应用于PCB板生产的翻转下料装置
文献发布时间:2023-06-19 18:25:54
技术领域
本申请涉及PCB板生产领域,尤其是涉及一种应用于PCB板生产的翻转下料装置。
背景技术
PCB板,即印制PCB板,又称印刷线路板,是重要的电子部件,是电子元器件的支撑体,是电子元器件电气相互连接的载体。由于它是采用电子印刷术制作的,故被称为“印刷”PCB板。在PCB板垂直涂布生产过程中,水平进料后需要将PBC板进行转换成竖直方向,便于后续的夹取涂布操作。下料时则需要将竖直方向的板材转换成水平方向,以进入下一个工序。
现有公开号为CN216004287U的中国专利“PCB板自动翻转机”,其通过公开包括机架、通过升降装置连接于机架的翻转机构,以及连接于翻转机构用于捕获PCB板的抓取装置,抓取装置包括设置于翻转机构相背两面均匀分布的第一真空吸盘,机架设置从上料位置输送PCB板至翻转机构上的输送装置。第一真空吸盘均匀分布,便于均匀吸附PCB板,在翻转机构上升、下降以及翻转时PCB板均匀受到吸力更加稳定,避免晃动变形,第一真空吸盘分布在翻转机构相背的两面,提高了工作效率。
现有公开号为CN217102028U的中国专利“一种PCB板自动翻板装置”,其通过公开包括底座,底座顶端一侧设置翻板机构,翻板机构一侧设置有输送机构,翻板机构包括升降架、托板、夹取机构,升降架与所述底座螺纹连接,托板固定设置在升降架上方,夹取机构设置在托板的上端,夹取机构包括夹爪、伸缩杆和旋转杆,旋转杆与托板螺纹连接,伸缩杆设置在旋转杆一侧,伸缩杆另一侧与夹爪固定连接。本发明自动化程度高,操作简单,不仅降低了操作人员劳动强度,提高了生产效率,同时无需操作人员接触PCB板,既能对PCB板进行翻转,保持PCB板干净整洁。
针对上述相关技术,存在着吸盘虽然稳定但容易在PCB板上留下吸痕,夹爪虽然能够保持PCB板的整洁但容易造成PCB晃动变形,因此急需一种即能够减少PCB板上的吸痕,又能加强PCB在翻转过程中的稳定性的翻转装置。
发明内容
为了使得PCB板生产过程中即能够减少PCB板上的吸痕,又能加强PCB在翻转过程中的稳定性,本申请提供一种应用于PCB板生产的翻转下料装置。
本申请提供的一种应用于PCB板生产的翻转下料装置采用如下的技术方案:
一种应用于PCB板生产的翻转下料装置,包括:
固定座,所述固定座上设置有收料臂;
翻转驱动组件,包括固定架、转动杆和驱动电机,所述驱动电机固定在所述固定架上,所述转动杆的一端固定连接在所述驱动电机的驱动轴上,所述转动杆的另一端固定连接所述固定座以携带收料臂在竖直方向及水平方向的翻转;以及
收料夹爪组件,至少设置有两组,每组所述收料夹爪组件包括第一夹持臂以及第二夹持臂,第一夹持臂与固定座固定且位于收料臂的一端,所述第一夹持臂伸出于所述固定座之外,所述第一夹持臂的末端向远离所述收料臂的一端延伸有间隔设置的两个连接臂,两个连接臂之间设置有连接杆,所述第二夹持臂包括固定于所述第一夹持臂的底部的铰支座、与铰支座连接的伸缩结构、以及夹爪,夹爪与伸缩结构及转轴转动连接且具有自由端,所述伸缩结构伸长时能驱动夹爪运动以便夹爪的自由端与第一夹持臂配合用于PCB板的夹取以及收缩时用于PCB板的放料。
通过采用上述技术方案,在对PCB板进行下料操作的过程中,收料臂一开始处于竖直状态,此时启动收料夹爪组件的伸缩结构,伸缩结构推动夹爪将垂直向的PCB板夹持住,夹持住PCB板后,翻转驱动机构的驱动电机开始工作,驱动电机的驱动轴进行90°的翻转,驱动轴90°翻转带动着固定连接在驱动轴上的转动杆进行90°翻转,转动杆的另一端连接在收料臂的固定座上,收料臂的另一端连接着夹持住PCB板的收料夹爪组件,从而使得PCB板由竖直方向转化成水平方向,PCB板变成水平方向后,伸缩结构往回推动,使夹爪收回,进而使得PCB板能够顺利进入到出料设备中。与现有的使用吸盘对PCB板的板面进行吸附相比较,本申请使用的收料臂、收料夹爪组件以及翻转驱动组件的配和,能够有效地减小现有技术中通过吸盘吸附PCB板,在PCB板上留下吸痕,影响PCB板的美观甚至造成PCB板损坏的可能。
可选的,所述收料臂设置有两个,所述收料臂位纵长的块状结构,两个所述收料臂平行间隔设置,所述收料臂与两个所述收料夹爪组件一一对应,两个所述收料夹爪组件的末端距离固定架的距离相等。
通过采用上述技术方案,一组收料夹爪组件虽然也能够实现对PCB板的夹持,但是相较于一组收料夹爪组件,两组收料夹爪组件的对PCB板的夹持更加稳定,能够有效减小对PCB板进行翻转时,PCB板发生侧翻的可能。
可选的,所述驱动电机的外壳设置有滑移槽,所述固定架上固定连接有滑轨,所述驱动电机上转动连接有升降螺杆,所述升降螺杆通过电机驱动。
通过采用上述技术方案,针对悬挂高度较高的PCB板,需要将收料夹爪组件抬升才能对PCB板的边缘进行夹持;针对悬挂高度较低的PCB板,需要适当降低收料夹爪组件才能对PCB板的边缘进行夹持,进而使得收料夹爪组件能够适用于不同悬挂高度的PCB板。
可选的,所述转动杆设置有两个,两个所述转动杆中的一个固定连接在所述驱动电机的驱动轴上,两个所述转动杆中的另一个滑动连接在所述驱动电机的驱动轴上。
通过采用上述技术方案,针对规格较宽的PCB板,需要将滑动连接于电机的驱动轴上的转动杆向远离固定在电机驱动轴上的另一个转动杆的方向移动;针对规格较窄的PCB板,需要将滑动连接于电机的驱动轴上的转动杆向固定在电机驱动轴上的另一个转动的方向移动,从而使得收料夹爪组件能够适用于不同宽度规格的PCB板。
可选的,两个所述转动杆之间设置有调节套杆和调节套管,所述调节套杆固定连接于一个转动杆上,所述调节套管固定连接于另一个转动杆上,所述调节套杆套设在所述调节套管上,所述调节套管上设置有定位传感器,所述定位传感器用于对PCB板进行定位测量。
通过采用上述技术方案,当定位传感器接受到了PCB板的距离信号后,调节套管和调节套杆,对调节套管进行精确调节,从而使得两个转动杆实现以PCB板中轴线对称设置,进而使得收料夹爪组件对PCB板的夹持更加紧密。
可选的,所述伸缩结构与所述夹爪之间设置有Y型轴接。
通过采用上述技术方案,Y型轴接的方式使得收料夹爪组件对PCB板的夹持更加顺畅与稳定。
可选的,还包括支撑组件,所述支撑组件包括第一伞齿轮、第二伞齿轮、升降杆和移动支撑平台,所述第一伞齿轮套设在所述驱动电机的输出轴外,所述第二伞齿轮位于所述第一伞齿轮的上方,所述第一伞齿轮与所述第二伞齿轮啮合,所述升降杆轴向穿设于所述第二伞齿轮,所述移动支撑平台位于所述升降杆远离所述第二伞齿轮的一端,所述转动杆靠近所述移动支撑平台的一端开设有限位凹槽,所述移动支撑平台上设置有限位块,所述限位块在所述限位凹槽内滑动。
通过采用上述技术方案,在PCB板进行下料的过程中,收料夹爪组件将PCB板的一端夹持住并通过翻转驱动组件进行90°的翻转,这个过程中,如果PCB板的长度过长,或者是翻转过程太快,容易使得PCB板未被夹持的一端发生变形,进而影响生产出来的PCB板的质量。支撑组件的设置,使得当被夹持的PCB板要进行翻转前,PCB板未被夹持的一面会与支撑平台进行抵接,当PCB板旋转的过程中,驱动电机输出轴外套设的第一伞齿轮随着驱动电机的转动发生转动,此时第一伞齿轮带动着第二伞齿轮进行转动,第二伞齿轮旋转带动升降杆向远离第二伞齿轮的方向移动,升降杆的移动带动着支撑平台在限位凹槽内发生移动,进而实现对PCB板的夹持,减小了PCB板在翻转过程中发生变形的可能,从而达到了加强PCB在翻转过程中的稳定性的效果。
可选的,所述移动支撑平台上均设置有弹性抵接层。
通过采用上述技术方案,PCB板是硬质材料,如果直接与硬质的移动支撑平台进行抵接,PCB板是有可能被破坏的,因此在移动支撑平台上设置弹性抵接层,使得PCB板远离夹爪的一端也能够被有效支撑限位即可。
可选的,所述移动支撑平台为伸缩盒状,所述移动支撑平台的侧壁固定连接有距离传感器,所述移动支撑平台内设置有电动伸缩推杆,所述电动伸缩推杆通过所述距离传感器的信号来升降所述移动支撑平台的。
通过采用上述技术方案,PCB板生产线生产的PCB板不会是一成不变的,经常会有尺寸的变化,当生产线更换了PCB板的长度规格时,移动支撑平台上的距离传感器会通过判断垂直方向上的PCB板的下边缘距离移动支撑平台的距离,将信号传输至电动伸缩杆,从而实现移动支撑平台高度的调节,进而使得支撑组件能够适用于不同规格的PCB板。
可选的,所述固定座上固定连接有若干插接杆,所述收料臂上开设有若干插接孔,若干所述插接杆与若干所述插接孔一一对应。
通过采用上述技术方案,插接杆插接在插接孔中时,插接杆与插接孔过盈配合,当需要对收料夹爪组件进行维修更换时,只需将插接杆从插接孔中拔出即可进行维修与更换。
综上所述,本申请包括以下至少一种有益技术效果:
1.通过收料臂、收料夹爪组件以及翻转驱动组件的设置,使得PCB板在下料的过程中,使用收料夹爪组件对PCB板的边缘进行夹持,被夹持的PCB板通过翻转驱动组件带动收料臂和收料夹爪组件进行90°的翻转,与现有技术相比较,有效地减小现有技术中通过吸盘吸附PCB板,在PCB板上留下吸痕,影响PCB板的美观甚至造成PCB板损坏的可能;
2.通过支撑组件的设置,使得PCB板在下料的过程中,因为移动支撑平台的设置,使得支撑平台对PCB板对远离夹爪的一端提供一定的支撑力,进而减小了长度过长的PCB板或者翻转过程过快时,PCB板发生变形的可能,从而达到了加强PCB在翻转过程中的稳定性的效果;
3.通过将收料臂设置有两个,收料夹爪组件设置有两组,使得收料夹爪组件对PCB板顶部的夹持更加稳定,进而使得整个PCB板生产的翻转下料装置运转更加稳定。
附图说明
图1是本申请实施例1中应用于PCB板生产的翻转下料装置的整体结构示意图。
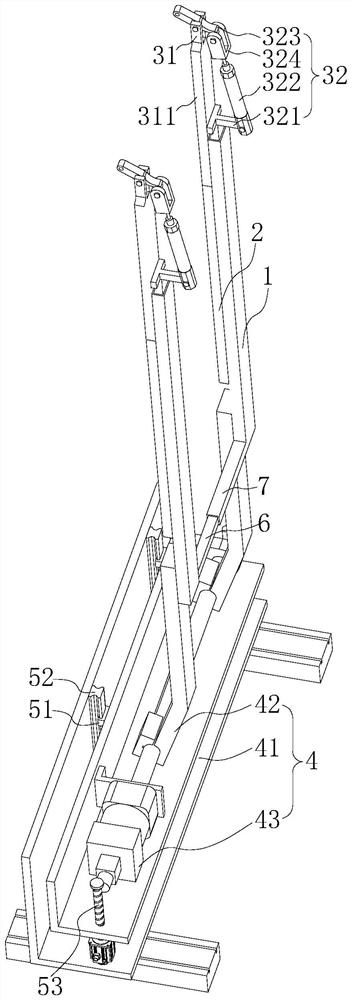
图2是本申请实施例1中应用于PCB板生产的翻转下料装置的另一视角的整体结构示意图。
图3是图2中A区域的局部放大图。
图4是本申请实施例2的整体结构示意图。
图5是图4的正视图。
图6是图4的侧视图。
图7是图6的A-A剖面图。
图8是图6的B-B剖面图。
附图标记说明:
1、固定座;2、收料臂;3、收料夹爪组件;31、第一夹持臂;311、连接臂;32、第二夹持臂;321、铰支座;322、伸缩结构;323、夹爪;324、Y型轴接;4、翻转驱动组件;41、固定架;42、转动杆;43、驱动电机;51、滑移槽;52、滑轨;53、升降螺杆;6、调节套杆;7、调节套管;8、支撑组件;81、第一伞齿轮;82、第二伞齿轮;83、升降杆;84、移动支撑平台;9、限位凹槽;10、限位块;11、电动伸缩推杆;12、插接杆;13、移动凹槽;14、移动块。
具体实施方式
以下结合附图1-7对本申请作进一步详细说明。
本申请实施例公开一种应用于PCB板生产的翻转下料装置。
需要说明的是,在本发明的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“端部”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。同时,在本发明的描述中,除非另有说明,“多个”的含义是两个或两个以上。
为了便于理解,对PCB板整个生产过程中的涂布过程做简要说明如下:PCB板在生产过程中,先将PCB板水平传送至涂布操作系统,对PCB板进行涂布的过程中,需要将PCB板转化成竖直状态进行涂布操作,涂布操作完毕后,需要通过下料组件,将竖直状态的PCB板转化成水平状态进行下料,下料后再通过水平出料装置进行出料,本申请主要描述的即是一种应用于PCB板生产的翻转下料装置。
实施例1
参照图1,应用于PCB板生产的翻转下料装置包括收料臂2、收料夹爪组件3和翻转驱动组件4。当PCB板涂料完毕后,需要有竖直状态转化成水平状态,此时翻转驱动组件4驱动收料臂2由水平状态90°旋转成竖直状态,收料臂2旋转成竖直状态后,收料夹爪组件3的夹爪323由收紧状态切换为展开状态,当收料臂2接触到PCB板时,夹爪323由展开状态切换为收紧状态,此时夹爪323夹住PCB板的边缘,翻转驱动机构再次驱动收料臂2由竖直状态90°旋转成水平状态,PCB板转化成水平状态后,收料夹爪组件3的夹爪323再次由收紧状态切换为展开状态,此时PCB板位于出料装置上,出料装置将PCB板出料传出,与现有技术相比较,夹爪323只需要抓取PCB板的边缘即可对PCB板进行翻转,不需要使用大量的吸盘去对PCB板内部进行吸附,进而减小了PCB板容易留下吸痕的可能。
参照图2,收料臂2的主要功能为承接生产下料过程中的PCB板,收料臂2的一端为固定座1,PCB板下料过程由竖直状态翻转成水平状态,首先翻转过程中,收料臂2有效地防止了PCB板在任意方向上旋转,减小了PCB板发生变形的可能,其次水平状态的PCB板受到收料臂2的支撑,然后再被出料装置的传送带传输走,从而完成出料工作。
参照图2,收料夹爪组件3包括第一夹持臂31和第二夹持臂32,第一夹持臂31包括两个连接臂311以及连接杆;第二夹持臂32包括铰支座321、伸缩结构322、Y型轴接324和夹爪323,铰支座321转动连接在收料臂2上,铰支座321、伸缩结构322、Y型轴接324和夹爪323依次连接并同时设置在收料臂2远离固定座1一端的端部。当需要对PCB板进行夹持时,伸缩结构322推动Y型轴接324,Y型轴接324发生转动,转动的Y型轴接324对夹爪323推动,从而实现对PCB板的夹持。当对PCB板下料完毕要对PCB板进行出料时,伸缩结构322拉回Y型轴接324,Y型轴接324发生转动,转动的Y型轴接324将夹爪323拉回,从而结束对PCB板的夹持。通过铰支座321、伸缩结构322、Y型轴接324和夹爪323的配合工作,实现了在下料过程中对PCB板的稳定夹持。
参照图2,将收料臂2设置为两个,同时对应的将收料夹爪组件3设置两组,与单组收料夹爪组件3相比较,将收料夹爪组件3设置成两组对PCB板的边缘进行夹持更加稳定,减小了PCB板因单个收料夹爪组件3夹持不稳定而发生变形的可能。
参照图2,翻转驱动组件4包括固定架41、转动杆42和驱动电机43,固定架41固定连接于整个PCB板生产过程中的机架上,驱动电机43连接在固定架41上,转动杆42固定连接在驱动电机43的输出杆上。将转动杆42与收料臂2的固定座1连接,即可实现翻转驱动组件4与收料夹爪组件3的连接,进而实现将PCB板由竖直状态旋转至水平状态完成下料并进行出料工作。
参照图1,需要注意的是,本申请中,驱动电机43采用的是只进行90°正反转的电机,从而使得PCB板只是进行垂直与水平方向的翻转切换。
参照图1,在驱动电机43与固定架41固定的中间设置滑移槽51与滑轨52,滑移槽51设置在电机外机壳的侧壁上,滑轨52设置在固定架41的侧壁,同时在驱动电机43外壳的底部设置有升降螺杆53,升降螺杆53的底部设置有电机,电机固定在固定架41的底座上。在PCB板生产的过程中,由于PCB板的规格不同,在下料的上一步过程中,PCB板的悬挂高度可能不同,此时只需要通过电机来调节升降螺杆53的升降,进而使得驱动电机43通过滑移槽51在滑轨52上下滑动,从而实现了高度的调节,进而使得翻转下料装置能够适用于不同悬挂高度的PCB板的生产。
参照图2和图3,当转动杆42设置有两个时,将两个转动杆42中的一个固定在电机的驱动轴上,将转动杆42的另一个滑动连接在电机的驱动轴上,本申请实施例公开一种滑动连接的方式,即在电机的驱动轴上开设轴向的移动凹槽13,与电机的驱动轴滑动连接的转动杆42上设置移动块14,移动块14能够沿电机轴向移动。当所生产的PCB板较宽时,将能够滑动的转动杆42向远离固定的转动杆42方向移动,从而使得夹爪323能够对较宽的PCB板进行夹持。当所生产的PCB板较窄的时候,将能够滑动的转动杆42向固定的转动杆42的方向移动,从而使得夹爪323能够对较窄的PCB板进行夹持。从而使得收料夹爪组件3能够适用于不同规格的PCB板。
参照图1,两个转动杆42之间设置有调节套杆6和调节套管7,同时将定位传感器设置在调节套管7上,本申请实施例中不显示定位传感器的具体位置和结构。当翻转下料装置要对宽度不同的PCB板进行夹持时,调节套管7与调节套杆6会通过定位传感器接收到的PCB板的宽度来调节两个转动杆42之间的距离,使得两个转动杆42之间的距离得以调节,从而使得翻转下料装置能够适用于不同规格的PCB板得以实现。
参照图2,将固定座1与收料臂2设置成可拆卸连接的形式,在固定座1上固定连接有若干插接杆12,在收料臂2上开设有若干插接孔。当需要对收料夹爪组件3进行更换或维修时,工作人员只需要将收料臂2从固定座1上取下即可。
本申请实施例1一种应用于PCB板生产的翻转下料装置的实施原理为:在PCB板的生产过程中,当PCB板要进行下料时,工作人员启动翻转驱动组件4,使得转动杆42进行90°旋转,由水平状态切换至竖直状态,由于收料臂2通过固定座1与转动杆42相连接,使得转动杆42转动的时候带动着收料臂2端部的收料夹爪组件3进行转动,从而使得收料夹爪组件3由水平状态变成竖直状态,当收料夹爪组件3到位后,收料夹爪组件3的伸缩结构322启动,推动Y型轴接324,使得夹爪323对PCB板实现一个夹持,夹持稳定后,翻转驱动组件4反向90°旋转,将PCB板由竖直状态转化成水平状态,水平状态的PCB板底部与出料装置的传送装置接触,此时收料夹爪组件3的伸缩结构322再次启动,向回拉回Y型轴接324,使得夹爪323展开,进而使得PCB板能够被出料装置的传送带运输走,从而实现了PCB板的翻转下料,减少了PCB板上的吸痕。
实施例2
本申请实施例2与实施例1的区别在于:实施例设置有支撑组件8。
参照图4,PCB板90°翻转的过程中,如果PCB板长度较长,或者是翻转的速度过快,未被收料夹爪组件3夹持的一端容易发生变形,进而导致PCB板的质量不合格。因此在PCB板的底端设置支撑组件8,支撑组件8的设置,在PCB板要进行90°翻转前,就与PCB板进行抵触,在翻转的过程中支撑组件8向着PCB板的方向发生一定距离的移动,进而使得支撑组件8对PCB板底部的抵接更加紧密,使得PCB板在翻转过程中更加稳定,增加了PCB板加工的合格率。
参照图4、图5和图6,支撑组件8包括第一伞齿轮81、第二伞齿轮82、升降杆83和移动支撑平台84,将第一伞齿轮81套设在驱动电机43的驱动轴上,使得第一伞齿轮81能够随着驱动电机43的旋转进行旋转,第二伞齿轮82与第一伞齿轮81啮合设置并位于第一伞齿轮81的上方,当第一伞齿轮81发生旋转的时候,第二伞齿轮82发生转动,固定在第二伞齿轮82上的升降杆83发生升降,进而使得升降杆83顶部的移动支撑平台84进行升降;需要注意的是,本申请实施例将升降杆83设置为螺纹套和螺纹杆的结合,同时将螺纹杆相邻外螺纹之间的间隙加大,使得第一伞齿轮81带动第二伞齿轮82旋转的时候螺纹杆的移动距离减小,有效地减小了支撑组件8将PCB板破坏的可能。
参照图7和图8,为了使得支撑组件8整个体系更为合理,在转动杆42靠近移动支撑平台84的一端开设有限位凹槽9,移动支撑平台84上固定设置有限位块10,使得移动支撑平台84与转动杆42的连接更加稳定的同时将支撑平台限制在了一定的范围内。
参照图5,将支撑组件8设置成两组,使得支撑组件8对PCB板底侧的支撑更加稳定,同时两组支撑组件8的设置,减小了支撑组件8发生旋转的可能。
参照图6,支撑平台的上表面覆盖了弹性抵接层,弹性抵接层的设置,使得移动支撑平台84与PCB板的底部抵接时PCB板的底部被破坏的可能性进一步减小。
参照图7,PCB板在生产过程中,不同批次的PCB板的竖直方向的长度可能是不一致的,因此将移动支撑平台84设置为伸缩盒状,移动支撑平台84的侧壁固定连接有距离传感器,当距离传感器接收到移动支撑平台84与PCB板的底部距离不合适时,即将信号传输给电动伸缩推杆11,电动伸缩推杆11即实现对移动支撑平台84的伸缩,进而使得翻转下料装置能够适用不同长度的PCB板。
以上均为本申请的较佳实施例,并非依此限制本申请的保护范围,故:凡依本申请的结构、形状、原理所做的等效变化,均应涵盖于本申请的保护范围之内。
- 一种应用于电子领域的PCB板固定装置
- 一种医药药板下料装置、运输装置和装盒包装自动化设备
- 一种应用于PCB板的定位治具
- 一种应用于PCB板生产的翻转AVI下板设备
- 一种PCB线路板生产用自动翻转装置及其翻转方法