用于室内环境的紧凑型双旋翼飞行器及控制方法
文献发布时间:2023-06-19 10:03:37
技术领域
本发明属于无人机技术领域,尤其涉及一种用于室内环境的紧凑型双旋翼飞行器及控制方法。
背景技术
由于四旋翼飞行器固有的机械简易性和优良的移动能力,它已经成为大多数任务的首选对象,例如检查工作,室内结构位置导航,探测工作,灾后搜索和救援工作。这些工作往往在传感器上,例如激光雷达和专业相机,它们的重量往往随着它们精度的提升而变得越重。随着大多数四旋翼飞行器增大了它们螺旋桨的尺寸而会增加了额外的质量,其在室内或是狭小空间的操作能力会大大减弱。当有足够的耐久力去完成工作时,在室内使用的飞行器有较高的负载能力的同时也需要有较小的尺寸。许多工作需要承载3D激光雷达几百克的重量,走廊或是人的体宽大小(含有必要的安全间隙)的尺寸和超过十分钟的飞行时间。这三个要求相互冲突并且从根本上限制了四旋翼飞行器的适应性。
例如,DJI Matrice M100可以额外承载0.9千克的载荷,且它的翼展为806毫米,如此在室内操作的话就相对于普遍的门宽要大很多。一个直观的方法或许可以减小飞行器的尺寸从而可以使它通过狭窄的空间,但飞行器需要有承载一定重量载荷的能力,如果减小飞行器的尺寸将会大大减小它的承载能力。举另外一个例子,Crazyflie 2.0,一种迷你四旋翼飞行器,可以穿过极小的间隙。然而,它最大的承载力仅为15克。
先前飞行通过边界区域的问题已经解决了。一种简单的解决方案是利用四旋翼飞行器扁平的几何外形和整机旋转的性能来通过狭窄的通道。另外还需要精确的轨道计算和追踪,这种机动特性不能持续维持(例如,飞行通过狭长的通道),正如飞行器的旋转必定会引起横向飞行。另外,这种方法也会限制在无人机下方的能够安装载荷的空间大小,同时飞行器机身的高度会干扰机动性能。适当的形态是另外一个解决使飞行器能够通过边界区的方案。D.Falanga将飞行器的框架结构转变成了不同的结构以使它便于通过在此之前不能通过的区域。这种方法使飞行器在不损失动力和效率的情况下保持它的尺寸不变。然而,变形的程度和整机尺寸也会因为螺旋桨的使用而受到限制。此外,另外四个伺服马达也使飞行器的力学性能更加复杂,也增加了无人机的重量。为了减小无人机的尺寸,Riviere提出了一种变形机制,也就是将四个旋翼排成一排,将无人机的尺寸缩小成一个旋翼的尺寸。然而,在这种变形方式中不能控制旋转轴。另外一种形态学的应用可以在《四旋翼飞行器被动变形的控制和设计》中找到。然而上述的研究侧向改变了跨越单一飞机的无人机,设计时将飞行器的机翼缩小一个等级,使它的有效尺寸减半。这种结构比前一种结构要更简单,原因是因为变形机制是被动的,不需要额外的伺服发动机。然而,类似于D.Falanga,K.Kleber,S.Mintchev,D.Floreano和D.Scaramuzza所著的《可折叠无人机:一种变形的可以挤压和飞行的四旋翼飞行器》,飞行器在图像成型中本身就不稳定并且也不能始终维持住成型的图像,这是因为其缺少可控性。总的说,这些解决方案的大部分都依赖于一些非传统理论和一些特别的机械技术,这些解决方案在当下的时代不太能进行实际的运用。
发明内容
针对现有技术存在的问题,本发明提出一种用于室内环境的紧凑型双旋翼飞行器及控制方法。
考虑到现有技术中四旋翼飞行器是数据收集任务的首要选择对象,但在承载了较重的传感器时,由于它们庞大的尺寸,在狭窄的室内空间收集数据的能力是十分有限的。因此本发明提出了双旋翼飞行器的设计,以便同时改善它的紧致性和效率。这样的设置允许螺旋桨尺寸保持不变,这也就意味着可以有效的减少无人机在保持相同负载能力的情况下的水平宽度。此外,倾斜,旋转和偏航也可以通过简单的机械方法得到控制,从而提升可靠度和精确度。
本发明具体采用以下技术方案:
一种用于室内环境的紧凑型双旋翼飞行器,其特征在于,包括:对称的旋翼结构以及安装在飞行器中央的飞行控制器;所述旋翼结构包括伺服马达、安装在伺服马达上方的旋翼,两伺服马达在旋转中产生转矩向相同的方向倾斜;偏航装置使两伺服马达向相反的方向倾斜。。以实现各个推力方向并不相同和升力——即推力的集合。
相比较可变形的四旋翼飞行器,这种结构的飞行器的力学结构更简单(结构包括一组最小尺寸的致动器,两个旋翼和两个伺服马达),更小(将飞行器的尺寸缩小到两个螺旋桨的旋转范围内),加强了可控性(整个飞行过程都可控)并且更符合实际(由于飞行时间的延长,故在承载载荷方面更加有效;飞行器系统性的选择了飞行器的零件(例如:螺旋桨,马达)并搭配一个简单有效的控制系统,本发明采用的控制系统由含有精准控制混合的串联PID控制器组成。这种控制系统可以在承载500克载荷下的同时运作超过13分钟的时间;飞行器承受的载荷主要集中于机身底部的激光定位器和记载电脑。
优选地,两旋翼安装在同一高度,两旋翼中心连线与移动方向平行。
优选地,还设置有安装在双旋翼飞行器本体下方的机载电脑和3D激光雷达定位器。
优选地,所述飞行控制器由导航模块、位置控制器、姿态控制器和混合器构成。
优选地,所述旋翼的尺寸为10英寸。
优选地,所述3D激光雷达定位器采用Ouster-16;供电采用5000毫安的Dualsky30C电池;所述伺服马达采用MKS HV1220舵机;所述飞行控制器的硬件部分采用Pixhawk4mini;所述机载电脑采用DJI Manifold。
以及根据以上优选的用于室内环境的紧凑型双旋翼飞行器的控制方法,其特征在于:
对于动力系统:定义惯性坐标系(x
其中m,I和J
控制系统:在位置控制器追踪部分,导航模块生成目标位置p
优选地,所述位置控制器是一个串联的控制器,其放大比率为K
其中,
其中
所述姿态控制器也是一个串联的控制器;其外侧环路是用来达到期望姿态R
其中q
其中
对于混合器,有力矩[τ
其中,D为旋翼铰链到主轴的距离,L为两旋翼间距离的两倍;已给出的期望力矩
与现有技术相比,本发明及其优选方案提供了新的用于室内环境的紧凑型双旋翼飞行器的结构设计,相较于现有的其他无人机飞行器有体积更小更为轻便,更为适合狭小的场景内工作的特点,同时也保持了传统无人机飞行器的稳定性和可操作性。同时,本发明还提出了能够适用于该结构的控制器逻辑和控制方法,以实现新型飞行器的操控。
附图说明
下面结合附图和具体实施方式对本发明进一步详细的说明:
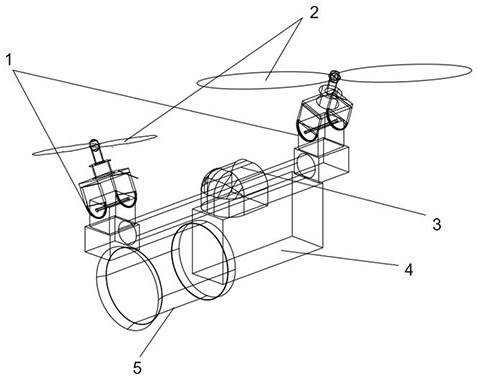
图1为本发明实施例室内双旋翼飞行器的结构示意图;
图2为相同有效尺寸的双旋翼飞行器和四旋翼飞行器的旋翼半径示意图;
图3为不同PWM输入时推进系统的静态推力示意图;
图4为本发明实施例整机力分析示意图1;
图5为本发明实施例整机力分析示意图2;
图6为本发明实施例整机力分析示意图3;
图7为本发明实施例控制器的系统结构示意图;
图中:1-伺服马达;2-旋翼;3-飞行控制器;4-机载电脑;5-3D激光雷达定位器。
具体实施方式
为让本专利的特征和优点能更明显易懂,下文特举实施例,作详细说明如下:
如图1所示,本实施例提供的用于室内环境的紧凑型双旋翼飞行器的主要结构包括:对称的旋翼结构以及安装在飞行器中央的飞行控制器3;旋翼结构包括伺服马达1、安装在伺服马达1上方的旋翼2,以及偏航装置;两伺服马达1在旋转中产生转矩向相同的方向倾斜;偏航装置使两伺服马达1向相反的方向倾斜。以实现各个推力方向并不相同和升力——即推力的集合。还设置有安装在双旋翼飞行器本体下方的机载电脑4和3D激光雷达定位器5。两旋翼2安装在同一高度,两旋翼2中心连线与移动方向平行。
偏航系统一般分为主动偏航系统和被动偏航系统,被动偏航系统指的是依靠风力通过相关机构完成机组风轮对风动作的偏航方式,常见的有尾舵、舵轮和下风向三种;主动偏航指的是采用电力或液压拖动来完成对风动作的偏航方式,常见的有齿轮驱动和滑动两种形式。本实施例采取的是主动偏航系统。本发明的偏航系统既为机载电脑4、3D激光雷达定位器5和飞行控制器3三部分组成;3D激光雷达定位器5通过激光描绘初室内环境的具体障碍模型传输给机载电脑4,再发送信号给飞行控制器3来控制两旋翼2使其转速发生变化,最终达到偏航的效果。
如图7所示,在本实施例中,飞行控制器3由导航模块、位置控制器、姿态控制器和混合器构成。
具体地,3D激光雷达定位器5采用Ouster-16;供电采用5000毫安的Dualsky30C电池;伺服马达1采用MKS HV1220舵机;飞行控制器3的硬件部分采用Pixhawk 4mini;机载电脑4采用DJI Manifold。
以下具体对本实施方案的时机展开介绍:
空气动力学分析:
动量理论提供了一个理想的致动器盘的数学模型。让A在旋翼圆盘区域,圆盘区域可以通过旋翼边缘旋转得到的圆形区域来测量,ρ表示空气的密度,推力T在理想状态下产生桨盘所需的功率P,
在计算由螺旋桨提供升力的飞行器的效率(例如,直升机)时,悬停效率,既HE;和桨盘载荷,既DL,都会被用到。HE和DL定义的公式如下:
这里m表示飞行器的质量。在悬停状态下,螺旋桨的推力等于整个飞行器的重力,带入公式中:
等式(4)表示悬停效率与桨盘载荷的平方根成反比:桨盘载荷越低悬停效率越高。
动量理论可以合理的测算所设计旋翼的数据,且能为之后的效率分析提供一个简单但有效的模型。
基于以上动量理论,将双旋翼飞行器和其他飞行器结构进行了对比。在承载同样载荷并且有同样的有效尺寸的情况下,室内双旋翼飞行器和四旋翼飞行器的功率消耗。在这种情况下,双旋翼飞行器的每个旋翼会产生推力T
T
当双旋翼飞行器沿着轴向方向移动时,整个飞行器的有效尺寸按一个旋翼直径计算(如图2所示)。在相同的有效尺寸下,双旋翼飞行器的旋翼半径为r
r
将公式(5)和(6)带入公式(1)中,可以得出整机的功率等于单个旋翼的功率乘旋翼的数量,已知
这里P
一般来说,可以将这类分析扩展到了其他多旋翼飞行器结构中,包括单旋翼飞行器,三旋翼飞行器,六旋翼飞行器,和八旋翼飞行器,每种飞行器都有一个单个的旋翼并且在每根轴上有两个共轴旋翼。
对于一根轴上只有一个旋翼的飞行器,它消耗的功率是最少的。当考虑到两个共轴旋翼的情况时,共轴双旋翼飞行器的功率消耗甚至比我们所探讨的双旋翼飞行器要更少。然而,这种结构的飞行器实际上不可运用:双共轴旋翼(和关联马达)在没有任何机械干扰的情况下都太厚而无法安装在同一伺服马达上。在共轴的情况中,最优结构是共轴直升机和共轴四旋翼飞行器,这两种飞行器和我们所探讨的双旋翼飞行器一样可以达到相同的效率。然而,由于一个旋翼转动时候会受到另一个的尾流的影响,所以两个共轴旋翼的效率会比两个单个旋翼的效率低,这些结构的动力效率通常比理论计算的要更低一些。另外的,共轴飞行器有它自己的旋翼尾流,而这种尾流很容易受到载荷或是其他的支架结构的影响,并且共轴四旋翼飞行器的马达会在旋翼旋转时会产生能量流失。因此得出结论:在尺寸相同并且承载相同载荷时,双旋翼飞行器是各种通用的飞行器结构中效率最高的一种飞行器配置。最后,六旋翼飞行器和八旋翼飞行器结构在室内都不太适用,不仅因为旋翼数量太多会消耗更多的能量,也由于每个旋翼给整机所增加的重量和尺寸对于飞行器整机都会产生不利影响。市面上还有别的几种非传统的飞行器配置,例如三角四旋翼飞行器,“Stackrotor”平台和飞行机器人。即使是在双旋翼飞行器结构中,也能发现在伺服马达上增加旋翼数量可以提高它的效率。然而,双旋翼飞行器是最小的配置,这种配置简化了机械设计并且提高了在类似与急转弯的狭小空间的操作能力。
系统设计,优化处理和实施:
对于图1提供的本实施例的双旋翼飞行器结构,其结构包括机身框架,旋翼/电动机,伺服马达,激光雷达定位器和机载电脑。其在工作过程中主要需要承载的就是16道室内描绘作用的激光雷达定位器(Ouster-16,重380克)。在尺寸仅有10英寸(25.4厘米)的情况下,飞行器的额定载荷是1.8千克并且在5000毫安的Dualsky电池提供电力的情况下可以飞行超过13分钟。
根据动量理论,旋翼的尺寸越大整机的效率就越高,但由于尺寸的增加会限制飞行器的机动性。为了能使飞行器可以在狭小的拥挤的室内环境中运作,本实施例将飞行器的尺寸(旋翼的尺寸)限制在10英寸以下。
图3展示了本实施例所选马达和旋翼在不同PWM输入时推进系统的静态推力。由于每个旋翼提供了1.25千克的最大推力,悬停效率达到73%,还能留下足够的操作空间,悬停时的功率消耗是2×136=272W。例如型号为DJI snail 5048S的飞行器为双旋翼飞行器,其单个旋翼在提供0.45千克动力时需要消耗142W的功率。总的说,四旋翼飞行器在同样情况下会消耗568W的功率,是双旋翼的两倍。
本实施例选用的4S 5000毫安的电池,Dualsky 30C。考虑到来自其他电子元件的25W的功率消耗,例如机载电脑,预估飞行时间为15分钟。
若室内双旋翼飞行器要求有快速响应,则伺服马达响应的时间必须短。本实施例选用的MKS HV1220的一个响应周期是0.115秒,并且允许有更高的带宽。马达中的钛制变速箱也能预防强烈震动下出现的故障。它也能有效克服由旋翼旋转产生的科氏力矩,最大的转矩可达到23kg*cm。
本实施例还选用Pixhawk 4mini作为飞行控制器硬件,但在具体的实施例过程中,代替了关键的控制器软件包括混合器。同时还采用了一个DJI Manifold机载电脑用来接收来自动作捕捉系统的位置反馈并且将这个位置反馈传输至飞行控制器以提供位置控制。这个机载电脑将来也能在室内自主操作中用来处理激光雷达的数据和相机影像。
基于以上结构和硬件方面的设计,本实施例提供具体的控制设计如下:
动力方面:图4-图6展示了惯性坐标系(x
其中m,I和J
需要注意的是,在上述建模过程中有三种简化方法:(1)由于旋翼的惯性相比整个机身来说太小,所以产生于旋翼角加速的伺服马达的反扭矩不会建立模型。(2)相比较推力产生的转矩,旋翼的转矩τ
对于控制系统:整个室内双旋翼飞行器的控制系统的结构表现在图7中。在位置控制器追踪部分,导航模块会生成目标位置p
室内双旋翼飞行器的位置控制器是一个串联的控制器,其放大比率为K
这里
其中
姿态控制器也是一个串联的控制器。外侧环路(即角环)是用来达到期望姿态R
其中q
其中
混合器:如图4-图6所示,力矩[τ
如图4,图5所示,D为旋翼铰链到主轴的距离,L为两旋翼间距离的两倍;已给出的期望力矩
本专利不局限于上述最佳实施方式,任何人在本专利的启示下都可以得出其它各种形式的用于室内环境的紧凑型双旋翼飞行器及控制方法,凡依本发明申请专利范围所做的均等变化与修饰,皆应属本专利的涵盖范围。
- 用于室内环境的紧凑型双旋翼飞行器及控制方法
- 用于室内环境的紧凑型双旋翼飞行器