一种输电线路用无人机巡检装置
文献发布时间:2023-06-19 19:16:40
技术领域
本发明涉及输电线巡检技术领域,特别涉及一种输电线路用无人机巡检装置。
背景技术
电力已经成为人们生活,工作中不可或缺的资源。高压输电在我国的电力能源传输过程中起着极其重要的作用,保证高压输电线设备正常稳定工作是电力管理中的核心问题。由于高压输电线大多长期暴露在野外环境中,受恶劣的天气状况、电气闪络、机械张力与材料老化等多种原因而产生线路断股、开裂、腐蚀等损伤,如不及时检修将严重影响电力的正常运行,甚至造成严重的停电事故和人身安全隐患。因此为了确保高压输电线路的安全运行,必须对高压输电线路进行定期巡视检查,了解高压输电线路的健康运行状况,将事故隐患消除在萌芽状态,对确保线路的安全正常运行具有十分重要的意义。而目前的巡检工作大多采用人工检查的方式,由于高压输电线大多位于野外、高空,人工巡检难度大、危险系数高。
针对输电线的巡检作业,一般采用无人机进行巡检,现有的无人机巡检设备种类繁多,使用时,一般是通过遥控飞行,然后悬挂定位至输电线上,最后在输电线上滑行,以进行巡检;但现有的无人机巡检设备也存在一些问题:利用飞行将设备悬挂置于输电线上,需要经过反复的位置校正,才能使设备上的滑轮与输电线对应,比较费时;而且对于输电线上的垃圾,或者输电线上的覆冰,不能进行清理;妨碍了巡检作业的进行。
公开号为CN112563965A的中国专利公开一种输电线巡检机器人及方法,机器人包括爬滑模块、飞行模块和检测模块,爬滑模块包括爬行轮组、滑行轮组、爬滑模态转换装置和机架,机架的下部由下向上设有导向槽;悬挂架的一端与机架固定连接,另一端与爬行轮架转动连接,爬滑模态转换装置的一端与机架可转动连接,另一端与爬行轮架的一端可转动连接,滑行轮组包括第一滑行轮和第二滑行轮,第一滑行轮和第二滑行轮安装于机架上并分别位于爬行轮架的两端;飞行模块和检测模块均与机架连接;整个输电线巡检机器人的中心位于第一爬行轮、第二爬行轮以及滑行轮组的下方。该专利能够通过机器人代替人工进行高空输电线巡检,彻底解决了人工巡检难度大、危险系数高问题;但没有解决上述技术问题,在与输电线定位对接时比较麻烦,且不能除去输电线上的垃圾。
发明内容
针对上述技术问题,本发明利用弧形挂钩,能快速将设备悬挂在输电线上,无需反复进行位置校正,在滑行时,能同时去除输电线上的垃圾。
本发明所使用技术方案是:一种输电线路用无人机巡检装置,包括基座,基座的两侧旋转设置有驱动部件,用于提供飞行动力和滑行动力;驱动部件包括旋转安装在基座上的转轴,转轴的两端分别固定连接有转架,转架上旋转设置有驱动桨叶,通过转轴携带转架转动九十度,以改变提供动力的形式;基座上固定安装有悬挂杆,悬挂杆的顶端设置有两个弧形杆,两个弧形杆上分别设置有上限位组件;悬挂杆上滑动安装有接触组件,用于与输电线进行接触;接触组件包括滑动安装在悬挂杆上的接触板,接触板的底端固定连接有连接齿条;在基座上滑动安装有两个下限位组件,两个下限位组件与任一个上限位组件组合,以对输电线进行包围;下限位组件包括滑动安装在基座上的齿条滑座,所述基座上旋转安装有变向齿轮,变向齿轮分别与齿条滑座和连接齿条构成齿轮副,当输电线与接触板接触时,接触板受到挤压并滑动,在齿轮传动下,齿条滑座运动,以调整下限位组件的位置。
进一步地,所述驱动部件包括与转轴固定连接的转轴齿轮,转架上固定安装有驱动电机,驱动电机的输出轴上连接有皮带传动结构,皮带传动结构与驱动桨叶连接,并驱动驱动桨叶;在基座的内侧固定安装有控制电缸,控制电缸的伸缩杆上固定连接有齿条一和齿条二。
进一步地,所述基座的两侧分别旋转安装转环,以及固定连接有固定环,转环的内侧设置有顶块,固定环的圆周上滑动安装有固定块,固定块与固定环之间设置有用于提供弹力的固定块弹簧,齿条一与转环构成齿轮副;当顶块接触挤压固定块时,固定块运动并与转架配合,以固定转架。
进一步地,所述转架上设置有定位孔,通过固定块的一端与定位孔配合,以固定转架。
进一步地,所述弧形杆的内侧设置有滚珠,上限位组件包括旋转安装在弧形杆上的限位轮一,以及固定连接在弧形杆上的支架二和支架一;支架二上设置有摄像组一,支架一上旋转安装有半圆刮环一。
进一步地,所述接触组件包括设置在接触板与悬挂杆之间的接触板弹簧,以及固定安装在悬挂杆上的扣合电缸,所述接触板弹簧用于提供弹力;扣合电缸的伸缩杆上滑动安装有扣合杆,扣合杆与扣合电缸的伸缩杆之间设置有用于提供弹力的扣合杆弹簧,扣合杆用于扣合并固定接触板。
进一步地,所述下限位组件包括滑动安装在齿条滑座上的升降座,升降座上旋转安装有限位轮二,其中一个下限位组件上设置有摄像组二,另一个下限位组件上旋转安装有半圆刮环二,以及固定安装有齿轮电机,齿轮电机的输出轴上固定连接有齿轮一,齿轮一与半圆刮环二构成齿轮副。
进一步地,所述下限位组件还包括固定安装在齿条滑座上的丝杆电机,丝杆电机的输出轴上的固定连接有齿轮二,齿条滑座上旋转安装有齿轮三,齿轮三与齿轮二构成齿轮副;在齿轮三上以螺旋副配合设置有升降丝杆,升降丝杆的一端与升降座固定连接。
本发明与现有技术相比的有益效果是:(1)本发明能改变驱动形式,转轴和转架转动九十度,改变驱动桨叶的方位,能在飞行和滑行的动力提供上进行转换,减小在设备上的动力负载;(2)本发明通过半圆刮环二与半圆刮环一将输电线包围,在滑行过程中,通过齿轮电机驱动齿轮一转动,在齿轮传动下,使得半圆刮环二和半圆刮环一转动,以除去输电线上的垃圾或者覆冰;(3)现有无人机设备需要经过人工进行多次位置校正,才能使装置悬挂置于输电线上,过程麻烦;本发明在靠近输电线时,不管位于输电线的哪一侧,接触板受输电线挤压,使得接触板滑动,且接触板弹簧压缩,则输电线会位于弧形杆的下方,此时就可控制本装置降低飞行高度,弧形杆直接就悬挂在输电线上,无需人工多次进行位置校正。
附图说明
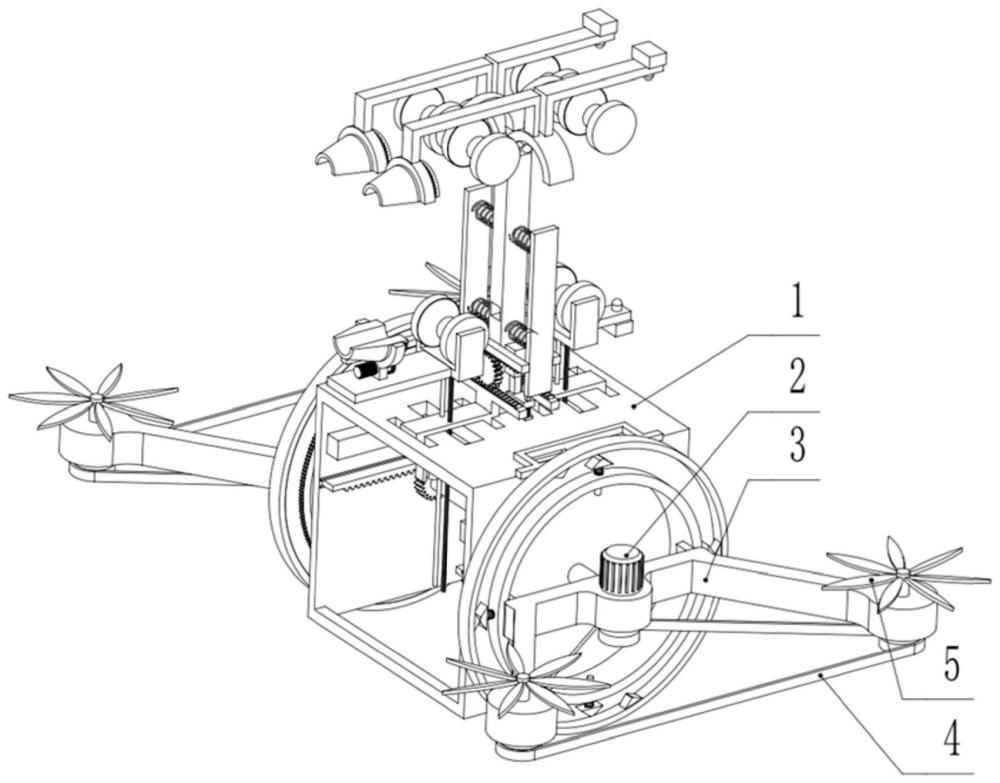
图1为本发明整体结构示意图。
图2为本发明驱动部件的正投影示意图。
图3为本发明基座侧面结构的正投影示意图。
图4为本发明基座内部结构正投影示意图。
图5我本发明悬挂杆与接触组件的安装结构示意图。
图6为本发明悬挂杆上的局部结构示意图。
图7为本发明下限位组件的正投影示意图。
附图标记:1-基座;101-固定环;2-驱动电机;3-转架;301-定位孔;4-连接皮带;5-驱动桨叶;6-转轴;7-转轴齿轮;8-转环;801-顶块;9-固定块;901-固定块弹簧;10-齿条一;11-控制电缸;12-齿条二;13-半圆刮环一;14-支架一;15-支架二;16-摄像组一;17-限位轮一;18-悬挂杆;1801-弧形杆;1802-滚珠;19-接触板弹簧;20-接触板;21-连接齿条;22-扣合电缸;23-扣合杆;2301-扣合杆弹簧;24-变向齿轮;25-齿条滑座;26-升降丝杆;27-半圆刮环二;28-齿轮一;29-齿轮电机;30-限位轮二;31-升降座;32-齿轮二;33-丝杆电机;34-齿轮三;35-摄像组二。
具体实施方式
下面结合具体实施例对本发明作进一步描述,在此发明的示意性实施例以及说明用来解释本发明,但并不作为对本发明的限定。
如图1、图2、图3和图4所示,基座1的两侧旋转设置有驱动部件,用于提供飞行动力和滑行动力;驱动部件包括旋转安装在基座1上的转轴6,转轴6的两端分别固定连接有转架3,转架3上旋转设置有驱动桨叶5,通过转轴6携带转架3转动九十度,以改变提供动力的形式;驱动部件包括与转轴6固定连接的转轴齿轮7,转架3上固定安装有驱动电机2,驱动电机2的输出轴上连接有皮带传动结构,皮带传动结构包括连接皮带4,即通过连接皮带4与驱动桨叶5连接,并驱动驱动桨叶5;在基座1的内侧固定安装有控制电缸11,控制电缸11的伸缩杆上固定连接有齿条一10和齿条二12;基座1的两侧分别旋转安装转环8,以及固定连接有固定环101,转环8的内侧设置有顶块801,固定环101的圆周上滑动安装有固定块9,固定块9与固定环101之间设置有用于提供弹力的固定块弹簧901,齿条一10与转环8构成齿轮副;当顶块801接触挤压固定块9时,固定块9运动并与转架3配合,以固定转架3;转架3上设置有定位孔301,通过固定块9的一端与定位孔301配合,以固定转架3。
如图5、图6和图7所示,基座1上固定安装有悬挂杆18,悬挂杆18的顶端设置有两个弧形杆1801,两个弧形杆1801上分别设置有上限位组件;悬挂杆18上滑动安装有接触组件,用于与输电线进行接触;接触组件包括滑动安装在悬挂杆18上的接触板20,接触板20的底端固定连接有连接齿条21;在基座1上滑动安装有两个下限位组件,两个下限位组件与任一个上限位组件组合,以对输电线进行包围;下限位组件包括滑动安装在基座1上的齿条滑座25,所述基座1上旋转安装有变向齿轮24,变向齿轮24分别与齿条滑座25和连接齿条21构成齿轮副,当输电线与接触板20接触时,接触板20受到挤压并滑动,在齿轮传动下,齿条滑座25运动,以调整下限位组件的位置;弧形杆1801的内侧设置有滚珠1802,上限位组件包括旋转安装在弧形杆1801上的限位轮一17,以及固定连接在弧形杆1801上的支架二15和支架一14;支架二15上设置有摄像组一16,支架一14上旋转安装有半圆刮环一13;接触组件包括设置在接触板20与悬挂杆18之间的接触板弹簧19,以及固定安装在悬挂杆18上的扣合电缸22,接触板弹簧19用于提供弹力;扣合电缸22的伸缩杆上滑动安装有扣合杆23,扣合杆23与扣合电缸22的伸缩杆之间设置有用于提供弹力的扣合杆弹簧2301,扣合杆23用于扣合并固定接触板20。
下限位组件包括滑动安装在齿条滑座25上的升降座31,升降座31上旋转安装有限位轮二30,其中一个下限位组件上设置有摄像组二35,另一个下限位组件上旋转安装有半圆刮环二27,以及固定安装有齿轮电机29,齿轮电机29的输出轴上固定连接有齿轮一28,齿轮一28与半圆刮环二27构成齿轮副;下限位组件还包括固定安装在齿条滑座25上的丝杆电机33,丝杆电机33的输出轴上的固定连接有齿轮二32,齿条滑座25上旋转安装有齿轮三34,齿轮三34与齿轮二32构成齿轮副;在齿轮三34上以螺旋副配合设置有升降丝杆26,升降丝杆26的一端与升降座31固定连接。
本发明工作原理:驱动电机2工作,以驱动驱动桨叶5,实现飞行;用过人工遥控控制本装置飞至输电线;现有无人机设备需要经过人工进行多次位置校正,才能使装置悬挂置于输电线上,过程麻烦;本实施例在靠近输电线时,不管位于输电线的哪一侧,接触板20受输电线挤压,使得接触板20滑动,且接触板弹簧19压缩,则输电线会位于弧形杆1801的下方,此时就可控制本装置降低飞行高度,弧形杆1801直接就悬挂在输电线上,无需人工多次进行位置校正;接触板20滑动时,会与扣合杆23接触,并通过扣合杆23进行扣合固定;以固定接触板20的位置,同时,接触板20滑动时,连接齿条21跟随接触板20滑动,又在齿轮传动下,变向齿轮24转动,并且齿条滑座25滑动,使得齿条滑座25与连接齿条21的滑动方向相反,这样就可调整齿条滑座25的位置,使得下限位组件和上限位组件对齐;即不管本装置飞行至输电线的哪一侧,均可实现下限位组件和上限位组件对齐。
本装置通过弧形杆1801悬挂至输电线上后,丝杆电机33驱动齿轮二32转动,在齿轮传动下,齿轮三34转动,使得升降丝杆26携带升降座31运动,进而使限位轮二30靠近限位轮一17,通过限位轮一17与限位轮二30将输电线包围,同时,通过半圆刮环二27与半圆刮环一13将输电线包围,在滑行过程中,通过齿轮电机29驱动齿轮一28转动,在齿轮传动下,使得半圆刮环二27和半圆刮环一13转动,以除去输电线上的垃圾或者覆冰。
改变驱动形式时,需要控制电缸11控制齿条一10和齿条二12滑动,首先是在齿轮出传动下,转环8转动,使得顶块801与固定块9错开,进而固定块9不再固定转架3,然后齿条二12与转轴齿轮7啮合,在齿轮传动下,使转轴6和转架3转动九十度,改变驱动桨叶5的方位,最后齿条二12与转轴齿轮7脱离啮合,且转环8继续转动,使得顶块801再次与固定块9进行接触挤压,使固定块9运动并再次固定转架3,最终改变驱动形式,为本装置在输电线上进行滑行提供动力;滚珠1802与输电线接触,能减小滑行摩擦力;在滑行过程中,通过摄像组一16和摄像组二35对输电线的使用情况进行巡检。
本发明不局限上述具体实施方式,所属技术领域的技术人员从上述构思出发,不经过创造性的劳动,做出的种种变换,均落在本发明的保护范围之内。
- 一种输电线路无人机巡检方法、装置、终端及存储介质
- 输电线路巡检无人机及输电线路巡检系统
- 一种输电线路巡检及拆除影响输电线路安全鸟巢无人机