用于重载下肢助力外骨骼的无源重力补偿髋关节及机器人
文献发布时间:2023-06-19 12:14:58
技术领域
本发明属于重载下肢助力外骨骼机器人技术领域,特别涉及用于重载下肢助力外骨骼的无源重力补偿髋关节及机器人。
背景技术
人体行走步态研究表明:在平地行走过程中,髋关节角度呈正弦曲线周期变化,髋关节力矩有正值和负值;髋关节功率有正功及负功,且在行走周期内平均功率为正值,这说明人体髋关节在行走中主要起主动作用。然而针对重载下肢助力外骨骼,负重一般在50kg以上,主要助力机理是通过刚性结构将负载重量分散传递至地面,并在膝关节处提供主动行走助力。其突出问题是外骨骼本体结构自重过大、髋部成为主要承力部位,穿戴者髋关节需提供较大关节力矩和瞬时功率,克服外骨骼自身重力做功才可带动外骨骼随动。因此对于重载下肢助力外骨骼,在髋部引入重力补偿机构是十分必要的。
目前,在现有下肢助力外骨骼中,髋关节主要以主动有源的直驱机构为主,采用电机、气动、液压等驱动方式,此类方案主要利用传感器感知人体运动意图,并通过控制程序驱动执行机构输出辅助转矩,虽能一定程度实现助力,但存在自重大、可靠性低、成本高、续航短的缺点。为解决上述问题,无源被动髋关节设计方案开始出现。例如在背部布置弹簧,通过拉动钢丝绳驱动髋关节处的滑轮输出助力转矩实现重力平衡,此方案原理简单,但存在体积大、效率低,难以柔顺助力的缺点。综上所述,一种应用于重载下肢助力外骨骼、高度集成、可实现柔顺重力补偿的无源髋关节仍是空白。
发明内容
本发明提出用于重载下肢助力外骨骼的无源重力补偿髋关节,包括:髋关节单元、腰部转接件和大腿转接件;
所述腰部转接件第一端设置有若干个固定孔位,用于与腰部组件固定连接;
所述腰部转接件第二端与髋关节单元外侧固定连接;
所述髋关节单元输出端能够转动,所述髋关节单元输出端与所述大腿转接件第一端抱紧连接;
所述大腿转接件第二端用于与大腿组件销轴连接。
进一步地,所述髋关节单元包括液压弹簧、直线导轨、凸轮从动件、凸轮随动轴承、下壳体、输出轴、凸轮和上壳体;
所述上壳体第一端与下壳体第一端之间设有夹紧机构,所述夹紧机构与所述液压弹簧第二端固定连接;
所述液压弹簧第二端设置有伸缩杆,所述凸轮从动件第一端紧靠伸缩杆端面;
所述凸轮随动轴承通过销轴转动固定所述凸轮从动件第二端;
所述凸轮随动轴承紧靠所述凸轮侧表面;
所述下壳体第一端设置有直线导轨;
所述凸轮从动件底部设置在所述直线导轨内,所述凸轮从动件能够沿所述直线导轨内滑动;
所述凸轮套设在所述输出轴上,所述凸轮与所述输出轴第一端固定连接,所述凸轮与所述输出轴能够沿输出轴轴线转动;
所述输出轴第二端伸出壳体,所述输出轴第二端与大腿转接件连接。
进一步地,所述输出轴两端设置有轴承,所述输出轴通过两端轴承固定在下壳体上。
进一步地,所述直线导轨与所述液压弹簧轴线方向相同。
进一步地,所述直线导轨内设置有滑块,所述滑块能够所述直线导轨滑动;
所述凸轮从动件底部与滑块固定连接。
进一步地,所述凸轮随动轴承与凸轮能够发生相对运动。
进一步地,当凸轮从动件处于直线导轨第一端时,所述液压弹簧伸缩杆被压缩至最短;
当凸轮从动件处于直线导轨第二端时,所述液压弹簧伸缩杆伸长至最长;
当所述液压弹簧伸缩杆被压缩至最短时,所述凸轮与凸轮随动轴承紧靠处距凸轮圆心距离最长;
当所述液压弹簧伸缩杆伸长至最长时,所述凸轮与凸轮随动轴承紧靠处距凸轮圆心距离最短。
进一步地,所述上壳体内部设置有限位块,限位块能够限制凸轮转动。
进一步地,所述腰部转接件第二端与上壳体外侧固定连接。
本发明还设计一种机器人,所述机器人包括如上所述的用于重载下肢助力外骨骼的无源重力补偿髋关节。
本发明所设计的用于重载下肢助力外骨骼的无源重力补偿髋关节为无源重力补偿关节,采用液压弹簧能量转换原理,基于液压弹簧与凸轮的集成化设计,不需要机电、液压、气动驱动,未含有控制器、传感器、驱动器等电子控制系统组件,可以高可靠、无限续航长时工作;通过基于生物力学分析的凸轮轮廓计算和设计,可以在运动过程中的任意角度输出合适的辅助转矩,且不产生突变或冲击,具备超大转矩的柔顺输出能力,具有小型化、轻量化的优点。
附图说明
图1示出了本发明实施例的用于重载下肢助力外骨骼的无源重力补偿髋关节立体结构图;
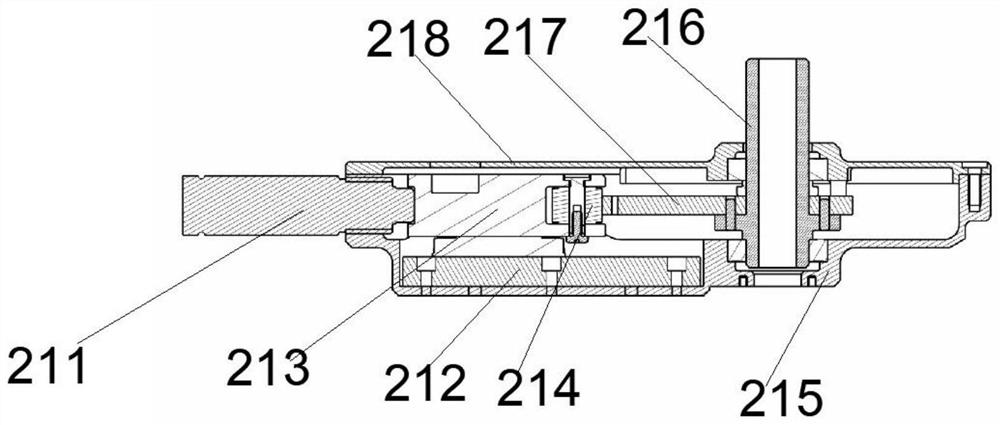
图2示出了本发明实施例的用于重载下肢助力外骨骼的无源重力补偿髋关节剖视图;
图3示出了本发明实施例的用于重载下肢助力外骨骼的无源重力补偿髋关节内部结构图;
图4示出了本发明实施例的一种用于重载下肢助力外骨骼的无源重力补偿髋关节膝关节组件的原理示意图;
图5示出了本发明实施例的使用无源重力补偿髋关节的下肢助力外骨骼立体图。
图中:001、腰部组件;002、无源重力补偿髋关节;003、膝关节组件;004、踝关节组件;210、髋关节单元;211、液压弹簧;212、直线导轨;213、凸轮从动件;214、凸轮随动轴承;215、下壳体;216、输出轴;217、凸轮;218、上壳体;220、腰部转接件;230、大腿转接件。
具体实施方式
下面将参照附图更详细地描述本公开的示例性实施例。虽然附图中显示了本公开的示例性实施例,然而应当理解,可以以各种形式实现本公开而不应被这里阐述的实施例所限制。相反,提供这些实施例是为了能够更透彻地理解本公开,并且能够将本公开的范围完整的传达给本领域的技术人员。
本发明提供了用于重载下肢助力外骨骼的无源重力补偿髋关节,如图1所示,所述无源重力补偿髋关节包括:髋关节单元210、腰部转接件220和大腿转接件230。本发明所设计的无源重力补偿髋关节,不仅可以应用于外骨骼中腿部结构,也可以应用于机器人下肢结构、足式机器人腿部结构。无源重力补偿髋关节对称布置于腰部组件两侧,所述腰部转接件220第一端设置有若干个固定孔位,与腰部组件001通过螺钉固定连接。所述腰部转接件220第二端与髋关节单元210外壳固定连接。所述髋关节单元210设置有输出端,输出端能够转动,所述髋关节单元210输出端与所述大腿转接件230第一端抱紧连接;所述大腿转接件230第二端用于与大腿组件003销轴连接。在传递辅助转矩的同时,满足大腿内外翻的自由度要求。
如图2、图3所示,所述髋关节单元210包括液压弹簧211、直线导轨212、凸轮从动件213、凸轮随动轴承214、下壳体215、输出轴216、凸轮217和上壳体218。髋关节单元210壳体包括上壳体218和下壳体215。所述上壳体218第一端与下壳体215第一端之间设有夹紧机构,所述夹紧机构与所述液压弹簧211第二端固定连接。优选的,上壳体218第一端与下壳体215第一端之间设置有螺纹,所述液压弹簧211通过螺纹固定在壳体的第一端。
所述液压弹簧211第二端设置有伸缩杆,液压弹簧211具有弹力,当伸缩杆受到一定压力时,伸缩杆收缩;当伸缩杆受到压力减少时,弹力能够将伸缩杆伸长。伸缩杆远离液压弹簧211方向设有伸缩杆端面,所述凸轮从动件213第一端紧靠伸缩杆端面,与伸缩杆面接触。凸轮随动轴承214通过销轴转动固定在凸轮从动件213第二端。所述下壳体215第一端设置有直线导轨212;所述凸轮从动件213底部设置在所述直线导轨212内,所述凸轮从动件213能够沿所述直线导轨212内滑动;所述直线导轨212与所述液压弹簧211轴线方向相同。优选的,所述直线导轨212内设置有滑块,所述滑块能够所述直线导轨212滑动;所述凸轮从动件213底部与滑块固定连接。在弹力的作用下,凸轮从动件213带动凸轮随动轴承214沿液压弹簧211轴线方向作往复直线运动。所述凸轮随动轴承214紧靠所述凸轮217侧表面,与凸轮217侧表面始终保持接触;在弹力的带动下,凸轮随动轴承214与凸轮217发生相对运动。
所述凸轮217套设在所述输出轴216上,所述凸轮217与所述输出轴216第一端固定连接,优选的,两者之间通过螺钉固定连接,不发生相对转动。所述输出轴216两端设置有轴承,所述输出轴216通过两端轴承固定在下壳体215上。所述输出轴216第二端伸出壳体,所述输出轴216第二端与大腿转接件230连接。当凸轮217转动时,所述凸轮217与所述输出轴216能够同时沿输出轴216轴线转动。所述腰部转接件220第二端与上壳体218外侧固定连接。当凸轮217与凸轮随动轴承214发生相对转动时,由于上壳体218与腰部组件001固定不动,输出轴216带动大腿转接件230转动,最终带动大腿组件003绕输出轴发生转动,弹性势能被释放并转化为辅助转矩。优选的,液压弹簧211最大压缩时所包含的弹性势能大于等于使用无源重力补偿髋关节的外骨骼本体结构的重力势能。
本发明所设计的无源重力补偿髋关节002,其中凸轮217轮廓曲线与液压弹簧211匹配设计,实现液压弹簧211在不同关节旋转角度的不同伸缩,进而产生非线性的满足实际需求的转矩。
当凸轮从动件213处于直线导轨212第一端时,所述液压弹簧211伸缩杆被压缩至最短;当凸轮从动件213处于直线导轨212第二端时,所述液压弹簧211伸缩杆伸长至最长。凸轮217外轮廓为不规则弧形,外轮廓弧边离圆心距离逐渐增加。当所述液压弹簧211伸缩杆被压缩至最短时,所述凸轮217与凸轮随动轴承214紧靠处距凸轮217圆心距离最长,此时凸轮217外轮廓离圆心最远的弧边紧靠随动轴承214;其中,凸轮217外轮廓离圆心最远的弧边为回程起点,凸轮217外轮廓离圆心最近的弧边为回程终点。所述液压弹簧211伸缩杆在弹力作用下逐渐伸长,凸轮从动件213从直线导轨212第一端向直线导轨212第二端滑动,同时,凸轮随动轴承214带动凸轮217转动。此时,凸轮217外轮廓与凸轮随动轴承214接触的弧边离圆心距离随凸轮217转动逐渐减少。当所述液压弹簧211伸缩杆伸长至最长时,凸轮从动件213处于直线导轨212第二端,所述凸轮217与凸轮随动轴承214紧靠处距凸轮217圆心距离最短。当液压弹簧211由最长压缩到最短时,凸轮217反向运动,凸轮217与凸轮随动轴承214接触的弧边离圆心距离随凸轮217转动逐渐增加。
如图3所示,所述上壳体218内部设置有限位块,限位块能够限制凸轮217转动,使凸轮217只能在一定角度内转动。
本发明所设计的无源重力补偿髋关节,不需要有源动力,能够实现柔顺重力补偿。如图4所示,以人体双腿直立为起始零度角,此时,凸轮随动轴承214与凸轮217回程起点接触,液压弹簧211伸缩杆被压缩至最短,弹性势能最大;当人体穿戴外骨骼工作时,双腿需要带动外骨骼运动,则髋关节需要提供辅助转矩T以补偿外骨骼本体结构自重G。具体而言,大腿组件003绕髋关节屈伸自由度旋转时,带动下壳体215转动,从而凸轮从动件213向凸轮217回程终点运动,液压弹簧211的伸缩杆伸出,将储存的弹性势能不断释放,此时凸轮217与液压弹簧211的配合将接触力转换为髋关节处的输出转矩。
本发明中,液压弹簧211的弹性势能需要大于等于髋关节所带动的外骨骼本体结构的重力势能。不考虑其中的摩擦力等造成的能量损耗,基于能量守恒原理,凸轮217可以使无论大腿如何运动,外骨骼本体结构的重力势能都将与液压弹簧211的弹性势能保持势能守恒,以此实现在髋关节处对外骨骼本体结构的柔顺重力补偿,外骨骼下肢理论上可以悬停在任意髋关节屈伸角度上,使穿戴者不用克服外骨骼自重做功。
本发明还提供了一种机器人,该机器人使用上述实施例中的无源重力补偿髋关节。机器人可以为具有腿部结构的外骨骼,也可以是具有下肢结构的机器人或带有腿部结构的足式机器人。
如图5所示,图5为包含无源重力补偿髋关节的重载下肢助力外骨骼,包括:腰部组件001、无源重力补偿髋关节002、大腿组件003、小腿组件004和足踝组件005。所述腰部组件001两侧各固定安装有所述无源重力补偿髋关节002;两个所述无源重力补偿髋关节002下方各固定安装有所述膝关节组件003;两个所述膝关节组件003下方各固定安装有所述踝关节组件004。
本发明所设计的用于重载下肢助力外骨骼的无源重力补偿髋关节为无源重力补偿关节,采用液压弹簧能量转换原理,基于液压弹簧与凸轮的集成化设计,不需要机电、液压、气动驱动,未含有控制器、传感器、驱动器等电子控制系统组件,可以高可靠、无限续航长时工作;通过基于生物力学分析的凸轮轮廓计算和设计,可以在运动过程中的任意角度输出合适的辅助转矩,且不产生突变或冲击,具备超大转矩的柔顺输出能力,具有小型化、轻量化的优点。
以上仅为本申请的实施例而已,并不用于限制本申请。对于本领域技术人员来说,本申请可以有各种更改和变化。凡在本申请的精神和原理之内所作的任何修改、等同替换、改进等,均应包含在本申请的权利要求范围之内。
- 用于重载下肢助力外骨骼的无源重力补偿髋关节及机器人
- 一种用于下肢助力外骨骼机器人上的被动平衡髋关节