一种基于凸优化的火箭软着陆轨迹规划方法
文献发布时间:2023-06-19 10:25:58
技术领域
本发明属于运载火箭控制领域,更具体地说,是涉及一种基于凸优化的火箭软着陆轨迹规划方法。
背景技术
可重复使用运载火箭的垂直回收技术是新一代运载火箭重要发展方向之一。火箭在动力软着陆段根据实际飞行状态,在线规划着陆轨迹是增强偏差适应性,提升着陆精度的有效方式之一。目前的在线轨迹规划方法,在线规划出的最优推力幅值指令通常具有Bang-Bang控制的特点,即发动机先以最小推力工作,然后再切换至最大推力。然而这类理想的着陆轨迹在考虑推力调节过程时,由于推力跨度较大,调节过程延迟对飞行过程具有显著影响,并且火箭在最小推力工作时无法预见后续飞行过程可能存在的干扰,当推力调节至最大值后,火箭后续的飞行状态将处于物理可行域的边界,轻微的扰动也将导致火箭飞行状态超出可行域,从而无法实现安全软着陆。在发动机推力调节能力有限,最小推力仍大于重力的大推重比条件下,火箭动力软着陆段可行域更狭窄,跟踪在线规划的Bang-Bang控制轨迹,仅能够提升火箭对气动减速段环境不确定性偏差的适应性,对火箭动力软着陆段偏差适应能力不足。
发明内容
本发明的目的在于提供一种基于凸优化的火箭软着陆轨迹规划方法,旨在解决火箭进入动力软着陆段后的抗干扰能力较差,火箭动力软着陆段偏差适应能力不足的技术问题。
为实现上述目的,本发明采用的技术方案是:提供一种基于凸优化的火箭软着陆轨迹规划方法,包括以下步骤:
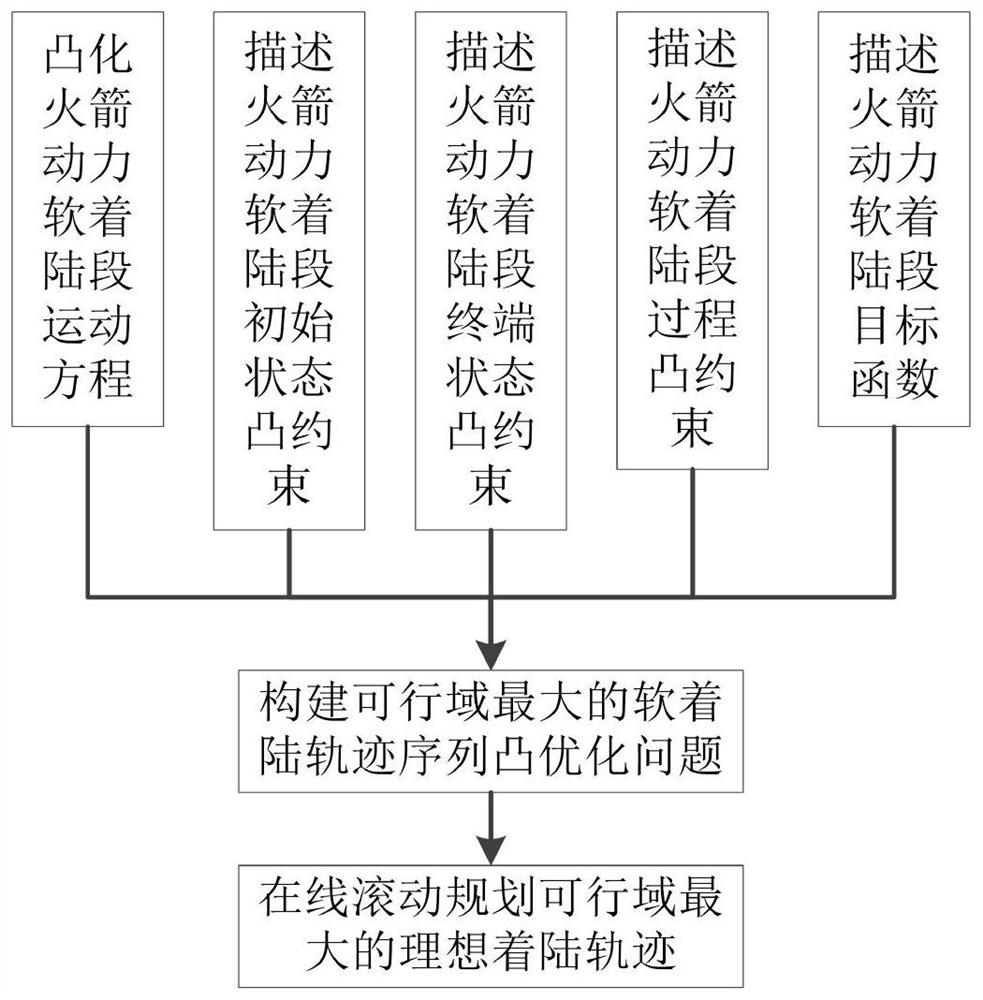
根据火箭软着陆过程建立满足凸优化的火箭动力软着陆段运动方程、火箭动力软着陆段状态约束方程,并获取火箭动力软着陆段目标函数;其中,所述火箭动力软着陆段状态约束方程包括:火箭动力软着陆段初始状态凸约束方程、火箭动力软着陆段终端状态凸约束方程和火箭动力软着陆段过程凸约束方程;
根据所述火箭动力软着陆段运动方程、所述火箭动力软着陆段状态约束方程、以及所述火箭动力软着陆段目标函数建立火箭动力软着陆段在线轨迹序列凸优化方程;
在线滚动规划软着陆段可行域最大的理想轨迹。
优选地,根据火箭软着陆过程建立满足凸优化的火箭动力软着陆段运动方程、火箭动力软着陆段状态约束方程,并获取火箭动力软着陆段目标函数,包括以下步骤:
定义目标坐标系,在该所述目标系下描述火箭软着陆三自由度质心运动;
获取满足凸优化的火箭动力软着陆段运动方程,该火箭动力软着陆段运动方程为:
其中,微分自变量为τ,取值范围[0,1],t
分别获得所述火箭动力软着陆段初始状态凸约束方程、所述火箭动力软着陆段终端状态凸约束方程以及所述火箭动力软着陆段过程凸约束方程;
获得所述火箭动力软着陆段目标函数。
优选地,初始状态凸约束包括:火箭当前的位置、速度和质量的等式约束;或/和终端状态凸约束包括纵向位置和时间等式约束,以及水平面内位置、速度、质量、加速度方向的线性不等式约束;或/和软着陆段过程凸约束包括加速度方向、纵向速度、高度约束、加速度幅值、俯仰角变化率、偏航角变化率的线性不等式约束,以及加速度矢量和加速度变化率的二阶锥约束。
优选地,所述火箭动力软着陆段初始状态凸约束方程为:
[r
其中,r
优选地,所述火箭动力软着陆段终端状态凸约束方程为:
t(1)=t
V
其中,y
优选的,所述加速度矢量和加速度变化率的二阶锥约束,包括:
根据推力矢量二阶等式约束||Γ||=Γ,将所述推力矢量二阶等式约束松弛为推力矢量二阶锥约束得到:
根据加速度等式约束dΓ=Γ
Γ
优选地,获得所述火箭动力软着陆段目标函数,包括:
以燃料最省作为目标函数,引入着陆全程dΓ最小的附加项,保证最优解在二阶锥约束的边界上,与原加速度等式约束等价;所述火箭动力软着陆段目标函数为:
其中,p
优选地,所述火箭动力软着陆段在线轨迹序列凸优化方程为:
[r
V
Γ
其中,火箭推力可调范围T
优选地,在线滚动规划软着陆段可行域最大的理想轨迹,包括:
利用原始对偶内点算法在线滚动规划软着陆段可行域最大的理想轨迹;当相邻两次解得的优化变量序列之间的偏差满足收敛精度要求时,得到最优着陆轨迹和包括加速度幅值和方向在内的控制指令序列,利用T=Γe
优选地,定义目标坐标系,包括:
以着陆点为原点O,OX轴在目标点当地水平面内指向发射点,OY轴垂直目标点当地水平面指向天,OZ轴满足右手定则。
该种基于凸优化的火箭软着陆可行域最大的轨迹规划方法利用变量代换的方法将终端时间自由的垂直着陆轨迹规划问题转换为自变量终端固定的优化问题,同时降低了运动方程的非线性程度。然后利用松弛方法,将二阶等式约束转化为二阶锥约束,并通过增广目标函数的形式保证最优解满足原约束。再者利用序列线性化的思想,将其余非凸约束转化为线性约束,从而构建了着陆段可行域最大的凸优化命题。最后利用原始对偶内点算法在线滚动规划可行域最大的理想着陆轨迹。
本发明提供的一种基于凸优化的火箭软着陆轨迹规划方法的有益效果在于:与现有技术相比,本发明提供一种基于凸优化的火箭软着陆轨迹规划方法,通过变量转换、约束松弛、序列线性化的方法,构建可行域最大的软着陆轨迹凸优化问题。将非线性非凸规划问题凸化为二阶锥规划问题,提升算法的收敛性和计算效率。使得规划出的飞行轨迹始终处于可行域的中值附近,推力幅值指令尽可能远离推力上下边界,且推力变化率近似为零,从而在物理可行域内尽可能提升火箭对后续飞行过程不确定性的适应能力。
附图说明
为了更清楚地说明本发明实施例中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
图1为本发明实施例提供的一种基于凸优化的火箭软着陆轨迹规划方法的结构框图;
图2为本发明实施例提供的一种基于凸优化的火箭软着陆轨迹规划方法的流程示意图一;
图3为本发明实施例提供的一种基于凸优化的火箭软着陆轨迹规划方法的流程示意图二。
具体实施方式
为了使本发明所要解决的技术问题、技术方案及有益效果更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
请一并参阅图1至图3,现对本发明提供的一种基于凸优化的火箭软着陆轨迹规划方法进行说明。所述一种基于凸优化的火箭软着陆轨迹规划方法,包括以下步骤:
S1、根据火箭软着陆过程建立满足凸优化的火箭动力软着陆段运动方程、火箭动力软着陆段状态约束方程,并获取火箭动力软着陆段目标函数;其中,所述火箭动力软着陆段状态约束方程包括:火箭动力软着陆段初始状态凸约束方程、火箭动力软着陆段终端状态凸约束方程和火箭动力软着陆段过程凸约束方程。
本步骤的具体实现可以为:
S1.1、定义目标坐标系,并在该目标系下描述火箭软着陆三自由度质心运动;
软着陆特指航天器经专门减速装置减速后,以一定的速度安全着陆的着陆方式。
以着陆点为原点O,OX轴在目标点当地水平面内指向发射点,OY轴垂直目标点当地水平面指向天,OZ轴满足右手定则。
S1.2、获取满足凸优化的火箭动力软着陆段运动方程,该火箭动力软着陆段运动方程考虑推力变化率和程序角速度变化率,该火箭动力软着陆段运动方程为:
运动方程的自变量是时间t,其中,r=[x,y,z]
定义新的状态变量M=ln(m),加速度控制变量Γ=T/m,Γ=T/m和加速度变化率dΓ。将运动方程的自变量由时域[t
其中,微分自变量为τ,取值范围[0,1],t
采用序列线性化的方式处理存在非凸项的运动方程,定义f(X,U)表示运动方程右边函数,利用一阶泰勒展开公式对其进行线性化,得到满足凸约束条件的运动方程等式约束,
其中X
S1.3、分别获得所述火箭动力软着陆段初始状态凸约束方程、所述火箭动力软着陆段终端状态凸约束方程以及所述火箭动力软着陆段过程凸约束方程;
本步骤的具体实现可以为:
描述火箭动力软着陆段初始状态凸约束
在τ=0处,初始状态约束包括火箭当前的位置、速度和质量的等式约束,火箭动力软着陆段初始状态凸约束方程为:
[r
其中,下标0代表初始点的状态量,具体的解释为:r
描述火箭动力软着陆段终端状态凸约束
在τ=1处,终端状态约束包括纵向位置和时间等式约束,以及水平面内位置、速度、质量、加速度方向的线性不等式约束,M
t(1)=t
V
其中,下标f代表期望的终端状态量,具体的解释为:t
描述火箭动力软着陆段过程凸约束
过程约束包括加速度方向、纵向速度、高度、加速度幅值、俯仰角变化率、偏航角变化率、线性不等式约束,以及加速度矢量和加速度变化率的二阶锥约束。过程约束方程具体形式如下:
(a)加速度方向、纵向速度、高度约束
y(τ)≥0,V
其中高度和速度不等式约束表示着陆过程中高度不能低于目标点,且纵向速度始终向下,
(b)加速度幅值约束
根据火箭推力可调范围T
T
利用一阶泰勒展开公式对其进行线性化处理,可转化为如下线性不等式约束,
(c)俯仰角变化率、偏航角变化率约束
将俯仰角速度和偏航角速度不等式约束,近似转化为水平方向加速度变化率的线性不等式约束,如下所示,
其中,i表示第i个离散点上的控制量,
(d)加速度矢量和加速度变化率约束
对于推力矢量二阶等式约束||Γ||=Γ,将其松弛为如下二阶锥约束,
为通过加速度变化率控制着陆过程中推力变化率基本为零,引入如下加速度等式约束,
dΓ=Γ
将上式松弛为如下二阶锥约束,
Γ
S1.4、获得火箭动力软着陆段目标函数。
以燃料最省作为目标函数,同时引入着陆全程dΓ最小的附加项,保证最优解在二阶锥约束的边界上,与原加速度等式约束等价。火箭动力软着陆段目标函数为:
其中p
S2、根据火箭动力软着陆段运动方程、火箭动力软着陆段状态约束方程、以及火箭动力软着陆段目标函数建立火箭动力软着陆段在线轨迹序列凸优化方程。
跟据步骤S1.2中描述的运动方程、步骤S1.3中描述的约束条件,以及S1.4描述的目标函数,构建可行域最大的动力软着陆段轨迹序列凸优化命题,如下
[r
V
Γ
y
S3、在线滚动规划软着陆段可行域最大的理想轨迹。
利用原始对偶内点法在线滚动优化软着陆段可行域最大的理想轨迹。
对于步骤S2中的描述的采用序列线性化处理的凸优化问题,根据火箭当前状态(速度、位置、质量),利用基于原始对偶内点法的序列凸优化算法求解,当相邻连两次解得的优化变量序列之间的偏差满足收敛精度要求时,可得到最优着陆轨迹和包括加速度幅值和方向在内的控制指令序列,利用T=Γe
本发明提供的一种基于凸优化的火箭软着陆轨迹规划方法,通过描述满足凸优化性质的约束条件和目标函数,构建着陆段可行域最大的凸优化命题,使得最优着陆轨迹尽可能远离可行域边界。
本发明提供的一种基于凸优化的火箭软着陆轨迹规划方法,与现有技术相比,通过变量转换、约束松弛、序列线性化的方法,构建可行域最大的软着陆段轨迹凸优化问题,并通过求解可行域最大的软着陆段轨迹凸优化问题,实时规划出火箭的最优着陆轨迹,作为制导跟踪的标准轨迹,提升了火箭动力软着陆段的偏差适应能力。将软着陆段推力变化率为零的等式约束转换为加速度变化率的二阶锥约束,并结合目标函数的设计,保证最优解的推力幅值近似不变,适合原始对偶内点法在线求解,提升了在线规划着陆轨迹的计算效率。提升可重复使用火箭进入动力软着陆段后的抗干扰能力,并且适于在线求解复杂约束的轨迹规划问题。
以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
- 一种基于凸优化的火箭软着陆轨迹规划方法
- 一种基于Bezier-凸优化的运载火箭上升段轨迹规划方法