一种基于自动驾驶的轨路两用运输工具
文献发布时间:2023-06-19 13:27:45
技术领域
本发明涉及一种新型轨路两用运输工具,特别涉及一种既能实现在轨道中高速自动驾驶,又能在固定区域普通路面上低速自动或者人工驾驶的运输工具。
背景技术
高铁技术近年来高速发展,能够满足城市间高速运输的需求,地铁技术的应用在解决城市拥堵问题上起到了较大作用。这两种技术都属于轨道交通,具有运输速度快,拥有独立路权的优势,但是难以解决从出发地到目的地的精准运达的问题,也就是最后一公里的问题。
汽车具有灵活多变的特点,但是随着城市中汽车保有量的大幅度提升,拥堵问题随之而来,汽车作为运输工具受到拥堵问题的困扰,城市道路规划者也正在积极寻找新的方案。
大范围应用自动驾驶技术具有较高的难度,还受到伦理道德方面的约束,因此将自动驾驶技术应用于独立路权的轨道交通是一种新的思路,同时,在固定区域、固定道路场景内提升低速自动驾驶技术的应用量也成为可能。
因此,发明一种新的交通工具,具有在轨道中自动驾驶高速运行,到达固定区域后自动驾驶低速运行,实现点对点的高效运输。
发明内容
本发明的目的是构建一种运输工具结构,此工具结合自动驾驶技术,既能够在轨道中高速行驶,又能在普通路面上低速行驶,实现乘客或货物的点对点运输。
本发明采用的技术方案为一种基于自动驾驶的轨路两用运输工具,包含第一转向架1、第二转向架2和轿厢3,依靠自动驾驶技术进行驱动实现。第一转向架1和第二转向架2以弹簧阻尼的方式分别连接于轿厢3下方的前部和后部。第一转向架1中包含了具有行驶和差速功能的结构:第一轮毂电机驱动轮8、第二轮毂电机驱动轮9、第三轮毂电机驱动轮10、第四轮毂电机驱动轮11,以及制动系统结构的第一转向架制动系统16;第二转向架中包含具有行驶和差速功能结构:第五轮毂电机驱动轮12、第六轮毂电机驱动轮13、第七轮毂电机驱动轮14、第八轮毂电机驱动轮15以及制动系统结构的第二转向架制动系统17。轿厢3中包含具有转向功能机构第一转向机构左4、第二转向机构左5、第一转向机构右6、第二转向机构右7。
本发明所行驶的轨道是地下铺设、路面铺设或是空中架设,运输工具在轨道中实现转向或者变道时需要轨道具有相应结构进行配合。运输工具动力性能良好,满足轨道与普通路面间通过坡道进行切换。轨道配合结构包含:左转变道轨19,右转变道轨20。
四个转向机构都位于轿厢的两侧,以铰链的方式连接,第一转向机构左4和第二转向机构左5分别位于轿厢的左前侧和左后侧,第一转向机构右5和第二转向机构右6分别位于轿厢的右前侧和右后侧;第一转向架1和第二转向架2都位于轿厢的下方,以两个悬挂系统连接于轿厢上,第一转向架1位于轿厢下方的前部,第二转向架2位于轿厢下方的后部。
运输工具全部动作依靠自动驾驶技术实现,其轿厢3通过第一悬挂系统21和第二悬挂系统22与第一转向架1、第二连接。转向架中的八个轮毂电机驱动轮具有驱动和行驶功能,同时八个轮毂电机在行驶过程中具有差速功能,满足弯道行驶过程中的速度差;每个转向架的制动系统采用盘式制动器结构,整个制动系统位于转向架中部;轿厢包含四个转向机构,四个转向机构分布在轿厢侧面中部位置,左侧两个,轿厢右侧两个,通过调整转向机构的位置形态与轨道相配合来实现运输工具在轨道中的转弯、变道功能,图3的(a)为运输工具在轨道中直线行驶;图3的(b)为运输工具左侧两转向机构处于竖直向下状态,配合轨道上的左转轨,即可实现左转或者向左变道;图3的(c)为运输工具右侧两转向机构处于竖直向下状态,配合轨道上的右转轨,即可实现右转或者向右变道;运输工具在固定区域普通路面中,通过轮毂电机驱动轮驱动,通过制动系统实现加减速功能,转弯、变道功能通过轮毂电机差速实现。
附图说明
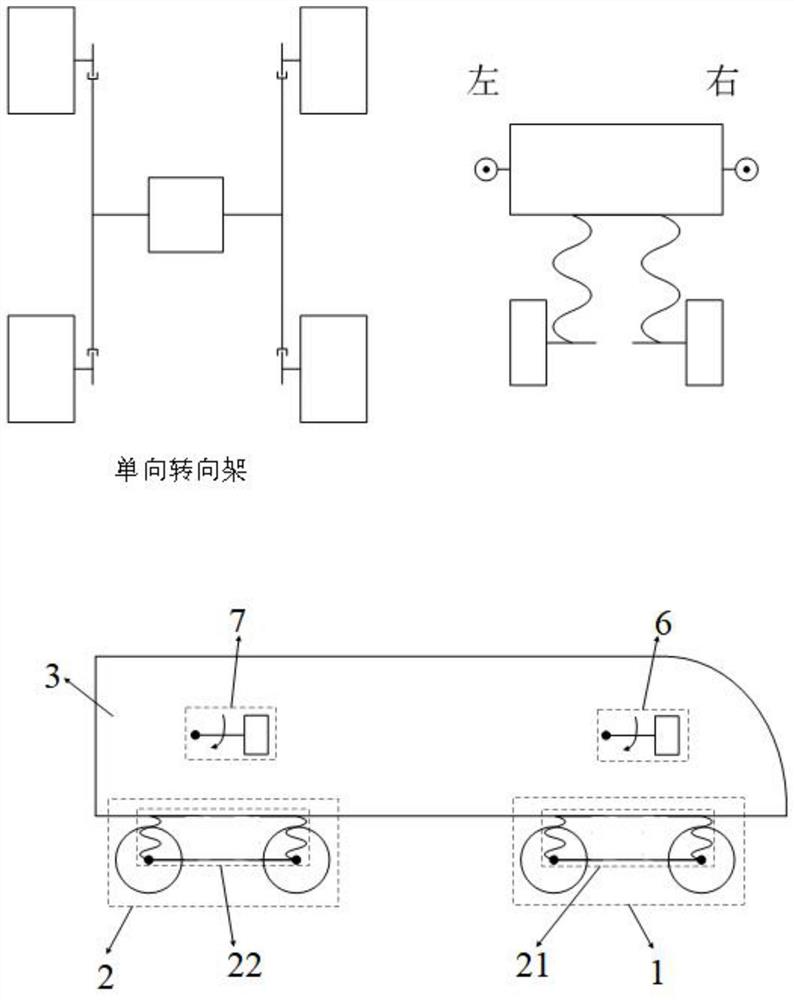
图1为轨路两用运输工具侧视图。
图2为轨路两用运输工具俯视图。
图3为轨路两用运输工具轨上运行状态切换图。
图1标记:1-第一转向架,2-第二转向架和3-轿厢,6-第一转向机构右和7-第二转向机构右,21-第一悬挂系统和22-第二悬挂系统。
图2标记:4-第一转向机构左,5-第二转向机构左,6-第一转向机构右,7-第二转向机构右,8-第一轮毂电机驱动轮,9-第二轮毂电机驱动轮,10-第三轮毂电机驱动轮,11-第四轮毂电机驱动轮,12-第五轮毂电机驱动轮,13-第六轮毂电机驱动轮,14-第七轮毂电机驱动轮,15-第八轮毂电机驱动轮,16-第一转向架制动系统,17-第二转向架制动系统。
图3标记:18-直行轨道,19-左转变道轨,20-右转变道轨。
具体实施方式
下面结合附图及具体实施方式作进一步的详细描述。但不应将此理解为本发明上述主题的范围仅限于以下的实施方式,凡基于本发明内容所实现的技术均属于本发明的范围。
此运输工具由第一转向架、第二转向架和轿厢构成,运输工具具有在轨道中高速自动行驶和固定区域路面低速自动行驶的功能,驱动、行驶、转向、制动等动作的实现均配合自动驾驶技术实现。
轿厢通过悬挂系统安装在两个转向架上,两个转向架中的八个轮毂电机驱动轮具有驱动和行驶功能,同时八个轮毂电机在行驶过程中具有差速功能,满足弯道行驶过程中的速度差;每个转向架的制动系统采用盘式制动器结构,整个制动系统位于转向架中部;轿厢包含四个转向机构,四个转向机构的分布在轿厢侧面中部位置,左侧两个,轿厢右侧两个,通过调整转向机构的位置形态与轨道相配合来实现运输工具在轨道中的转弯、变道功能;在普通路面中的转弯、变道功能通过轮毂电机差速实现。
此运输工具所行驶的轨道既可以是地下铺设、路面铺设,也可以是空中架设,运输工具在轨道中实现转向或者变道时需要轨道做相应处理配合。运输工具动力性能良好,满足轨道与普通路面间通过坡道进行切换。轨道配合结构包含:19-左转变道轨,20-右转变道轨。
如图3的(a)所示,运输工具在轨道中直线行驶,轮毂电机驱动轮驱动运输工具,制动系统实现运输工具加减速,此时轮毂电机驱动轮差速控制起到较小或者不起作用,轿厢上的转向机构处于水平状态,不起转向或者变道作用,轨道上也没有相应机构匹配。运输工具可以实现高速自动行驶。
如图3的(b)所示,运输工具在轨道中需要左转或者向左变道行驶,轮毂电机驱动轮驱动运输工具,制动系统实现运输工具加减速,此时轿厢上的左侧转向机构处于竖直向下状态,右侧转向机构处于水平状态,配合轨道中的左转轨进行转向或者变道,轮毂电机驱动轮差速控制起到差速作用。运输工具可以通过自动控制转向机构动作和轮毂电机驱动轮差速实现轨道中的左转和向左变道。
如图3(c)所示,运输工具在轨道中需要右转或者向右变道行驶,轮毂电机驱动轮驱动运输工具,制动系统实现运输工具加减速,此时轿厢上的右侧转向机构处于竖直向下状态,左侧转向机构处于水平状态,配合轨道中的右转轨进行转向或者变道,轮毂电机驱动轮差速控制起到差速作用。运输工具可以通过自动控制转向机构动作和轮毂电机驱动轮差速实现轨道中的右转和向右变道。
运输工具还可以在固定区域普通路面上行驶,通过轮毂电机驱动轮驱动,通过制动系统实现加减速功能,转弯、变道功能通过轮毂电机差速实现。
通过新型轨路两用运输工具可以实现乘客从出发地到目的地的高效出行,实现了轨道交通和路面交通的无缝衔接,有效的提高通行效率。
对所公开实施案例的上述说明,使本领域专业技术人员能够实现或使用本发明,对本实施案例的多种修改对本领域的专业技术人员来说是显而易见的。本文中所定义的一般原理可以在不脱离本发明的精神或范围的情况下,在其它实施案例中体现。因此,本发明将不会被限制于本文所示的实施案例,而是要求符合本文所公开的原理和新颖性特点相一致的最宽的范围。
- 一种基于自动驾驶的轨路两用运输工具
- 一种基于自动驾驶技术的轨路无缝衔接交通方法