一种伸缩变轴距六轮移动机器人
文献发布时间:2023-06-19 09:24:30
技术领域
本发明涉及机器人领域,具体地说是一种伸缩变轴距六轮移动机器人。
背景技术
由于人们对生活空间的不断探索以及对生活品质要求的不断提高,使得全地形移动机器人在工业、农业、医疗,服务等行业有了广阔的发展前景,另外全地形移动机器人在消防现场、地震、采矿救援等方面也有广泛应用。
现有技术中的全地形移动机器人主要包括:轮式、履带式、腿式、复合式(轮腿式、轮履式)等结构,其中轮式结构相比于其他形式具有结构简单、动作平稳、操控简单、速度和方向易于控制等优点。
全地形轮式移动机器人按轮数分主要包括单轮、三轮、四轮、六轮以及多轮,其中以四轮与六轮居多。四轮全地形移动机器人结构简单,但越障能力有限,六轮运用于月球车居多,现多采用摇臂式吊式结构,六个轮子独立控制,具有较强的跨越崎岖障碍和爬坡能力,但是其运动速度慢、重心高、轮距无法调整,无法适应复杂路面对于六轮之间距离适应改变的要求。
发明内容
本发明的目的在于提供一种伸缩变轴距六轮移动机器人,能够实现前车体和后车体的变距调节,适合非结构地形路面作业,并且后车体同侧两轮通过对应侧的扭簧组件被动分配机构动力,能够有效保证动力均匀分配,提高运动平稳性和运动的快速性。
本发明的目的是通过以下技术方案来实现的:
一种伸缩变轴距六轮移动机器人,包括前车体、后车体、伸缩组件、摇臂组件、扭簧组件和车轮组件,所述伸缩组件包括导向管、伸缩管和电磁铁,导向管固设于所述后车体中,伸缩管可移动地设于所述导向管中且前端与所述前车体固连,所述导向管和伸缩管上均设有限位插孔,所述电磁铁上设有可弹出的限位柱,且所述电磁铁限位柱依次穿过导向管上的限位插孔和伸缩管上的限位插孔实现伸缩管限位,所述前车体两侧各设有一个车轮组件,所述后车体两侧均设有摇臂组件,所述摇臂组件包括摇臂转轴和摇臂,所述摇臂转轴一端安装于所述后车体上,另一端与所述摇臂中部固连,所述摇臂两端各设有一个车轮组件,所述摇臂转轴两侧均设有扭簧组件,且所述扭簧组件一端与摇臂转轴相连,另一端与后车体相连。
所述导向管和伸缩管之间为间隙配合,并且所述限位插孔为弧形长孔。
所述伸缩组件中的导向管前端设有导向管前固定座固装于后车体前端内壁上,所述导向管后端设有导向管后固定座固装于后车体后端内壁上,所述伸缩管前端设有伸缩管前固定座固装于前车体后端外壁上。
所述伸缩管前固定座和导向管前固定座上均设有供所述电磁铁限位柱穿过的限位插孔。
所述摇臂组件包括摇臂、摇臂转轴和转轴支座,其中转轴支座设于后车体上,摇臂转轴后端安装于所述转轴支座中、前端与所述摇臂中部固连,在所述摇臂转轴上设有一个连接板,所述扭簧组件一端与所述连接板相连。
所述转轴支座包括轴承座、第一轴承、第二轴承、轴承端盖和转轴固定件,第一轴承和第二轴承分别安装于所述轴承座两端,轴承端盖设于所述轴承座前端,并且所述轴承端盖和所述轴承座前端通过螺栓固装于后车体上,所述转轴固定件设于所述轴承座后侧,并且所述摇臂转轴后端穿过所述轴承端盖、第二轴承、轴承座和第一轴承后与所述转轴固定件固连。
所述扭簧组件包括扭簧、前螺栓、前固定件、后螺栓和后固定件,其中扭簧一端通过所述前螺栓安装于后车体上,另一端通过所述后螺栓与所述摇臂转轴相连,所述前固定件套装于前螺栓上,且所述前固定件上设有限定所述扭簧端部沿着所述前螺栓轴向位移的卡口,所述后固定件套装于所述后螺栓上,且所述后固定件上设有限定所述扭簧端部沿着所述后螺栓轴向位移的卡口。
所述车轮组件包括车轮电机和车轮,所述车轮通过所述车轮电机驱动旋转,前车体上的车轮电机安装于前车体侧壁上,后车体上的车轮电机安装于所述摇臂的对应端部,所述车轮电机外侧设有电机护罩。
本发明的优点与积极效果为:
1、本发明利用伸缩组件实现前车体和后车体的变距调节,车体距离确定后通过伸缩组件中的电磁铁实现伸缩管限位,进而使两车体转变为固定间距,并且所述伸缩管具有一定的摆动角度,可随前车体摆动适应颠簸路面,另外限位插孔也为具有一定圆心角度的弧形长孔,具有足够余量满足颠簸带来的自适应转动,从而使本发明能够在非结构地形路面作业,在越障性能、防倾覆性能、灵活性能、平顺性方面都有很好的发挥。
2、本发明后车体同侧两轮通过对应侧的扭簧组件被动分配机构动力,相对于传统后四轮采用的悬臂机构以及六轮独立驱动的形式,能够有效保证动力均匀分配,提高运动平稳性和运动的快速性。
附图说明
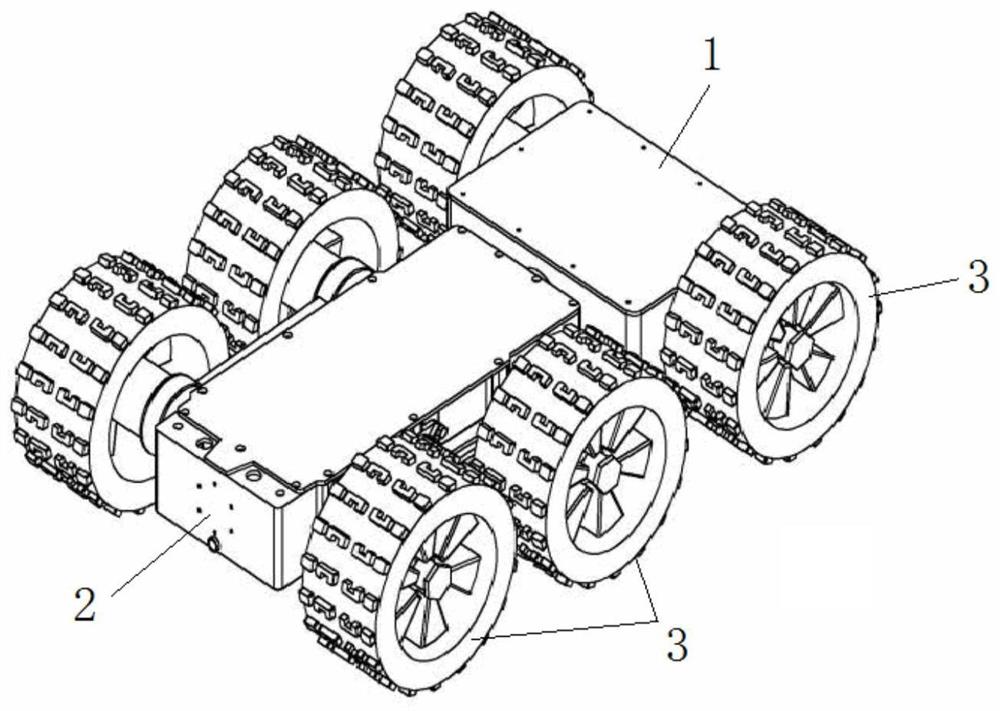
图1为本发明的立体示意图,
图2为本发明的俯视图,
图3为图2中本发明去掉车体上盖后的示意图,
图4为图3中的A-A视图,
图5为图3本发明前部放大图,
图6为图3中的伸缩组件示意图,
图7为图3中的摇臂组件示意图,
图8为图7中的转轴支座爆炸示意图,
图9为图3中的扭簧组件放大示意图,
图10为图9中的扭簧组件示意图,
图11为图10中的扭簧组件分解示意图,
其中,1为前车体,2为后车体,3为车轮组件,301为电机护罩,302为车轮,303为车轮电机,4为摇臂组件,401为摇臂转轴,402为摇臂,403为盖板,404为连接板,405为转轴支座,4051为转轴固定件,4052为第一轴承,4053为轴承座,4054为螺栓,4055为轴承端盖,4056为第二轴承,5为伸缩组件,501为导向管前固定座,502为伸缩管,503为伸缩管前固定座,504为电磁铁,505为导向管,506为导向管后固定座,507为限位插孔,508为连接孔,6为扭簧组件,601为扭簧,602为前螺栓,603为前固定件,604为后螺栓,605为后固定件。
具体实施方式
下面结合附图对本发明作进一步详述。
如图1~11所示,本发明包括前车体1、后车体2、伸缩组件5、摇臂组件4、扭簧组件6和车轮组件3,其中如图3~6所示,所述伸缩组件5包括导向管505、伸缩管502和电磁铁504,所述导向管505固设于所述后车体2中,所述伸缩管502可移动地设于所述导向管505中且前端与所述前车体1固连,所述导向管505和伸缩管502上均设有限位插孔507,所述电磁铁504上设有通电弹出的限位柱,且所述电磁铁504限位柱依次穿过导向管505上的限位插孔507和伸缩管502上的限位插孔507实现伸缩管502限位,所述前车体1两侧各设有一个车轮组件3,如图3和图7所示,所述后车体2两侧均设有摇臂组件4,所述摇臂组件4包括摇臂转轴401和摇臂402,所述摇臂转轴401一端安装于所述后车体2上,另一端与所述摇臂402中部固连,所述摇臂402两端各设有一个车轮组件3,如图3所示,所述摇臂转轴401两侧均设有扭簧组件6,且所述扭簧组件6一端与摇臂转轴401相连,另一端与后车体2相连。
如图3~6所示,所述伸缩组件5中的导向管505前端设有导向管前固定座501,且所述导向管前固定座501固装于后车体2前端内壁上,所述导向管505后端设有导向管后固定座506,且所述导向管后固定座506固装于后车体2后端内壁上,所述伸缩管502前端设有伸缩管前固定座503,且所述伸缩管前固定座503固装于前车体1后端外壁上。
如图6所示,所述伸缩管前固定座503和导向管后固定座506上均设有连接孔508,所述伸缩管502前端和导向管505后端分别通过销钉插入所述连接孔508中实现与所述伸缩管前固定座503和导向管后固定座506连接。另外所述伸缩管前固定座503和导向管前固定座501上均设有限位插孔507配合所述电磁铁504的限位柱插入。
当前车体1左右两轮和后车体2四轮形成速度差且所述电磁铁504上的限位柱不弹出时,伸缩管502可在导向管505内伸缩移动,从而实现变轴距,再通过控制电磁铁504上的限位柱弹出插入相应的限位插孔507中实现伸缩组件5长度变化限定,使前车体1和后车体2保持固定轴距。
如图6所示,所述导向管505和伸缩管502之间为间隙配合,并且所述限位插孔507为具有一定的圆心角度的弧形长孔,当路面颠簸时,前车体1两轮先接触路面变化,会有一定起伏,导致前车体1有一定摆动,进而带动伸缩管502在导向管505内有一定幅度摆动,另外由于所述限位插孔507为弧形长孔,即使所述电磁铁504限位柱弹出限位的情况下,所述限位插孔507上下也有足够余量满足这种颠簸带来的自适应转动。
本实施例中,所述电磁铁504为推拉式小微型直流电磁铁,此为本领域公知技术且为市购产品。
如图3和图7所示,所述摇臂组件4包括摇臂402、摇臂转轴401和转轴支座405,其中转轴支座405设于后车体2上,摇臂转轴401后端安装于所述转轴支座405中、前端与所述摇臂402中部固连,如图9所示,在所述摇臂转轴401上设有一个呈六边形的连接板404,所述扭簧组件6一端与所述连接板404相连。
如图8所示,所述转轴支座405包括轴承座4053、第一轴承4052、第二轴承4056、轴承端盖4055和转轴固定件4051,第一轴承4052和第二轴承4056分别安装于所述轴承座4053两端,轴承端盖4055设于所述轴承座4053前端并限定所述第二轴承4056轴向位移,并且所述轴承端盖4055和所述轴承座4053前端四角通过螺栓4054固装于后车体2上,所述转轴固定件4051设于所述轴承座4053后侧,并且所述摇臂转轴401后端穿过所述轴承端盖4055、第二轴承4056、轴承座4053和第一轴承4052后与所述转轴固定件4051固连,所述转轴固定件4051随摇臂转轴401转动并限定所述第一轴承4052轴向位移。
如图9~11所示,所述扭簧组件6包括扭簧601、前螺栓602、前固定件603、后螺栓604和后固定件605,其中扭簧601一端通过所述前螺栓602安装于后车体2上,另一端通过所述后螺栓604与所述摇臂转轴401上的连接板404相连,所述前固定件603套装于前螺栓602上且设于前螺栓602的螺帽与后车体2的外壁之间,所述前固定件603上设有卡口限定所述扭簧601端部沿着所述前螺栓602的轴向位移,同样所述后固定件605套装于所述后螺栓604上且设于所述后螺栓604螺帽和所述连接板404之间,所述后固定件605上设有卡口限定所述扭簧601端部沿着所述后螺栓604轴向的位移。
如图5和图7所示,所述车轮组件3包括车轮电机303和车轮302,所述车轮302通过所述车轮电机303驱动旋转,其中前车体1上的车轮电机303安装于前车体1侧壁上,后车体2上的车轮电机303安装于所述摇臂402的对应端部,所述车轮电机303外侧设有电机护罩301。
本发明的工作原理为:
本发明工作时六个车轮302可以同时与地面接触,以适应非结构性路面的地理环境,而本发明伸缩组件5中的伸缩管502可以伸缩实现前车体1和后车体2变距的同时,也可以随前车体1实现一定角度摆动,实现类似于车体悬架效用。本发明的后车体2的四个车轮组件3中,同侧两轮连接于一侧的悬臂组件4上,并且通过对应侧扭簧组件6中的扭簧601被动分配机构动力,相对于传统后四轮采用的悬臂机构以及六轮独立驱动的形式,本发明能够有效保证动力均匀分配,提高运动平稳性和运动的快速性。