无人飞行器
文献发布时间:2023-06-19 09:54:18
技术领域
本发明涉及一种用来运输货物的无人飞行器。
背景技术
近年来,对能够沿垂直方向起飞着陆的无人飞行器的利用越来越广泛,其被称为无人机。无人飞行器的利用领域之一是货物运输。例如,现正研究用无人飞行器向孤岛运输货物。在这种用无人飞行器进行运输的情况下,存在无人飞行器于飞行中降落在海上的可能性。为了防止无人飞行器降落在水上时被淹没,有效的是在无人飞行器设置浮舟。下述专利文献1及2中揭示的无人飞行器虽然并非用于运输货物,但具有浮舟。
背景技术文献
专利文献
专利文献1:国际公开2018/042610号
专利文献2:日本专利特开2015-117003号公报
发明内容
[发明要解决的问题]
运输货物的无人飞行器重量相对较大,因此,为了避免飞行器被水淹没,需要增大浮舟的尺寸。然而,如果增大浮舟的尺寸来获得充分浮力,那么浮舟会导致飞行中的空气阻力变大。
[解决问题的技术手段]
(1)本发明提出的无人飞行器具有:多个螺旋桨;多个马达,分别驱动所述多个螺旋桨;装置主体,包含控制所述多个马达的控制装置、及进行信号发送与信号接收中的至少一种的无线装置;货物容器,用来收容货物;及浮舟。当将所述无人飞行器置于水上时,因所述浮舟的浮力及与所述货物容器的容积相应的浮力,水面至少不会达到所述无线装置的高度。
根据该构造,不仅利用浮舟的浮力,还利用货物容器的浮力,因此可实现浮舟的小型化。结果为,可减小因浮舟所产生的飞行中的空气阻力。另外,即使在无人飞行器掉落至水面的情况下,无线装置也能工作,因此能够降低使用者丢失无人飞行器的风险。
(2)在(1)的无人飞行器中,在所述浮舟的浮力发挥作用,而与所述货物容器的容积相应的浮力不发挥作用的状态下将所述无人飞行器置于水上时,水面可达到电池、所述马达及所述装置主体中的至少一个零件的高度。换言之,可利用尺寸较小的浮舟,以允许水面达到该至少一个零件的高度。这样一来,能够进一步减小因浮舟所产生的飞行阻力。
(3)在(1)或(2)的无人飞行器中,所述货物容器具有构成所述货物容器的底面的底壁部、及构成所述底面以外的多个面的多个壁部。至少所述多个壁部可液密性地构成。由此,在无人飞行器掉落至水面的情况下,能够获得与货物容器的容积相应的浮力。
(4)在(1)至(3)中任一项的无人飞行器中,所述浮舟的至少一部分的位置可高于包含所述货物容器的底面的水平面。由此,浮舟的高度接近飞行器100的重心高度,因此能够提升无人飞行器的姿势稳定性。
(5)在(1)至(4)中任一项的无人飞行器中,所述浮舟可与包含所述无人飞行器的重心的水平面交叉。由此,浮舟的高度接近飞行器100的重心高度,因此能够提升无人飞行器的姿势稳定性。
(6)在(1)至(5)中任一项的无人飞行器中,当俯视所述无人飞行器时,所述装置主体被所述多个螺旋桨包围,当俯视所述无人飞行器时,所述浮舟的位置可在水平方向上与所述装置主体分离。由此,能够提升无人飞行器的姿势稳定性。
(7)在(1)至(5)中任一项的无人飞行器中,俯视下所述无人飞行器的中心至所述浮舟的距离可小于俯视下所述无人飞行器的中心至所述多个螺旋桨的中心的距离。由此,能够防止浮舟对通过螺旋桨旋转所形成的空气流产生影响。
(8)(1)至(7)中任一项的无人飞行器可还具有支撑框架,当所述无人飞行器着陆时,所述支撑框架与地面接触而支撑所述无人飞行器。所述浮舟可安装在所述支撑框架。由此,能够简化浮舟的安装构造。
(9)在(8)的无人飞行器中,所述浮舟可位于所述支撑框架的下端。由此,当无人飞行器着陆时,浮舟接触地面,能够作为缓冲材发挥功能。
(10)在(8)的无人飞行器中,所述浮舟可位于比所述支撑框架的下端高的位置。由此,能够确保无人飞行器着陆时地面与货物容器之间有足够的距离。另外,能够使浮舟的位置接近无人飞行器的重心高度。结果为,能够提升无人飞行器在水上的姿势稳定性。
(11)在(1)至(10)中任一项的无人飞行器中,所述多个浮舟各自在上下方向上的尺寸可小于所述多个浮舟各自在前后方向上的尺寸及左右方向上的尺寸。由此,能够减小因浮舟所产生的飞行时的空气阻力。
(12)(1)至(11)中任一项的无人飞行器可还具有能够展开的降落伞。由此,当无人飞行器下降时,能够使无人飞行器的姿势稳定。
附图说明
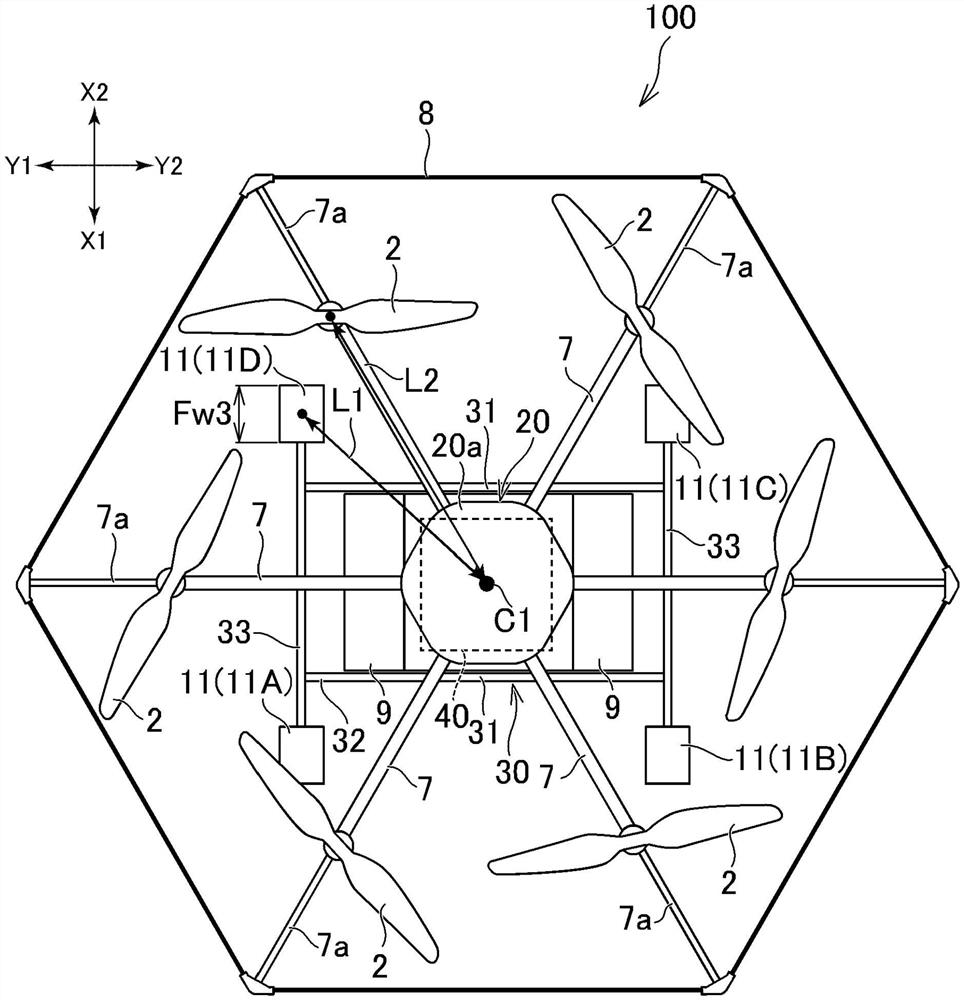
图1是表示本发明提出的无人飞行器的一例的俯视图。
图2是图1所示的无人飞行器的侧视图。
图3是表示无人飞行器的构成的框图。
图4是表示构成货物容器的底壁部的门打开的情况的侧视图。
图5是表示无人飞行器受海上波浪影响而倾斜的情况的示意图。
图6是表示浮舟的位置的变化例的侧视图。
图7是表示浮舟的位置的另一变化例的图。
图8是表示浮舟的位置及货物容器的形状的变化例的图。
图9是表示具有降落伞的无人飞行器的示例的图。
具体实施方式
以下,对本发明提出的无人飞行器的实施方式进行说明。本说明书中,作为一例,对图1等所示的无人飞行器100进行说明。
以下,将图2所示的Z1方向及Z2方向分别称为上方及下方,将图2所示的Y1方向及Y2方向分别称为前方及后方。另外,将图1所示的X1方向及X2方向分别称为右方及左方。将沿着X1-X2及Y1-Y2所形成的平面的方向称为水平方向。
[整体概要]
无人飞行器100是用来运输货物的飞行器(以下,将无人飞行器100简称为飞行器)。例如,飞行器100运输生活用品、食材、电子设备、书籍等各种商品。飞行器100例如用于向隔海的孤岛运输货物。飞行器100可以是通过无线方式被远程操纵的装置,也可以是指定目标位置(着陆位置)后自主飞行的装置。
飞行器100是能够沿垂直方向起飞着陆的多轴飞行器。如图1所示,飞行器100具有多个螺旋桨2、及使螺旋桨2分别旋转的多个马达3(参照图2)。飞行器100具有6个螺旋桨2,但螺旋桨2的数量并不限定于6个,例如可以是3~5个,也可以是7个以上。另外,飞行器100中,马达3配置在螺旋桨2中心的正下方,但马达3的位置也可以不在螺旋桨2的正下方。飞行器100在其中心部具有装置主体20。螺旋桨2及马达3在以装置主体20为中心的圆周方向上等间隔地配置。
飞行器100具有1个或多个电池9。图1中,飞行器100具有2个电池9。也可以与飞行器100不同,电池9的数量可以是1个,也可以是3个以上。马达3利用从电池9供给的电力进行驱动。电池9配置在飞行器100的中心部。电池9由配置在飞行器100的中心部的支撑框架30支撑。
如图1所示,飞行器100具有多个从装置主体20沿水平方向延伸的支撑臂7。各支撑臂7在远离装置主体20的位置支撑马达3。各支撑臂7也可以具有从马达3的位置进一步延伸的延长部7a。并且,延长部7a也可以在其端部支撑将多个螺旋桨2整体包围的防护索8。
[装置主体]
如图3所示,装置主体20具有控制装置21、马达驱动装置22、无线装置23、及传感器组24。装置主体20具有收容这些控制装置21及无线装置23等的壳体20a(参照图2)。另外,装置主体20也可以除了包含用来驱动马达3的电池9以外,还包含储存对控制装置21供给的电力的电池。
传感器组24例如包含三轴陀螺仪传感器、三轴加速度传感器等。三轴陀螺仪传感器例如输出与飞行器100的俯仰角、翻滚角、偏航角相应的信号。三轴加速度传感器输出与飞行器100在前后方向上的加速度、左右方向上的加速度及上下方向上的加速度相应的信号。传感器组24所具有的传感器的种类并不限定于此。例如,传感器组24也可以还具有地磁传感器,所述地磁传感器输出与飞行器100的方向相应的信号。
无线装置23是负责信号发送或信号接收中的至少一种的装置。本说明书中,无线装置23分别代表接收机与发送机。无线装置23例如包含GPS(Global Positioning System,全球定位系统)接收机。另外,无线装置23例如包含发送信标的信标发送机,信标是包含自身的位置信息的信号。另外,无线装置23也可以包含接收来自外部的操作输入装置(未图示)的指令的接收机、向外部的操作输入装置发送飞行器100的状态的发送机。外部的操作输入装置例如是供飞行器100的使用者(监控飞行的操作员)操作的个人计算机或专用输入装置。无线装置23向控制装置21输出所接收的信号的内容,或发送从控制装置21获取的信号。飞行器100也可以具有连接无线装置23的天线23a。天线23a例如安装在装置主体20的上部(参照图2)。
马达驱动装置22从电池9接受电力,并对马达3供给与从控制装置21接收的指令值相应的电力。马达3根据从马达驱动装置22供给的电力(电压),以相应的速度旋转。此外,飞行器100针对多个马达3分别具有马达驱动装置22。图3中,示出2个马达驱动装置22作为示例。
控制装置21包含存储装置及执行存储装置中存储的程序的微处理器。控制装置21基于从传感器组24输入的信号(信息)及从无线装置23输入的信号(信息)控制马达3。控制装置21基于从传感器组24输入的信号,分别控制多个马达3的旋转速度,由此控制飞行器100的姿势(俯仰角、翻滚角、偏航角)及移动(前进、后退、上升、下降、向左移动、向右移动)。另外,控制装置21也可以判断飞行器100是否已着水或着陆。并且,当判断出飞行器100已着水或着陆时,控制装置21也可以通过无线装置23发送这一情况。
[支撑框架]
如图2所示,飞行器100具有支撑框架30。支撑框架30例如具有支撑装置主体20及电池9之框架上部30U、及从框架上部30U向下方延伸的框架下部30L。框架上部30U具有在左右方向上分离且在水平方向上延伸的2根水平杆31(图1)。在2根水平杆31之间架设着多根交叉杆,在这多根杆上安装着装置主体20及电池9。
如图2所示,框架下部30L具有从水平杆31向下方延伸的多个脚部32。框架下部30L例如具有4根脚部32(参照图1)。框架下部30L具有多根下端杆33,这多根下端杆33在水平方向上延伸且连接于多个脚部32的下端。框架下部30L的下端(即下端杆33)位于比下述货物容器40的下端靠下方,在飞行器100着陆时于地面上支撑飞行器100,并且防止货物容器40与地面接触。
支撑框架30的构造并不限定于飞行器100的示例。例如,支撑框架30也可以具有供安装电池9及装置主体20的板状支撑台,脚部32从该支撑台向下方延伸。
[货物容器]
飞行器100具有用来收容货物G的货物容器40(参照图2)。货物容器40例如为长方体,如图4所示,具有底壁部41、前壁部40a、后壁部40b、右侧壁部40c、左侧壁部、及上壁部40e。如图4所示,例如底壁部41包含能够打开及关闭的门41a、41b。根据该构造,当飞行器100着陆时,通过将门41a、41b向下侧打开,能使货物G掉落。理想的是在货物容器40的门41a、41b向下侧打开的状态下,支撑框架30的下端(详细来说是下端杆33)位于比门41a、41b的下端靠下方。
飞行器100也可以具有使门41a、41b打开及关闭的致动器。并且,控制装置21可在飞行器100着陆时,驱动致动器来将门41a、41b打开。门41a、41b的位置并不限定于底壁部41。例如,门41a、41b也可以设置在前壁部40a、侧壁部40c、后壁部40b。
货物容器40安装在支撑框架30。例如,货物容器40安装在框架上部30U的下侧。并且,货物容器40位于多个脚部32的内侧。装置主体20位于货物容器40的上侧。
货物容器40液密性地构成。即,货物容器40构成为外部的水分不会渗入到货物容器40的内部。理想的是在门41a、41b关闭的状态下,货物容器40整体液密性地构成。例如,利用树脂一体成形前壁部40a、后壁部40b、右侧壁部40c、左侧壁部及上壁部40e。作为另一例,在前壁部40a、后壁部40b、右侧壁部40c、左侧壁部40d、及上壁部40e是金属、树脂、碳等板材的情况下,将相邻的两片壁部相互连接以使水分不渗入。另外,在两扇门41a、41b的边缘设置着衬垫(密封部件)以防止水分从两扇门41a、41b间的间隙渗入。进而,在门41a、41b的边缘与其周围的壁部40a、40b、40c的边缘也设置着衬垫(密封部件)来防止水分从这些边缘的间隙渗入。
通过使货物容器40液密,如下所述,当飞行器100着水时可获得货物容器40的浮力。此外,货物容器40的底壁部41并非必须要密封。在该情况下,如果货物容器40以水平姿势着水,因货物容器40内部的空气留在货物容器40内部,所以能够抑制水渗入到货物容器40内。结果为,能够获得货物容器40的浮力。
[浮舟]
飞行器100具有浮舟11,浮舟11用来在飞行器100着水时产生浮力。浮舟11例如为树脂发泡体、填充有气体的袋或箱。作为树脂发泡体,有发泡聚苯乙烯、聚氯乙烯泡沫(PVC泡沫)等。
飞行器100具有相互分离配置的多个浮舟11。如图1所示,飞行器100具有4个浮舟11。以俯视飞行器100时包围装置主体20的方式配置4个浮舟11。此外,浮舟11的数量也可以是1个。在该情况下,浮舟11可形成为俯视飞行器100时包围装置主体20的环状。另外,浮舟11的数量也可以是5个以上。
理想的是各浮舟11为薄型。即,如图4所示,理想的是浮舟11在上下方向上的尺寸Fw1小于在前后方向上的尺寸Fw2及左右方向上的尺寸Fw3(参照图1)。由此,可减小因浮舟11所产生的飞行时的空气阻力。
浮舟11的形状并不限定于飞行器100的示例。例如,浮舟11也可以是圆柱形状。在另一例中,浮舟11也可以是气囊。即,也可以在控制装置21检测到飞行器100着水时,气体产生装置(充气机)点火,作为浮舟11的袋利用气体产生装置所产生的气体而膨胀。
[浮舟的浮力及货物容器的浮力]
如上所述,货物容器40液密性地构成。因此,货物容器40在水上及水中产生浮力。当将飞行器100置于水上时,因浮舟11的浮力及与货物容器40的容积相应的浮力,水面H1(参照图2)不会达到内置于装置主体20中的无线装置23的高度。换言之,以使水面H1不达到无线装置23的高度的方式设定浮舟11的尺寸、数量、货物容器40的容积、飞行器100的重量。理想的是以使水面H1不达到装置主体20的高度的方式设定浮舟11的尺寸、数量、货物容器40的容积、飞行器100的重量。此外,本说明中的“将飞行器100置于水上时”意为“将货物容器40中未搭载货物的状态的飞行器100置于没有波浪的淡水中时”。
由此,即使在飞行器100掉落至水面的情况下,无线装置23也能工作,所以能够降低使用者丢失飞行器100的风险。例如,通过构成无线装置23的GPS接收机接收GPS信号,基于该GPS信号能算出飞行器100的位置。然后,能够利用构成无线装置23的信标发送机发送包含该位置信息的信标。使用者(监控飞行器100的飞行的操作员)能够根据该信标特定出飞行器100的位置从而回收飞行器100。
另外,不仅利用浮舟11的浮力,还利用货物容器40的浮力,因此能够实现浮舟11的小型化。结果为,能够减小因浮舟11所产生的飞行时的空气阻力。
理想的是将飞行器100置于水上时,因浮舟11的浮力及与货物容器40的容积相应的浮力,水面H1不会达到装置主体20的壳体20a的下表面20b(参照图2)的高度。这样一来,进一步确保使用者能够回收飞行器100。此外,也可以对装置主体20的壳体20a或壳体20a内的电零件赋予防水功能。
构成装置主体20的零件并非必须收容在共用的壳体20a中。例如收容马达驱动装置22的壳体与收容控制装置21及无线装置23的壳体也可以分开。另外,收容控制装置21的壳体与收容无线装置23的壳体也可以分开。在该情况下,理想的是水面H1不会达到收容电零件的壳体的下表面,所述电零件是使用者回收飞行器100所必需的电零件,即特定飞行器100的位置所必需的电零件。例如,理想的是水面不会达到收容无线装置23的壳体、或收容无线装置23及控制装置21的壳体。
也可以是当将飞行器100置于水上时,因多个浮舟11的浮力及与货物容器40的容积相应的浮力,水面H1不会达到装置主体20、马达3及电池9中任一零件的高度。换言之,以使水面H1不达到装置主体20、马达3及电池9中任一零件的高度的方式设定浮舟11的尺寸、数量、货物容器40的容积、飞行器100的重量。这样一来,使用者从水上回收飞行器100后能够再次使用飞行器100。
也可以规定货物容器40的最大承载重量。在该情况下,也可以是在货物容器40中收容着最大承载重量的货物的状态下将飞行器100置于淡水时,因多个浮舟11的浮力及与货物容器40的容积相应的浮力,水面H1不会达到无线装置23的高度。这样一来,能够进一步确保飞行器100的回收。更理想的是在货物容器40中收容着最大承载重量的货物的状态下将飞行器100置于淡水时,因多个浮舟11的浮力及与货物容器40的容积相应的浮力,水面H1不会达到装置主体20的高度。
也可以是在浮舟11的浮力发挥作用但与货物容器40的容积相应的浮力不发挥作用的状态下将飞行器100置于水上时,水面H1达到电池9、马达3及装置主体20中的至少一个零件的高度。换言之,可以利用尺寸较小的浮舟11,或限制浮舟11的数量来允许水面H1达到该至少一个零件的高度。这样一来,能够减小因浮舟11所产生的飞行中的空气阻力。此外,本说明中的“与货物容器40的容积相应的浮力不发挥作用的状态”是指例如因门41a、41b打开而水渗入到货物容器40内部的状态。
如图2所示,飞行器100中,电池9、马达3及装置主体20之中,电池9的位置最低。因此,在与货物容器40的容积相应的浮力不发挥作用的状态下将飞行器100置于水上时,例如水面H1达到电池9的高度。马达3相对于装置主体20位于水平方向,装置主体20的下表面(壳体20a的下表面20b)的位置低于马达3的下端。也可以是在与货物容器40的容积相应的浮力不发挥作用的状态下将飞行器100置于水上时,水面H1达到装置主体20的下表面(壳体20a的下表面20b)的高度。此外,电池9、马达3及装置主体20的高度关系并不限定于飞行器100的示例。例如,装置主体20的位置也可以高于马达3。
[浮舟的位置]
图5是表示飞行器100受海上波浪影响而倾斜的情况的示意图,省略了天线23a。相对于沿铅直方向的直线V1,飞行器100倾斜了角度θ。另外,在该图中,点P1是飞行器100的重心,点P2是通过多个浮舟11的中心的平面H2与飞行器100的中心线C1的交点。
当飞行器100受波浪影响而倾斜时,如果满足以下的关系式(1),那么飞行器100便能够恢复水平姿势。
X×Mg×tanθ<Y×F…(1)
关系式(1)中各字母的含义如下。
X:重心P1至交点P2的距离
M:无人飞行器的重量
g:重力加速度
θ:飞行器100相对于铅直方向的倾斜度
Y:交点P2至浮舟11的距离
F:浮舟11的浮力
也就是说,如果由浮舟11的浮力F所产生的力矩大于由飞行器100的重量M所产生的力矩,飞行器100就不会翻倒,能够恢复水平姿势。要使关系式(1)成立,理想的是重心P1至交点P2的距离X较小,交点P2至浮舟11的距离Y较大。即,理想的是浮舟11的高度接近重心P1的高度,且水平方向上中心线C1至浮舟11的距离Y较大。
[浮舟在上下方向上的位置]
浮舟11的位置低于装置主体20的高度。图2所示的示例中,浮舟11整体低于货物容器40的底面(底壁部41)。也可以与图2的示例不同,使浮舟11的一部分的位置高于货物容器40的底面(底壁部41)。例如,如图6所示,也可以使包含货物容器40的底面的水平面H3与浮舟11交叉的方式决定浮舟11的位置。换言之,也可以使浮舟11上部的位置高于水平面H3,但使浮舟11下部的位置低于水平面H3。通过这样配置浮舟11,例如与图2的示例相比,浮舟11的位置更加接近重心P1的高度。结果为,能够提升着水后的飞行器100的姿势稳定性。
如图2及图6所示,浮舟11例如安装在支撑框架30。这些图的示例中,浮舟11安装在下端杆33,位于支撑框架30的下端。通过这样配置浮舟11,当飞行器100着陆时,浮舟11触碰地面。结果为,浮舟11能够作为缓冲飞行器100与地面的碰撞的缓冲材发挥功能。在像这样将浮舟11兼用作缓冲材的情况下,为了保证浮舟11的强度可承受与地面的碰撞,浮舟11的素材优选树脂发泡体。
浮舟11的位置并不限定于图2及图6的示例。例如,在图7所示的飞行器100A中,浮舟11整体高于货物容器40的底壁部41的高度(水平面H3)。多个浮舟11相对于货物容器40位于水平方向。通过这样配置浮舟11,浮舟11的高度更加接近飞行器100的重心P1的高度。结果为,能够进一步提升飞行器100的姿势稳定性。作为另一例,浮舟11也可以与水平面H4(参照图7)交叉,水平面H4是通过装置主体20的上端与货物容器40的下端(底壁部41)的中间位置的面。作为另一例,浮舟11也可以与通过飞行器100的重心P1的水平面H5(参照图7)交叉。
图7所示的飞行器100A中,浮舟11安装在比支撑框架30的下端(下端杆33)高的位置。例如,浮舟11安装在支撑框架30的脚部32的中途部。另一方面,支撑框架30的下端(下端杆33)可以位于比包含货物容器40的底面(底壁部41)的水平面H3靠下方。由此,容易使浮舟11的位置接近飞行器100A的重心P1的高度。另外,能够保证飞行器100A着陆时地面与货物容器40之间有足够的距离。
[浮舟在水平方向上的位置]
如图1所示,俯视飞行器100时,浮舟11在水平方向上与装置主体20分离。即,俯视飞行器100时,浮舟11不具有与装置主体20重叠的部分。另外,俯视下飞行器100的中心线C1至浮舟11的中心的距离L1小于俯视下飞行器100的中心线C1至螺旋桨2的中心的距离L2。通过这样配置浮舟11,能够防止浮舟11对通过螺旋桨2的旋转所形成的空气流造成影响。
图1所示的示例中,俯视飞行器100时,浮舟11与旋转的螺旋桨2的轨迹部分重叠。也可以与图1所示的示例不同,俯视飞行器100时,浮舟11不与旋转的螺旋桨2的轨迹重叠。
另一例中,浮舟11也可以位于螺旋桨2的旋转中心及马达3的正下方。也就是说,俯视飞行器100时,浮舟11与马达3可以重叠。在该情况下,理想的是浮舟11的形状不会妨碍通过螺旋桨2的驱动所形成的空气流。例如,理想的是浮舟11是上下方向上细长的形状。另外,浮舟11的直径也可以朝向下方逐渐变小。作为另一例,俯视下飞行器100的中心线C1至浮舟11的距离L1(参照图1)也可以大于中心线C1至马达3的中心的距离L2。在该情况下,浮舟11也可以与支撑框架30安装在不同的部件。
多个浮舟11绕着沿上下方向的中心线C1配置。例如以相邻的2个浮舟11的距离相同的方式配置多个浮舟11。图1中,对多个浮舟11一起标注符号11A、11B、11C、11D。如该图所示,浮舟11A与浮舟11B的距离可以和浮舟11A与浮舟11D的距离、浮舟11C与浮舟11D的距离相同。
与此相对,也可以考虑货物容器40的形状来决定浮舟11的位置。例如,图8所示的飞行器100B中,货物容器40在前后方向上的尺寸W1大于在左右方向上的尺寸W2。在该情况下,当飞行器100着水时,在沿左右方向的中心线C2周围由货物容器40的浮力所产生的力矩大于在沿前后方向的中心线C3周围由货物容器40的浮力所产生的力矩。因此,沿前后方向的中心线C3至浮舟11的距离L5也可以大于沿左右方向的中心线C2至浮舟11的距离L6。
[降落伞]
如图9所示,飞行器100C也可以还具有能够展开的降落伞14。如果利用降落伞14,例如能够缓冲飞行器100碰撞到地面或水面时的冲击。另外,能够使飞行器100掉落时的姿势接近水平。结果为,例如即使在货物容器40的底壁部41与其周围的板材(前壁部40a、后壁部40b、右侧壁部40c、左侧壁部)之间未经密封的情况下,货物容器40内部的空气也会留在货物容器40内部,所以能够使货物容器40作为浮舟发挥功能。例如,在货物配送结束,飞行器100C返航时,如果货物容器40敞开,那么底壁部41与其周围的板材之间就不再密封。在这种情况下,通过利用降落伞14,也能使飞行器100以水平姿势着陆或着水。
[总结]
如以上说明,飞行器100、100A、100B、100C具有:多个螺旋桨2;多个马达3,分别驱动多个螺旋桨2;装置主体20,包含控制多个马达3的控制装置21、及进行信号发送与信号接收中的至少一种的无线装置23;货物容器40,用来收容货物;及浮舟11。当将飞行器100置于水上时,因浮舟11的浮力及与货物容器40的容积相应的浮力,水面至少不会达到无线装置23的高度。根据该构造,不仅利用浮舟11的浮力,还利用货物容器40的浮力,所以能够实现浮舟11的小型化。结果为,能够减小因浮舟11所产生的飞行中的空气阻力。另外,即使在飞行器100、100A、100B、100C掉落至水面的情况下,无线装置23也能工作,因此能够降低使用者丢失飞行器的风险。
此外,本发明提出的飞行器并不限定于上述飞行器100、100A、100B、100C的示例,可以适当变更。例如,可以适当变更货物容器40的形状、尺寸、螺旋桨2的数量及浮舟11的形状、数量。
[符号说明]
2:螺旋桨
3:马达
7:支撑臂
7a:延长部
8:防护索
9:电池
11:浮舟
14:降落伞
20:装置主体
20a:壳体
20b:下表面
21:控制装置
22:马达驱动装置
23:无线装置
23a:天线
24:传感器组
30:支撑框架
30L:框架下部
30U:框架上部
31:水平杆
32:脚部
33:下端杆
40:货物容器
40a:前壁部
40b:后壁部
40c:右侧壁部
40e:上壁部
41:底壁部
41a,41b:门
100,100A,100B,100C:无人飞行器。
- 无人飞行器的遥控器、无人飞行器的航拍控制方法和无人飞行器航拍系统
- 无人飞行器、配送系统、无人飞行器的控制方法以及控制无人飞行器的程序