一种电动固定翼飞机电磁正反桨动力装置
文献发布时间:2023-06-19 09:54:18
技术领域
本发明涉及电动固定翼飞机领域,具体是指一种电动固定翼飞机电磁正反桨动力装置。
背景技术
随着电动无人机,电动飞机等新能源飞机的普及与发展以及电动无人机在军事科技领域的广泛应用,世界对电动固定翼飞机的功能性要求越来越高,传统的燃油飞机的螺旋桨变距方式已不再适用纯电力驱动的飞机,传统燃油飞机的螺旋桨变距采用液压油或滑油来驱动,具备体积大、整体重的特点,不适合纯电力驱动的飞机。
为了解决上述问题,一种纯电力驱动的电磁正反桨动力装置应运而生。
发明内容
本发明要解决的技术问题是纯电力固定翼飞机反桨减速的问题
为解决上述技术问题,本发明提供的技术方案为:一种电动固定翼飞机电磁正反桨动力装置,包括电磁正反桨结构和正反桨控制电路,所述电磁正反桨结构包括为变距杆、变矩机构,空心轴无刷电机、双向自保持电磁铁、电机安装座和双向自保持电磁铁安装座,所述变距杆和双向自保持电磁铁之间设置有联轴器,所述电磁铁安装座和电机安装座之间设置有连接双头螺杆,所述变矩机构、空心轴无刷电机和双向自保持电磁铁三者同轴布置,所述变矩机构设置在主轴的前端;
所述正反桨控制电路电性连接在电磁铁上,所述正反桨控制电路包括电子调速器、电源、接收器、电子开关和延时继电器,所述电子开关包括第一电子开关和第二电子开关,所述延时继电器包括第一延时继电器、第二延时继电器和第三延时继电器,所述接收器的一端与电调电性连接,所述接收器的另一端与电子开关电性连接,所述第二电子开关分别与第一延时继电器、第二延时继电器和第三延时继电器电性连接,所述第一电子开关、第二电子开关通过第一延时继电器、第二延时继电器和第三延时继电器来控制相对应的触点,实现动固定翼飞机电磁正反桨过程。
进一步地,所述双向自保持电磁铁的一端通过联轴器固定在变距杆上。
进一步地,所述连接双头螺杆的一端与电机安装座连接,所述连接双头螺杆的另一端电磁铁安装座连接。
进一步地,所述接收机用于接收信号,将信号同时传输给第一电子开关和第二电子开关。
进一步地,所述第一电子开关和第二电子开关分别控制正反桨控制主电路和第一延时继电器、第二延时继电器、第三延时继电器是否得电。
发明与现有技术相比的优点在于:本发明采用上述结构,能够在不改变电动固定翼飞机包括电动无人机,电动飞机和电动航空模型飞机电机转向的情况下实现电动固定翼飞机的反推减速和地面倒车以及紧急中止起飞。本装置机械结构和电气控制两个部分相互独立,便于维修和更换件,成本低廉,结构紧凑,体积小,重量轻,可靠性高,操作简单,功能显著,新颖实用。同时该装置符合未来电动飞机螺旋桨正反桨的各种要求,应用前景广阔。
附图说明
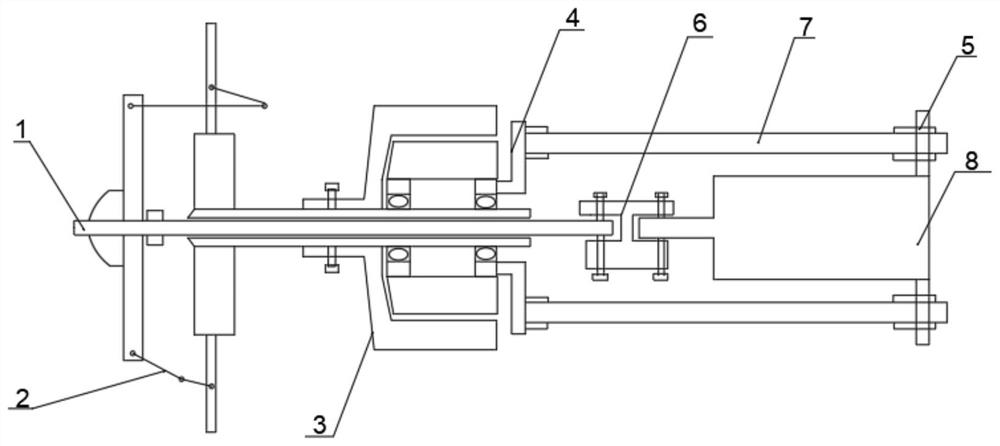
图1是本发明一种电动固定翼飞机电磁正反桨动力装置的结构示意图;
图2是电磁正反桨动力装置及原理图;
图3是第一电子开关与正反桨控制主电路原理图;
图4是第二电子开关与延时继电器触点控制原理图。
如图所示:1、变距杆,2、变矩机构,3、空心轴无刷电机,4、电机安装座,5、电磁铁安装座,6、联轴器,7、连接双头螺杆,8、双向自保持电磁铁。
其中,图中1#、2#、3#分别为第一、第二和第三。
具体实施方式
下面结合附图对本发明做进一步的详细说明。
结合附图,对本发明进行详细介绍。
本发明在具体实施时提供了一种电动固定翼飞机电磁正反桨动力装置,包括电磁正反桨结构和正反桨控制电路,所述电磁正反桨结构包括为变距杆1、变矩机构2、空心轴无刷电机3、双向自保持电磁铁8、电机安装座4和双向自保持电磁铁安装座5,所述变距杆1和双向自保持电磁铁8之间设置有联轴器6,所述电磁铁安装座5和电机安装座4之间设置有连接双头螺杆7,所述变矩机构2、空心轴无刷电机3和双向自保持电磁铁8三者同轴布置,所述变矩机构2设置在主轴的前端;
所述正反桨控制电路电性连接在电磁铁上,所述正反桨控制电路包括电子调速器、电源、接收器、电子开关和延时继电器,所述电子开关包括第一电子开关和第二电子开关,所述延时继电器包括第一延时继电器、第二延时继电器和第三延时继电器,所述接收器的一端与电调电性连接,所述接收器的另一端与电子开关电性连接,所述电子开关分别与第一延时继电器、第二延时继电器和第三延时继电器电性连接,所述第一电子开关、第二电子开关通过第一延时继电器、第二延时继电器和第三延时继电器来控制相对应的触点,实现动固定翼飞机电磁正反桨过程。
所述双向自保持电磁铁8的一端通过联轴器6固定在变距杆1上。所述连接双头螺杆7的一端与电机安装座4连接,所述连接双头螺杆7的另一端电磁铁安装座4连接。所述接收机用于接收信号,将信号传输同时给第一电子开关和第二电子开关。所述第一电子开关和第二电子开关分别控制正反桨控制主电路和第一延时继电器、第二延时继电器、第三延时继电器是否得电。
本发明的具体实施方式如下:本装置采用双向自保持电磁铁作为正反桨动力来源,给双向自保持电磁铁通正电,双向自保持电磁铁8产生排斥力,将变距杆1往前推,变距杆1带动变距机构2使得桨叶变为反桨状态,实现反桨。反桨信号来自航模遥控器的五通道,当航模落地需要反桨减速或地面倒车时,爱好者接通五通道电门,反桨信号被航模接收机接收到,接收机将信号同时发给第一电子开关和第二电子开关,两个电子开关协同工作分别控制正反桨电气控制主电路和3个延时继电器来使电磁铁得正电,双向自保持电磁铁8得正电产生排斥力,将变距杆往前推,变距杆带动变距机构使得桨叶变为反桨状态,从而实现反桨反推减速和倒车功能。反之当需要停止反桨或前进时,航模爱好者关闭五通道的电门,停止反桨信号被接收机收到,接收机将信号发给两个电子开关,两个电子开关分别控制正反桨电气控制主电路和3个延时继电器给电磁铁接负电,双向自保持电磁铁8产生吸引力,将变距杆往后拉,变距杆带动变距机构2使得桨叶变为正桨状态,重新产生正拉力。以上是以变距杆推出反桨为例讲解反桨原理,反接双向自保持电磁铁8的电源两极同时改变电磁铁的正桨状态即推出态为正桨叶状态,那么此时接通反桨开关,变距杆吸回为反桨状态
本发明采用延时继电器控制触点的原理如下:触点共包括触点1、触点2、触点3、触点4和触点5,触点1、触点2和触点5为常开触点,触点3和触点4为常闭触点,其中,触点1和触点3由第一延时继电器受第二电子开关no—com开闭控制;触点2和触点4由第二延时继电器受第二电子开关no--com开闭控制;触点5由第三延时继电器受第二电子开关com--nc开闭控制。
以上对本发明及其实施方式进行了描述,这种描述没有限制性,附图中所示的也只是本发明的实施方式之一,实际的结构并不局限于此。总而言之如果本领域的普通技术人员受其启示,在不脱离本发明创造宗旨的情况下,不经创造性的设计出与该技术方案相似的结构方式及实施例,均应属于本发明的保护范围。
- 一种电动固定翼飞机电磁正反桨动力装置
- 一种电动固定翼飞机电磁正反桨动力装置