辅助驾驶的控制方法、车辆及计算机可读存储介质
文献发布时间:2023-06-19 13:48:08
技术领域
本发明涉及辅助驾驶技术领域,具体涉及一种辅助驾驶的控制方法、车辆及计算机可读存储介质。
背景技术
近年来,随着电动汽车的辅助驾驶系统(Advanced Driving Assistance System,简称ADAS)的配置率逐渐提高,目前电动汽车的辅助驾驶控制方法为:在辅助驾驶系统激活的条件下,电子稳定控制器(Electronic Stability Control,简称ESC)接收辅助驾驶系统的速度、加速度等请求,并经过计算转换成扭矩请求,将该扭矩请求发送至整车控制器(Vehicle Control Unit,简称VCU),整车控制器响应电子稳定控制器的扭矩请求,将该扭矩请求输入至电机控制器,以使电机控制器控制电机根据该扭矩请求进行转动,从而实现辅助驾驶系统的功能控制。但是目前的该辅助驾驶控制方法,对于辅助驾驶系统的响应较慢,即车辆执行辅助驾驶系统下达的决策不够及时,从而导致车辆具有严重的安全隐患。因此,如何降低辅助驾驶系统的决策响应时延成为亟待解决的技术问题。
发明内容
本发明的主要目的是提供一种辅助驾驶的控制方法、车辆及计算机可读存储介质,旨在提高辅助驾驶系统的决策响应速度。
为实现上述目的,本发明提供一种辅助驾驶的控制方法,该方法包括:
确定辅助驾驶系统当前所激活的辅助驾驶模式;
控制辅助驾驶系统发送所述辅助驾驶模式对应的理论引导值至整车控制器;
控制整车控制器接收所述理论引导值,并确定所述理论引导值对应的目标扭矩;
根据所述目标扭矩控制电机转动,以引导车辆根据所述理论引导值行驶。
进一步地,所述根据所述目标扭矩控制电机转动的步骤之后包括:
按预设周期检测当前车辆的实际引导值,得到第一实际引导值、第二实际引导值和第三实际引导值,其中,所述第一实际引导值为当前周期检测的实际引导值,所述第二实际引导值和所述第三实际引导值为当前周期的前两次周期检测的实际引导值,所述第二实际引导值的检测时间在所述第三实际引导值的检测时间之后;
根据所述第三实际引导值对所述第二实际引导值进行低通滤波处理,得到第一低通滤波引导值;
根据所述第一低通滤波引导值对所述第一实际引导值进行低通滤波处理,得到第二低通滤波引导值;
计算所述理论引导值和所述第二低通滤波引导值的引导差值;
确定所述引导差值对应的扭矩差值,并计算所述扭矩差值和所述目标扭矩的扭矩和值;
根据所述扭矩和值控制电机转动。
进一步地,所述根据所述扭矩和值控制电机转动的步骤包括:
基于所述目标扭矩对所述扭矩和值进行低通滤波处理,得到低通滤波扭矩;
根据所述低通滤波扭矩控制电机转动。
进一步地,所述控制辅助驾驶系统发送所述辅助驾驶模式对应的理论引导值至整车控制器的步骤之前包括:
判断激活的所述辅助驾驶模式是否为自动紧急制动模式;
若激活的所述辅助驾驶模式为自动紧急制动模式,则实时获取当前车辆的行驶环境信息,并发送行驶环境信息至电子稳定控制器;
控制电子稳定控制器根据所述行驶环境信息,判断预设距离内是否存在障碍物;
若确定预设距离内存在障碍物,则发送制动信号至车辆制动器;
控制所述车辆制动器接收所述制动信号,根据所述制动信号进行制动;
若激活的所述辅助驾驶模式不为自动紧急制动模式,则执行:所述控制辅助驾驶系统发送所述辅助驾驶模式对应的理论引导值至整车控制器的步骤。
进一步地,所述若激活的所述辅助驾驶模式不为自动紧急制动模式,则执行:所述控制辅助驾驶系统发送所述辅助驾驶模式对应的理论引导值至整车控制器的步骤包括:
若激活的所述辅助驾驶模式不为自动紧急制动模式,则判断激活的所述辅助驾驶模式是否为自适应巡航模式;
若激活的所述辅助驾驶模式为自适应巡航模式,则确定所述辅助驾驶模式对应的理论引导值为理论加速度值,并执行:所述控制辅助驾驶系统发送所述辅助驾驶模式对应的理论引导值至整车控制器的步骤。
进一步地,所述若激活的所述辅助驾驶模式不为自动紧急制动模式,则执行:所述控制辅助驾驶系统发送所述辅助驾驶模式对应的理论引导值至整车控制器的步骤包括:
若激活的所述辅助驾驶模式不为自动紧急制动模式,则判断激活的所述辅助驾驶模式是否为自动泊车模式;
若激活的所述辅助驾驶模式为自动泊车模式,则确定所述辅助驾驶模式对应的理论引导值为理论速度值,并执行:所述控制辅助驾驶系统发送所述辅助驾驶模式对应的理论引导值至整车控制器的步骤。
进一步地,所述确定辅助驾驶系统当前所激活的辅助驾驶模式的步骤之前包括:
判断辅助驾驶系统的功能是否预备正常;
若所述辅助驾驶系统的功能预备正常,则执行:所述确定辅助驾驶系统当前所激活的辅助驾驶模式的步骤。
进一步地,所述判断辅助驾驶系统的功能是否预备正常的步骤包括:
判断当前车辆是否处于上电状态、防抱死制动功能是否运行正常、电子稳定控制功能是否运行正常,以及车身控制功能是否运行正常;
所述若所述辅助驾驶系统的功能预备正常,则执行:所述确定辅助驾驶系统当前所激活的辅助驾驶模式的步骤包括:
若确定当前车辆处于上电状态、防抱死制动功能运行正常、电子稳定控制功能运行正常,以及车身控制功能运行正常,则执行:所述确定辅助驾驶系统当前所激活的辅助驾驶模式的步骤。
本发明提供了一种车辆,包括存储器、处理器、以及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述计算机程序被处理器执行时实现如上所述辅助驾驶的控制方法的步骤。
本发明还提供了一种计算机可读存储介质,所述计算机可读存储介质上存储有计算机程序,所述计算机程序被处理器执行时实现如上所述辅助驾驶的控制方法的步骤。
本发明通过辅助驾驶系统直接与整车控制器进行信息交互,辅助驾驶系统通过CAN(控制器局域网络,Controller Area Network)网络发送当前辅助驾驶模式对应的理论引导值至整车控制器,整车控制器通过扭矩控制算法将理论引导值转换为对应的目标扭矩,电机控制器根据该目标扭矩控制电机转动,实现了辅助驾驶系统的功能及性能要求。本发明在不需要电子稳定控制系统参与扭矩控制的情况下,辅助驾驶系统直接将行驶决策信息发送至整车控制器,减少了响应时延,加快执行辅助驾驶系统下达的行驶决策的效率,提高了辅助驾驶系统的决策响应速度,同时也避免了中间需要经过较多节点而导致的数据传输损失或数据运算误差等问题,提高数据处理和计算的准确性,实现辅助驾驶系统在不同辅助驾驶模式下的扭矩控制,提升响应精度。
附图说明
图1是本发明实施例车辆的模块结构示意图;
图2为本发明辅助驾驶的控制方法第一实施例的流程示意图;
图3为本发明辅助驾驶的控制方法第二实施例的部分流程示意图;
图4为本发明辅助驾驶的控制方法第三实施例的部分流程示意图;
图5为本发明辅助驾驶的控制方法第四实施例的部分流程示意图;
图6为本发明辅助驾驶的控制方法具体实施例一;
本发明目的的实现、功能特点及优点将结合实施例,参照附图做进一步说明。
具体实施方式
应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
请参照图1,图1为本发明各个实施例中所提供的车辆的模块结构示意图。所述车辆包括通信模块01、存储器02及处理器03等部件。本领域技术人员可以理解,图1中所示出的车辆还可以包括比图示更多或更少的部件,或者组合某些部件,或者不同的部件布置。其中,所述处理器03分别与所述存储器02和所述通信模块01连接,所述存储器02上存储有计算机程序,所述计算机程序同时被处理器03执行。
通信模块01,可通过网络与外部设备连接。通信模块01可以接收外部设备发出的数据,还可发送数据、指令及信息至所述外部设备,所述外部设备可以是数据管理终端、手机、平板电脑、笔记本电脑和台式电脑等电子设备。
存储器02,可用于存储软件程序以及各种数据。存储器02可主要包括存储程序区和存储数据区,其中,存储程序区可存储操作系统、至少一个功能所需的应用程序等;存储数据区可存储被控车辆的运行情况和行驶环境以及信号机的相位变化所创建的数据或信息等。此外,存储器02可以包括高速随机存取存储器,还可以包括非易失性存储器,例如至少一个磁盘存储器件、闪存器件、或其他易失性固态存储器件。
处理器03,是车辆的控制中心,利用各种接口和线路连接整个车辆的各个部分,通过运行或执行存储在存储器02内的软件程序和/或模块,以及调用存储在存储器02内的数据,执行车辆的各种功能和处理数据。处理器03可包括一个或多个处理单元;优选的,处理器03可集成应用处理器和调制解调处理器,其中,应用处理器主要处理操作系统、用户界面和应用程序等,调制解调处理器主要处理无线通信。可以理解的是,上述调制解调处理器也可以不集成到处理器03中。
本领域技术人员可以理解,图1中示出的车辆模块结构并不构成对车辆的限定,可以包括比图示更多或更少的部件,或者组合某些部件,或者不同的部件布置。
根据上述模块结构,提出本发明方法各个实施例。
目前电动汽车的辅助驾驶控制方法为:在辅助驾驶系统激活的条件下,电子稳定控制器(Electronic Stability Control,简称ESC)接收辅助驾驶系统的速度、加速度等请求,并经过计算转换成扭矩请求,将该扭矩请求发送至整车控制器(Vehicle ControlUnit,简称VCU),整车控制器响应电子稳定控制器的扭矩请求,将该扭矩请求输入至电机控制器,以使电机控制器控制电机根据该扭矩请求进行转动,从而实现辅助驾驶系统的功能控制。但是目前的该辅助驾驶控制方法,对于辅助驾驶系统的响应较慢,即车辆执行辅助驾驶系统下达的决策不够及时,从而导致车辆具有严重的安全隐患。
对此,为了提高现有辅助驾驶系统的决策响应速度,本发明提出了一种辅助驾驶的控制方法。
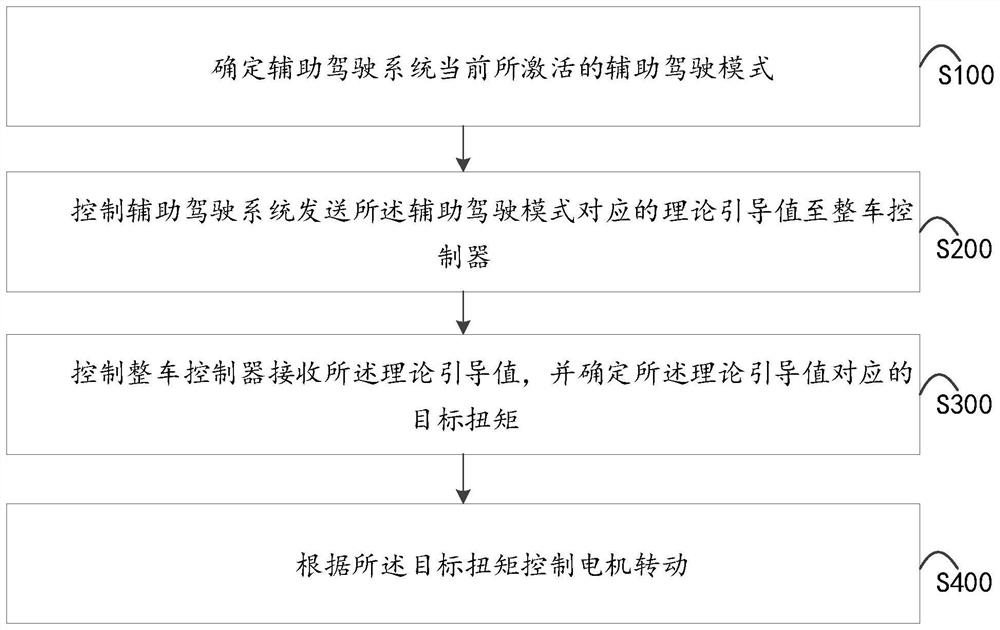
参照图2,图2为本发明辅助驾驶的控制方法第一实施例的流程示意图,所述控制方法包括:
步骤S100,确定辅助驾驶系统当前所激活的辅助驾驶模式;
可以理解的是,多种辅助驾驶模式均集成于车辆搭载的辅助驾驶系统中,用户可根据具体的行驶环境进行选择。例如,该辅助驾驶模式包括自动紧急制动模式、自适应巡航模式和自动泊车模式等。
步骤S200,控制辅助驾驶系统发送所述辅助驾驶模式对应的理论引导值至整车控制器;
需要说明的是,该理论引导值可包括理论速度值和/或理论加速度值等。可以理解的是,辅助驾驶系统对当前车辆的行驶环境进行分析和处理后作出行驶决策,以引导车辆按照行驶决策中的理论速度值和/或理论加速度值进行行驶。
步骤S300,控制整车控制器接收所述理论引导值,并确定所述理论引导值对应的目标扭矩;
步骤S400,根据所述目标扭矩控制电机转动。
其中,通过根据所述目标扭矩控制电机转动的步骤,从而引导车辆根据该理论引导值行驶。
本发明实施例通过辅助驾驶系统直接与整车控制器进行信息交互,辅助驾驶系统通过CAN(控制器局域网络,Controller Area Network)网络发送当前辅助驾驶模式对应的理论引导值至整车控制器,整车控制器通过扭矩控制算法将理论引导值转换为对应的目标扭矩,电机控制器根据该目标扭矩控制电机转动,实现了辅助驾驶系统的功能及性能要求。本发明实施例在不需要电子稳定控制系统参与扭矩控制的情况下,辅助驾驶系统直接将行驶决策信息发送至整车控制器,减少了响应时延,加快执行辅助驾驶系统下达的行驶决策的效率,提高了辅助驾驶系统的决策响应速度,同时也避免了中间需要经过较多节点而导致的数据传输损失或数据运算误差等问题,提高数据处理和计算的准确性,实现辅助驾驶系统在不同辅助驾驶模式下的扭矩控制,提升响应精度。
进一步地,参照图3,图3为本发明第二实施例的部分流程示意图,基于第一实施例,所述步骤S400之后包括:
步骤S510,按预设周期检测当前车辆的实际引导值,得到第一实际引导值、第二实际引导值和第三实际引导值;
其中,所述第一实际引导值为当前周期检测的实际引导值,所述第二实际引导值和所述第三实际引导值为当前周期的前两次周期检测的实际引导值,所述第二实际引导值的检测时间在所述第三实际引导值的检测时间之后。
可以理解的是,该实际引导值可表征该车辆实际行驶的实际速度值和/或车辆实际行驶的实际加速度值。
步骤S520,根据所述第三实际引导值对所述第二实际引导值进行低通滤波处理,得到第一低通滤波引导值;
具体地,Y(n)
其中,Y(n)
第一滤波系数α
步骤S530,根据所述第一低通滤波引导值对所述第一实际引导值进行低通滤波处理,得到第二低通滤波引导值;
具体地,Y(n)
其中,Y(n)
第二滤波系数α
步骤S540,计算所述理论引导值和所述第二低通滤波引导值的引导差值;
其中,该引导差值等于理论引导值减去第二低通滤波引导值的差。
步骤S550,确定所述引导差值对应的扭矩差值,并计算所述扭矩差值和所述目标扭矩的扭矩和值;
其中,该扭矩和值等于扭矩差值加上目标扭矩的和。
步骤S560,根据所述扭矩和值控制电机转动。
本发明通过按预设周期检测当前车辆的实际引导值,得到第一实际引导值、第二实际引导值和第三实际引导值;根据所述第三实际引导值对所述第二实际引导值进行低通滤波处理,得到第一低通滤波引导值;根据所述第一低通滤波引导值对所述第一实际引导值进行低通滤波处理,得到第二低通滤波引导值的步骤,从而减少车辆行驶不平稳、行驶抖动等因素导致的车辆某时刻的实际引导值出现偏差,进而提高检测当前车辆的实际引导值的准确性,再进一步通过计算所述理论引导值和所述第二低通滤波引导值的引导差值;确定所述引导差值对应的扭矩差值,并计算所述扭矩差值和所述目标扭矩的扭矩和值的步骤,从而将车辆的实际引导值与理论引导值进行比较,确定是否存在偏差,当出现偏差时,对实际引导值进行补偿。本实施例通过闭环自动调节的方式,实现扭矩控制的自适应调节,从而确保车辆的实际引导值与辅助驾驶系统下发的理论引导值一致,提高辅助驾驶扭矩控制的精确性,进而提升辅助驾驶系统所作出的行驶决策执行的准确性。
进一步地,所述根据所述扭矩和值控制电机转动的步骤包括:
步骤a,基于所述目标扭矩对所述扭矩和值进行低通滤波处理,得到低通滤波扭矩;
步骤b,根据所述低通滤波扭矩控制电机转动。
具体地,Y(n)
其中,Y(n)
第三滤波系数α
本实施例通过基于所述目标扭矩对所述扭矩和值进行低通滤波处理,得到低通滤波扭矩;根据所述低通滤波扭矩控制电机转动的步骤,从而进一步确保车辆的实际引导值与辅助驾驶系统下发的理论引导值一致,提高辅助驾驶扭矩控制的精确性,进而提升辅助驾驶系统下发的行驶决策执行的准确性。
进一步地,参照图4,图4为本发明第三实施例的部分流程示意图,基于第一实施例,所述步骤S200之前包括:
步骤S610,判断激活的所述辅助驾驶模式是否为自动紧急制动模式;
若激活的所述辅助驾驶模式为自动紧急制动模式,则执行步骤S620:实时获取当前车辆的行驶环境信息,并发送行驶环境信息至电子稳定控制器;
步骤S630,控制电子稳定控制器根据所述行驶环境信息,判断预设距离内是否存在障碍物;
若确定预设距离内存在障碍物,则执行步骤S640:发送制动信号至车辆制动器;
步骤S650,控制所述车辆制动器接收所述制动信号,根据所述制动信号进行制动;
若激活的所述辅助驾驶模式不为自动紧急制动模式,则执行所述步骤S200:控制辅助驾驶系统发送所述辅助驾驶模式对应的理论引导值至整车控制器。
本实施例通过若激活的所述辅助驾驶模式为自动紧急制动模式,实时获取当前车辆的行驶环境信息,并发送行驶环境信息至电子稳定控制器;控制电子稳定控制器根据所述行驶环境信息,判断预设距离内是否存在障碍物;若确定预设距离内存在障碍物,则控制所述车辆制动器接收所述制动信号,根据所述制动信号进行制动的步骤,从而实现在自动紧急制动模式下,辅助驾驶系统直接将行驶决策信息发送至电子稳定控制器,并通过电子稳定控制器直接作用到制动器上,减少了紧急情况下需要进行制动的响应时延,加快执行辅助驾驶系统下达的行驶决策的效率,提高了辅助驾驶系统的决策响应速度,进而提高了车辆行驶的安全性。
进一步地,所述若激活的所述辅助驾驶模式不为自动紧急制动模式,则执行:所述控制辅助驾驶系统发送所述辅助驾驶模式对应的理论引导值至整车控制器的步骤包括:
步骤c,若激活的所述辅助驾驶模式不为自动紧急制动模式,则判断激活的所述辅助驾驶模式是否为自适应巡航模式;
步骤d,若激活的所述辅助驾驶模式为自适应巡航模式,则确定所述辅助驾驶模式对应的理论引导值为理论加速度值,并执行:所述控制辅助驾驶系统发送所述辅助驾驶模式对应的理论引导值至整车控制器的步骤。
本发明实施例通过若激活的所述辅助驾驶模式不为自动紧急制动模式,则判断激活的所述辅助驾驶模式是否为自适应巡航模式;若激活的所述辅助驾驶模式为自适应巡航模式,则确定所述辅助驾驶模式对应的理论引导值为理论加速度值,并执行:所述控制辅助驾驶系统发送所述辅助驾驶模式对应的理论引导值至整车控制器的步骤,从而实现在自适应巡航模式下,采用加速度响应机制,比速度响应机制的响应速度更快,减少了紧急情况下需要进行制动的响应时延,加快执行辅助驾驶系统所作出的行驶决策的效率,提高了辅助驾驶系统的决策响应速度,进而提高了车辆行驶的安全性。
进一步地,所述若激活的所述辅助驾驶模式不为自动紧急制动模式,则执行:所述控制辅助驾驶系统发送所述辅助驾驶模式对应的理论引导值至整车控制器的步骤包括:
步骤e,若激活的所述辅助驾驶模式不为自动紧急制动模式,则判断激活的所述辅助驾驶模式是否为自动泊车模式;
步骤f,若激活的所述辅助驾驶模式为自动泊车模式,则确定所述辅助驾驶模式对应的理论引导值为理论速度值,并执行:所述控制辅助驾驶系统发送所述辅助驾驶模式对应的理论引导值至整车控制器的步骤。
本实施例通过若激活的所述辅助驾驶模式不为自动紧急制动模式,则判断激活的所述辅助驾驶模式是否为自动泊车模式;若激活的所述辅助驾驶模式为自动泊车模式,则确定所述辅助驾驶模式对应的理论引导值为理论速度值,并执行:所述控制辅助驾驶系统发送所述辅助驾驶模式对应的理论引导值至整车控制器的步骤,从而实现在自动泊车模式下,采用速度响应机制,比加速度响应机制的准确性更高,提高辅助驾驶扭矩控制的准确性,进而提升自动泊车的精确性。
进一步地,参照图5,图5为本发明第四实施例的部分流程示意图,基于第一实施例,所述步骤S100之前包括:
步骤S700,判断辅助驾驶系统的功能是否预备正常;
若所述辅助驾驶系统的功能预备正常,则执行所述步骤S100:确定辅助驾驶系统当前所激活的辅助驾驶模式。
本实施例通过判断辅助驾驶系统的功能是否预备正常;若所述辅助驾驶系统的功能预备正常,则执行所述确定辅助驾驶系统当前所激活的辅助驾驶模式的步骤,从而提高了车辆行驶的安全性。
具体地,所述判断辅助驾驶系统的功能是否预备正常的步骤包括:
步骤h,判断当前车辆是否处于上电状态、防抱死制动功能是否运行正常、电子稳定控制功能是否运行正常,以及车身控制功能是否运行正常;
步骤i,所述若所述辅助驾驶系统的功能预备正常,则执行:所述确定辅助驾驶系统当前所激活的辅助驾驶模式的步骤包括:
步骤j,若确定当前车辆处于上电状态、防抱死制动功能运行正常、电子稳定控制功能运行正常,以及车身控制功能运行正常,则执行:所述确定辅助驾驶系统当前所激活的辅助驾驶模式的步骤。
本实施例通过判断当前车辆是否处于上电状态、防抱死制动功能是否运行正常、电子稳定控制功能是否运行正常,以及车身控制功能是否运行正常的步骤,从而提高了验证辅助驾驶系统的功能是否预备正常的验证准确性,进而提高了车辆行驶的安全性。
为了便于充分理解本发明,本发明下面列举辅助驾驶的控制方法具体实施例一,请参照图6。需要说明的是,在该具体实施例一中阐述了很多具体细节以便于充分理解本发明。但是本发明能够以很多不同于在此描述的其它方式来实施,本领域技术人员可以在不违背本发明内涵的情况下做类似推广,因此本发明不受该具体实施例一的限制:
具体实施例一:
(1)VCU(Vehicle Control Unit,整车控制器)首先进行自检,自检条件包括但不限于:整车处于上电预备状态、无ABS(Anti-locked BrakingSystem,防抱死刹车系统)故障,无ESC(Electronic Stability Control,电子稳定控制系统)故障,BCM(body controlmodule,车身控制系统)发的远程上电信号数值为1,满足以上条件即允许VCU响应ADAS(AdvancedDriving Assistance System,辅助驾驶系统)的请求,表明ADAS模式可用。
(2)在满足ADAS模式可用情况下,同时满足以下条件即可进入ACC(AdaptiveCruise Control,自适应巡航控制)模式:(a)驾驶员没有接管意图(油门踏板未被踩下、且制动踏板未踩下、且手刹未拉起);(b)无跛行故障;(c)无限速故障;(d)无零扭矩故障;(e)整车处于前进档;(f)ADAS发送了控制请求;(g)ADAS控制模式为ACC;(h)无EPB(ElectricalPark Brake,电子驻车制动系统)故障;(i)动态驻车未激活;(j)电池电量大于阈值。
(3)在满足ADAS模式可用情况下,同时满足以下条件即可进入APA(AutoParkingAssist,自动泊车辅助系统)模式:(A)ADAS发送了控制请求;(B)ADAS控制模式为APA;(C)无跛行故障;(D)无零扭矩故障;(E)动态驻车未激活;(F)无EPS(Electrical PowerSteering,电子助力转向系统)故障;(G)无EPB故障;(H)整车处于上电预备状态;(I)驾驶员没有接管意图(油门踏板没有踩下、且制动踏板未踩下、且手刹未拉起)。
(4)在满足ADAS模式可用情况下,同时满足ADAS请求模式为AEB(AutonomousEmergency Braking,自动紧急制动系统),即AEB激活。
(5)在ACC模式激活时,VCU根据当前车辆的实际加速度(经过低通滤波处理),计算出该实际加速度和ADAS发送的目标加速度的差值,经过PID(Proportional IntegralDerivative,闭环自动控制)模块调节得到加速度差值对应的轮边扭矩差值,再加上当前整车的实际扭矩,得到目标加速度下的目标轮边扭矩,将此扭矩经过滤波及扭矩限值处理后,发送给电机控制器,实现车辆的加速或减速,最终实现ADAS的加速度(有正有负)的请求。
(6)在APA模式激活时,VCU响应ADAS的档位请求,用电机转速计算出当前的车速(经过低通滤波处理),再计算出与ADAS发送的目标速度的差值,经过PID模块调节得到速度差值对应的轮边扭矩,再加上当前整车输出的轮边扭矩,得到目标轮边扭矩,结合将此轮边扭矩发送给电机控制器,实现整车的加减速及前进和后退,最终实现APA功能。
(7)在AEB(Autonomous Emergency Braking,自动紧急制动系统)激活模式时,VCU断开扭矩控制,由ESC接管进行制动。如果车辆还保持在某个车速下一定时间,则退出AEB模式,在退出过程中持续监控油门踏板,当油门踏板低于某个阈值时才正式退出AEB功能。
(8)ACC和APA采用不用的响应机制,ACC用加速度响应,APA用速度响应,在扭矩控制方面采用不同的PID调节,能保证在不同功能下响应性能互不影响及扭矩的自适应调节。
本发明实施例通过ADAS利用CAN网络发送速度和加速度请求至VCU,VCU通过扭矩控制算法,将速度和加速度请求转换为扭矩输出给电机控制器,实现ADAS的功能及性能要求,本实施例通过ADAS直接与VCU进行信息交互,不需要ESC参与扭矩控制,从而减少响应时延和提升响应精度。
本发明还提出一种计算机可读存储介质,其上存储有计算机程序。所述计算机可读存储介质可以是图1的终端中的存储器02,也可以是如ROM(Read-Only Memory,只读存储器)/RAM(Random Access Memory,随机存取存储器)、磁碟、光盘中的至少一种,所述计算机可读存储介质包括若干信息用以使得终端执行本发明各个实施例所述辅助驾驶的控制方法。
本发明计算机可读存储介质的具体实施例与上述辅助驾驶的控制方法各实施例基本相同,在此不作赘述。
需要说明的是,在本文中,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者系统不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者系统所固有的要素。在没有更多限制的情况下,由语句“包括一个……”限定的要素,并不排除在包括该要素的过程、方法、物品或者系统中还存在另外的相同要素。
另外,若本发明实施例中有涉及“第一”、“第二”等的描述,则该“第一”、“第二”等的描述仅用于描述目的,而不能理解为指示或暗示其相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。另外,各个实施例之间的技术方案可以相互结合,但是必须是以本领域普通技术人员能够实现为基础,当技术方案的结合出现相互矛盾或无法实现时应当认为这种技术方案的结合不存在,也不在本发明要求的保护范围之内。
上述本发明实施例序号仅仅为了描述,不代表实施例的优劣。
通过以上的实施方式的描述,本领域的技术人员可以清楚地了解到上述实施例方法可借助软件加必需的通用硬件平台的方式来实现,当然也可以通过硬件,但很多情况下前者是更佳的实施方式。
以上仅为本发明的优选实施例,并非因此限制本发明的专利范围,凡是利用本发明说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其他相关的技术领域,均同理包括在本发明的专利保护范围内。
- 辅助驾驶的控制方法、车辆及计算机可读存储介质
- 混合动力车辆、混合动力车辆的控制方法、及储存了用于使计算机执行该控制方法的程序的计算机可读取存储介质