一种桥梁智能检测飞行机器人
文献发布时间:2023-06-19 10:33:45
技术领域
本发明涉及一种桥梁检测装置,尤其指一种桥梁智能检测飞行机器人。
背景技术
国铁集团业务主管部门负责既有线路铁路运营安全,由各铁路运输管理局的桥检队负责所管辖区的桥梁质量检测,及时发现并解决桥梁各种病害,以保证铁路运营安全。目前主要通过以下三种方式进行桥梁质量检测监控:
a) 梁下拼搭脚手架:优点:检测人员行走方便;缺点:工程量大;
b) 悬索挂篮:优点:可水平移动也可竖直移动;缺点:移动检测不便,危险性高;
c) “蜘蛛人”:优点:方法简单;缺点:无法水平移动检测。
目前现有桥检队均采用人工检测方法,存在着检测效率低下,任务繁重而工程量大,传统落后的检测方法已经不能满足当前铁路建设飞速发展带来的桥梁检测任务剧增的需求,尤其是无法实现大数据统计分析等致命问题。
智能、高效的既有梁检测技术是保障桥梁运营安全的根本措施,若无新技术手段及时发现病害并将其修复,将引发质量、运营安全事故。
发明内容
本发明所要解决的技术问题即针对上述缺失,提出了目前全国急需的桥梁检测装置,为既有运营桥梁病害、寿命评估等质量安全提供了技术保障。
本发明是通过以下技术方案实现的:
桥梁智能检测飞行机器人包括转场车、计算站、牵索电缆、飞行器、爬壁机器人和裂缝自动监测仪,所述转场车上安有计算站,转场车与飞行器、爬壁机器人用牵索电缆连接,并为其供电,飞行器上安装爬壁机器人,爬壁机器人手臂上安装裂缝自动监测仪,飞行器按测量并限制的最大飞行高度,导航飞到欲检测位置,当爬壁机器人吸附在待测位置后,飞行器按传感器指令与爬壁机器人脱离,爬壁机器人按设定路线进行检测,并随时将检测的图像、数据采用5G技术发送给计算站,检测完毕后飞行器将爬壁机器人接回地面。
所述转场车,具有越野能力,可适用于各种桥下路面;利用所述转场车配备大功率发动机进行发电,为整套设备提供持续电源。
所述计算站具备软件程序,自动控制所有检测装备的程序,有数据输入、分析、甄别、输出等计算能力,并具有数据图像的远程监控和信号收发通讯功能,自动打印检测报告。
所述牵索电缆用于限制所述飞行器的最大飞行高度并为所述飞行器、爬壁机器人提供动力电源。
所述飞行器为高负载飞行器,将所述爬壁机器人、所述裂缝自动检测仪等桥梁检测仪器送到工作位置或从工作位置接回。
所述爬壁机器人上安有桥梁检测仪器。
所述爬壁机器人上安有信号收发仪器,负责发送检测信息、接收计算站传递的工作指令。
所述爬壁机器人吸附在被检测的运营梁表面,并按程序指令行走。
所述裂缝自动监测仪带有高倍、普通两种镜头同时拍摄,高倍镜头拍摄裂缝等细小病害,普通镜头负责拍摄破损等明显病害。
所述的飞行器与所述爬壁机器人自动脱离后,所述飞行器在所述爬壁机器人侧下方空中悬停,以防止所述爬壁机器人意外跌落损毁。
下面结合附图进行下一步说明。
附图说明
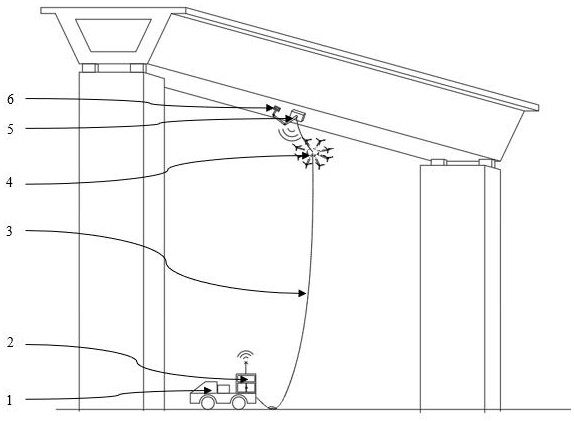
图1是本发明所述桥梁智能检测飞行机器人整套装置工作图。
图2是本发明所述飞行器承载所述爬壁机器人飞行图。
图3是本发明所述爬壁机器人工作图。
其中:1. 转场车;2. 计算站;3. 牵索电缆;4. 飞行器;5. 爬壁机器人;6. 裂缝自动监测仪。
具体实施方式
如图1、图2、图3所示,本实施例所述的一种桥梁智能检测飞行机器人,包括转场车1、计算站2、牵索电缆3、飞行器4、爬壁机器人5、裂缝自动监测仪6。所述转场车1承载计算站2,由牵索电缆3与飞行器4、爬壁机器人5连接,飞行器4上离合式承托爬壁机器人5,爬壁机器人5的手臂上安装裂缝自动监测仪6,牵索电缆3兼做飞行器4及爬壁机器人5的工作电缆,电源由转场车1上安装的发电机提供,采用远红外测距仪来确定飞行器4的最大飞行高度,并由牵索电缆3限制飞行高度,飞行器4按北斗导航飞到指定的检测位置,当爬壁机器人5吸附在待测梁体底板后,由重力传感器发布指令,飞行器4与爬壁机器人5自动脱离,爬壁机器人5在梁底板上按程序规定的路线进行裂缝等病害检测,并随时将检测的图像、数据采用5G技术发射给计算站2,检测完毕后飞行器4升高,与爬壁机器人5自动连接并共同返回地面。
本实施例所述转场车1是运输装备,采用改进后的沙地摩托车,具有越野能力,可适用于桥下各种路面环境,负责“桥梁智能检测用飞行机器人”的工作往返及检测转场;利用所述转场车1配备的大功率发动机带动柴油发电机发电,为整套装置提供持续电源。
本实施例所述计算站2是控制装置,主要由控制柜组成。控制柜安装于转场车2之上,由计算机站、图像显示屏组成。
计算机站装有软件程序,自动控制所有检测装备的程序,包括计算中心、自控程序、计算分析、病害甄别等程序软件,具有数据输入、分析、甄别、输出、数据图像的远程监控和信号收发通讯及自动打印检测报告功能;
图像显示屏具有开机自检结果显示、仪器自身故障报警功能,工作时检测步骤语音播报、即时显现检测的数据图像、数理统计分析图、发现病害即时音光报警。
本实施例所述计算站2收到检测仪传回的图像数据后,实时上传国铁集团的工程管理平台及业务主管部门,同时进行计算分析,生成检测报告,电子签字确认后上传,并自动打印。
本实施例所述牵索电缆3是保险供电装置,采用钢索电缆,具有足够的抗拉强度,制约飞行器4飞行高度不得超过桥面板高度,是重要的安全保障设施。牵索电缆3的作用是:
1)限高。由于高铁车辆运行的行车限界内严禁任何飞行物入侵,为此以牵索电缆3限制飞行器4的飞行距离和高度,严禁飞行超过桥面板高度;2)供电。由于常用飞行器4的续航时间较短,所以牵索电缆3选用钢索电缆,在限制飞行高度的同时,为飞行器4和爬壁机器人5持续供电。
飞行机器人主要由飞行器4和爬壁机器人5组成。
本实施例所述飞行器4是输送装置,是由八螺旋三叶片型承重无人机组成的高负载飞行器,由北斗卫星导航指引飞行路线。飞行器4负责将爬壁机器人5(含裂缝自动监测仪6)从地面送至工作位置或从工作位置接回地面;当飞行器4将爬壁机器人5送达梁底检测部位后,爬壁机器人5的抽真空吸附电机自动启动,吸附在梁底板工作面。当重力传感器发出指令后飞行器4开始下降,与爬壁机器人5自动脱离,以排除飞行振动及行进俯仰运动对裂缝自动检测仪6拍照的干扰。
本实施例所述爬壁机器人5由抽真空系统和行走系统组成,抽真空系统通过电机抽真空和软材裙边密闭形成负压吸附;行走系统由行走电机及变速器带动四个车轮在被检测的梁体表面行走。
本实施例所述爬壁机器人5上安有红外测距传感器、接触式传感器、红外光电传感器、防碰撞传感器、边缘检测传感器、防跌落传感器、防过热传感器、低电量自动报警传感器、光电编码器、电子罗盘和陀螺仪等。
本实施例所述爬壁机器人5在前进力克服吸附摩擦力后,沿梁底板按设计程序及北斗卫星导航路线,纵横爬行、水平移动;爬壁机器人5工作前与飞行器4自动脱离,为解决飞行器4飞行振动对拍摄的影响,以保障裂缝自动监测仪6图像采集清晰度。
本实施例所述爬壁机器人5上安有信号收发仪器,负责发送检测信息、接收计算站2传递的工作指令。
本实施例所述裂缝自动检测仪6是桥梁检测的主要采集设备,负责对梁体病害进行检测。带有高倍、普通两种镜头,可同时拍摄。高倍镜头由千兆网工业面阵CCD(chargecoupled device)相机、工业镜头、机器视觉LED条形光源组成,负责拍摄裂缝等细小病害;普通镜头使用防颤抖、大广角、高像素普通相机,负责拍摄破损等明显病害。
本实施例所述裂缝自动监测仪6采集梁面视频图像,传输给爬壁机器人5,由爬壁机器人5通过5G信号发射模块,将照片(或视频)文件传回梁下的计算站2。
- 一种桥梁智能检测飞行机器人
- 一种滚动式桥梁检测飞行机器人