一种卫星机械臂末端与维修模块标准化机械接口装置
文献发布时间:2023-06-19 09:54:18
技术领域
本发明涉及一种卫星机械臂末端与维修模块标准化机械接口装置,属于在轨 构建技术领域。
背景技术
多任务在轨服务技术其优点是针对卫星在轨维护任务的不确定性、复杂性, 通过更换机械臂末端模块的方式解决了所需服务工具的多样性需求,进而实现碎 片清除、燃料加注延寿等任务。卫星机械臂携带卫星机械臂末端与维修模块机械 接口装置是多任务在轨服务技术的重要组成部分。目前尚无关于卫星机械臂末端 与维修模块标准化机械接口装置,因此,本发明为多任务在轨服务技术提供一种 卫星机械臂末端与维修模块机械标准化接口装置。
发明内容
本发明的目的是为了解决多任务在轨服务所需维修工具的多样性需求,进而 提供一种卫星机械臂末端与维修模块机械接口装置
本发明的目的是通过以下技术方案实现的:
一种卫星机械臂末端与维修模块标准化机械接口装置,包括:母头外圈、母 头紧固杆、母头限位槽、公头外圈、限位珠、弹簧、支撑螺栓、支撑盘、支撑横 杆、紧固爪、H形横连杆、底支座、机械臂固定环、第一螺栓、第一螺纹孔、第 二螺栓、第二螺纹孔、第三螺栓、第三螺纹孔,第四螺栓、第五螺栓、第六螺栓、 镂空孔和第四螺纹孔,所述母头外圈开有母头限位槽,并在母头外圈内侧中心点 开有第一螺纹孔,通过第一螺栓固连母头紧固杆,限位珠连接弹簧,弹簧连接支 撑螺栓连接在第四螺纹孔,支撑盘通过第二螺栓和第二螺纹孔与公头外圈相连 接,支撑横杆通过第三螺栓和第三螺纹孔与支撑盘相连接,支撑横杆通过第四螺 栓与紧固爪相连接,紧固爪通过第五螺栓与H形横连杆相连接,H形横连杆通过 第六螺栓与底支座相连接,底支座可在机械臂固定环内滑动,支撑盘开有镂空孔。
本发明为多任务在轨服务技术提供一种卫星机械臂末端与维修模块机械标 准化接口装置,通过更换机械臂末端模块的方式解决了在轨服务维修工具的多样 性需求,实现了不同功能模块皆可方便的搭载在机械臂上,是多任务在轨服务技 术的重要组成部分。
本发明一种卫星机械臂末端与维修模块机械标准化接口装置的有益效果:
1、四个间隔90°的紧固爪能够牢牢抓紧椭球形母头紧固杆,只有控制紧固爪 张开才能解锁,体现了良好的固定能力。2、紧固爪内侧面与母头紧固杆外形尺 寸相同,在紧固爪扣紧时,能够完全贴合。3、母头紧固杆为标准序列化尺寸, 可用于多合作目标情境下。4、公头外圈设有八个螺纹孔,便于安装支撑盘。5、 支撑盘上设有八个螺纹孔,便于安装支撑横杆及紧固爪。6、底支座由外部驱动, 整个装置非控制自由度为零,控制自由度为一,可以通过控制底支座与机械臂固 定环相对位置间接控制开合角度。7、母头外圈与公头外圈皆为变尺寸结构,能 完全贴合并可实现存在对接误差情况下的自动矫正。8、限位珠可在对接后卡在 限位槽中,加固了对接强度,且实现了允许紧固爪完全开合仅在限位珠卡在限位槽后再抓紧,增加了对接的成功率。9、母头紧固杆通过螺纹孔与螺栓连接,安 装方便。10、支撑横杆内部设有凹槽,可以嵌合在支撑盘上,加固刚性连接。
附图说明
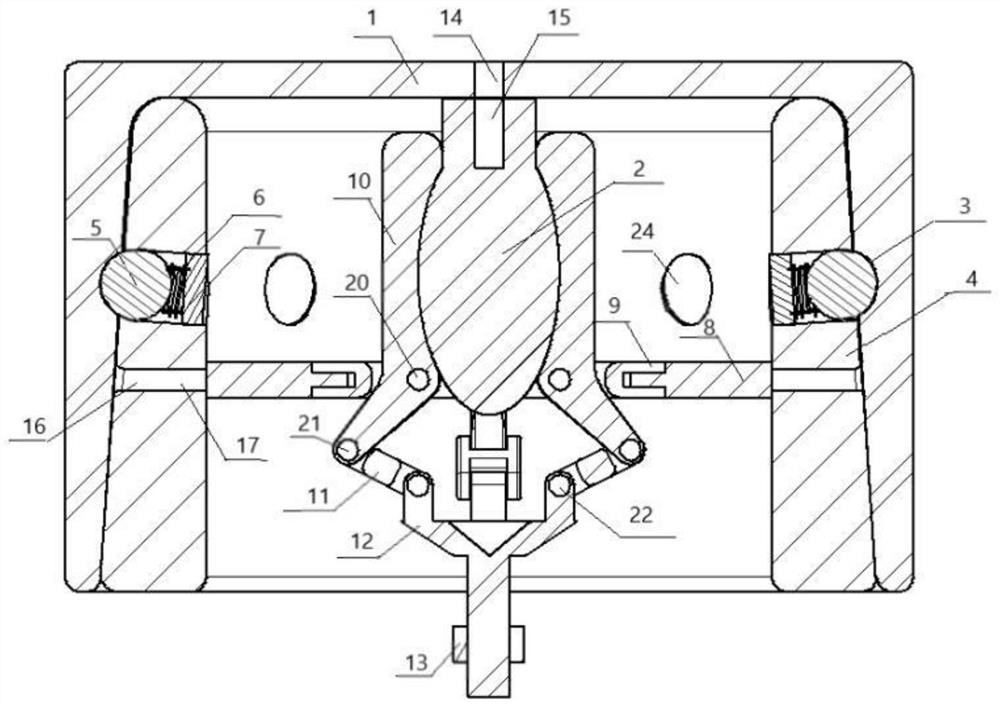
图1为本发明一种卫星机械臂末端与维修模块标准化机械接口装置的结构 剖面示意图。
图2为发明一种卫星机械臂末端与维修模块标准化机械接口装置的俯视 图。(其中不含母头外圈1、母头紧固杆2和母头限位槽3)
图3为本发明一种卫星机械臂末端与维修模块标准化机械接口装置的斜剖轴 侧示意图。
图4为本发明一种卫星机械臂末端与维修模块标准化机械接口装置仰角轴侧 示意图。
图中的附图标记,1为母头外圈,2为母头紧固杆,3为母头限位槽,4为公头 外圈,5为限位珠,6为弹簧,7为支撑螺栓,8为支撑盘,9为支撑横杆,10为紧 固爪,11为H形横连杆,12为底支座,13为机械臂固定环,14为第一螺栓,15为 第一螺纹孔,16为第二螺栓,17为第二螺纹孔,18为第三螺栓,19为第三螺纹孔, 20为第四螺栓,21为第五螺栓,22为第六螺栓,23为镂空孔,24为第四螺纹孔。
具体实施方式
下面将结合附图对本发明做进一步的详细说明:本实施例在以本发明技术方 案为前提下进行实施,给出了详细的实施方式,但本发明的保护范围不限于下述 实施例。
如图1—图4所示,本实施例所涉及的一种卫星机械臂末端与维修模块标准化机械接 口装置,包括:母头外圈1、母头紧固杆2、母头限位槽3、公头外圈4、限位珠5、弹簧 6、支撑螺栓7、支撑盘8、支撑横杆9、紧固爪10、H形横连杆11、底支座12、机械臂固 定环13、第一螺栓14、第一螺纹孔15、第二螺栓16、第二螺纹孔17、第三螺栓18、第三 螺纹孔19,第四螺栓20、第五螺栓21、第六螺栓22、镂空孔23和第四螺纹孔24;
所述母头外圈1开有母头限位槽3,并在母头外圈1内侧中心点开有第一螺纹 孔15,通过第一螺栓14固连母头紧固杆2,限位珠5连接弹簧6,弹簧6连接支撑螺 栓7,支撑螺栓7可与第四螺纹孔24固连,支撑盘8通过第二螺栓16和第二螺纹孔 17与公头外圈4相连接,支撑横杆9通过第三螺栓18和第三螺纹孔19与支撑盘8相 连接,支撑横杆9通过第四螺栓20与紧固爪10相连接,紧固爪10通过第五螺栓21 与H形横连杆11相连接,H形横连杆11通过第六螺栓22与底支座12相连接,底支 座12可在机械臂固定环13内滑动,支撑盘8开有镂空孔23。
所述紧固爪8数量为四个,间隔90°分布,对应角度为20°,在对接前保持张 开状态,且当公头外圈4插入母头外圈1,限位珠卡5到母头限位槽3以后再锁紧。
所述第四螺纹孔24在距离公头外圈4轴心远端一侧尺寸比近端一侧小,使得 限位珠5可部分伸出第四螺纹孔24。
所述支撑螺栓7可固定在第四螺纹孔24距离公头外圈4轴心近端一侧。
所述底支座12可由外部驱动,在机械臂固定环13沿着底支座12轴心滑动,进 而由第六螺栓22带动H形横连杆11,H形横连杆11带动第五螺栓21进而驱动紧固 爪10,紧固爪10通过第四螺栓20与支撑横杆9形成旋转副,支撑横杆9可与支撑盘 8固连,进而形成含驱动自由度为零,不含驱动自由度为一的可控机构。
实施例1
如图1和图3所示,母头外圈1开有母头限位槽3,并在母头外圈1内侧中心点 开有第一螺纹孔15,母头外圈1通过第一螺栓14固连母头紧固杆2,母头紧固杆2 为标准序列化尺寸,可用于多合作目标情境下,并且母头紧固杆2通过第一螺纹 孔15与第一螺栓14连接,安装方便。
限位珠5在第四螺纹孔24内最外端连接弹簧6,弹簧6支撑在支撑螺栓7上,支 撑螺栓7可与第四螺纹孔24固连,支撑螺栓7可固定在第四螺纹孔24距离公头外圈 4轴心近端一侧。公头外圈4内部开有第四螺纹孔24,并且第四螺纹孔24在距离公 头外圈4轴心远端一侧尺寸比近端一侧小,可以使得限位珠5可部分伸出第四螺纹 孔24;公头外圈4设有八个螺纹孔,便于安装支撑盘8。上述得母头外圈1与公头 外圈4皆为变尺寸结构,能完全贴合并可实现存在对接误差情况下的自动矫正。 限位珠5可在对接后卡在母头限位槽3中,加固了对接强度,且实现了允许紧固爪 10完全开合仅在限位珠5卡在母头限位槽3后再抓紧,增加了对接的成功率。
支撑盘8外圈通过第二螺栓16和第二螺纹孔17与公头外圈4相连接,支撑盘8 上设有八个螺纹孔,便于安装支撑横杆9及紧固爪10。
如图2所示,支撑横杆9通过第三螺栓18穿过第三螺纹孔19与支撑盘8刚性固 定,支撑横杆9通过第四螺栓20与紧固爪10相连接,紧固爪10通过第五螺栓21与 H形横连杆11相连接,所述紧固爪10数量为四个,间隔90°分布,对应角度为20°, 在对接前保持张开状态,且当公头外圈4插入母头外圈1,限位珠卡5到母头限位 槽3以后再锁紧。四个间隔90°的紧固爪10能够牢牢抓紧椭球形母头紧固杆2,只 有控制紧固爪10张开才能解锁,体现了良好的固定能力。紧固爪10内侧面与母头 紧固杆2外形尺寸相同,在紧固爪10扣紧时,能够完全贴合。
如图4所示,紧固爪10与H形横连杆11通过第五螺栓21连接,H形横连杆11通过第六螺栓22与底支座12相连接,底支座12可在机械臂固定环13内滑动,支撑盘8开 有镂空孔23。底支座12可由外部驱动,在机械臂固定环13沿着底支座12轴心滑动, 可以通过控制底支座12与机械臂固定环13相对位置间接控制开合角度,进而由第 六螺栓22带动H形横连杆11,H形横连杆11带动第五螺栓21进而驱动紧固爪10, 紧固爪10通过第四螺栓20与支撑横杆9形成旋转副,支撑横杆9可与支撑盘8固连, 进而形成含驱动自由度为零,不含驱动自由度为一的可控机构。支撑横杆9内部 设有凹槽,支撑盘8上设置有突出部分,支撑横杆9可以嵌合在支撑盘8上,加固 刚性连接。
本实施例的创新点包括:1、传统三爪式进靠爪前端捕捉,捕捉不可靠,本 实施例采用面接触形式且加入限位珠,从而极大提高锁紧快速性;2、对接容差 大,可适应不同非精确对接环境,其母头外轮廓设计可有效在对接过程中对固紧 爪进行导向;3、自锁能力高,母头外轮廓与固紧爪具有自锁性,在垂直外力作 用下不会引起锁紧失效,提高锁定可靠性。
以上所述,仅为本发明较佳的具体实施方式,这些具体实施方式都是基于本 发明整体构思下的不同实现方式,而且本发明的保护范围并不局限于此,任何熟 悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到的变化或替 换,都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应该以权利要 求书的保护范围为准。
- 一种卫星机械臂末端与维修模块标准化机械接口装置
- 一种卫星机械臂末端与维修模块标准化机械接口装置