由ECU 100A执行的处理例程的示例的流程图。该流程图对应于图5所示的流程图。该流程图中示出的一系列处理以预定周期的间隔重复执行。
参照图8,步骤S210至S270的处理与图5所示的步骤S10至S70的处理相同。在第二实施例中,当在步骤S270中判定自动驻车禁止标志F1和F2之一被开启时(步骤S270中为“是”),ECU 100A将自动驻车禁止请求通知给自动驻车控制(步骤S275)。
当在步骤S270中判定自动驻车禁止标志F1和F2都被关闭时(步骤S270中为“否”),ECU 100A不执行步骤S275的处理,并且重新开始处理例程。
图9是示出根据第二实施例的自动驻车控制的处理例程的示例的流程图。该流程图对应于图6所示的流程图。该流程图所示的一系列处理由ECU 100A执行,并且在用户请求自动驻车时开始。
参照图9,当请求自动驻车时,ECU 100A判定是否请求禁止自动驻车(步骤S315)。根据是否从驱动力控制单元122向自动驻车控制单元124输出自动驻车禁止请求来判定是否请求禁止自动驻车。
当判定请求禁止自动驻车时(步骤S315中为“是”),ECU 100A不执行其后的步骤S325至S365的处理,并且关闭自动驻车控制标志(步骤S370)。即,即使已经请求了自动驻车,也禁止自动驻车控制。
当在步骤S315中判定未请求禁止自动驻车时(步骤S315中为“否”),处理例程进行到步骤S325,并且自动驻车控制标记被开启。步骤S325至S335的处理与图6所示的步骤S125至S135的处理相同。
当在步骤S335中生成移动路径时,ECU 100A判定是否请求停止自动驻车(步骤S340)。根据是否从驱动力控制单元122向自动驻车控制单元124输出自动驻车禁止请求来判定是否请求停止自动驻车。
当判定请求停止自动驻车时(步骤S340中为“是”),ECU 100A不执行其后的步骤S350至S365的处理,并在步骤S370中关闭自动驻车控制标志。即,自动驻车控制被停止。
当在步骤S340中判定未请求停止自动驻车时(步骤S340中为“否”),ECU 100A计算车辆1沿着步骤S335中生成的移动路径移动的目标车速(步骤S350)。步骤S350至S365的处理与图6所示的步骤S150至S165的处理相同。
如上所述,在第二实施例中,当由于MG 42的温度Tm或逆变器34的温度Ti的上升而使负载限制率小于阈值时,自动驻车禁止请求从驱动力控制单元122输出到自动驻车控制单元124,并且禁止或停止自动驻车控制。因此,避免了MG 42的输出转矩受到限制但连续执行自动驻车控制的情况。因此,根据第二实施例,也可以减少用户对于自动驻车控制的不适感或不安感。
以上公开的实施例应被认为在所有方面都是示例性的,而不是限制性的。
- 马达驱动装置和搭载该马达驱动装置的车辆
- 马达驱动器及使用该马达驱动器的车辆