一种开放式微型光电吊舱
文献发布时间:2023-06-19 10:36:57
技术领域
本发明涉及一种开放式微型光电吊舱,属于飞行器、航空技术中光电设备技术领域。
背景技术
随着科学技术的发展,无人机在军事、民用和科学研究等领域用途的不断扩大,对光电吊舱等有效载荷提出了重量更轻、体积更小、功耗更低、稳定精度更高、作用距离更远等要求;在这些要求中,光电吊舱的重量和体积是关键技术指标。光电吊舱的重量和体积减小,对无人机体积、载重、续航能力的要求更低,对于增加无人机的留空时间,特别是小型无人机,提高完成任务的能力起着关键作用。吊舱的外观,一般根据吊舱的结构进行设计,不考虑气动特性。无人机在安装使用吊舱时,整体的气动布局受吊舱外形影响,不利于无人机进行精确飞行控制,特别是高速飞行无人机。
目前现有技术的光电吊舱,结构复杂。专利申请号为“201220048406.3”,名称为“光电吊舱”的吊舱结构,方位通过变换机构齿轮间接驱动方位框架转动,采用导电滑环实现方位连续旋转。这种结构增加了方位框架的体积及重量,降低了方位的控制精度。专利申请号为“201230577301.2”,名称为“轻量型光电吊舱”的吊舱外观设计,为常规的圆柱形和半球形的结合,该种结构不利于快速飞行无人机整体气动控制。
发明内容
本发明的目的在于,克服现有技术存在的不足,提供一种重量更轻、体积更小、结构更紧凑的光电吊舱。
本发明是通过以下技术方案实现的:
一种开放式微型光电吊舱,包括电路板组件、基座组件、方位组件、俯仰组件。其中俯仰框架内安装成像设备,上下表面分别用于安装电路板,与俯仰电机组件、俯仰电机座一起固定在方位框架内,通过方位电机组件固连在基座上。
进一步方案:
所述基座组件包括安装座、基座、方位电机组件、电路板,其中电路板通过螺丝固定在基座上表面,方位电机轴与安装座固定,通过螺丝固定在基座上。
所述方位组件包括方位框架、从动轮、轴承及外压圈、控制电路板I。
所述方位组件与方位轴固定在一起。通过轴承,基座组件和方位组件固连。
所述俯仰组件包括俯仰框架、俯仰电机组件、俯仰电机座、主动轮、转接轮、控制电路板II、成像设备、右俯仰轴、左俯仰轴、转接件、转接电路板。其中俯仰电机座固定在俯仰框架左侧,通过轴承与方位框架左臂固连。
所述主动轮安装在俯仰电机轴上,与俯仰电机组件、俯仰电机座一起固定在俯仰框架左侧。转接轮通过螺丝以一定倾角固定在限位块上。从动轮通过钢索、经过转接轮与主动轮固连。钢索在从动轮侧安装有预紧弹簧。
所述俯仰框架右侧通过右俯仰轴、轴承及外压圈与方位框架右臂固连。
所述俯仰框架通过固定在俯仰框架左侧俯仰电机座上的俯仰电机组件带动主动轮,利用钢索传动、转接轮转向带动固定在方位框架左臂上的从动轮的方式来完成在俯仰方向上的转动,从而控制成像设备在俯仰方向的运动。
所述成像设备固定在俯仰框架内。
所述电路板组件包括固定在基座上的电源电路板,固定在方位框架上表面的控制电路板I,固定在俯仰电机座上在控制板II,固定在俯仰框架上下表面的图像处理板I和图像处理板II,以及方位框架左臂上的转接电路板。
附图说明
图1:本发明整机组件图。
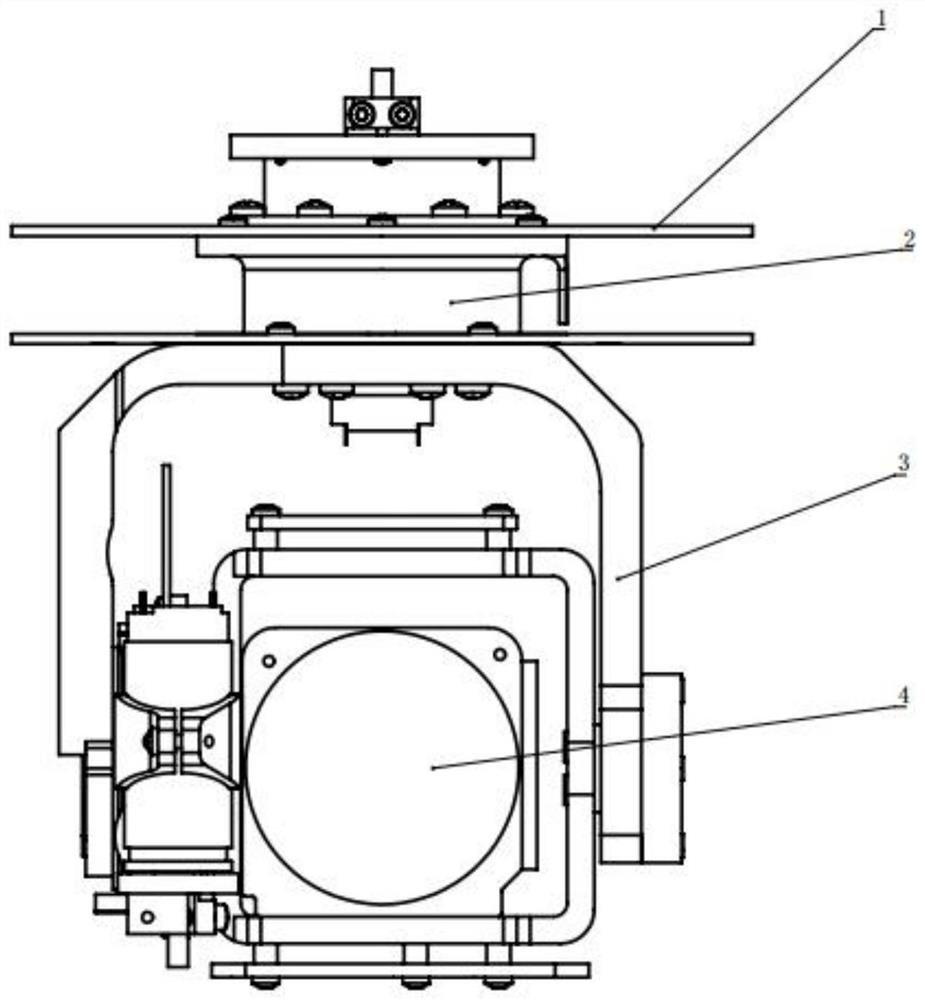
图2:本发明正面结构示意图。
图3:本发明侧面结构示意图。
其中各标记名称为:1-电路板组件,2-基座组件,3-方位组件,4-俯仰组件,11-安装座,12-基座,13-方位电机组件,14-方位框架,15-轴承及外压圈,16-右俯仰轴,17-俯仰框架,18-图像处理板I,19-成像设备,20-控制电路板II,21-图像处理板II,22-控制电路板I,23-电源电路板,30-俯仰电机组件,31-俯仰电机座,32-转接轮,33-主动轮,34-从动轮,35-限位块,36-左俯仰轴,37-转接件,38-转接电路板。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述。
1、一种开放式微型光电吊舱,包括电路板组件(1)、基座组件(2)、方位组件(3)、俯仰组件(4)。其中俯仰框架(17)内安装成像设备(19),上下表面分别用于安装电源电路板(23)、控制电路板I(22),与俯仰电机组件(30)、俯仰电机座(31)一起固定在方位框架(14)内,通过方位电机组件(13)固连在基座(12)上。
2、如附图2所示,基座组件(2)包括安装座(11)、基座(12)、方位电机组件(13)、控制电路板I(22),其中控制电路板(22)通过螺丝固定在基座(12)上表面,方位电机轴与安装座(11)固定,通过螺丝固定在基座(12)上。
所述方位组件(3)包括方位框架(14)、从动轮(34)、轴承及外压圈(15)、控制电路板I(22)。
所述方位组件(3)与方位轴固定在一起。通过轴承,基座组件(2)和方位组件(3)固连。
3、如图2、3所示,所述俯仰组件(4)包括俯仰框架(17)、俯仰电机组件(30)、俯仰电机座(31)、主动轮(33)、转接轮(32)、控制电路板II(20)、成像设备(19)、右俯仰轴(16)、左俯仰轴(36)、转接件(37)、转接电路板(38)。其中俯仰电机座(31)固定在俯仰框架(17)左侧,通过轴承与方位框架(14)左臂固连。
如图3所示,所述主动轮(33)安装在俯仰电机轴上,与俯仰电机组件(30)、俯仰电机座(31)一起固定在俯仰框架(17)左侧。转接轮(32)通过螺丝以一定倾角固定在限位块(35)上。从动轮(34)通过钢索、经过转接轮(32)与主动轮(33)固连。钢索在从动轮(34)侧安装有预紧弹簧。
所述俯仰框架(17)右侧通过右俯仰轴(16)、轴承及外压圈(15)与方位框架(14)右臂固连。
所述俯仰框架(17)通过固定在俯仰框架(17)左侧俯仰电机座(31)上的俯仰电机组件(30)带动主动轮(33),利用钢索传动、转接轮(32)转向带动固定在方位框架(14)左臂上的从动轮(34)的方式来完成在俯仰方向上的转动,从而控制成像设备(19)在俯仰方向的运动。
所述成像设备(19)固定在俯仰框架(17)内。
4、所述电路板组件(1)包括固定在基座(12)上的电源电路板(23),固定在方位框架(14)上表面的控制电路板I(22),固定在俯仰电机座(31)上的控制电路板II(20),固定在俯仰框架(17)上下表面的图像处理板I(18)和图像处理板II(21),以及方位框架(14)左臂上的转接电路板(38)。
在实际运用中,将吊舱本体通过安装座安装孔采用减震器固定在无人机下方,外罩采用无人机整体气动布局设计,通过手动或自动方式控制方位电机组件和俯仰电机组件转动,调节成像设备成像角度。通过吊舱上的图像处理板,实时处理吊舱图像数据。
以上显示和描述了本发明的基本原理和主要特征以及本发明的优点。本发明不受上述实施例的限制,上述实施例和说明书中描述的只是本发明的原理,在不脱离本发明的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。
- 一种开放式微型光电吊舱
- 一种侦查设备及其微型两轴双光光电吊舱