采用距离测量装置的实时铁轨磨损和缺陷监测系统
文献发布时间:2024-01-17 01:21:27
本PCT国际申请要求于2021年8月30日提交的标题为“REAL-TIME RAIL WEARANDDEFECT MONITORING SYSTEM EMPLOYING DISTANCE MEASUREMENG DEVICES”的美国专利申请号17/461,413的以及于2020年9月4日提交的标题为“REAL-TIME RAIL TRACKPROFILE,SURFACE WEARAND TRACK DEFECT MEASUREMENT SYSTEM”的美国专利申请号63/074,679的权益和优先权,所述美国专利申请中的每个特此以其整体通过引用并入本文中。
本发明与铁轨监测系统和方法相关,并且特别地与采用距离测量装置的铁轨监测系统和方法相关。
轨道和铁轨的监测传统上已采用查修(walk)轨道以在视觉上检查它们并且在可行的情况下进行必需的调整和/或修理或者报告对调整和/或修理的需要的一个或多个检查员。这是极其慢的、劳动密集的、昂贵的并且易于出错。
近来,已经开发了各种技术来改进监测轨道和铁轨的效率和精度。安装在特殊的手推车和/或车厢上的测量装置是一种进步,如更复杂的测量装置,其中的一些测量装置可以安装在在要被检查和监测的轨道上操作的列车上。
最近的轨道监测系统的一个示例包括在2020年8月25日公布的标题为“ImageBased Monitoring and Detection ofRail/TrackFaults”的授予美国新泽西州PrincetonJunction的Avante International Technology,Inc.的申请人的美国专利10,752,271。
申请人相信,可能存在对用于采用操作以直接感测与铁轨(例如,与其铁轨轨头)关联的以及轨道的物理测量的距离测量传感器阵列的监测轨道和/或(一个或多个)铁轨的系统和方法的需要。
相应地,用于检测和测量铁轨和/或轨道缺陷的系统可以包括:测量到铁轨轨头的距离的多个飞行时间(TOF)距离测量传感器的阵列;具有覆盖多于铁轨轨头的宽度的一半以及沿着铁轨的距离的视场;其中距离测量传感器的光斑(spot)区域是互补的以获得到铁轨轨头的距离测量数据;距离测量传感器被同步并且来自其的尺寸数据被地理标记;存储器,其用于存储距离测量数据和关联的地理标记数据;处理器,其用于处理到铁轨轨头的距离测量数据以确定铁轨轨头的至少包括铁轨轨头的宽度和高度的一半的尺寸数据,以用于检测铁轨磨损和铁轨缺陷,其中操作传感器阵列以获得尺寸数据,从所述尺寸数据可以测量和检测铁轨磨损、表面缺陷、铁轨结构缺陷、铁轨断裂和裂纹、和/或铁轨中的接头中的间隙。
进一步地,用于检测和测量轨道缺陷的方法可以包括:获得布置用于测量到铁轨轨头的距离以用于获得铁轨轨头的尺寸数据的多个飞行时间(TOF)距离测量传感器的阵列;将所述传感器阵列配置成具有覆盖多于铁轨轨头的宽度的一半以及覆盖沿着铁轨的预定距离的视场;将所述传感器阵列配置成具有配置成一起至少覆盖多于铁轨轨头的宽度的一半和预定距离的互补的距离测量传感器光斑区域;选择每个距离测量传感器的光斑区域以与其它距离测量传感器的光斑区域的其它光斑区域互补,以获得到铁轨轨头的距离测量数据;使所述传感器阵列的距离测量传感器同步并且地理标记来自其的尺寸数据;存储包括关联的地理标记数据的距离测量数据;处理到铁轨轨头的距离测量数据,以确定铁轨轨头的至少包括相对于已知良好铁轨的铁轨轨头的宽度和高度的铁轨轨头的宽度和高度的一半的尺寸数据,所述处理所述尺寸数据包括检测铁轨磨损和铁轨缺陷,所述方法操作所述传感器阵列以获得尺寸数据,从所述尺寸数据可以测量和检测铁轨磨损、表面缺陷、铁轨结构缺陷、铁轨断裂和裂纹、和/或铁轨中的接头中的间隙。
在总结本文中描述和/或要求保护的布置时,可以进行或简化在本文中的详细描述中描述的概念和/或元件和/或步骤的选择。任何总结都不意图识别与所要求保护的主题相关的关键特征、元件和/或步骤,或者基本特征、元件和/或步骤,并且因此不意图是限制性的,并且不应该被解释为限制或定义所要求保护的主题的范围和广度。
附图说明
当结合附图的图形阅读时,将更容易且更好地理解(一个或多个)优选实施例的详细描述,附图包括:
图1是本布置的铁轨监测系统的示例实施例的透视图,图1A和图1B是为此的示例安装布置的透视图,并且图1C是图示为此的示例安装布置的铁轨车的侧视图;
图2A、图2B和图2C是图示图1至图1C的铁轨监测系统的视场的示例的铁轨的截面图;
图3A和图3B是表示针对图1至图1C的铁轨监测系统可使用的距离测量传感器阵列的示例布置的平面图的示意图,并且图3C是与图3A和图3B的某些示例实施例相关的表;
图4是表示针对图1至图1C的铁轨监测系统可使用的距离测量传感器阵列的另一示例布置的平面图的示意图,并且图4B是与图4的某些示例实施例相关的表;
图5是图1至图1C的示例铁轨监测系统的示例实施例的示意框图;
图6A是示例铁轨轨头的截面图,并且图6B是图示其示例磨损状况的示例铁轨的截面图;
图7是图示铁轨的不同铁轨磨损状况的示例的铁轨段的透视图,并且图7A至图7D图示铁轨的各种距离测量;以及
图8是图示由本文中描述的示例铁轨监测系统执行的示例方法或过程的示意流程图,并且图8A、图8B和图8C是图示其某些特征的细节的示意流程图。
在附图中,在元件或特征在多于一个的附图图形中示出的情况下,相同的字母数字名称可以用于在每个图中指定此类元件或特征,并且在紧密相关或修改的元件在附图中示出的情况下,相同的字母数字名称可以加撇或指定为“a”或“b”等以指定修改的元件或特征。类似的元件或特征可以在附图的不同图中由相像的字母数字名称来指定,并且在说明书中具有类似的命名法。如常见的,附图的各种特征不是按比例的,为了清楚性,各种特征的尺寸可以任意扩大或减少,并且在任何图中陈述的任何值仅作为示例。
具体实施方式
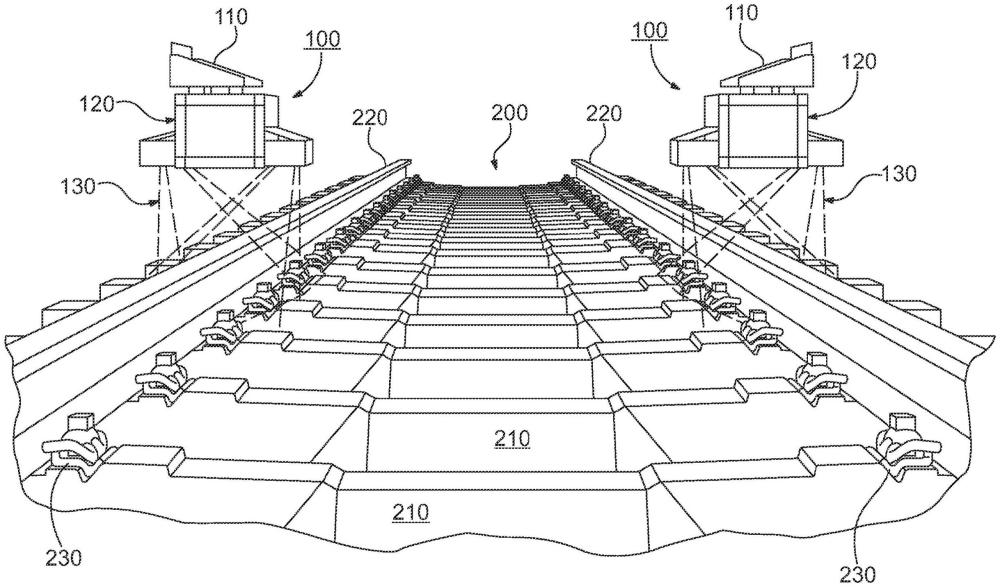
图1是本布置的铁轨监测系统100的示例实施例的透视图,图1A和1B是为此的示例安装布置130的透视图,并且图1C是图示为此的示例安装布置130的铁轨车250的侧视图;以及图2A、图2B和图2C是图示图1至图1C的铁轨监测系统100的视场130的示例的铁轨220的截面图。
示例轨道200包括两个间隔开的平行铁轨220,所述平行铁轨被支撑在由铁轨路基和道碴205支撑的多个枕木210或轨枕210上。每个铁轨220通过铁轨紧固件230固定到每个枕木,其中存在许多不同类型和种类的铁轨紧固件。铁轨220的内侧(轨距侧)之间的距离是轨道的轨距。一种常见的标准轨道轨距是四英尺八又二分之一英寸(4'8
虽然可以采用单个监测系统100和传感器阵列120以用于监测轨道200的一个铁轨220,使得在轨道200上在相反方向上操作的列车的系统100将监测其两个铁轨220,但是优选的是,采用两个系统100或具有两个传感器120阵列的一个系统100,使得在相同时间监测轨道200的两个铁轨220,这也促进使用通过预定的已知距离横向于轨道200而间隔开的两个系统100来监测轨道轨距。
示例铁轨车250包括底盘255,其支撑由在轨道200上运行的铁轨车250和多个卡车260携带的负载。示例铁轨车250优选地是机车或发动机,在所述情况下,底盘255通常携带一个或多个马达或发动机,例如,电动马达和/或柴油发动机,以及其它技术设备,例如变压器和其它电气设备、控制设备、操作员室、通信设备、电池和/或燃料箱、受电弓和与外部电力源(诸如架空线和第三铁轨)的其它电气连接。铁轨车意图涵盖在轨道上和/或沿着轨道运行的任何机车、发动机、车厢和/或其它车辆;轨道可以包括一个或多个铁轨、用于铁轨车的一个或多个支撑、轨道路基和/或任何种类的导向装置。
在实践中,发动机或机车250是最重的铁轨车250中的一个,如果不是最重的,并且因此在铁轨和轨道上引起最大的负载和应力,并且因此更有可能产生在它们被重负载和/或施加应力时存在的明显的铁轨缺陷。相应地,机车250是在其上安装铁轨监测设备100的理想的铁轨车250。此外,由于与存在其它种类的铁轨车250相比存在更少的机车250,因此如果安装到机车铁轨车,则需要更少的铁轨监测系统100。对于操作铁轨监测系统100和/或与铁轨监测系统100协作通常需要和/或有用的电力和通信设备通常在机车250上找到,但不在其它种类的铁轨车250上找到。图示了普通的卡车260,然而,注意到,为机车铁轨车250和列车中连接到其的其它铁轨车250提供驱动功率的发动机或机车250的卡车260通常包括电动或其它动力设备或与电动马达或柴油马达的机械连接,以用于向车轮280和/或附加的驱动轮等传送动力功率。
铁轨监测设备100可以以以下若干可接受的方式中的任何一种方式安装到铁轨车250:例如在其底盘255上或在其卡车260上。图1A图示了到底盘255的下侧的设备100的至少距离测量传感器120的示例安装,其中支撑结构110将距离测量传感器120基本上竖直地支撑在相应铁轨220上,并且距离测量传感器120提供铁轨220的竖直向下的视野。图1B图示了到卡车260的端部的设备100的至少距离测量传感器120阵列的备选示例安装,其中距离测量传感器120被竖直地安装在相应的铁轨220上方以提供基本竖直向下的视野。图1C图示了从铁轨车250的侧面观察的前述示例安装,其中距离测量传感器120悬挂在卡车260之间并且基本上向下指向,以便竖直向下观察铁轨220。
在这些布置中的任何布置中,距离测量传感器120与铁轨200的铁轨轨头226的轨顶之间的竖直距离可以在大约100mm至300mm的范围中。除了距离测量传感器120阵列之外的铁轨监测设备100的元件可以安装在距离测量传感器120附近,例如在铁轨车底盘255上或卡车260上,或者可以全部或部分安装在铁轨车250内部,例如如当铁轨车250是机车或发动机250时。一般地,后者可以是优选的。当传感器120安装到卡车260时,优选的是,它们安装到其未安装弹簧的部分262,使得它们到铁轨220的距离不受支撑铁轨车250的底盘的卡车260的弹簧的膨胀和压缩的影响。
在这些布置中的任何布置中,用于系统100的支撑结构110可以并且通常被提供以在意图提供期望视场130的位置和取向处(例如,竖直向下),将距离测量传感器120支撑在卡车260的未安装弹簧的部分262上或底盘255上。阵列120SA的示例总体基本上矩形的FOV的取向可以使得其较短或宽度尺寸与铁轨220交叉,或者使得其较长或长度尺寸沿着铁轨220,然而,另一取向可以被认为对于获得铁轨220的配置和/或状况的特定方面的测量是理想的。
传感器阵列120SA的总体或组合FOV 130通常并且优选地是每个距离测量传感器120S的FOV光斑的基本矩形集合(例如,像“FOV阵列”)。即使单独距离测量传感器120S的FOV光斑可以不是矩形的,例如,是圆形、椭圆形或卵形形状的,相邻的单独传感器120S的相应FOV光斑的边缘可以接触,或可以重叠,或可以在其间具有间隙。任何重叠和/或间隙的大小优选地相对于单独FOV光斑的总体大小是小的,例如小于其直径或其它横向尺寸的大约50%。
在前述布置中的任何布置中,其中采用两个距离测量传感器阵列120,轨道200的轨距可以从由两个距离测量传感器120提供的铁轨220的表示中的铁轨220的定位确定,并且使用已知尺寸(例如,距离测量传感器120之间的固定的已知距离)计算。该距离可以作为设备100的校准过程的一部分由校准固定装置(例如,具有轨道和铁轨的标准尺寸的轨道和铁轨或标尺)物理地测量和/或定义。
用于校准系统100的轨道的典型区段(例如,段)采用一对“已知良好铁轨”(KGR)(通常是新的未使用的标准铁轨段),其在适当的准确度的情况下间隔开到标准轨距,从而包括“已知良好轨道”(KGT)。校准通常在设备100最初安装在铁轨车250上时或之后执行,以及以有规律的重新校准间隔和/或作为其维护或修理的一部分执行。
备选地,具有标记在其上的标准标称轨距(例如,4英尺8.5英寸或1435mm)的示例校准固定装置可以跨搁在铁轨220上的轨道200放置,并且可以或通过调整它们的相对物理定位或通过电子地调整铁轨220的表示来调节距离测量传感器阵列120,使得校准固定装置的标准轨距标记在距离测量传感器阵列120的相应视场130内在其中的预定定位,例如,在那些表示的中心处。轨距可以通过简单计算从每个铁轨的轨距面在由每个距离测量传感器120阵列提供的其相应表示中的位置和校准的轨距距离来容易地确定(测量)。
例如,如果轨道200的铁轨的操作表示中的铁轨220的位置在其中的预定定位处,例如在相应的FOVS 130的中心处,或者如果两者向左或向右相同量,则所述轨距是标称的。如下面进一步描述的,可能期望铁轨220的轨距面更靠近FOV 130的内边缘,使得可以采用较小的传感器120阵列(例如,较窄的FOV宽度),例如以观察铁轨轨头的宽度部分,在所述情况下,轨距测量计算是相同的,但是与如果所有都居中的话相比,在表示中的位置和/或传感器阵列120对之间的校准距离可以具有不同的值。
进一步地,校准还可以包括验证由传感器阵列120、120S的距离测量传感器测量的到特定对象的距离,例如到铁轨、铁轨紧固件和/或其任何部分(诸如飞行时间(TOF)测量装置120、120S)的距离。虽然TOF距离测量装置120、120S趋向于被固有地校准,因为它测量例如光的传输和其由于反射的返回之间的时间(作为距离的直接指示符),但是如安装在铁轨车250上的校准可能期望识别可能由于安装布置(例如,位置和角度)中的公差和变化而引入的误差,以及各种类型和种类的铁轨车和/或其部分之间的差异。
轨道和/或铁轨监测设备100通过采用距离测量传感器120来捕获其FOV 130内的距离的表示而监测轨道200和其铁轨220,如果其FOV被如此取向并且具有足够的宽度,则其可以包括铁轨紧固件230中的一个或多个的所有或部分。铁轨紧固件230的距离表示可以用于识别所表示的铁轨紧固件的类型,并从来自其标准表示的所测量的尺寸的变化来确定所紧固的铁轨是否松开、松动(lose)或损坏,或者以其它方式需要维护或修理。
一个或多个距离测量传感器120被安装到铁轨车250,例如,安装到铁轨车250的底盘255,安装在它们可以被瞄准使得它们的FOV满足前面段落中的标准的位置中。在采用两个距离测量传感器120的情况下,距离测量传感器120中的每个优选地被安装到底盘255的下侧,或被安装到直接在铁轨220中的相应一个上方的卡车260,以便具有铁轨220的直接视野。每个距离测量传感器120阵列与在其FOV内的铁轨轨头226之间的距离D可以是大约100-300mm(大约4-12英寸),然而,更少或更大的距离(例如,高达一米)也是令人满意的。
在图1至图1C的实施例中,将距离测量传感器120安装到铁轨车250的底盘255或安装到卡车260(优选地安装到卡车260的未安装弹簧的部分262)的支撑结构110通常将距离测量传感器120与底盘255或卡车260间隔开,使得其例如以距其期望的距离D更靠近铁轨220。
铁轨220具有在铁轨轨头226的轨顶与轨腰(web)222的底部之间的标称标准总体高度HR、在铁轨220的轨顶与其轨腰222上直接在其轨距侧表面下方的点之间的标称标准参考高度HREF、在其轨距侧之间的标称标准铁轨轨头宽度WRH、在其轨顶与其轨距侧表面的底部边缘之间的标称标准铁轨轨头高度HRH、以及在其轨腰的相对边缘之间的标称标准宽度WRW。距离测量传感器120阵列被安装使得其是铁轨轨头226的轨顶上方的优选标称竖直距离D。例如由于铁轨车250的负载和/或摇晃和/或卡车260的车轮的磨损的距离D的变化趋向于通过其测量精度的一致性的帮助从由传感器阵列220提供的铁轨220的距离表示的大规模减法处理中抵消。
在标准铁轨220的一个示例中,铁轨具有大约140mm(大约5.5英寸)的标称总体高度HR、大约119.2mm(大约4.69英寸)的标称参考高度HREF、大约70mm(大约2.76英寸)的标称铁轨轨头宽度WRH、大约30.3mm(大约1.19英寸)的标称铁轨轨头高度HRH以及大约114mm(大约4.48英寸)的标称标准宽度WRW。
距离测量传感器120具有相应的视场(FOV)130,其优选地包括多于铁轨220(车轮280在其上运行)的铁轨轨头226的标称宽度WRH的大部分(即,>50%),其优选地还可以在FOV 130内包括至少沿着其轨距侧固定铁轨220的铁轨紧固件230的至少一部分。在另一优选配置中,距离测量传感器120配置成具有比铁轨轨头226的宽度WRH更宽的FOV,以便甚至在距离测量传感器120的侧向移动的情况下跨铁轨轨头226测量所有。
因为在铁轨车250在轨道200中行驶弯道时和/或在铁轨车250的卡车260在轨道轨距公差内在铁轨220之间例如侧向移动时,卡车260相对于底盘255和铁轨220旋转,所以FOV通常相对于铁轨220向左(图2B)和向右(图2C)移动。距离测量传感器120的这种配置及其安装避免了FOV移动得太多以致于在其标称移动的极限(extreme)处不包括铁轨轨头226的宽度WRH的至少大部分,如果不是在轨距公差内针对铁轨的其最大移动的话,以及在由于例如铁轨磨损、轨道轨距公差和可能的铁轨侧向(横向)移位(例如由于铁轨紧固件的扭曲和/或松动)导致轨距加宽的情况下。
优选地,传感器阵列120具有如图2A-2C中图示地对铁轨轨头226的期望区域过扫描的FOV 130,使得当列车运动(例如卡车260在铁轨220之间的侧向运动)时,要被测量的铁轨轨头226的宽度WRH的部分保持在FOV 130内,使传感器阵列120向左和向右移动。优选地,FOV 130包括铁轨轨头226的整个标称宽度WRH加上预定的附加宽度,使得铁轨轨头226的整个标称宽度WRH在距离测量传感器阵列120SA相对于铁轨220(它们在其上定位)的侧向运动的预期范围以及例如由于公差、磨损和/或其它原因引起的轨道轨距的至少最大可允许加宽上保持在FOV 130内。
具有覆盖铁轨轨头226在其中心线与其轨距面之间的部分(加上允许卡车260的侧向移动的余量)的FOV的系统100也是适合的,例如,在期望减少的复杂性或较低成本的系统100的情况下,同时提供铁轨轨头226的内半(在正常情形下认为最显著的铁轨磨损发生在该处)的铁轨轨头轮廓测量。
因为距离测量传感器120优选地包括具有红外(IR)光源(例如,IR光的激光光源)的传送器及其接收器,所以不存在对照明光源(例如,可见光、红外光和/或其它光的源)的需要来确保FOV 130内的光水平足够以在不同的环境光和天气状况(包括直射阳光)下获得铁轨220的令人满意的表示。
结构110通常包括结构支撑、阻尼器和/或隔振底座,以便减少由于振动和其它不期望的运动引起的距离测量传感器阵列120的运动,所述振动和其它不期望的运动可能由沿着轨道200运行的铁轨车250和/或由铁轨车250上的设备(例如,柴油发动机)引起。还可以提供镜头清洁特征(例如,镜头擦拭器或喷雾清洁器或罩或其它护罩),以减少由距离测量传感器120由于随时间和使用可能趋向于变得沉积在其镜头上的湿气、灰尘、污垢和其它碎屑的累积产生的距离表示的劣化。
传感器阵列120的视场FOV 130被图示为一般是矩形,如这样的情况:例如,每个传感器阵列基本上竖直地安装在相应铁轨220上方,并且旨在单独地观察每个铁轨220。如果距离测量传感器120被安装高于铁轨220的显著距离,则其视场的小发散角将增加在其视场130内的在较大距离处的区域的大小,并且如果其被安装得较低(例如,更靠近轨道200),则将减少在该FOV 130内的区域的大小。
图3A和图3B是表示针对图1至图1C的铁轨监测系统100可使用的距离测量传感器120S阵列的示例布置的平面图的示意图,图3C是与图3A和图3B的某些示例实施例相关的值的表;以及图4是表示针对图1至图1C的铁轨监测系统100可使用的距离测量传感器120S阵列的另一示例布置的平面图的示意图,以及图4B是与图4的某些示例实施例相关的示例值的表。
距离测量传感器120S的示例阵列120SA中的每个包括多行传感器120S和多列传感器120S。每个示例传感器阵列120SA具有总体长度(在图示中是竖直的)尺寸Hy(即,在沿着铁轨200的纵向方向上)和总体宽度(在图示中是水平的)尺寸Wx(即,在横向于铁轨200的方向上)。每个距离测量传感器阵列120SA包括数量N个距离测量传感器120S,其中其每个行通常具有相同数量Nx个传感器120S,并且其每个列通常具有相同数量Ny个传感器120s,其中Nx和Ny在任何给定阵列120SA中可以是相同数量或不同数量。
距离测量传感器阵列120SA的实施例的多个示例被图示并且包括例如4×5=20个传感器阵列和4×8=32个传感器阵列,并且在图3C和图4B的附表中阐述了其示例特征。可以在传感器阵列120SA的行中提供附加的传感器120S,以增加阵列120SA的FOV的宽度,和/或以增加其在横向于铁轨220的方向上的分辨率。类似地,可以在其列中提供附加的传感器,以增加阵列120SA的FOV沿着铁轨220的长度,和/或以增加其在沿着铁轨220的方向上的分辨率。
在每个传感器阵列120SA中,多行传感器120S在相邻传感器之间具有竖直分离距离Sy,并且多列传感器120S在相邻传感器120S之间具有水平分离距离Sx,并且在其每个列中具有用于相邻传感器120S的相应水平偏移距离Ox。在一个优选的布置中,每个距离测量传感器阵列120SA包括布置在基本上平面的基板或其它支撑上的数量N个距离测量传感器120S。
每个距离测量传感器120S包括发射具有给定固定频率的信号的传送器部分Tx和具有多个接收元件的接收器部分Rx,所述多个接收元件用于接收发射信号的反射,所述反射由通过传送器部分Tx照明的对象(例如,铁轨220)反射。优选地,传送器Tx发射红外(IR)信号,并且其通过传送器Tx的传输和其通过接收器部分Rx的接收元件中的一个或多个的接收之间的时间延迟(例如,其飞行时间TOF)直接表示距离测量传感器120S与例如铁轨220之间的距离。
因为由传送器发射的IR光的光束的直径随着传感器120与感测的对象(例如,铁轨220)之间距离的增加而增加,所以传感器120S可以在平面基板上分离更大的距离Sx、Sy,或者可以保持相对更靠近并安装到平坦的或具有例如圆柱的或球等的表面的一部分的曲率的支撑。
有利地,距离测量传感器120的阵列提供其传感器120S的组合FOV中的事物(例如,铁轨220)的三维表示。由排列成二维阵列的Nx、Ny个传感器提供两个尺寸,例如X和Y。第三尺寸(例如,Z)由来自传感器阵列120SA的传感器120S中的每个的距离测量提供。关于铁轨220,X尺寸覆盖例如在组合视场内铁轨220的(例如,其铁轨轨头的)的宽度(例如,水平宽度),Y尺寸覆盖在组合FOV内的铁轨的所述部分的长度(例如,水平长度),并且Z尺寸覆盖铁轨的竖直尺寸(包括例如轨顶的尺寸和铁轨轨头的形状),并且在典型情况下,从轨顶到铁轨的轨腰的距离,如下面描述的。
距离测量传感器120S可以是任何距离测量传感器,其提供适合的分辨率以用于检测铁轨220中的可辨别的缺陷、以及在具有足够宽的FOV的阵列中检测其铁轨紧固件230以及用于在与用于平行铁轨的关联传感器120S结合采用时确定轨道轨距,其从距离测量数据和适合高的帧速率可确定,以便在铁轨车250以速度行进时连续地表示一个或多个铁轨220。帧速率(传感器120S的阵列120SA以所述帧速率操作)可以是固定的,例如,以确定的速率,以获得以给定速度或以要行进的最大速度行进的距离的期望分辨率,或者帧速率可以与铁轨车250(传感器120S安装在其上)以其行进的速度成比例地控制,并且在一个示例中优选地与实际速度成比例地控制,以便在测量数据的连续帧之间维持基本上相同的行进距离,而与速度无关。
标准1435mm(4'8
对于具有70mm铁轨轨头宽度的示例铁轨220,所要求的视场宽度会是铁轨轨头宽度加上最大准许加宽公差,其会是70mm+23mm=105mm,而对于高达1470mm加宽轨距会是70mm+18mm=88mm。因为铁轨磨损主要在铁轨轨头的轨距侧上,即,车轮280的凸缘沿着其运行的铁轨轨头的侧,这也是缺陷更可能存在的地方,如果人们选择仅监测铁轨的轨距侧上的铁轨轨头宽度的50%,则视场的宽度会分别是35mm+23mm=58mm,以及35mm+18mm=53mm。
适合的飞行时间TOF距离测量传感器120S的示例可以包括例如来自美国加利福尼亚州San Jose的Broadcom Inc.的商业上可用的型号AFBR-S50MV85G。根据Broadcom数据表单,其传送器从850nm波长的激光光源发射IR光,并且其接收器具有4×8像素阵列的相邻接收器元件(总共32个),其中的大约7-16个像素通常由反射的IR光照明。该TOF距离测量传感器具有高达3KHz的帧速率以及高达且大于10m的距离范围,并且在大约0.1mm精度内的测量距离。
因为撞击在铁轨220上的每个激光光斑的大小(例如直径)在距离测量传感器阵列120SA与铁轨220之间的较长距离D处成比例地更大,所以距离测量的分辨率随着增加的距离D成比例地降低,例如因为每个距离测量传感器120S测量其光斑区域上的平均距离。相应地,本文描述的任何布置的距离测量传感器120、120S优选地被安装为距被测量铁轨220大约100-300mm的距离D,并且更优选地被安装在距其大约100mm的距离D处。
在传感器阵列120SA与要测量到其的距离为大约100mm(大约4英寸)的对象(例如,铁轨220)之间的示例距离D处的此类传感器的阵列的情况下,每个传送的IR光光束具有大约7mm的标称直径,并且每个像素具有大约2.7mm的FOV,从而照明7个和16个之间的像素,通常大约9个像素。目前认为D=100mm是针对在所描述的示例实施例中的测量的适合距离,然而,更短和更长的距离D也是适合的。
10个传感器120S的阵列可以以大约3mm的间隔提供测量的距离表示,15个传感器120S的阵列可以以大约2mm的间隔提供测量的距离表示,并且30个传感器的阵列可以以大约1mm的间隔提供表示。示例传感器120S的光斑直径在大约100mm的距离D处为大约8-10mm,并且在大约300mm的距离D处为大约24-30mm。虽然每个阵列测量是在沿着铁轨220的特定位置处,但是可以在沿着铁轨220的较长距离上对此类测量求平均,以获得对于轨道220的特定区段的平均铁轨轮廓测量,如出于铁轨监测和维护目的可能是理想的。作为示例,以更精细的分辨率为高速弯道提供处理的铁轨测量数据可能是理想的,相比于对于因为磨损和缺陷趋向于更慢产生并且呈现相对较低的风险因而较低分辨率是令人满意的轨道的侧线和类似的较低速度区段,在高速弯道处,磨损和缺陷可能产生得更快并且呈现更大的风险。
无论可以如何处理和利用测量数据,本布置保留了能够提供对所有铁轨的相对实时和日常监测的优点,配备具有铁轨监测系统100的列车在所述铁轨上操作,并且在足够的分辨率和精度的情况下这样做以在磨损和检测缺陷变得严重到足以以对生命和财产呈现风险之前测量磨损和检测缺陷。
使用以3KHz帧速率(即3000帧每秒)操作的示例传感器120S将在携带传感器阵列120SA的铁轨车以正常操作速度行进时沿着铁轨220提供基本上连续的感测。例如,当以60英里每小时(mph;大约100km/hr)或88ft/sec行进时,1/3000秒中覆盖的距离等于:沿着铁轨方向88ft/sec×1/3000=0.029ft=7.5mm。因此,在y方向上(即沿着铁轨),存在充足的分辨率,以检测间隙和裂纹以及其它相对小的缺陷。
利用该采样速率,在120mph(大约200km/hr)下,每个表示覆盖大约15mm,并且在240mph(大约300km/hr)下,每个表示覆盖大约30mm。因为示例阵列120SA具有36mm或更大的Y尺寸Hy,所以即使当铁轨车以240mph(大约300km/hr)移动时,所描述的示例布置能够覆盖轨道的完整长度而在数据中没有实质上的间隙。进一步地,因为IR光的脉冲长度非常短(例如大约10纳秒),所以测量间隔足够短,使得当传感器阵列120SA在以高操作速度行进的铁轨车上时,在该时间获得的铁轨220的表示的尺寸精度将不受在测量间隔期间行进的相对短距离影响。
传感器阵列120SA的所有距离测量传感器120S可以被同步以同时(例如,在相同时间)进行距离测量,或者它们可以被同步以按次序进行距离测量,其中所述次序可以是一次一个,或者可以是一次一行或一次一列,或者按另一期望的次序。在任何情况下,基本上同时进行距离测量的每个集合,例如,传感器阵列120SA的所有传感器120S的次序的持续时间是每个帧的时间的大约十分之一或更少,并且优选地处于每个帧的时间的大约百分之一个或更少。
在操作速度被限制到较低值的情况下,或者在沿着铁轨220的较低频率的测量是可接受的情况下,可以使用低于3000帧每秒的采样速率。如果传感器阵列120SA利用具有10nsec脉冲宽度的每个传感器120S并且利用以1μsec间隔触发的单独传感器120S操作,则对于32传感器阵列的数据收集时间将是32μsec(其小于每个帧的333μsec时间的大约十分之一),这可以减少在当以240mph(大约300km/hr)行进时累积表示数据的帧时行进的距离。因此,通常可以采用较低的帧速率,同时仍然捕获铁轨220的适合的帧表示。
图5是图1至图1C的示例铁轨监测系统100的示例实施例的示意框图;
包括安装在铁轨车250上的距离测量传感器阵列120SA的监测系统100的一个或多个阵列向也与铁轨车250关联(例如,在监测系统100内或在铁轨车250上的其它地方)的处理器140提供轨道200的三维表示,并且特别是在它们相应视场(FOV)130内的其铁轨220的三维表示(测量数据)。处理器140处理测量数据并将其存储在关联的存储器装置144(通常是固态或磁盘硬盘驱动器)中。测量数据还可以存储在可移除存储器介质146(诸如数据存储装置、数据介质、存储器装置、USB存储棒、拇指驱动器、存储卡、光盘、CD ROM、硬盘驱动器、或其它便携式存储器装置146、或其任何组合)上,其可以被移除和传输以向位于远离铁轨车250的处理器170(例如远程处理器)提供测量数据。
也安装在铁轨车250上的是定位装置142(通常是GPS定位装置142),其基本上实时地向处理器140提供表示铁轨车250的位置的位置数据,所述处理器将位置数据和测量数据关联,例如,以地理标记测量数据。因为测量数据中表示的位置从位置数据中已知,并且与该测量数据关联(例如,利用其来地理标记),所以可以利用测量数据以找到已经测量的特定轨道和/或铁轨(例如,轨道、铁轨或其方面),和/或以创建针对任何期望段或地理上定义区段的沿着铁轨220段的状况的轮廓。
定位装置142可以是单个GPS装置或冗余的GPS装置,和/或可以利用两个或更多个不同的且独立的全球定位系统(例如,US GPS系统、俄罗斯GLONASS系统、欧洲Galileo系统、印度IRNSS系统和/或中国BDS系统),使得即使当一个GPS系统在范围之外或在服务之外时,地理位置数据也是可用的,然而,此类冗余在任何特定实例中可能不是必需的或可负担的。
优选地,表示在其处获取测量数据的时间的时间数据也与测量数据关联,使得其位置和时间两者是已知的。时间数据可以从GPS定位装置142,或者从与铁轨车250(例如,其发动机控制系统)或与处理器140关联的时间标准获取。通常,地理标记的数据包括关联的位置和日期-时间戳(例如,其获取的日期和时间)两者,除非以其它方式明确陈述。
GPS装置142还提供速度的指示,其是位置的改变速率,它可以用于(如果需要)减少由于GPS装置142的处理时间(例如,接收GPS卫星信号的时间与从其导出并呈现位置数据的时间之间的时间)引起的位置数据中的误差。然而,这通常不需要被采取,因为显著的轨道缺陷通常不局限于非常短的距离(例如,几英尺或几米),而是在数十英尺或数十米上出现(如果不是更长的距离的话),例如土壤和/或铁轨路基侵蚀和来自水或局部洪水的损坏。在任何情况下,给定可以从可用的地理标记的测量数据、位置数据和/或时间数据计算或至少估计此类误差的量级,则可以在足够的精度的情况下确定缺陷或其它特定状况的位置,以允许维护或修理人员快速找到此类位置。
距离测量传感器120可以提供可见光带中、红外光带中或其组合中的尺寸表示,和/或可以依据到所观察的对象的距离来映射测量数据,例如,如利用飞行时间距离测量传感器。此外,温度测量传感器(例如,在IR范围内感测的温度测量传感器),可以被采用以提供表示周围环境的温度以及铁轨和/或轨道的温度的温度数据。适合的IR温度传感器的一个示例是来自比利时的Melexis NV和新汉普希尔Nashua的Melexis,Inc.的可用的类型MLX90640感测装置,其具有32×24像素IR热感测阵列。IR温度感测装置可以被包括在铁轨监测系统100中,所述铁轨监测系统包括例如在TOF传感器120S、120SA的位置处或附近的距离测量传感器阵列120,并且优选地具有类似地指向朝向铁轨220的FOV。温度数据优选地被地理标记,并且可以提供铁轨相对于环境温度的温度轮廓。
铁轨车250滚动时的振动(例如,从铁轨、车轮、轴颈轴承和/或其它不规则引起的振动)可以从由距离测量传感器120S、120SA产生的尺寸表示监测,或者从耦合到处理器140的振动传感器监测,例如,其中装置142包括除了位置传感器之外的一个或多个传感器,从而提供可以指示对检查和/或修理的需要的进一步的指示。
在前述示例中的任何示例中,距离测量传感器120SA优选地在车轮280也附接到其的卡车260的一部分处附接到卡车260,而不是在其安装弹簧的部分上附接到卡车260,使得它们处于距铁轨220基本上固定的距离,例如大约100mm。结果,铁轨监测系统100和距离测量传感器120SA的定位相对于铁轨220是基本上固定的,并且因此距离测量传感器阵列120、120SA相对于铁轨220的相对小的移动不对由此进行的距离测量的精度或者对从此类测量进行的铁轨220中的磨损、变形和缺陷的确定的精度具有重要的不利影响。
备选地和/或附加地,可以提供传送器150和天线152,以将地理标记的距离测量数据和其它数据传递到远离铁轨车250的站点,在所述站点,例如在铁轨车250的行程结束时和/或在工作日或出行日结束时,由远程处理器170接收所述数据。在该实例中,在远程站点处的天线162和接收器160接收所传送的地理标记的测量数据,并将其耦合到处理器170。注意到,在双向通信是必需的或理想的情况下,传送器150和接收器160可以各自包括传送和接收能力两者,并且传送器150和/或接收器160可以是以其它方式在铁轨车250上存在的通信设备或其一部分,例如,如在铁轨车250是发动机或机车,或者可以与在铁轨车250上存在的其它设备(例如,GPS位置跟踪装置)共享的情况下。
备选地,远程站点可以在其中铁轨车所位于的设施处(例如在铁路调车场),或者可以远离铁轨车250许多英里或一陆地,处理器170可以经由便携式存储器介质146或经由接收器160接收地理标记的距离测量数据,并将该数据存储在存储器174中。处理器170又向输出装置180提供轨道200、铁轨220和/或铁轨紧固件230的所确定状况的指示和/或报告。在确定了缺陷或超出其公差状况的情况下,处理器170生成输出装置180向用户传递的其警报和/或警告通知。
输出装置180可以是产生物理文档的打印机、与用户电子装置(例如,具有适合的应用(“app”)的智能电话或平板电脑)通信的传送器、监视器或以人类可感知的形式显示数据的其它显示器、可听装置、视觉装置、或可以与此类数据的用户通信的任何其它装置。输出装置180可以包括针对不同用户位于不同位置处的多个输出装置180,例如,在用于由其人员使用的维护和修理设施中,在用于在其处的用户的操作中心中,在用于在其处的管理者的管理中心中,在用于其用户的特定人员和/或车辆上,或者与用于其用户的特定人员和/或车辆一起等,以及(可能甚至通常)其组合。附加地和/或可选地,输出装置180可以被包括在铁轨车250上的系统100中,如由输出装置180'所指示的。
为了向用户提供此类报告、警告等,由一个或多个距离测量传感器120产生的测量数据必须被分析、比较(例如与标准模板和/或尺寸比较)、进行计算、或者以其它方式处理,以确定测量数据与其相关的轨道200、铁轨220和/或紧固件230是否在可接受的限制内以及是否完整和未受损。此类处理可以全部或部分地通过距离测量传感器120内部的处理、通过铁轨车250上的处理器140、通过远程定位的处理器170、通过辅助处理器、或通过其任何组合来执行。
可选地,一个或多个相机120V可以被提供并且具有相应的视场,所述视场配置成在由距离测量传感器的一个或多个阵列120SA以其获取测量数据的基本上相同的位置和时间捕获铁轨220的视觉数据,即,图片或其它图像。视觉数据由处理器140处理,包括利用位置数据和时间/日期数据进行地理标记,并作为地理标记的视觉数据存储在存储器144中,以用于经由存储器媒体146、经由输出装置189'以与测量数据和其它数据(如图5的剩余部分图示的和本文中描述的)相像的方式传输。因此,由传感器阵列120SA和相机120V获取的测量数据通过位置数据和与其关联的日期/时间数据而相关,从而实现搜索相关的测量数据和视觉数据以用于评估和/或分析的目的。
注意到,来自相机120V的视觉数据不需要被分析以用于检测磨损和/或缺陷,但是可以简单地被存储,由此稍后可以使用其地理标记数据,例如通过要使用的(例如,由人观察的)位置和日期/时间,来检索所述视觉数据以帮助和/或改进对包含在由如描述的系统100生成的磨损和/或缺陷的报告中的铁轨220的状况的理解。以该方式,定性的视觉数据帮助(例如,澄清和理解)其处理的、部分处理的和/或未处理形式中的定量距离测量数据,如轨道工程师或分析员可能发现有帮助的。
测量数据、地理标记的测量数据、位置数据、来自其的处理数据等优选地以可搜索的关系数据库存储在存储器144中、在存储器介质146中、在存储器174中和/在或其它存储器装置中,从所述可搜索的关系数据库可以容易地访问和检索数据,以用于基于一个或多个用户定义的搜索标准来处理、分析和/或报告。因为数据被地理标记,其包括表示在其处获取数据的日期和时间的日期-时间戳,并且通过其可以搜索和检索测量数据,可以执行历史分析,从而揭示趋势和类似性,并且揭示恶化状况,由此可以生成其报告,所述报告有助于铁路的管理和操作,所述铁路的轨道和铁轨由系统和设备100监测。
本文的通信可以经由无线通信、有线通信和/或光学通信中的任何一个或多个。其示例包括例如蜂窝通信系统、蜂窝基站和转发器系统、GSM蜂窝系统、GPRS蜂窝系统、无线通信、无线电通信、宽带链路、另一无线和/或蜂窝系统、因特网和/或另一网络、无线电通信系统、直接无线电通信、有线和/或光纤装置、无线电系统、WiFi网络、自组织网络、蓝牙、RFID装置、无线电网络、一个或多个转发器和/或中继、一个或多个陆线和/或光纤、卫星链路、因特网连接、LAN网络、WAN网络、或前述中的任何或所有中的任何组合。
图6A是示例铁轨轨头226的截面图,并且图6B是图示了其示例磨损状况的示例铁轨220的截面图;图7是图示了其不同铁轨磨损状况的示例的铁轨220段的透视图,并且图7A至图7D图示了铁轨220的各种距离测量。铁轨命名法在标称铁轨轨头226(例如,新的或已知良好铁轨(KGR)220)的截面图中指示,其中例如轨距侧是铁轨220的面向平行铁轨220的侧,并且田野(field)侧是背向轨道200的外侧,例如,到可以在轨道200旁边的“田野”(可能是最初的农场田野)中。轨道轨距TG是包括轨道200的两个铁轨220的相对轨距面之间的距离。
已知良好轨道(KGT)是例如具有以标准标称轨道轨距TGS的宽度间隔开的两个已知良好铁轨(KGR)的轨道。由于安装公差,即使新构造的轨道可能也不是完美KGT。为了在实践中具有KGT,例如针对系统100和/或距离测量阵列120的校准,可能要求使用新的KGR铁轨在非常小心的情况下构造此类轨道,以避免偏离标准标称轨道尺寸,并且以仔细地将此类轨道维持到靠近公差,如对于要用于轨道和/或铁轨测量装置的校准并且不用于其它列车操作的轨道区段可能进行的。
进一步地,铁轨轨头226的轨顶是卡车260的车轮280理想地在其上滚动的顶部中心区域,RCH是铁轨轨头的磨损的区域并且通常由经过的列车例如由滚动接触疲劳(RCF)周期性地施加应力,并且轨距面是在铁轨轨头226的内部的竖直表面,对所述竖直表面测量到平行铁轨的轨距面的轨道轨距。RCF的影响例如通常在弯道(其中来自通过的快速行驶列车的磨损和应力通常更大)上的外侧或高侧铁轨220的轨距侧上更常见。
如可能预期的,铁轨磨损沿着车轮280的滚动表面在其中滚动的轨顶和轨肩以及在上轨距拐角和下轨距拐角以及轨距面(在卡车260旋转并侧向移动时车轮的凸缘相对于其进行接触)上最大。示例磨损铁轨220W图示最初具有如以虚线(断线)示出的铁轨轨头轮廓的铁轨(即,已知良好铁轨(KGR))及基本上在有用服务的限制处以实线示出的磨损轮廓。铁轨220的轨顶和轨肩的最大竖直磨损VMW和最大轨距(水平)磨损GMW利用距铁轨220的基座222的顶部的竖直高度测量VMH的距离来测量,在其处测量VMW和GMW(距标称铁轨轨头尺寸的最大可接受减少)。
在如例如图6B中图示的极限磨损的实例中,铁轨轨头的轨顶和其轨距侧面两者磨损到相当大的程度。结果,剩余铁轨轨头中的应力相当大地增加,这增加了可能导致脱轨的铁轨故障(例如,断开或部分断开)的可能性。当轨距面磨损时,则轨道轨距增加该磨损的尺寸,进一步增加超出公差轨道轨距的可能性,例如,要求对检查、维护或修理的更立即的响应的可能性。
当铁轨轨头226变得磨损到其最大准许竖直磨损VMW和/或其最大准许轨距面磨损GMW和/或针对铁轨220的最小竖直高度VMH的程度时,这是铁轨处于要求其在其处替换的磨损水平的指示,例如,作为立即维护或修理优先级。在采用由在铁路轨道系统上有规律地行进的铁轨车携带的距离测量传感器120的阵列的本文中的铁路监测系统100的情况下,此类状况在短时间段上很少发生,因为测量数据的地理标记记录被有规律地(如果不是每日或更频繁的话)在系统关系数据库中获取并存储,使得它们可以随时间被监测和跟踪,并且当磨损增加时在铁路磨损程度达到VMW、VMH和/或GMW的限制之前被识别为维护和/或修理的候选。
从由铁轨监测系统100产生的测量数据中可检测的铁轨220中的缺陷的一些示例包括铁轨表面不规则性,例如波纹、铁轨轨头查验、拐角裂纹、剥落、脱落、蚀刻、下塌(squat)等、铁轨区段之间的过度间隙宽度以及铁轨磨损。在铁轨220内部的一些缺陷(例如由杂质、制造变化等引起的缺陷)可能表现为在它们产生灾难性的铁轨故障(例如,分离或断裂)之前从测量数据中可检测的外部扭曲或缺陷。
在X-Y方向上的距离测量传感器阵列120SA的测量之间的分辨率取决于从传感器阵列120SA到铁轨轨头226的距离以及取决于形成传感器阵列120S的距离测量传感器120S之间的接近度,例如间距。当传感器阵列120SA被放置在z轴(竖直或高度)方向上距铁轨轨头226100mm的示例优选距离D处时,当传感器阵列120SA在相邻行的距离测量传感器120S之间的偏移Ox为大约2mm(大约0.08英寸)的情况下被配置时在横向或X方向上(例如,横向于铁轨220段)的分辨率为大约2mm(大约0.08英寸),并且当传感器阵列120SA在相邻行的距离测量传感器120S之间的偏移Ox为大约1mm(大约0.04英寸)的情况下被配置时在横向或X方向上(例如,横向于所述铁轨220段)的分辨率为大约1mm(大约0.04英寸)。
在行进方向(例如,Y或纵向方向上)的测量之间的分辨率取决于距离测量传感器120S的采样速率的频率并且取决于距离测量传感器阵列120以其沿着轨道200移动的速度,例如,在其上携带距离测量系统120的列车的速度。一般地,较高的采样频率(速率)将成比例地产生每铁轨段更多的距离测量,并且因此较高的分辨率和较高的速度将成比例地产生每铁轨段更少的距离测量,以及因此在Y或行进方向上的较低分辨率。在典型的示例系统120中,传感器阵列120SA的采样速率可以例如在从100Hz帧速率(采样速率)到3,000Hz帧速率(采样速率)的范围内变化,并且系统120的行进速度(例如,携带系统120的列车的速度)可以从零变化到200或300km/小时或更大。
例如,在大约60mph(大约88英尺/秒或大约100km/小时)下,利用以1,000Hz采样速率(测量速率)操作的距离测量系统120,沿着铁轨220(即,在Y或行进方向上)的分辨率将是大约0.088英尺(大约27mm)。沿着铁轨的最高分辨率,例如在3000Hz测量速率下,将是大约0.029英尺(大约9mm)。较慢的行进速度将产生成比例更高的分辨率,例如在大约30mph下,Y方向分辨率将是大约5.5mm(大约0.21英寸),并且在大约15mph下,Y方向分辨率将是大约2.8mm(大约0.11英寸)。如果距离测量系统120以较高的3,000Hz采样速率(测量速率)操作,则沿着铁轨220(即,在Y方向上)的分辨率将在大约60mph下增加到大约0.029英尺(大约7.5mm)。当测量(采样速率与速度成比例地变化时,Y方向上的分辨率可以独立于速度维持在大约相同的分辨率。
注意到,沿着铁轨的Y方向上的前述分辨率值针对由距离测量传感器阵列120SA生成的距离测量数据的帧,并且Y方向上的在每个帧内的分辨率是帧分辨率的1/n,其中n是其阵列中距离测量传感器120S的行的数量。例如,如果传感器阵列120SA具有四行传感器120S,则n=4,并且例如0.029英尺(大约0.35英寸或大约9mm)分辨率实际上四倍更大,或者大约0.007英尺(大约0.088英寸或大约2.2mm),其充足精细以检测小缺陷(例如,不是大到是目前危险的缺陷),但是其可以指示随时间而观察的状况,以便在其变成显著危险之前实现检查和/或校正动作。
图7中图示的是下塌或剥落226S、轨头查验226HC、轨距拐角裂纹226HC、波纹226C和区段间隙226G。铁轨220的区段(例如,在美国为12或24m(大约39ft或78ft)长或在英国为20m(大约66ft)长可以通过穿孔钢板228(称为鱼尾板(英国)或称为接头杆(美国&加拿大))接合,从而在铁轨区段之间创建短间隙,或者铁轨区段可以端对端焊接在一起,以便形成长的连续铁轨。
在相对较小时,前述物理缺陷可以是良性的,然而随着它们增长到更大,它们变得更受关注。美国运输部,联邦铁路管理局,
在本示例实施例中,此类磨损和缺陷可以早在它们仍然相对小时被检测到,因为示例距离测量传感器120S的分辨率在竖直或z方向上是大约0.1mm(大约0.004英寸),其与当此类缺陷达到可能造成危险的铁轨故障的深度时的此类缺陷的尺寸相比精细得多。这促进监测磨损和缺陷随时间的大小的改变和/或稳定性,以便在实质上的危险的故障出现之前对其识别、计划和发起维护和/或修理。
同样地,在铁轨220处的距离测量传感器阵列120SA的示例实施例在宽度或横向(x)方向上的距离分辨率(例如,通常大约2mm(大约0.08英寸)),以及在纵向(y)方向上的距离分辨率(例如,通常大约9mm(大约0.35英寸)),足够精细以当磨损和缺陷太小而不能呈现显著风险的铁轨故障时,识别磨损和缺陷(例如,下塌和剥落226S、轨头查验226HC、轨距拐角裂纹226HC、波纹226C和区段间隙226G),并且监测此类磨损和缺陷的随时间的大小的改变和/或稳定性,以便在实质上的危险的故障出现之前对其识别、计划和发起维护和/或修理。
波纹可以具有沿着铁轨220的大约1”-3”(大约25-75mm)或长达3”-24”(大约73-600mm)的波长,通过比较在铁轨段上(例如,在纵向或y方向上)获得的超过波纹的波长的铁轨轨头226的连续表示(例如在竖直或z方向上)容易地检测到所述波纹。波纹在其最深点的宽度通常显著大于其最浅点的宽度,并且因此本距离测量系统100可以从波纹在高度(z方向)测量和/或宽度(x方向)测量上的差异来容易地检测波纹。
注意到,铁轨中的其它缺陷(无论是表面缺陷还是断开的铁轨)可以从本布置中确定,其中它们呈现为在沿着铁轨的相对短距离上发生的铁轨高度或其横向定位中的实质上的差异。断开的铁轨经常在其中断开的一侧比在其另一侧更大程度地竖直下沉,和/或在断开处彼此横向(水平)移位。
在图7A至图7D的示例中,其图示了从传感器阵列120SA到铁轨220的各种距离测量。在图示的示例中,铁轨的轨顶与传感器阵列120SA之间的距离D是例如大约100mm,并且其中表示的示例KGR具有大约70mm的铁轨轨头宽度WRH和大约140mm的高度。因此,在竖直或Z方向上的距离测量范围通常将超过大约2D(在本示例中),并且当以铁轨轨头为中心时,视场将在X方向上水平地延伸多于铁轨轨头宽度的一半的距离或中心线的每个侧上WRH/2的距离。
图7A是由传感器阵列120SA的一行距离测量传感器120S在横向或X方向上针对基本上已知良好铁轨(KGR)220提供的测量数据的示例的表示。其中到铁轨轨头226的轨顶或顶部的测量距离是大约100mm,并且当测量距离是到铁轨轨头226上的在铁轨轨头的中心的任一侧上的点时,测量距离逐渐增加。在其视场中不具有铁轨轨头226的任何传感器120S将一直向下测量到铁轨220的基座222,并且使得测量显著大于到铁轨轨头的测量,从而指示铁轨轨头的侧面在哪里,从其可以确定铁轨轨头的宽度WRH。
图7B是由传感器阵列120SA的一行距离测量传感器120S提供的在横向或X方向上针对相当大磨损的铁轨220(例如,如图6B中的铁轨)的测量数据的示例的表示。其中由于铁轨磨损,到铁轨轨头226的轨顶或顶部的测量距离大于D(例如,其中D为大约100mm),并且当测量的距离是到铁轨轨头226上的例如在铁轨轨头的中心的轨距侧上的更大磨损点时,测量距离进一步增加。因为在此示例中铁轨轨头的轨距侧被相当大地磨损,所以更大数量的传感器120S在其视场中不具有铁轨轨头226,并且因此一直向下测量到铁轨220的基座222,测量显著大于到铁轨轨头的测量,从而指示铁轨轨头的侧面在哪里,从其可以确定高度磨损铁轨轨头的相当大减少的宽度WRH。因此,从传感器阵列120SA到铁轨轨头226的测量距离与到KGR铁轨的测量距离的差异可以被处理,以确定和量化铁轨磨损并且识别和量化各种不同种类的过度磨损和/或铁轨缺陷。
图7C和7D是由传感器阵列120SA的一列距离测量传感器120S沿着铁轨220在纵向或Y方向上针对已经产生各种种类磨损和/或缺陷的铁轨220(例如,如图7中的铁轨)提供的示例系列测量数据的表示。其中由于铁轨磨损,到铁轨轨头226的轨顶或顶部的测量距离大于约100mm,并且当测量的距离是到铁轨220的更大磨损和/或缺陷的点时,测量距离进一步增加。通过处理此类测量数据,可以识别和量化铁轨磨损和缺陷。对于相对标尺,图7C中图示的距离测量表示沿着铁轨220的相对短的距离,例如可能十分之一或十分之二米,而图7D中图示的距离测量表示沿着铁轨220的相对较长的距离,例如可能半米或两米。
在图7C中从如其上携带距离监测系统100的铁轨车250沿着铁轨进行的一系列距离测量,通过一系列大得多的测量距离(例如,向下到铁轨220的基座222,或甚至到在铁轨轨头的中心的轨距侧上的铁轨路基205),指示铁轨220段之间的间隙226G。进一步地,来自多列传感器120S的距离测量数据可以被处理以确定所述间隙是例如铁轨220段之间的间隙226G(其是规则的并且基本上垂直地横向于所述铁轨220段),还是断开或断裂的铁轨220(其中所述断开可能是不规则的并且不可能是完全横向的)。
此外,如图7中图示的铁轨220中的若干拐角裂纹226CC在图7C中由沿着铁轨220进行的来自传感器阵列120SA的具有稍微更大距离226CC的一个或多个相邻距离测量的群组来表示,所述一个或多个相邻距离测量可以被处理以识别拐角裂纹226CC并量化其量级和严重性。类似地,如图7中图示的铁轨220中的铁轨轨头波纹226C在图7D中由沿着铁轨220进行的来自传感器阵列120SA的具有距离226CC的一系列距离测量表示,其至少在短距离上在某一度量的周期性规则性的情况下在距离中波动(例如,反映物理波纹),所述一系列距离测量可以被处理以识别波纹226C并且以量化其量级和严重性。此外,来自相邻列的距离测量传感器120S的距离测量数据可以被处理以附加地识别和量化波纹的宽度。
图8是图示由本文中描述的示例铁轨监测系统100执行的示例方法或过程800的示意流程图,并且图8A、图8B和图8C是图示其某些特征的细节的示意流程图。示例过程800通常以在铁轨车250上获得和安装805TOF距离测量系统100而开始。一般地,过程800包括校准800C系统100,操作系统100以通过使用例如TOF装置的阵列测量距离来获取800A距离测量数据,通过处理800P所获取的测量数据来确定轨道和铁轨的测量,从所述轨道和铁轨的测量可以确定铁轨磨损和缺陷,以及通过例如识别磨损和缺陷的超过、生成其报告、分析此类数据以确定改变、趋势和/或历史特性,从其生成报告、识别和发起校正动作(诸如检查、维护、修理、替换等)来执行铁路系统的管理800M。
如可能是方便和期望的,无论是如所获取的数据还是如部分和完全处理的数据的存储,都可以在过程800中的任何一个或多个地点和/或时间发生,并且优选地在其获取、处理和评估中的不同阶段处存储。类似地,如对于特定铁路或管理布置可能方便和/或期望的,过程800的前述方面800A、800P、800M可以全部或部分地以不同顺序和/或次序执行。
优选地,当距离测量数据被获取,并且位置数据和与其关联的时间数据保持与如所获取的以及如其在被处理的各个阶段处两者的距离数据关联时,距离测量数据被地理标记,从而促进关于位置、时间、量级、趋势、磨损程度、缺陷的存在和/或不存在等对原始和处理的距离测量数据两者的分析。
更详细地,示例过程800以在铁轨车上获得并安装805TOF距离测量系统100(例如,距离测量传感器120的一个或多个阵列和关联的设备)而开始。系统100的校准810遵循,优选地采用在已知良好轨道(KGT)配置中布置的已知良好铁轨(KGR)的物理实施例,或者通过其可以获得系统100的校准801的另一布置。
虽然过程800的某些步骤的顺序应该以预定顺序执行(例如,安装805和校准810系统100应该在操作系统100之前,并且获取840距离测量数据将在处理842等此类数据之前),但是在图示的示例实施例中的大多数步骤可以并且经常将以不同的顺序执行和/或可以并行执行。进一步地,在某一程度上,无论过程800配置成使用铁轨车250上的处理器140处理距离测量数据(例如,可能在数据被获取和被存储时),还是使用远程处理器170处理距离测量数据(例如,可能在数据被获取并被传送到处理器170时,或在稍后的时间),或其某种组合,牵涉此类处理器的各个步骤的次序和定时将相应地变化。
校准810系统100包括将现在在铁轨车上的距离测量系统100定位812在已知良好轨道(KGT)上,所述KGT包括一起用作参考或标准的已知良好铁轨(KGR),距离测量系统100相对于其进行校准。校准标准KGT轨道的长度可以是短的,例如,刚好充足长以接收在其上安装系统100的铁轨车,如可以足够以执行固定校准,或者可以具有足够的长度以允许在铁轨车250例如以一个或多个预定速度运动时校准,尽管KGT的长度的维护可能要求更多的维护以将其保持在KGR的标准内。
校准810包括测量KGR铁轨轨头的宽度814,测量816从铁轨轨头226的轨顶到在铁轨轨头226的边缘处的铁轨220的基座222距离,以及确定818铁轨轨头的轮廓,例如轨顶和向外到其边缘的横向形状。从前述测量812-818,可以确定从距离测量传感器阵列120SA到KGR 220的轨顶的实际距离D,并且该距离D可以被校正到其预定值,例如通过处理测量数据以确定距离D校准校正值,或者通过调整系统100在铁轨车250上的物理定位,使得物理距离D是预定的标称距离,例如100mm。前者负担较少,并且容易被考虑到后续测量数据的处理中,例如用于确定铁轨磨损。
在提供两个传感器阵列120SA的情况下,它们之间的距离通过它们的物理安装(例如,安装到铁轨车250的未安装弹簧的部分)而固定,并且可以容易地处理铁轨轨头226的轨距侧边缘在它们相应的视场内在横向或X方向上的相应定位,以从KGT测量和校准820轨道轨距。对任何不想要的与标称的偏差的调整可以经由计算因子或如上文的重新定位一个或两个阵列120SA而被移除。
所有测量数据被处理和存储822,例如以确定校准校正因子(例如,作为常数和/或作为系数),以用于距离测量数据的后续处理。此类校准校正优选地例如利用KGT校准轨道上的位置数据和获取此类数据的日期和时间进行地理标记,从而保存校准记录,所述校准记录可以存储在与铁轨车250上的处理器140关联的存储器144中和/或在与远程处理器170关联的存储器174中。
在校准810之后,校准系统100的操作830开始830。优选地,系统100仅在铁轨车移动时获取测量数据,以便不生成仅会消耗存储器和处理器容量的冗余数据。在操作中,测试列车是否正在移动832,并且如果不是832-否,则过程800重复循环到步骤830,直到检测到铁轨车250的移动832-是。一旦操作开始,就获取并处理距离测量数据840-895。然而,优选地,传感器阵列120SA以其采样以获取和测量距离数据的速率以预定方式可变(例如,与铁轨车250的操作速度成比例),以便避免多次测量铁轨轨头226的相同区域以及避免获取和处理冗余数据。
操作接下来进行到测量840-844距离测量数据。传感器阵列120SA例如通过飞行时间距离测量来获取840针对铁轨220的距离测量数据,并且距离测量数据被地理标记842,例如,与对于在其处获取此类数据的位置的位置数据及其日期和时间关联。地理标记的测量数据被存储844,例如,至少存储在与处理器140关联的存储器144中,并且如果操作被设置成其中数据实时被获取840和存储842并且要在稍后的时间被处理的模式,则跟着是还原842-是,以用于在铁轨车250的正在进行的行进期间重复循环测量数据获取830-844。如果期望测量数据的某一水平的相对立即的处理,或者如果没有选择具有延迟处理的模式,则操作不还原844-否,并且进行到处理846-880测量数据。
处理地理标记的距离测量数据以确定846铁轨轨头226的宽度,以确定848Z方向上的铁轨磨损,以确定850铁轨轨头226轮廓(例如,跨铁轨轨头226的宽度的铁轨磨损轮廓),以确定852铁轨220中是否存在间隙和/或断裂,以确定854轨道轨距(如果提供具有两个传感器阵列120SA的系统100),以确定856铁轨轨头磨损在限制之内或之外,以及以确定858是否存在任何铁轨缺陷。此类测量数据和确定846-858在这个点或稍后存储,例如步骤880。
测量数据和确定846-858可以并且优选地被处理以确定860-872是否已经确定了可报告的状况,例如磨损和/或缺陷。处理860测量数据以确定是否存在过度磨损,例如,在可允许公差之外的磨损。如果是860是,则生成其报告862,并且过程800继续;如果不是869-否,则过程800继续。
处理860测量数据以确定是否存在指示对检查、维护和/或修理的需要的过度磨损,例如,在可允许公差之外的磨损。如果磨损过度860-是,则生成其报告862,并且过程800继续;如果不是860-否,则过程800继续。
处理864测量数据以确定是否存在指示对检查、维护和/或修理的需要的铁轨缺陷,例如,超过可允许公差的拐角裂纹、剥落、间隙、断裂、波纹等。如果(一个或多个)缺陷过度864-是,则生成其报告866,并且过程800继续;如果不是864-否,则过程800继续。
处理870测量数据,以确定是否存在轨道缺陷,例如,在可允许公差之外的配置状况,例如,指示对检查、维护和/或修理的需要的轨距加宽。如果轨距加宽过度870-是,则生成其报告872,并且过程800继续;如果不是870-否,则过程800继续。
如果存在过度磨损860-是、过度缺陷864-是、和/或870-是,则可以进一步处理876其指示,以用于在存在例外的情况下提供实时确定和警报,例如,足够超出可接受限制的警报和/或工作命令应该快速和/或立即生成使得可以迅速处置过度状况的状况,例如,在其导致危险状况、出轨和/或其它事故、和/或对人或财产的损害之前,如下文描述的。
地理标记的距离测量数据、处理的距离测量数据、和/或生成的任何报告被存储880优选地存储在数据库中,使用一个或多个搜索状况和/或其组合可以容易地从所述数据库检索它们。关系数据库是通常适合用于存储和检索此类数据的一种数据库。前述处理846-880可以继续882-否,于是过程800返回到步骤830并且继续如描述地操作,直到达到对于结束操作的标准,例如,铁轨车250已经达到停止点或者针对天或其它时间段的其运行的结束。
如果过程810-880要在这个时刻结束882-是,则过程800可以进行到执行890对所存储的距离测量数据的各种分析(例如,通过时间和/或历史的分析、和/或通过位置的分析),以确定890铁轨220和轨道200的状况,以及铁轨220和/或轨道200的状况以其改变的速率。用于执行变化分析的此类自由使铁路操作员、管理者和/或所有者、或政府或其它监督或调查机构每当他们确定是必需的或理想的时监测铁轨和轨道状况,并且快速和精确地定位应该通过检查、维护和/或修理以及此类动作的定时来解决的状况,并且鉴于异常状况和/或缺陷的严重性来这样做,并且甚至在过度磨损和/或缺陷使继续操作太危险时限制操作和/或关闭轨道或线路。
因为体现在来自距离测量传感器阵列120SA的距离测量数据中的铁轨的每个表示被地理标记(即,每个表示具有与其关联的在其处获取测量数据的位置和在其处获取测量数据的时间(例如,日期和时间)),所以不仅可以从距离测量数据确定在特定位置和时间的铁轨磨损和缺陷,而且可以在特定轨道段上和/或在特定时间长度上评估铁轨状况,例如通过根据轨道、区段、位置、时间段等从距离测量数据的关系数据库中选择记录,从而辅助管理铁路相关实体可能期望或需要的铁轨和轨道检查、维护和修理的频率和定时和/或程度。
这种能力可以通过当此类数据被存储时或者在其后的一个或多个预定时间处,将测量数据的单独数据库记录与接受标准(例如,此类测量数据的元素必须在其内的限制)进行比较而自动化。能力还可以通过将满足例如时间、位置、轨道、线路等的预定记录搜索标准的测量数据与用于确定其中可能影响例如轨道和铁轨的铁路操作、检查、维护和修理的差异和趋势的指定的接受标准进行比较而自动化。
图8A和图8B是图示图8中图示的示例方法800的示例特征890和895的细节的示意性流程图。过程或方法800的过程或方法步骤890图示了用于准备时间和/或历史报告以及用于生成预测报告(例如,预测未来铁轨磨损、缺陷和轨道状况的报告)的示例细节。过程890可以从过程800的步骤882开始。选择标准被选择8902、8904、8906、8908,以用于控制在所述\关系数据库中的哪些数据记录要在搜索、处理和分析的范围内,这样做的顺序是不重要的。
步骤8902包括选择8902在其处或在其上要处理和评估距离测量数据的一个或多个时间,例如,特定时间或时间范围。步骤8904包括选择8904在其处或在其上要处理和评估距离测量数据的一个或多个位置,例如,特定位置或位置范围。步骤8906包括选择8906在其处或相对于其距离测量数据要被处理和比较以识别和确定铁轨磨损和铁轨缺陷的一个或多个磨损值,例如特定值或值范围。步骤8908包括选择8908在其处或相对于其用于轨道轨距(例如,轨道220的铁轨轨头226的内边缘之间的距离)的距离测量数据要被处理和比较的一个或多个值或轨道轨距(例如,特定值或值范围),以识别和确定轨道轨距,例如,其中传感器阵列120SA被提供用于测量铁轨之间的此类距离。
过程890通过从关系数据库中检索8910针对所选择8902、8904的(一个或多个)时间和/或(一个或多个)位置的测量距离数据,并通过将检索到的距离测量数据与所选择8906的铁轨磨损和/或缺陷值和/或所选择8908的轨道轨距值进行比较8912而继续。如果8914检索到的铁轨磨损和/或缺陷和/或轨道轨距值在所选择8906的铁轨磨损和缺陷值以及所选择8908的轨道轨距值的限制内,则过程890重复8914-是步骤8910、8912,直到检索到并比较满足搜索标准的检索8910和比较8912。如果8914检索到的铁轨磨损和/或缺陷和/或轨道轨距值中的任何项不在所选择8906的铁轨磨损和缺陷值以及所选择8908的轨道轨距值的限制内,则过程890通过创建8916对于超出限制状况的报告记录而继续,并将该报告记录存储8918在关系数据库中,例如,如果数据库如此配置,则存储在其报告区段中。
当8920满足选择标准的所有记录已被检索8910和比较8912,并且报告记录被创建8916和存储8916时,则8920-是针对所有报告记录的时间和/或历史报告被生成8922。如果8920否,则8920-否进一步执行检索88910和比较8912直到所有被完成。如果期望,过程890可以返回到过程800的步骤895。
然而,如果对检索的测量数据的进一步处理是期望的,则过程890进行到用户定义8924预测时间,在所述预测时间上可以执行预测分析8926、8928、8930。分析历史数据(例如,超出限制报告记录)以例如使用回归、曲线拟合或其它建模工具或方法对其中的历史数据的改变和趋势建模8926。然后,历史数据8922基于未来磨损、缺陷和轨距加宽以其历史数据中所见的速率继续的推测(其通常是有效的推测),使用其模型8926来处理,以将历史数据在时间上向前延伸或推断8928到预测时间,例如未来的时间。在过程890返回到过程800的步骤895之前,生成8930(一个或多个)预测报告。
结果,铁轨磨损、铁轨缺陷(例如,其大小和/或数量)和/或轨道轨距改变(例如,轨距加宽)的产生和/或增加的历史,用于预测其值未来可能变成什么值,这使预测数据能够通知对受影响的铁轨和/或轨道的检查、维护和/或修理和/或替换的计划和实现。因为位置是用于过程890的选择标准的一部分,所以例如,在更频繁的基础上和/或利用不同的磨损和/或缺陷选择标准,可以容易地监测对于经历较高的磨损率和/或缺陷率和/或轨道加宽已知或预期的位置。此外,与历史模式和/或趋势的任何偏差可以指示应该在比正常更紧急的基础上处理的非预期状况或铁轨/轨道故障。
过程或方法800的过程或方法步骤895图示了用于准备报告和校正动作以及用于生成其预测报告(例如,预测需要采取校正动作的未来铁轨磨损、缺陷和轨道状况的报告)的示例细节。过程895可以从过程800的步骤890开始要被包括在过程895中的选择8952(一个或多个)时间和选择8954(一个或多个)位置以及选择8956要由过程895应用的标准。报告标准可以是例如磨损、缺陷和/或轨距加宽的水平或阈值,或具有存在解决满足或超过阈值标准的那些状况的迫切需要的足够的比重(gravity)的其它状况。
使用搜索标准(例如,所选择的(一个或多个)时间、(一个或多个)位置和标准),过程895检索8958所存储的记录的其地理标记的距离测量数据满足搜索标准的记录,并将所检索的报告记录与动作标准进行比较8960。如果8962记录的数据在可允许的标准内(例如,不是迫切需要),则8962-是过程895返回到步骤8958以检索附加的记录用于比较。如果8962记录的数据不在可允许的标准内(例如,是迫切需要),则8962-否过程895进行到步骤8964。
其中将包含在检索到的记录中的在对表示对于要采取的动作(例如,校正动作)的优先级水平的各种阈值的可接受性限制(标准)之外的距离测量数据与例如被给出对于校正动作的更高的优先级的呈现更大风险或危险的那些进行比较8964。从那些比较8964中,利用适当的相应优先级创建8966校正动作指令或命令以用于实现。一般地,与磨损、缺陷和/或轨距加宽的可接受水平的偏差越大,则优先级越高,并且针对要采取此类动作所调度的时间越短。
根据它们相应的优先级提供8968(例如,生成)校正动作指令或命令以用于实现。提供8968的校正动作可以包括例如根据各种时间调度和截止时间(包括例如,立即、在指定天数、周数或月数内)的检查、维护、校正、修理、替换、重建等,并且可以在从最不紧急(例如,在未来监测)到最紧急(例如,减速和/或关闭轨道)的极限范围内,直到完成所述动作。虽然系统100配置成具有用于产生8968这些校正动作并自动发出必需命令的能力,但是介入人工审查作为提供8968步骤的一部分(例如,作为其监督和/或验证)可以是期望的。
在至此描述的程度上,过程895在某一很大程度上是反应过程,例如,它通过由在沿着轨道的系统行进的所调度或所选择的列车上携带的系统100所提供的到铁轨距离的测量系统,并且通过对那些记录的调度、预编程和/或手动搜索,对已经获取并存储在系统存储器中(例如,在一个或多个关系数据库中)的累积的地理标记的距离测量数据进行反应。该能力被认为超过了通过现有技术系统目前可用的能力,然而,系统100可以被采用来预测未来的状况和对检查、维护、修理等的需要。
然而,如果期望对所检索的地理标记的测量数据的进一步处理,则过程895进行到用户定义8970预测时间,在所述预测时间上可以执行预测分析8972、8974、8976。分析历史数据(例如,要求动作8966、8968的超出限制报告记录),以例如使用回归、曲线拟合或其它建模工具或方法对其中的历史数据的改变和趋势进行建模8972。然后,历史数据8966、8968基于未来磨损、缺陷和轨距加宽以其历史数据中所见的速率继续的推测(其通常是有效的推测),使用其模型8972来处理,以将历史数据在时间上向前延伸或推断8974到预测时间,例如未来的时间。在过程895返回到“A”(其是过程800的步骤830)之前,生成8930(一个或多个)预测报告。
结果,超过可接受的限制(例如,安全限制)的铁轨磨损、铁轨缺陷(例如,其大小和/或数量)和/或轨道轨距改变(例如,轨距加宽)的产生和/或增加的历史,用于预测其值未来可能变成什么值,这使预测数据能够通知对受影响的铁轨和/或轨道的检查、维护和/或修理和/或替换的校正动作的计划、优先化和/或实现。因为位置的选择8954是用于过程895的选择标准的一部分,所以例如,在更频繁的基础上和/或利用不同的磨损和/或缺陷选择标准,可以容易地监测对于经历较高的磨损率和/或缺陷率和/或轨道加宽已知或预期的位置。此外,与历史模式和/或趋势的任何偏差可以指示应该在比正常更紧急的基础上处理的非预期状况或铁轨/轨道故障,例如,轨道的道碴或基座205的劣化或故障。
图8C是图示图8的示例方法800的另一示例特征876的细节的示意性流程图。如描述的,系统100和方法800可以以“实时”或延迟处理方式操作。在以延迟处理方式的操作中,系统100可以在携带系统100、120的铁轨车的操作期间测量和累积距离测量数据,并且可以在其被收集时、在运行或一天的操作完成时、或者使用另一时间基础向远程站点传送该数据。
超过其被地理标记和存储的被地理标记的距离测量数据当其由处理器140获取时的处理可以由在铁轨车上携带的系统100的处理器140执行,或者由远程站点处的处理器170执行,或者由处理器140、170两者执行,并且处理器140和/或170可以在接收到数据时执行该处理,例如,“实时”或在稍后时间。在此类实例中,无论期望的程度如何,可以经由输出装置180或经由铁轨车上的输出装置180'将获取的数据和/或处理的数据提供到用户,例如铁路操作员或管理者,或者铁轨维护和/或修理组织,和/或提供到操作人员。
过程876图示了用于实时操作以确定何时测量过度磨损和/或缺陷和/或加宽,以及还实时响应于其而生成警报和/或工作命令的过程800的一部分的示例。过程876可以由携带系统100、120的铁轨车上的处理器140执行,并且从其直接传送180'到可以按此类警报和/或工作命令行动的一个或多个用户。示例过程876监测过程800的评估和报告部分,其中确定860-是、864-是、870-是过度磨损860、铁轨缺陷864和轨道缺陷870,以进一步监测和评估对于呈现更立即危险的磨损、缺陷和/或加宽的水平的那些状况。这是过程800中在其处确定存在过度磨损和/或缺陷的最早位置,无论过程800利用图示的步骤的示例顺序来执行还是利用其以不同顺序执行的步骤来执行。
针对过度磨损860、铁轨缺陷864和轨道缺陷870的水平定义8760、8768、8772的危险限制被建立,并且表示其中应该发起更迅速的(如果不是立即的)校正动作的状况。将在过程800中确定860-是、864-是、870-是的超出分别与和其对应的相应的定义的危险限制例如实时比较8762、8770、8774。对于没有超过或超出相应定义的危险限制的那些状况中的任何状况,过程876遵循否定的比较输出8762-否、8770-否、8774-否,以返回到处理800,例如在步骤880。
然而,当这些状况中的任何状况超过或超出定义的危险限制时,处理876遵循肯定的比较输出8762-是、8770-是、8774-是,以向例如铁路的管理者和/或操作员或者向检查、维护和/或修理其轨道的那些人传送8764危险警报。系统100、120还生成8766一个或多个工作命令,以发起必需的并且适于响应于超出确定存在的危险限制的磨损和/或缺陷状况的任何校正动作。注意到,不仅实时执行步骤8760至8766以解决潜在危险状况,而且因为距离测量数据被地理标记,过程876可以立即被指向到在其处确定存在此类状况的精确位置。
可选地,可以提供相机120V,相机120V观察正由系统100、120的距离测量传感器阵列120SA监测的铁轨,以提供利用相同的位置数据和时间数据地理标记的视觉数据,所述位置数据和时间数据也对由系统100、120产生的距离测量数据进行地理标记。相应地,该常见地理标记数据使视觉数据能够通过位置和时间与对应的距离测量数据相关。过程876可选地为审查8763此类视觉数据做准备,以用于通过由系统100执行的距离测量数据的处理来确认被确定为过度危险8762、8770、8774的状况。通常,具有适合培训和经验的人将执行视觉数据的审查8763,并且可以对由系统100产生8766的工作命令进行适当的添加、删除和改变。
注意到,前述监测和评估过程中的任何过程或所有过程可以被自动化、调度和/或编程,以在一个或多个预定时间、在有规律的时间、在变化或没有规律的时间、对于不同位置、对于具有类似性的位置(例如,高速弯道)、对于不同的磨损、缺陷和加宽值等执行,如在所述情形下可以认为是必需的或可取的。
用于检测和测量包括磨损缺陷、结构缺陷和铁轨轨道扭曲的程度的轨道缺陷的系统,其中铁轨具有铁轨轨头,所述铁轨轨头具有宽度和高度,所述系统包括:传感器阵列,其包括布置用于测量到铁轨轨头的距离以用于获得所述铁轨轨头的尺寸数据的多个飞行时间(TOF)距离测量传感器;其中所述传感器阵列配置成具有覆盖多于已知良好铁轨的铁轨轨头的宽度的一半并且覆盖在列车行进方向上沿着所述铁轨的预定距离的视场;其中所述传感器阵列的视场配置成具有所述传感器阵列的距离测量传感器中的每个的距离测量传感器光斑区域,所述距离测量传感器光斑区域配置成一起至少覆盖多于所述铁轨轨头的宽度的一半和在列车行进方向上沿着铁轨的预定距离,并且其中每个距离测量传感器的光斑区域被选择以与其它距离测量传感器的光斑区域中的其它光斑区域互补,以获得到视场内的铁轨轨头的距离测量数据;由此来自其的距离测量数据的阵列表示铁轨轨头宽度的和在列车行进方向上的所覆盖的区域,其中传感器阵列的距离测量传感器彼此同步以用于基本上同时地测量距离,并且其中来自其的尺寸数据通过与表示距离测量传感器在何处以及何时测量距离的位置和时间关联而被地理标记;存储器,其用于接收和存储包括关联的地理标记数据的距离测量数据;处理器,其用于处理到铁轨轨头的距离测量数据以确定铁轨轨头的至少包括相对于已知良好铁轨的铁轨轨头的宽度的所述铁轨轨头的宽度和相对于已知良好铁轨的铁轨轨头的高度的所述铁轨轨头的所述高度的尺寸数据,所述处理器处理所述尺寸数据以用于检测铁轨磨损和铁轨缺陷,其中操作传感器阵列以获得尺寸数据,从所述尺寸数据测量和检测铁轨磨损、表面缺陷、铁轨结构缺陷、铁轨断裂和裂纹、和/或铁轨中的接头中的间隙。传感器阵列可以配置成具有覆盖多于已知良好铁轨的铁轨轨头的宽度的视场。传感器阵列和处理器可以配置成确定包括铁轨的塑性流动的磨损和/或变形;或者传感器阵列和处理器可以配置成确定铁轨轨头与已知良好铁轨相比的包括其在竖直方向和水平方向上的磨损的厚度;或者传感器阵列和处理器可以配置成确定包括在竖直方向上的下塌、凹陷(palling)、波纹(corrugation)和变形的表面缺陷;或者传感器阵列和处理器可以配置成确定在铁轨接头处的间隙的尺寸和/或在至少两个铁轨接头段上的铁轨接头的尺寸的总和;或者前述中的任何一个或多个的任何组合。处理器可以配置成针对预定时间段检索距离测量数据,以用于在预定时间段上确定轨道和/或铁轨中的磨损率和/或缺陷率;或者处理器可以配置成针对预定时间段检索距离测量数据,以用于在预定时间段上确定轨道和/或铁轨中的磨损的历史和/或缺陷的历史;或者处理器可以配置成针对预定地理区域内的轨道和/或铁轨段检索距离测量数据,以用于确定预定地理区域上的轨道和/或铁轨中的磨损率和/或缺陷率;或者处理器可以配置成针对预定地理区域内的轨道和/或铁轨段检索距离测量数据,以用于确定预定地理区域上的轨道和/或铁轨中的磨损的历史和/或缺陷的历史;或者处理器可以配置成检索距离测量数据,以用于识别在预定时间段内要求检查、维护和/或修理的轨道和/或铁轨中的磨损和/或缺陷;或者处理器可以配置成检索距离测量数据,以用于识别在预定地理区域内要求检查、维护和/或修理的轨道和/或铁轨中的磨损和/或缺陷;或处理器可以配置成检索距离测量数据,以用于确定在预定时间段内已经要求检查、维护和/或修理的轨道和/或铁轨中的磨损率和/或缺陷率的历史;或者处理器可以配置成检索距离测量数据,以用于确定在预定地理区域内要求检查、维护和/或修理的轨道和/或铁轨中的磨损率和/或缺陷率的历史;或者前述中的任何一个或多个的任何组合。处理器可以配置成从所检索的距离测量数据确定轨道和/或铁轨中的磨损率和/或缺陷率的模型;以及处理器可以配置成应用所确定的模型来针对未来选择的预测时间推断针对轨道和/或铁轨中的磨损和/或缺陷的所检索的距离测量数据。传感器阵列可以是第一传感器阵列,并且系统可以进一步包括:第二传感器阵列,其包括布置用于测量到铁轨轨头的距离以用于获得铁轨轨头的尺寸数据的多个飞行时间(TOF)距离测量传感器,其中第二传感器阵列在功能上与第一传感器阵列相同,其中第一传感器阵列被定位以使轨道的第一铁轨在其视场内,并且第二传感器阵列被定位以使轨道的第二铁轨在其视场内;其中存储器用于接收和存储来自第二传感器阵列的包括关联的地理标记数据的距离测量数据。处理器可以处理来自第二传感器阵列的到第二铁轨的铁轨轨头的距离测量数据,以确定第二铁轨的铁轨轨头的至少包括相对于已知良好铁轨的铁轨轨头的宽度的其铁轨轨头的宽度和相对于已知良好铁轨的铁轨轨头的高度的第二铁轨的铁轨轨头的高度的尺寸数据,处理器处理尺寸数据,以用于检测第二铁轨的铁轨磨损和铁轨缺陷,其中操作第二传感器阵列以获得尺寸数据,从尺寸数据可以测量和检测铁轨磨损、表面缺陷、铁轨结构缺陷、铁轨断裂和裂纹、和/或铁轨中的接头中的间隙。处理器可以处理来自第一传感器阵列的到第一铁轨的铁轨轨头的距离测量数据和来自第二传感器阵列的到第二铁轨的铁轨轨头的距离测量数据,以确定相对于已知良好铁轨的轨距的包括第一铁轨和第二铁轨的轨道的轨距。传感器阵列的距离测量传感器可以被同步来以重复速率操作,所述重复速率与传感器阵列正以其在列车行进方向上移动的速度直接成比例。系统可以进一步包括:与传感器阵列关联的用于提供表示传感器阵列的视场内的铁轨的视觉数据的相机,其中视觉数据通过与表示距离测量传感器在何处以及何时测量距离的位置和时间关联而被地理标记。
用于检测和测量包括磨损缺陷、结构缺陷和铁轨轨道扭曲的程度的轨道缺陷的方法,其中铁轨具有铁轨轨头,铁轨轨头具有宽度和高度,所述方法包括:获得传感器阵列,所述传感器阵列包括布置用于测量到铁轨轨头的距离以用于获得铁轨轨头的尺寸数据的多个飞行时间(TOF)距离测量传感器;将传感器阵列配置成具有覆盖多于已知良好铁轨的铁轨轨头的宽度的一半以及覆盖在列车行进方向上沿着铁轨的预定距离的视场;将传感器阵列的视场配置成具有传感器阵列的距离测量传感器中的每个的距离测量传感器光斑区域,距离测量传感器光斑区域配置成一起至少覆盖多于铁轨轨头的宽度的一半和在列车行进方向上的预定距离,选择每个距离测量传感器的光斑区域以与其它距离测量传感器的光斑区域的其它光斑区域互补,以获得到视场内的到铁轨轨头的距离测量数据;由此来自其的距离测量数据表示铁轨轨头宽度的和在列车行进方向上的所覆盖的区域,使传感器阵列的距离测量传感器彼此同步以用于基本上同时测量距离,并且通过与表示距离测量传感器在何处以及何时测量距离的位置和时间关联来从其地理标记尺寸数据;接收和存储包括关联的地理标记数据的距离测量数据;处理到铁轨轨头的距离测量数据,以确定铁轨轨头的至少包括相对于已知良好铁轨的铁轨轨头的宽度的所述铁轨轨头的宽度以及相对于已知良好铁轨的铁轨轨头的高度的所述铁轨轨头的高度的尺寸数据,处理尺寸数据包括检测铁轨磨损和铁轨缺陷,所述方法操作传感器阵列以获得尺寸数据,从所述尺寸数据可以测量和检测铁轨磨损、表面缺陷、铁轨结构缺陷、铁轨断裂和裂纹、和/或铁轨中的接头中的间隙。所述方法可以包括将传感器阵列配置成具有覆盖多于已知良好铁轨的所述铁轨轨头的宽度的视场。所述方法可以包括:配置传感器阵列和处理器以确定包括铁轨的塑性流动的磨损和/或变形;或者配置传感器阵列和处理器以确定铁轨轨头与已知良好铁轨相比的包括其在竖直和水平方向上的磨损的厚度;或者配置传感器阵列和处理器以确定包括在竖直方向上的下塌、凹陷、波纹和变形的表面缺陷;或者配置传感器阵列和处理器以确定在铁轨接头处的间隙的尺寸和/或在至少两个铁轨接头段上的铁轨接头的尺寸的总和;或者前述中的任何一个或多个的任何组合。所述方法可以包括:将所述处理配置成针对预定时间段检索距离测量数据,以用于确定在预定时间段上轨道和/或铁轨中的磨损率和/或缺陷率;或者将所述处理配置成针对预定时间段检索距离测量数据,以用于确定在预定时间段上轨道和/或铁轨中的磨损的历史和/或缺陷的历史;或者将所述处理配置成针对预定地理区域内的轨道和/或铁轨段检索距离测量数据,以用于确定在预定地理区域上轨道和/或铁轨中的磨损率和/或缺陷率;或者将所述处理配置成针对预定地理区域内的轨道和/或铁轨段检索距离测量数据,以用于确定在预定地理区域上轨道和/或铁轨中的磨损的历史和/或缺陷的历史;或者将所述处理配置成检索距离测量数据,以用于识别在预定时间段内要求检查、维护和/或修理的轨道和/或铁轨中的磨损和/或缺陷;或者将所述处理配置成检索距离测量数据,以用于识别在预定地理区域内要求检查、维护和/或修理的轨道和/或铁轨中的磨损和/或缺陷;或者将所述处理配置成检索距离测量数据,以用于确定在预定时间段内已经要求检查、维护和/或修理的轨道和/或铁轨中的磨损率和/或缺陷率的历史;或者将所述处理配置成检索距离测量数据,以用于确定在预定地理区域内要求检查、维护和/或修理的轨道和/或铁轨中的磨损率和/或缺陷率的历史;或者前述中的任何一个或多个的任何组合。所述方法可以包括:将所述处理配置成从所检索的距离测量数据确定轨道和/或铁轨中的磨损率和/或缺陷率的模型;以及将所述处理配置成应用所确定的模型来针对未来选择的预测时间推断针对轨道和/或铁轨中的磨损和/或缺陷所检索的距离测量数据。所述方法可以包括:将传感器阵列校准到已知良好轨道和/或校准到已知良好铁轨。所述方法可以包括:配置传感器阵列和处理器以确定包括下塌、凹陷、波纹和变形的表面缺陷;或者配置传感器阵列和处理器以确定在铁轨接头处的间隙的尺寸和/或在至少两个铁轨接头段上的铁轨接头的尺寸的总和;或者配置传感器阵列和处理器以确定在预定时间段上的缺陷率;或者前述中的任何一个或多个的任何组合。所述方法可以进一步包括:获得第二传感器阵列,第二传感器阵列包括布置用于测量到铁轨轨头的距离以用于获得铁轨轨头的尺寸数据的多个飞行时间(TOF)距离测量传感器,其中第二传感器阵列在功能上与第一传感器阵列相同,将第一传感器阵列定位以使轨道的第一铁轨在其视场内,并且将第二传感器阵列定位以使轨道的第二铁轨在其视场内;其中所述接收和存储距离测量数据包括从第一传感器阵列和从第二传感器阵列接收和存储包括它们的关联的地理标记数据的距离测量数据。所述方法可以进一步包括:处理来自第二传感器阵列的到第二铁轨的铁轨轨头的距离测量数据,以确定第二铁轨的铁轨轨头的至少包括相对于已知良好铁轨的铁轨轨头的宽度的其铁轨轨头的宽度和相对于已知良好铁轨的铁轨轨头的高度的第二铁轨的铁轨轨头的高度的尺寸数据,以用于处理尺寸数据来检测第二铁轨的铁轨磨损和铁轨缺陷,以及操作第二传感器阵列以获得尺寸数据,从所述尺寸数据可以测量和检测铁轨磨损、表面缺陷、铁轨结构缺陷、铁轨断裂和裂纹、和/或铁轨中的接头中的间隙。其中使传感器阵列的距离测量传感器同步的方法包括:使传感器阵列的距离测量传感器同步,以用于以重复速率操作,所述重复速率可以与传感器阵列正以其在列车行进方向上移动的速度直接成比例。所述方法可以进一步包括:提供表示传感器阵列的视场内的铁轨轨头的视觉数据,以及通过将视觉数据与表示距离测量传感器在何处以及何时测量距离的位置和时间关联而地理标记视觉数据。
如本文中使用的,用语“大约”意味着尺寸、大小、配方、参数、形状和其它量和特性不是并且不需要是精确的,而是可以是近似的和/或更大或更小,如期望的,反映公差、转换因子、舍入、测量误差等,以及本领域技术人员已知的其它因子。一般地,尺寸、大小、配方、参数、形状或其它量或特性是“大约”或“近似”的,无论是否明确陈述如此。注意到,非常不同的大小、形状和尺寸的实施例可以采用所描述的布置。
尽管诸如“前”、“背”、“后”、“侧”、“端”、“顶”、“底”、“上”、“下”、“左”、“右”、“向上”、“向下”、“向前”、“向后”、“下方”和/或“上方”、“竖直”、“水平”等的用语在本文中可以用作方便地描述本布置的一个或多个实施例和/或使用,但是所描述的物品可以以任何期望的取向和/或可以以任何期望的定位和/或取向利用。定位和/或取向的此类用语应该被理解为仅是为了方便,而不是对如要求保护的本发明的限制。
如本文中使用的,用语“和/或”涵盖连接性和分离性情况两者,使得以形式“A和/或B”的短语涵盖“A”或“B”或“A和B”,以及以形式“A、B和/或C”的短语包括“A”、“B”、“C”、“A和B”、“A和C”、“B和C”以及“A和B和C”。
此外,用语一个或多个元件中的“至少一个”意图包括元件中的任何一个元件中的一个元件、元件中的任何元件中的多于一个元件、以及元件中的两个或更多个元件直到且包括所有元件,并且因此,例如,以形式“A、B和C中的至少一个”的短语包括“A”、“B”、“C”、“A和B”、“A和C”、“B和C”以及“A和B和C”。
如本文中使用的,用语“预定”意味着相对于用语所相关的任何事物提前或预先确定。任一用语可以相对于物理对象或事物和/或相对于无形事物(例如,信号或数据等)来使用。其示例可以包括固定值、定位、状况和/或限制,然而,预定不限于固定值、定位、状况和/或限制。预定值、定位、状况和/或限制可以随时间、随次序和/或随其它状况、系列值、定位和/或限制而改变或以其它方式变化。
如本文中使用的,用语“多个”意味着用语所相关的任何事物的数量的复数、两个或更多个,即,多于一个。用语可以相对于物理对象或事物和/或相对于无形事物(例如,信号或数据等)来使用。其示例可以包括固定的或可移动的事物、固定值、可改变值、定位、状况和/或限制等。
虽然过程或方法或操作的各种操作、步骤和/或元件可以以顺序或次序描述,但是操作、步骤和/或元件不需要以该顺序或次序或以任何特定顺序或次序执行,除非明确地陈述以要求特定顺序或次序。
如本文中使用的,用语“连接”和“耦合”以及其变化可以或可以不意图是精确的同义词,但是也可以涵盖一些类似的事物和一些不同的事物。如由其上下文指示的用语“连接”可以一般用于指具有到彼此的直接电气和/或物理接触的元件,而如由其上下文指示的用语“耦合”一般可以用于指例如经由一个或多个中间元件具有彼此间接电气和/或物理接触以便彼此协作和/或交互的元件,并且也可以包括直接接触的元件。
本布置可以并且优选地至少部分地被体现为一个或多个计算机实现的过程和/或用于执行此类一个或多个计算机实现的过程的设备,并且还可以体现在包含非暂时性计算机程序或其它机器可读指令(本文中“计算机程序”)的有形介质的形式中,其中当计算机程序被加载到计算机或其它处理器(本文中“计算机”)中和/或由计算机执行时,计算机变成用于实践一个或多个过程的设备。用于包含此类计算机程序的存储介质包括例如软盘和磁盘、致密盘(CD)-ROM(无论是否可写)、DVD数字盘、RAM和ROM存储器、计算机硬盘驱动器和备份驱动器、外部硬盘驱动器、“拇指”驱动器以及由计算机可读的任何其它非暂时性存储介质。一个或多个过程也可以体现在计算机程序的形式中,例如,无论是存储在存储介质中还是通过诸如电导体、光纤或其它光导体的传输介质,或者通过电磁辐射来传送,其中当计算机程序被加载到计算机中和/或由计算机执行时,计算机变成用于实践一个或多个过程的非暂时性设备。一个或多个过程可以在通用微处理器上或在专门配置成实践一个或多个过程的数字处理器上实现。当采用通用微处理器时,计算机程序代码配置微处理器的电路系统以创建特定的逻辑电路布置。由计算机可读的存储介质包括由计算机本身或由读取计算机指令的另一机器可读的介质,以用于向计算机提供那些指令以用于控制其操作。此类机器可以包括例如穿孔读卡器、磁带读取器、磁卡读取器、存储卡读取器、光学扫描器以及用于读取上文提到的存储介质的机器。
如本文中使用的,数据、图像和/或信息相对于由传感器和/或成像装置捕获和/或显示在显示装置上的内容可互换地使用,并且意图涵盖用户可能期望的各种各样装置中的任何装置和所有装置,包括但不限于视觉图像和图片、事物的表示,无论是静止的还是移动的,无论是由传感器、相机、计算机还是任何其它源捕获和/或生成的,无论是真实的、表示性的或抽象的或任意的,无论是否包括诸如字母数字字符或数学记号之类的符号或字符,无论是以黑白、单色、多色还是全色捕获和/或显示。
注意到,各种数据、传感器值和报警值可以表示不同地点和/或不同设备和/或安装、设施、位置、物品、运输工具、车辆、船只和/或其它地点的不同部分的实际物理状况(例如,一般为局部状况),其可以通过本文中所描述的系统和方法进行变换,以提供安装、设施、位置、物品、运输工具、车辆、船只和/或地点的总体状态和/或状况的表示,例如完整安装、设施、位置、运输工具、车辆、船只、物品和/或地点或其任何部分的表示。该表示可以是其标称总体状态和/或状况的表示(例如,在先前的或不同的状况和/或时间中的)到其实际总体状态和/或状况的表示(例如,在目前或更近或以其它方式不同的状况和/或时间中的)的变换。进一步地,所述系统和方法可以生成任务和命令,所述任务和命令被执行以将安装、设施、位置、运输工具、车辆、船只、物品和/或地点变换成不同的配置(即,变换成不同的安装、设施、位置、运输工具、车辆、船只、物品和/或地点),并且例如向人类操作员提供或显示该不同配置的表示。本文中描述的系统可以包括一个或多个通用和/或专用计算机,或微处理器或其它处理器,并且本文中描述的方法可以部分地由一个或多个通用和/或专用计算机,或微处理器或其它处理器来执行。
虽然已经依据前述示例实施例描述了本发明,但是在如由以下权利要求定义的本发明的范围和精神内的变化对于本领域技术人员将是明白的。例如,虽然描述了距离测量传感器的及其阵列的配置的示例,但是在本范围内可以采用依据传感器的数量及其物理布局和间距两者不同的距离测量传感器及为此不同的阵列配置。
虽然距离测量传感器阵列通常将包括在横轨(例如,x)方向上的多个距离测量传感器,以便在其视场内具有例如至少一半的标称铁轨轨头宽度,但是一个或多个距离测量传感器可以被包括在传感器阵列的沿着铁轨(例如,y)方向上。在沿着铁轨(例如y)方向上采用的距离测量传感器的数量将取决于例如铁轨车(系统100将在其上提供)的操作速度的预期范围和在沿着铁轨方向上的期望分辨率。
虽然一般地优选的是,在有规律操作的列车的机车或其它铁轨车上成对地采用铁轨监测系统100,其倾向于使用每天操作的列车在每天的基础上或以其它列车操作频率提供对轨道及其两个铁轨的监测;可以采用单个铁轨监测系统100而不脱离所描述和要求保护的内容。进一步地,如由铁路操作员、轨道所有者、维护或修理实体、检查实体、符合性验证实体等可以认为是期望的和方便的,一个或多个监测系统100可以在单独的铁轨检查车辆上,或在维护列车或修理列车上,或在运行要监测的轨道的其它车辆上,以及在有规律地操作的列车上采用。
虽然某些特征可以被描述为凸起特征,例如,脊、凸台、凸缘、突起、棘爪或其它凸起特征,但是此类特征可以是正形成的或者可以是在制成凹进特征(例如,凹槽、狭槽、洞、缺口、凹进、棘爪或其它凹进特征)之后剩下的特征。类似地,虽然某些特征可以被描述为凹进特征(例如,凹槽、狭槽、洞、缺口、凹进或其它凹进特征),但是此类特征可以是正形成的,或者可以是在制成凸起特征(例如,脊、凸台、凸缘、突起或其它凸起特征)之后剩下的特征。此外,在凸起特征接合凹进特征(例如,接合互补插座的圆柱形突起)的情况下,凸起和凹进特征的相对定位可以互换或以其它方式修改。
本文中识别的美国临时申请、美国专利申请和/或美国专利中的每个特此出于任何目的和出于所有目的,通过引用以整体并入本文中,而与其可能如何在本文中被提及或描述无关。
最后,陈述的数值是典型值或示例值,不是限制值,并且不排除实质上更大和/或实质上更小的值。任何给定实施例中的值可以实质上大于和/或可以实质上小于陈述的示例值或典型值。