一种利用障碍物信息设定无人机飞行路径的系统和方法
文献发布时间:2023-06-19 09:43:16
技术领域
本发明属于无人机技术领域,具体涉及一种利用障碍物信息设定无人机飞行路径的系统和方法。
背景技术
近年来,随着无人机技术的日益成熟,不论是军用还是民用领域,无人机以其快捷便利、成本低、灵活性强等特点快速进入大众视野,许多国家逐步开始尝试放开航空管制,这促使无人机技术进入了一个高速发展期。凭借其独特的优势,无人机技术在抢险救灾、货物搬运、侦查勘探等领域得到了广泛的应用。随着工业化进程的发展和无人机技术的进步,目前无人机越来越普及,但其管理却相对混乱,无人机的放飞有无固定顺序、无固定地点、无固定时间的“三无”特点,其飞行严重威胁了空中的安全。因此目前有部分无人机管理系统能够对无人机的飞行进行管理,使无人机的飞行能够在管控之下,保障大众的安全。但即使这样,仍然会有无人机在自动驾驶时出现撞机等事故,撞机原因多是由于在规划飞行路径时没有及时更新障碍物信息,而导致无人机不能及时作出反应而撞机,撞机后不仅使得财产受到了损失,而且也存在一定的安全隐患。
发明内容
本发明的第一个目的是提供一种利用障碍物信息设定无人机飞行路径的系统,以解决无人机在规划飞行路径时没有及时更新障碍物信息而导致无人机撞机的问题。
本发明的第二个目的是提供一种利用障碍物信息设定无人机飞行路径的方法。
为实现上述第一个目的,本发明的技术方案是:
一种利用障碍物信息设定无人机飞行路径的系统,包括控制中心、无人机和第三方数据源;
所述第三方数据源与控制中心连接,第三方数据源将设定区域内的障碍物信息实时发送至控制中心;
所述无人机的数量为多个,无人机通过无线网络与控制中心连接;无人机包括通讯单元、障碍物监测单元、飞行管控单元;
所述通讯单元通过网络与控制中心进行数据的发送和接收;所述障碍物监测单元通过障碍物监测传感器实时监测障碍物数据,并通过通讯单元将障碍物数据发送至控制中心;所述飞行管控单元接收到控制中心拟定的飞行路径后指导无人机飞行;
所述控制中心包括通讯模块、地图绘制模块、飞行设定模块;
所述通讯模块用于与第三方数据源、无人机进行数据的传输;所述地图绘制模块将所述障碍物信息和所述障碍物数据转换为空间坐标信息,并更新至对应区域内的地图;所述飞行设定模块按照地图绘制模块中的地图和目的地拟定无人机的飞行路径。
优选的,所述障碍物监测传感器为超声波传感器、红外测距传感器,超声波传感器、红外测距传感器均设置在无人机的周向。
优选的,实时更新的所述障碍物信息和所述障碍物数据对应的空间坐标位于已拟定的无人机飞行路径上时,通过飞行设定模块实时调整飞行路径。
为实现上述第二个目的,本发明的技术方案是:一种利用障碍物信息设定无人机飞行路径的方法,采用上述利用障碍物信息设定无人机飞行路径的系统,包括以下步骤:
S1,将第三方数据源的实时障碍物信息、无人机监测的实时障碍物数据导入地图;
S2,按照所述地图和无人机的目的地,拟定无人机的飞行路径;
S3,所述无人机按照所述飞行路径进行飞行,飞行的过程中通过监测传感器对所述飞行路径上的障碍物进行监测,并将障碍物信息发送至控制中心;
S4,控制中心将障碍物信息通过地图绘制模块更新至所述地图,地图绘制模块监测到新的障碍物空间坐标时,飞行设定模块将所述障碍物空间坐标与正在飞行的无人机飞行路径进行对比;
S5,若所述障碍物空间坐标位于正在飞行的无人机飞行路径上时,返回步骤S1;若所述障碍物空间坐标没有位于正在飞行的无人机飞行路径上时,返回步骤S3;
S6,到达目的地,结束飞行。
本发明的有益效果为:
1.本发明提供的利用障碍物信息设定无人机飞行路径的系统,通过控制中心可将多个无人机监测的障碍物信息整合,进而能够得出区域内的障碍物信息,从而指导无人机在飞行时躲避所述障碍物。
2.本发明提供的利用障碍物信息设定无人机飞行路径的方法,实时更新的第三方数据源获取的障碍物信息和无人机实时监测的障碍物数据对应的空间坐标位于已拟定的无人机飞行路径上时,通过飞行设定模块调整飞行路径;可避免无人机不能及时作出反应而导致撞机的问题;因此该方法节约了财产,提高了无人机飞行的安全性。
3.超声波传感器、红外测距传感器均能测定前方的障碍物,并同时测定障碍物距无人机的距离,进而更准确的计算出障碍物的空间位置坐标。
附图说明
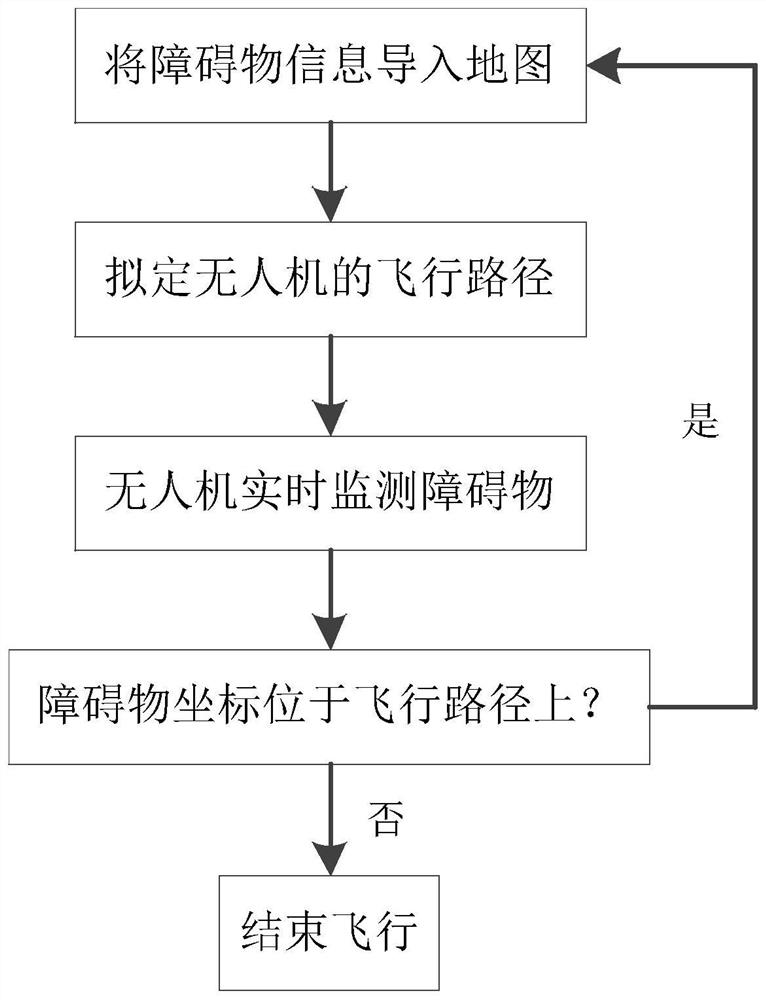
图1是本发明利用障碍物信息设定无人机飞行路径的方法流程图。
具体实施方式
以下结合附图和具体实施例对本发明的内容作进一步详细描述:
一种利用障碍物信息设定无人机飞行路径的系统,包括控制中心、无人机和第三方数据源。
第三方数据源与控制中心连接,第三方数据源将设定区域内的障碍物信息实时发送至控制中心;第三方数据源可以是当地官方发布的限制地区,或者临时建筑物信息等。
无人机的数量为多个,无人机通过无线网络与控制中心连接;无人机包括通讯单元、障碍物监测单元、飞行管控单元。
通讯单元通过网络与控制中心进行数据的发送和接收。
障碍物监测单元通过障碍物监测传感器实时监测障碍物数据,并通过通讯单元将障碍物数据发送至控制中心;因此通过控制中心可将多个无人机监测的障碍物信息整合,进而能够得出区域内的障碍物信息,从而指导无人机在飞行时躲避所述障碍物。
障碍物监测传感器为超声波传感器、红外测距传感器,超声波传感器、红外测距传感器均设置在无人机的周向。超声波传感器、红外测距传感器均能测定前方的障碍物,并同时测定障碍物距无人机的距离,进而更准确的计算出障碍物的空间位置坐标。无人机上设有高度传感器和GPS定位仪,用于辅助导航。
飞行管控单元接收到控制中心拟定的飞行路径后指导无人机飞行。
控制中心包括通讯模块、地图绘制模块、飞行设定模块。
通讯模块用于与第三方数据源、无人机进行数据的传输。
地图绘制模块将第三方数据源获取的障碍物信息和无人机监测的障碍物数据转换为空间坐标信息,并将该空间坐标信息更新至对应区域内的地图。
飞行设定模块按照更新的地图和目的地拟定无人机的飞行路径;无人机的飞行路径规避上述障碍物,并将飞行路径设置在以障碍物为中心的设定距离之外,从而使得无人机和障碍物不相互干扰并保证其安全性。
实时更新的第三方数据源获取的障碍物信息和无人机监测的障碍物数据对应的空间坐标位于已拟定的无人机飞行路径上时,通过飞行设定模块实时调整飞行路径。从而避免无人机不能及时作出反应而导致撞机的问题。
一种利用障碍物信息设定无人机飞行路径的方法,采用上述利用障碍物信息设定无人机飞行路径的系统,如图1所示,包括以下步骤:
S1,将第三方数据源的实时障碍物信息、无人机监测的实时障碍物数据导入地图;
S2,按照所述地图和无人机的目的地,拟定无人机的飞行路径;
S3,所述无人机按照所述飞行路径进行飞行,飞行的过程中通过监测传感器对所述飞行路径上的障碍物进行监测,并将障碍物信息发送至控制中心;
S4,控制中心将障碍物信息通过地图绘制模块更新至所述地图,地图绘制模块监测到新的障碍物空间坐标时,飞行设定模块将所述障碍物空间坐标与正在飞行的无人机飞行路径进行对比;
S5,若所述障碍物空间坐标位于正在飞行的无人机飞行路径上时,返回步骤S1,重新拟定飞行路径;若所述障碍物空间坐标没有位于正在飞行的无人机飞行路径上时,返回步骤S3,继续飞行并监测障碍物,直至到达目的地,结束飞行。
本发明通过及时获取障碍物信息并调整无人机飞行路径;可避免无人机不能及时作出反应而导致撞机的问题;因此该方法节约了财产,提高了无人机飞行的安全性。
以上所述仅为本发明的实施例,并非对本发明保护范围的限制,凡是利用本发明说明书及附图内容所作的等效结构变换,或直接或间接运用在其他相关的技术领域,均包括在本发明的专利保护范围内。
- 一种利用障碍物信息设定无人机飞行路径的系统和方法
- 一种面向不规则障碍物的无人机路径规划方法及系统