一种移动式激光加工基站系统及使用方法
文献发布时间:2023-06-19 13:51:08
技术领域
本发明涉及激光加工技术领域,尤其是涉及一种移动式激光加工基站系统及使用方法。
背景技术
激光加工是 20 世纪 60 年代初期兴起的一项新技术,此后逐步应用于机械、汽车、航空、电子等行业,尤以机械行业的应用发展速度最快。目前,激光材料加工技术包括焊接、熔覆、淬火、切割等方面,以上激光材料加工技术往往需要激光器匹配相应功率的型号才能够快速、有效率的完成加工。然而,在面对一些难拆卸、无法拆卸的工件进行进行激光加工时,由于加工区的面积相对较小,这样导致大型激光设备无法安装进行使用,若选择相对较小的设备,又会因功率不高导致加工效率不理想。
发明内容
本发明要解决的技术问题是:为了解决在面对一些难拆卸、无法拆卸的工件进行进行激光加工时,如何在加工区的面积相对较小的情况下提高激光加工的效率的问题,本发明提供了一种移动式激光加工基站系统及使用方法,加工时,将转运集装箱体放在安全位置,只需将机器人、机器人控制柜、送粉机移至作业场地就可进行加工,占地面积小;相较于传统激光设备,本发明操作方便、移动方便、加工精度高、加工效率高。
本发明提供一种移动式激光加工基站系统及使用方法, 包括:转运集装箱体、移动加工模组、激光器、总控制柜、氮气瓶、稳压源、水冷机、斜坡块和空压机,所述转运集装箱体的侧壁上设有供电航插,所述转运集装箱体上设有门体,所述转运集装箱体内设有第一放置区域、第二放置区域和第三放置区域,所述移动加工模组包括机器人模组、送粉机、机器人控制柜和PLC控制柜;所述氮气瓶用于对机器人模组提供淬火需要的氮气,所述稳压源用于对激光器提供稳定电压,所述空压机用于防止机器人模组在工作时发生粉末飞溅,所述总控制柜安装在转运集装箱体的侧壁上,所述移动加工模组、激光器、氮气瓶、稳压源以及斜坡块均位于第一放置区域内,所述水冷机位于第二放置区域内,所述空压机位于第三放置区域内。
具体的,所述机器人模组包括底座和机器人,所述底座的底部设有底板,所述底板的底部设有四个呈矩形分布的第一移动轮,所述机器人上安装有光纤架和激光加工头,所述机器人安装在底座的顶部。
具体的,所述底板上还交接有四个呈矩形分布的活动块,所述活动块上安装有定位脚杯。
具体的,所述激光器和机器人控制柜的底部均设有四个呈矩形分布的第二移动轮。
具体的,所述斜坡块由橡胶材质制成。
具体的,移动式激光加工基站系统还包括工具柜、空调内机和空调外机,所述工具柜和空调内机均位于第一放置区域内,所述空调外机位于第三放置区域内。
具体的,所述转运集装箱体的顶部设有若干个提吊件。
具体的,所述转运集装箱体的侧壁上设有爬梯。
具体的,所述氮气瓶上安装有电磁阀,所述电磁阀与送粉机连接。
移动式激光加工基站系统的使用方法:
S1:将转运集装箱体移动至加工作业场地的安全位置,将打开箱门,拿出橡胶斜坡放在转运集装箱体的出口;
S2:将机器人模组、送粉机、机器人控制柜以及PLC控制柜全部移动至加工处;
S3:将四个活动块移动展开,调节定位脚杯使得机器人模组固定完成,将光纤架架好,水冷机加水;
S4:对各个部件线路、水路连接情况进行检查;
S5:检查结束后,在激光加工头上接上光纤和冷却水路;
S6:对供电航插上接入电源,打开总控制柜,通过总控制柜依次打开水冷机、机器人控制柜、PLC控制柜、送粉机以及激光器。
S7:机器人模组开始运作。
本发明的有益效果在于:
本发明的一种移动式激光加工基站系统,加工时,将转运集装箱体放在安全位置,只需将机器人、机器人控制柜、送粉机移至作业场地就可进行加工,占地面积小;相较于传统激光设备,本发明操作方便、移动方便、加工精度高、加工效率高。
附图说明
为了更清楚地说明本发明具体实施方式或现有技术中的技术方案,下面将对具体实施方式或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图是本发明的一些实施方式,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
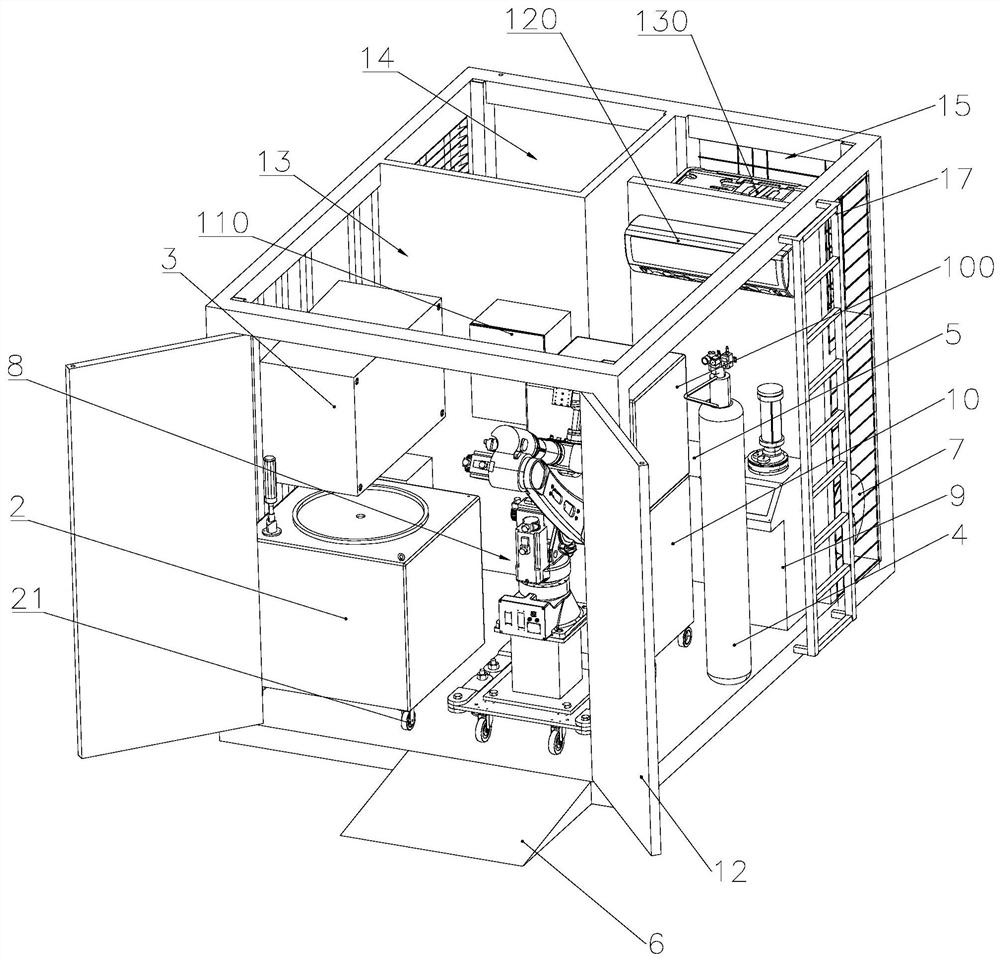
图1为移动式激光加工基站系统的结构示意图一,
图2为移动式激光加工基站系统的结构示意图二,
图3为移动加工模组的结构示意图;
附图标记:转运集装箱体1,供电航插11,门体12,第一放置区域13,第二放置区域14,第三放置区域15,提吊件16,爬梯17,激光器2,第二移动轮21,总控制柜3,氮气瓶4,稳压源5,斜坡块6,空压机7,机器人模组8,底座81,机器人82,底板83,第一移动轮84,光纤架85,激光加工头86,活动块87,定位脚杯88,送粉机9,机器人控制柜10,PLC控制柜100,工具柜110,空调内机120,空调外机130。
具体实施方式
下面将结合附图对本发明的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。
如图1-3所示,一种移动式激光加工基站系统, 包括:转运集装箱体1、移动加工模组、激光器2、总控制柜3、氮气瓶4、稳压源5、水冷机、斜坡块6和空压机7,转运集装箱体1的侧壁上设有供电航插11,转运集装箱体1上设有门体12,转运集装箱体1内设有第一放置区域13、第二放置区域14和第三放置区域15,移动加工模组包括机器人模组8、送粉机9、机器人控制柜10和PLC控制柜100;氮气瓶4用于对机器人模组8提供淬火需要的氮气,稳压源5用于对激光器2提供稳定电压,空压机7用于防止机器人模组8在工作时发生粉末飞溅,总控制柜3安装在转运集装箱体1的侧壁上,移动加工模组、激光器2、氮气瓶4、稳压源5以及斜坡块6均位于第一放置区域13内,水冷机位于第二放置区域14内,空压机7位于第三放置区域15内。
在一种具体实施方式中,机器人模组8包括底座81和机器人82,底座81的底部设有底板83,底板83的底部设有四个呈矩形分布的第一移动轮84,机器人82上安装有光纤架85和激光加工头86,机器人82安装在底座81的顶部;利用第一移动轮84来移动整个机器人模组8,机器人82配合激光加工头86进行加工。
在一种具体实施方式中,底板83上还交接有四个呈矩形分布的活动块87,活动块87上安装有定位脚杯88;通过定位脚杯88来确保底座81以及机器人82的固定稳定性。
在一种具体实施方式中,激光器2和机器人控制柜10的底部均设有四个呈矩形分布的第二移动轮21;通过第二移动轮21提高激光器2和机器人控制柜10的移动便捷性。
在一种具体实施方式中,斜坡块6由橡胶材质制成,
在一种具体实施方式中,移动式激光加工基站系统还包括工具柜110、空调内机120和空调外机130,工具柜110和空调内机120均位于第一放置区域13内,空调外机130位于第三放置区域15内;利用空调内机120和空调外机130对第一放置区域13内进行降温,工具柜110能够放置一些安装以及维护的工具。
在一种具体实施方式中,转运集装箱体1的顶部设有若干个提吊件16;能够通过提吊装置对转运集装箱体1进行搬运。
在一种具体实施方式中,转运集装箱体1的侧壁上设有爬梯17;通过爬梯17能够快速达到转运集装箱体1的顶部,便于线路和水路进行安装。
在一种具体实施方式中,氮气瓶4上安装有电磁阀,电磁阀与送粉机9连接;通过电磁阀能够快速控制氮气瓶4的开启和关闭。
移动式激光加工基站系统的使用方法:
S1:将转运集装箱体1移动至加工作业场地的安全位置,将打开箱门,拿出斜坡块6放在转运集装箱体1的出口;
S2:将机器人模组8、送粉机9、机器人控制柜10以及PLC控制柜100全部移动至加工处;
S3:将四个活动块87移动展开,调节定位脚杯88使得机器人模组8固定完成,将光纤架85架好,水冷机加水;
S4:对各个部件线路、水路连接情况进行检查;
S5:检查结束后,在激光加工头86上接上光纤和冷却水路;
S6:对供电航插11上接入电源,打开总控制柜3,通过总控制柜3依次打开水冷机、机器人控制柜10、PLC控制柜100、送粉机9以及激光器2。
S7:机器人模组8开始运作。
最后应说明的是:以上各实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述各实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的范围。
- 一种移动式激光加工基站系统及使用方法
- 一种以半导体激光器为光源的移动式激光加工系统