一种空间翻滚非合作目标观测过程中的特征信息传递与协作跟踪方法
文献发布时间:2023-06-19 09:46:20
技术领域
本发明涉及空间非合作目标姿态确定领域,具体为一种空间翻滚非合作目标观测过程中的特征信息传递与协作跟踪方法。
背景技术
对航天器间相对运动状态的估计在空间操作领域一直受到人们的高度和持续关注。其中,伴随着空间探索的不断深入和空间任务的不断升级,对于非合作目标的信息测量和参数估计必将成为在轨服务任务未来发展的方向。尤其是近年来,随着空间碎片数量指数级增长,针对空间非合作目标的空间操作的需求也随之快速增加。而对空间非合作目标的运动学状态进行精确地估计,是对其实施空间操作的前提和必要条件,也越来越受到人们的关注。
基于视觉结合卡尔曼滤波或其扩展方法对空间目标进行状态估计,目前已有了许多相关的研究,并在地面或在轨实验中得到了验证和应用。随着对空间非合作目标状态辨识的需求增加,得益于视觉传感器的被动性质,采用基于视觉的目标状态估计方法越来越多的受到人们的关注。
然而,传统的针对空间目标的辨识方法,多为针对空间合作目标进行的设计,即假定目标上存在合作的标识点,可十分方便地对标识点进行跟踪和测量。而现有的针对非合作目标的辨识方法,一般都同样假定目标部分信息已知,即存在合作的标识点或其3D几何构型已知,即在被动的视觉测量过程中,可以对目标上的一些特征点进行持续性的跟踪和测量。然而,在实际工况中,空间非合作目标的几何构型很可能是未知的,也不存在可用的合作标识点,因此需要从被动视觉图像中实时地提取特征点并进行跟踪。
此外,在空间环境下,非合作目标由于自身轨道姿态控制能力丧失,另外在漂浮状态,在外界干扰力的作用下常处于自由翻滚状态(参考其他文献将空间非合作目标的运动状态描述出来),而且,由于非合作目标的质心位置和惯性参数未知,以及其惯性主轴和旋转轴以及之间的耦合效应,可能存在复杂的章动现象。因此,基于单一观测航天器对空间非合作目标进行观测,不可避免的会出现特征点遮蔽的现象,即无法实现对非合作目标的持续有效观测。
发明内容
针对现有技术中单一观测航天器针对空间翻滚非合作目标观测性能存在特征点遮蔽的现象,本发明提供一种空间翻滚非合作目标观测过程中的特征信息传递与协作跟踪方法,通过卫星编队协作观测和跟踪,以及特征信息的星间传递,提高对空间非合作目标的观测性能和效率,有效解决特征点被遮蔽的现象。
本发明是通过以下技术方案来实现:
一种空间翻滚非合作目标观测过程中的特征信息传递与协作跟踪方法,包括如下步骤,
步骤1,选取多颗卫星构成观测卫星编队,各观测卫星围绕空间非合作目标相对运动,各观测卫星分别对应空间非合作目标的各个角度进行持续观测,获取相应的图像信息集合;
步骤2,对各个观测卫星获取的图像信息分别进行特征提取,并在时序图像序列中进行持续跟踪;
步骤3,在时序图像序列的持续跟踪中,当观测卫星所跟踪的特征点出现遮蔽现象时,所观测到遮蔽现象的观测点将遮蔽的特征点和特征信息传递给能够完全观测到该特征点的另一个观测卫星中,并通过所传递的观测卫星在获取的图像中对特征点继续跟踪;
步骤4,整合特征跟踪路径,得到连续跟踪过程中的目标特征点的运动轨迹。
优选的,步骤1中,各个观测卫星采用被动视觉传感器分别对应空间非合作目标的各个角度进行持续观测。
优选的,步骤1中,各观测卫星分别对应空间非合作目标的各个角度进行持续观测,所获取相应的图像信息集合沿时间序列分布。
优选的,步骤1中,各个卫星通过采用SIFT特征算子获取第一张图像,并对第一张图像进行特征提取。
优选的,步骤2中,各卫星通过采用LK光流法获取时序图像序列对空间翻滚非合作目标进行协作跟踪。
优选的,步骤3中,各个观测卫星之间通过星间通信对特征点和特征信息进行传递。
优选的,步骤4,以一个卫星作为主观测卫星通过星间通信将全部卫星所观测的图像信息和特征信息进行传递收集。
优选的,步骤4,在一个卫星中对所收集的图像信息进行拼接,整合全部图像信息中的特征点运动轨迹得到连续跟踪过程中的目标特征点的运动轨迹。
与现有技术相比,本发明具有以下有益的技术效果:
本发明提供一种空间翻滚非合作目标观测过程中的特征信息传递与协作跟踪方法,通过卫星编队协作观测,利用各观测卫星分别对应空间非合作目标的各个角度进行持续观测以获取相应的图像信息,对各观测卫星获取首张的图像信息分别进行特征提取处理,并在时序图像序列中进行持续跟踪;在持续观测过程中,当某观测卫星所跟踪的特征点由于目标旋转而处于遮蔽状态时,将特征点和特征信息传递给可能的下一卫星,以实现对特征点的持续跟踪;通过整合特征点的跟踪路径,得到连续跟踪过程中的目标特征点的运动轨迹,提高对空间翻滚非合作目标的观测性能和效率。
进一步的,各个观测卫星采用被动视觉传感器分别对应空间非合作目标的各个角度进行持续观测,在不同角度对空间非合作目标进行协作观测,提高了观测效率,保证获取完整的图像信息。
进一步的,各观测卫星分别对应空间非合作目标的各个角度进行持续观测,所获取相应的图像信息集合沿时间序列分布,通过获取的先后顺序对图像信息进行处理,便于后续对图像特征点的识别。
进一步的,各个卫星通过采用SIFT特征算子获取第一张图像,通过SIFT特征检测算子得到精确的特征点位置信息,通过所获取到的第一张图像,便于记录起点的观测信息。
进一步的,各卫星通过采用LK光流法获取时序图像序列对空间翻滚非合作目标进行协作跟踪,光流法是一种具有代表性的局部光流法,通过利用提取的特征点信息,可以有效地提高光流的准确性并减少计算时间。
进一步的,各个观测卫星之间通过星间通信对特征点和特征信息进行传递,搭建了观测卫星之间的信息传递桥梁,便于将遮蔽的特征点通过信息传递进行观测,提高观测效率。
进一步的,以一个卫星作为主观测卫星通过星间通信将全部卫星所观测的图像信息进行传递收集,并对所收集的图像信息进行拼接,整合所收集的图像信息中特征点运动的轨迹,以一个卫星为主观测卫星对特征点进行整合,提高对空间非合作目标的观测性能和效率。
附图说明
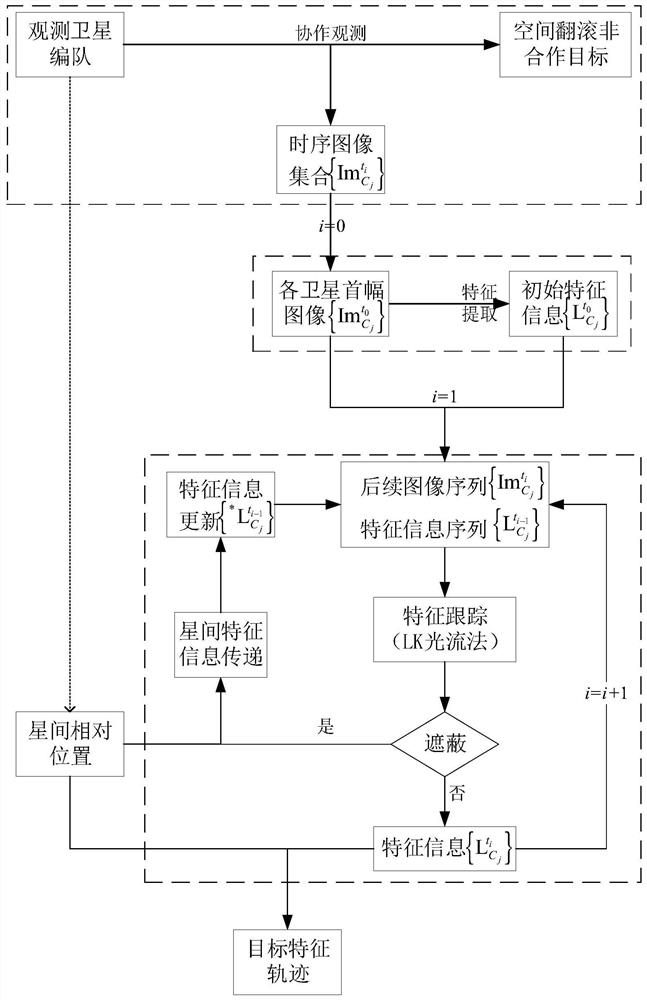
图1为本发明中方法的简易计算流程框架图;
图2为本发明中SIFT特征算子的简易流程图;
图3为本发明中多航天器协作观测特征信息跟踪及信息传输简示图。
具体实施方式
下面结合具体的实施例对本发明做进一步的详细说明,所述是对本发明的解释而不是限定。
本发明提供一种空间翻滚非合作目标观测过程中的特征信息传递与协作跟踪方法,针对空间非合作目标如图1所示,选取多颗卫星构成观测卫星编队。利用各观测卫星所配置的被动视觉传感器,分别对应空间非合作目标的各个角度进行持续观测,获取相应的沿时间序列分布的图像信息集合
针对各卫星获得的首幅图像
基于各卫星获取的第一张图像中提取得到的特征点位置和特征信息,在其后续的时序图像信息集合
在空间非合作目标旋转过程中,基于对空间非合作目标姿态运动信息的估计,以及各观测卫星间的相对位姿信息,按照目标的旋转方向,对观测卫星编队进行循环排序。当某观测卫星所跟踪的某个特征点处于遮蔽状态时,通过星间通信将该特征点和特征信息传递给下一颗观测卫星,实现对特征信息集合
最后,选取观测卫星编队中的一颗卫星作为主观测卫星,并以此为基础对特征点运动轨迹进行整合,并最终获得空间非合作目标连续观测过程中的特征点的运动轨迹,提高对空间非合作目标的观测性能和效率。
多航天器协作观测特征信息跟踪及传输简示图如图3所示,多颗观测航天器按照翻滚目标的相对旋转方向按A、B、C、D…排序,在观测航天器A获取的目标图像序列中,对检索到的特征点进行特征跟踪的过程中,由于目标翻滚和相对旋转运动,会出现特征遮蔽的现象。此时,利用星间通信,将跟踪的特征信息传递给下一颗观测卫星A,而由于下一颗观测卫星的相对视点位置和观测姿态变迁,在观测卫星A的视点中被遮蔽的特征可以在观测卫星B的视点有效的跟踪。如此特征信息在循环排序的观测卫星编队A、B、C、D…中进行传输以保证对特征点的持续跟踪,并最终又传输回第一颗观测卫星A,构成协作观测和特征跟踪循环。
本发明一种空间翻滚非合作目标观测过程中的特征信息传递与协作跟踪方法,具体包括如下步骤:
步骤1,选取多颗卫星构成观测卫星编队,各观测卫星围绕空间非合作目标相对运动,各观测卫星分别对应空间非合作目标的各个角度进行持续观测,获取相应的图像信息集合;
步骤2,对各个观测卫星获取的图像信息分别进行特征提取,并在时序图像序列中进行持续跟踪;
步骤3,在时序图像序列的持续跟踪中,当观测卫星所跟踪的特征点出现遮蔽现象时,所观测到遮蔽现象的观测点将遮蔽的特征点和特征信息传递给能够完全观测到该特征点的另一个观测卫星中,并通过所传递的观测卫星在获取的图像中对特征点继续跟踪;
步骤4,整合特征跟踪路径,得到连续跟踪过程中的目标特征点的运动轨迹。
其中,SIFT特征算子是一类非常成熟的特征检测算子,其基本流程如图2所示,分为特征点位置检测和特征点描述符获取两个部分。首先,生成高斯差分金字塔(DOG金字塔)并构建尺度空间,进行空间极值点检测,对尺度空间中检测到的局部极值点进行进一步的筛选,去除不稳定和错误检测出的极值点以稳定关键点的精确定位,从而得到精确的特征点位置信息。随后,通过对各个极值点的梯度求解,为精确而稳定的关键点分配方向信息,以保证关键点对图像角度和旋转具有不变性。对各个关键点,分别利用4×4×8共128维向量的描述子进行表征,并对特征向量的长度进行归一化,最终获得特征点对应的特征描述符。
光流法是一种目前已经非常成熟的特征点跟踪技术,其利用图像序列中像素在时间域上的变化以及相邻帧之间的相关性来找到上一帧跟当前帧之间存在的对应关系,从而计算出相邻帧之间物体的运动信息,实现对特征点的持续跟踪。其中,Lucas&Kanade(LK)光流法是一种具有代表性的局部光流法,通过利用提取的特征点信息,可以有效地提高光流的准确性并减少计算时间。
实施例
根据图3所示,选取围绕空间非合作目标做相对运动的4颗观测航天器,分别命名为A、B、C、D,利用各观测卫星所配置的被动视觉传感器,从4个不同角度分别对空间非合作目标进行持续观测,以持续获取相应的沿时间序列分布的图像信息集合。以t
随着时间的进行,各观测卫星相对于非合作目标的相对轨道和姿态在观测过程中的持续变化,在特征点跟踪过程中可能出现遮蔽现象。例如,观测卫星A获取的首幅图像中通过特征提取获得了某个特征点,并在后续图像中进行特征跟踪。而在跟踪观测过程中,观测卫星A相对于非合作目标的相对位置和观测姿态同样会持续变化。而当两者处于一定的相对位置和观测姿态,或者相对位姿变化超过了一定阈值,特征点所对应的目标标识点可能会被目标本身的构件所遮蔽,或者旋转到了目标相对于视点的背面,即出现了遮蔽现象,观测卫星A本身无法继续对该特征点继续进行跟踪。此时,基于对空间非合作目标姿态运动信息的估计,以及各观测卫星间的相对位姿信息,将观测卫星A无法继续跟踪的特征点和特征信息传递给观测卫星B,而在观测卫星B的视角中,该特征点并未被遮蔽,因此可以在观测卫星B所在视点获取的后续图像序列中继续对传递的特征点进行跟踪。当该特征点在观测卫星B的视角中出现遮蔽现象时,继续传递给卫星C……如此循环反复,实现对特征点的持续跟踪。
最后,选择观测卫星A作为主观测卫星,并以此为基础,依据观测过程中各观测卫星B、C、D相对于观测卫星A的相对轨道运动轨迹和相对姿态运动轨迹变化,对特征点运动轨迹进行整合,并最终获得空间非合作目标连续观测过程中的特征点的运动轨迹,提高对空间非合作目标的观测性能和效率。
以上内容是对本发明所作的进一步详细说明,不能认定本发明的具体实施方式仅限于此,对于本发明所属技术领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干简单的推演或替换,都应当视为属于本发明由所提交的权利要求书确定发明保护范围。
- 一种空间翻滚非合作目标观测过程中的特征信息传递与协作跟踪方法
- 基于高阶滑模控制和扰动观测器的空间翻滚非合作目标自主交会制导方法