一种基于自动驾驶技术的轨路无缝衔接交通方法
文献发布时间:2023-06-19 13:27:45
技术领域
本发明涉及一种新型交通模式,特别涉及一种既能在轨道中实现高速无人驾驶,又能将轨道中的运输工具直接切换到普通路面上,在特定区域内实现低速无人驾驶或有人驾驶的交通模式。
背景技术
交通问题一直困扰着城市建设者,用最低的建设成本和最短的建设周期实现符合城市发展的交通系统是建设者们追求的目标,现有的交通模式都具有一定的局限性,因此,各种新型的交通模式应运而生。
目前,国家在公路交通和轨道交通方面都进行了大量的投入,而轨道交通和公路交通都难以快速实现大运量点对点精准运达,大运量和最后一公里相互制约,成为限制发展的约束条件。随着无人驾驶技术的快速发展,将无人驾驶技术应用于轨道交通和特点区域的路面交通中降低了技术难度,能够快速实现。因此,充分发挥轨道交通干路大运量的和地面交通灵活多变的特点,将两者有机结合的交通模式引起了学者们的关注。
发明内容
本发明的目的在于实现运输工具在轨道交通与路面交通自由切换,满足出发地和目的地点对点一站直达的交通模式,提供了一种在轨道中(干线和支线)高速无人驾驶与在路面(灵活度高)低速无人驾驶或有人驾驶相结合的交通模式。在该模式中,运输工具小巧灵便,具备无人驾驶和有人驾驶功能,通过轨道将乘客或者货物运输到相应站点,运输工具在站点中完成行驶道路轨道和路面的切换,运输工具在路面上行驶将乘客或者货物运达目的地后返回轨道,有效实现低成本高运量点对点运输。
本发明采用的技术方案为一种基于自动驾驶技术的轨路无缝衔接交通方法,实现该方法的系统包含轨道系统、路面系统和运输工具。轨道系统和路面系统相互连接,运输工具能够沿轨道系统和路面系统运行。
轨道系统包含干线轨道和支线轨道,通过规划出发地与目的地行驶路径,以距离目的地最近为优化目标进行目的地周边站点寻优,通过高速无人驾驶将乘客或货物运输到相应站点,各站点具备运输工具在轨道系统的轨上行驶和路面系统的路面行驶的相互切换,运输工具到达路面后根据实际需求通过低速无人驾驶或有人驾驶将乘客或者货物运到目的地。乘客或货物到达目的地后运输工具会自动返回轨道系统中运行。
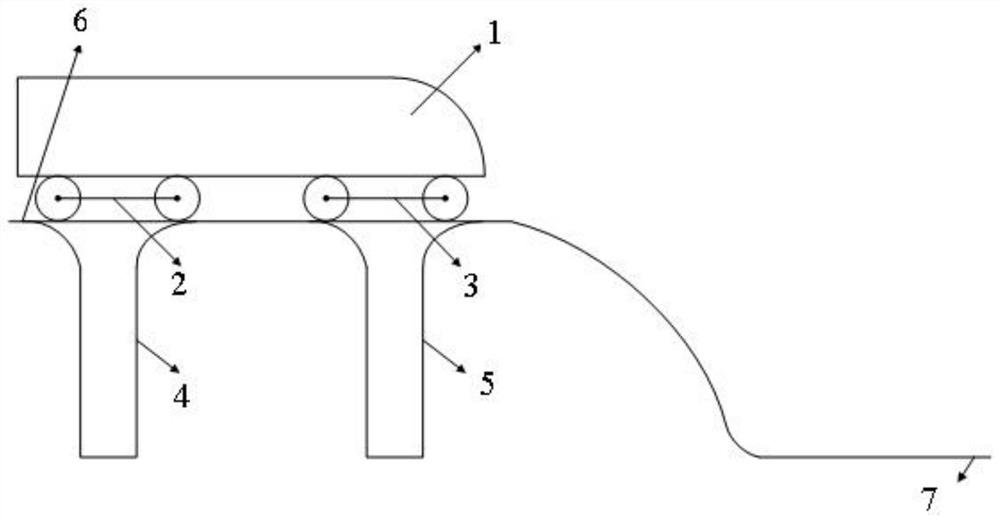
运输工具包含运输工具轿厢1、运输工具转向架一2、运输工具转向架二3。运输工具轿厢1的底部设有运输工具转向架一2和运输工具转向架二3。运输工具转向架一2和运输工具转向架二3能够沿轨道系统或路面系统进行运输切换。
轨道系统包含轨道立柱一4、轨道立柱二5、轨道6。轨道系统架设于空中,分为干线和支线;所述轨道6由轨道立柱一4和轨道立柱二5支撑。
轨道系统与路面系统的普通路面7连接。
里面包含了三种情况(1)区域人口稠密、(2)区域人口分布不均匀、(3)区域人口稀疏。区域人口稠密时,将区域网状划分,划份区域密集程度根据人口稠密程度适当调整,在线路交叉节点处设置站点,以满足运输需求;网格划分线路上铺设轨道;区域人口分布不均匀时,根据交通运量需求调整轨道铺设和站点分布;区域人口较为稀疏时,通过高速无人驾驶在轨道系统中将乘客或货物送至距离目的地最近的站点,运输工具到达站点后自动从轨道切换到路面上,在路面上通过低速无人驾驶或者有人驾驶到达目的地,乘客或货物到达后,运输工具自动返回站点并从路面切换到轨道中继续运行。
附图说明
图1运输工具轨上与路面切换示意图。
图2为人口稠密,人员流动性大交通模式示意图。
图3为人口分布不均匀,按需分配资源交通模式示意图。
图4为人口稀疏,以低成本实现系统功能交通模式示意图。
图1标记:1-运输工具轿厢,2-运输工具转向架一,3-运输工具转向架二,4-轨道立柱一,5-轨道立柱二,6-轨道,7-普通路面。
图2标记:点划线进行区域划分,点划线内为内部区域,点划线外为外部区域,A1-站点A1,A2-站点A2,A3-站点A3,A4-站点A4;B1-站点B1,B2-站点B2,B3-站点B3,B4-站点B4;C1-站点C1,C2-站点C2,C3-站点C3,C4-站点C4;D1-站点D1,D2-站点D2,D3-站点D3,D4-站点D4。
图3标记:点划线进行区域划分,点划线内为内部区域,点划线外为外部区域,E1-站点E1,E2-站点E2;F1-站点F1;G1-站点G1,G2-站点G2,G3-站点G3,G4-站点G4;H1-站点H1,H2-站点H2,H3-站点H3,H4-站点H4。
图4标记:点划线进行区域划分,点划线内为内部区域,点划线外为外部区域,I1-站点I1,I2-站点I2;J1-站点J1;K1-站点K1,K2-站点K2。
具体实施方式
下面结合附图及具体实施方式作进一步的详细描述。但不应将此理解为本发明上述主题的范围仅限于以下的实施方式,凡基于本发明内容所实现的技术均属于本发明的范围。
此系统由轨道系统、路面系统和运输工具构成,轨道系统分为干线轨道和支线轨道,干线轨道以运达恰当区域为目的,支线轨道以运达恰当站点为目的,通过优化出发地和目的地间的运输路径,规划实现运输工具到达距离目的地最近的站点。到达站点后,运输工具将在站点中进行切换(从轨道中行驶变成在路面中行驶),运输工具具有低速无人驾驶和有人驾驶功能,满足乘客或货物在路面上解决从站点到目的地的需求。运输工具将乘客或货物安全送到目的地后通过低速无人驾驶返回站点,通过站点进行状态切换(从路面上行驶切换回轨道中),回到轨道中运行。
运输工具轨上与路面切换如图1。运输工具主要由1-运输工具轿厢、2-运输工具转向架一和3-运输工具转向架二构成,轨道通过立柱进行支撑(图中只示意了立柱1和立柱2),运输工具在站点中通过轨道的圆弧曲线完成轨道和路面的相互切换。
人口稠密,人员流动性大交通模式如图2所示,因为人口稠密,需要将区域网格化划份,设置足够多的站点满足运输需求。图2中外部区域实线为干线轨道,内部区域实线及虚线为支线轨道,黑色圆圈位置为站点位置(A1\A2\A3\A4\B1\B2\B3\B4\C1\C2\C3\C4\D1\D2\D3\D4等)。通过高速无人驾驶技术在轨道中将乘客或货物送至距离目的地最近的站点,运输工具到达站点后自动从轨道切换到路面上,在路面上通过低速无人驾驶或者有人驾驶到达目的地。乘客或货物到达后,运输工具自动返回站点并从路面切换到轨道中继续运行。
人口分布不均匀,按需分配资源交通模式如图3所示,因为人口分布不均匀,需要按照交通运量的需求进行区域划份,在人口密集交通需求大的地方多设置站点,在人口稀疏交通需求不大的地方少设站点,降低成本。图3中外部区域实线为干线轨道,内部区域实线为支线轨道,黑色圆圈为站点(E1\E2\F1\G1\G2\G3\G4\H1\H2\H3\H4)。在运行过程中,同样通过高速无人驾驶技术在轨道中将乘客或货物送至距离目的地最近的站点,运输工具到达站点后自动从轨道切换到路面上,在路面上通过低速无人驾驶或者有人驾驶到达目的地。乘客或货物到达后,运输工具自动返回站点并从路面切换到轨道中继续运行。
人口稀疏,以低成本实现系统功能交通模式如图4所示,因为人口稀疏,站点需求较少,为降低成本,需要规划恰当的站点位置以保证系统运行的可达性。图4中外部区域实线为干线轨道,内部区域实线为支线轨道,黑色圆圈为站点(I1\I2\J1\K1\K2)。而在运行过程中,与前两种模式相同,通过高速无人驾驶技术在轨道中将乘客或货物送至距离目的地最近的站点,运输工具到达站点后自动从轨道切换到路面上,在路面上通过低速无人驾驶或者有人驾驶到达目的地。乘客或货物到达后,运输工具自动返回站点并从路面切换到轨道中继续运行。
通过使用新的基于实际路况的新型轨路两用交通模式可以实现乘客从出发地到目的地的高效出行,实现了轨道交通和路面交通的无缝衔接,有效的提高通行效率。
对所公开实施案例的上述说明,使本领域专业技术人员能够实现或使用本发明,对本实施案例的多种修改对本领域的专业技术人员来说是显而易见的。本文中所定义的一般原理可以在不脱离本发明的精神或范围的情况下,在其它实施案例中体现。因此,本发明将不会被限制于本文所示的实施案例,而是要求符合本文所公开的原理和新颖性特点相一致的最宽的范围。
- 一种基于自动驾驶技术的轨路无缝衔接交通方法
- 基于自动驾驶技术的道路交通稽查方法和车辆