一种侧推动力装置为涵道式的多旋翼载人飞行器
文献发布时间:2023-06-19 10:44:55
技术领域
本发明涉及飞行器技术领域,具体涉及一种侧推动力装置为涵道式的多旋翼载人飞行器。
背景技术
随着家用汽车的普及,城市交通拥堵问题日渐凸显,因此适用于普通民众可以拥有和乘座的家用载人飞行器备受期待。自1903年莱特兄弟发明了第一架飞机以来,经过100多年的发展,全球商用飞机已经高度成熟,而适用于普通民众可以拥有和乘座的家用载人飞行器却发展缓慢。美国国家航空航天局(NASA)提出了自由移动出行(On-DemandMobility,ODM)的战略框架,愿景是“能够让任何人随时随地从一处飞向另一处”,报告指出,自动驾驶垂直升降(Vertical Takeoff andLanding,VTOL)的小型载人飞行器是未来城市交通工具之一。
从飞行原理和飞行器结构来看,可以用于载人的飞行器主要分为:固定翼飞行器、多旋翼飞行器、直升飞机、涵道风扇飞行器及倾转旋翼飞行器等,这些类型的飞行器搭载上自动驾驶飞行控制系统,便可以在一定程度上改造成为自动驾驶飞行器。近年来,国内外以多旋翼载人飞行器为代表的自动驾驶垂直升降小型载人飞行器研究较多,其中比较典型的多旋翼载人飞行器,比如:广州亿航EHang、日本SkyDrive、法国空客CityAirBus和美国LiftAircraft等公司研发的多旋翼载人飞行器。
自动驾驶垂直升降的多旋翼载人飞行器,系统组成技术框架主要包括:机体结构、动力能源、航电系统、地面控制等。机体结构作为飞行器的骨架,包括机身、机架和座椅等。目前国内外研发的这些多旋翼载人飞行器之间最大的区别就在于飞行器的机体结构设计迥异,那么,什么样的机体结构才是未来多旋翼载人飞行器发展的方向呢?本发明所要解决的技术问题就是对一种多旋翼载人飞行器的机体结构提出的适于实用的一种侧推动力装置为涵道式的多旋翼载人飞行器新的技术方案,是多旋翼载人飞行器机体结构创新设计的技术方案,本发明的设计灵感来源于现有无人飞行器和汽车,本发明打破了现有无人飞行器机体结构的机架和机臂的结构限制,在现有无人飞行器的旋翼中间设置一个车厢状立体结构的舱体用于载人或载货,从而可以在未来多旋翼载人和载货飞行器应用领域得到突破和发展。
本发明的机体结构不同于广州亿航EHang、日本SkyDrive、法国空客CityAirBus和美国Lift Aircraft的多旋翼载人飞行器的机体结构,目前国内外研发的多旋翼载人飞行器的机体结构存在以下几个问题:一、现有多旋翼载人飞行器载人舱受机体结构的设计限制,载人舱相对于举升旋翼垂直方向上的位置关系有待优化,二、现有多旋翼载人飞行器载人舱受机体结构的设计限制,载人舱舱体相对较小只能容纳1至2人乘坐,三、现有多旋翼载人飞行器没有设置侧推动力装置,四、现有多旋翼载人飞行器同轴的举升旋翼一般只设置有单组,并且没有设置导流筒罩,五、现有多旋翼载人飞行器一般都采用中央动力输出。
本发明的飞行、起降类同现有无人飞行器,具有机体结构新颖、舱体大而实用、侧推动力强劲、转向操控灵活的优势。
发明内容
针对现有技术中的缺陷,本发明提供一种飞行、起降类同现有无人飞行器的一种侧推动力装置为涵道式的多旋翼载人飞行器,其具有机体结构新颖、舱体大而实用、侧推动力强劲、转向操控灵活的优势。
一种侧推动力装置为涵道式的多旋翼载人飞行器,包括载人舱、涵道式侧推动力装置、举升旋翼、设备仓以及转向舵;
所述载人舱的上部设置有视窗,底部边缘设置有滑行轮,后壁设置有舱门;
所述涵道式侧推动力装置设置有两个,对称设置于所述载人舱的两侧,所述涵道式侧推动力装置由侧推旋翼、第一动力设备、第一支撑臂和气流涵道共四部分组成,所述涵道式侧推动力装置的涵道内设置有多组侧推旋翼,所述侧推旋翼的后端设置有驱动所述侧推旋翼运转的第一动力设备,所述动力设备通过第一支撑臂固定在气流涵道的内壁上;
所述举升旋翼设置有多个,并列分布于所述载人舱的两侧,每个所述举升旋翼的下端分别设置有驱动所述举升旋翼运转的第二动力设备,所述动力设备通过第二支撑臂固定在导流筒罩和所述载人舱对应的外壁;
所述设备仓设置于所述载人舱的底部,其内设置有供所述第一动力设备和第二动力设备运转的动力源和电子设备;
所述转向舵设置于所述载人舱的顶部。
进一步,所述载人舱为车厢状立体结构,可容纳多人乘坐。
进一步,所述载人舱的顶部设置有降落伞。
进一步,所述举升旋翼外竖向设置有导流筒罩,导流筒罩之间紧密相连相互固定。
进一步,各个所述举升旋翼并列分布于所述载人舱的两侧,在举升旋翼的平面外侧还可以对称增加设置举升旋翼的数量以增加举升动力,所述举升旋翼的传动轴通过支撑臂与导流筒罩和所述载人舱对应的外壁相固定。
进一步,所述涵道式侧推动力装置也可以根据空气动力学进行整体设计,如同喷气式飞机的发动机一样由进气道、压气机、燃烧室、涡轮机、和喷气口几部分组成;所述涵道式侧推动力装置也可以设置在载人舱四周的其他位置或者舱体内,比如载人舱舱体的顶部或底部等位置。
进一步,所述第一动力设备和第二动力设备均采用发动机或电动机。
进一步,所述第一动力设备和第二动力设备均采用发动机时,所述动力源为燃油;所述第一动力设备和第二动力设备均采用电动机时,所述动力源为蓄电池组。
进一步,所述举升旋翼的导流筒罩,导流筒罩沿气流方向的长度可以根据需要通过计算和实验确定,随着导流筒罩沿气流方向的长度加长,导流筒罩从而形成气流涵道有利于气流产生更强的推力。
进一步,所述举升旋翼和侧推旋翼的同轴的旋翼数量都可以根据需要设计为单组、双组或多组,多组旋翼通过同轴叠加旋转如同喷气式飞机的发动机转子一样有利于气流产生更强的推力。
本发明的有益效果体现在:
1、与现有技术的多旋翼载人飞行器相比,本发明多旋翼载人飞行器的举升旋翼位于车厢状立体结构载人舱的中部或上部,机体结构设计新颖,飞行器的重心位于举升旋翼的下面,有利于飞行器的稳定飞行,载人舱相对于举升旋翼垂直方向上的位置关系相对合理。而现有技术的多旋翼载人飞行器由于没有打破现有飞行器的机体结构,受飞行器机架和机臂的结构限制,载人舱要么设置于飞行器机架的上面如广州亿航EHang公司研发的多旋翼载人飞行器,载人舱要么设置于飞行器机架的下面如法国空客CityAirBus和美国LiftAircraft等公司研发的多旋翼载人飞行器。
2、与现有技术的多旋翼载人飞行器相比,本发明多旋翼载人飞行器的设计灵感来源于现有无人飞行器和汽车,本发明打破了现有无人飞行器机体结构的机架和机臂的结构限制,在飞行器的旋翼中间设置一个车厢状立体结构的舱体用于载人(可容纳多人乘坐)或载货,舱体空间大而实用,从而可以在未来多旋翼载人和载货飞行器应用领域得到突破和发展。而现有技术的多旋翼载人飞行器由于受到飞行器机体结构的设计限制,相同占地投影面积的飞行器,载人舱舱体相对较小只能容纳1至2人乘坐。
3、与现有技术的多旋翼载人飞行器相比,本发明多旋翼载人飞行器载人舱的两侧对称设置有两个涵道式侧推动力装置提供侧推动力,可以产生强劲的侧推动力可以提高飞行速度,同时还可以有效避免飞行过程中侧推气流和举升气流之间产生的气动干扰。而现有技术的多旋翼载人飞行器一般都没有设置侧推动力装置,一般都采用旋翼倾角提供侧推动力,侧推动力相对较弱。
4、与现有技术的多旋翼载人飞行器相比,本发明多旋翼载人飞行器同轴的举升旋翼设计为多组,多组举升旋翼通过同轴叠加旋转如同喷气式飞机的发动机转子一样有利于气流产生更强的推力。而现有技术的多旋翼载人飞行器同轴的举升旋翼一般只设置有单组或双组。
5、与现有技术的多旋翼载人飞行器相比,本发明多旋翼载人飞行器的举升旋翼外竖向设置有导流筒罩,导流筒罩之间紧密相连相互固定,导流筒罩沿气流方向的长度可以根据需要通过计算和实验确定,随着导流筒罩沿气流方向的长度加长,导流筒罩从而形成气流涵道有利于气流产生更强的推力,同时导流筒罩还能保护举升旋翼的安全,也有利于乘客上下飞行器时的安全。而现有技术的多旋翼载人飞行器的举升旋翼外一般都没有设置竖向的导流筒罩,或导流筒罩没有形成气流涵道。
6、与现有技术的多旋翼载人飞行器相比,本发明多旋翼载人飞行器举升旋翼的下端分别设置有驱动所述举升旋翼运转的动力设备,由多个动力设备提供举升动力,可控性更好、安全性更高,因为多个动力设备提供举升动力如果其中一个动力设备发生故障其余动力设备仍可以继续提供举升动力所以安全性更高。而现有技术的多旋翼载人飞行器一般采用中央动力输出,由于采用中央动力输出,飞行器的动力系统一但失灵,则整个飞行器将失去动力。
7、与现有技术的多旋翼载人飞行器相比,本发明多旋翼载人飞行器举升旋翼的下端分别设置有驱动所述举升旋翼运转的动力设备,不需要通过机体结构传递动力,本发明打破了现有无人飞行器机体结构的机架和机臂的结构限制,从而可以在飞行器的旋翼中间设置一个车厢状立体结构的舱体用于载人或载货。而现有技术的多旋翼载人飞行器一般都采用中央动力输出,飞行器的传动装置导致飞行器的动力系统需要保持在同一平面上,从而限制了飞行器载人舱的设置,飞行器的载人舱只能设置在飞行器机架的上面或下面。
8、与现有技术的多旋翼载人飞行器相比,本发明多旋翼载人飞行器载人舱的顶部设置有转向舵用于操控方向,同时也可以通过操控侧推动力装置用于转向,飞行器转向操控更加灵活。
综上所述,本发明的飞行、起降类同现有无人飞行器,具有机体结构新颖、舱体大而实用、侧推动力强劲、转向操控灵活的优势。
附图说明
为了更清楚地说明本发明具体实施方式或现有技术中的技术方案,下面将对具体实施方式或现有技术描述中所需要使用的附图作简单地介绍。在所有附图中,类似的元件或部分一般由类似的附图标记标识。附图中,各元件或部分并不一定按照实际的比例绘制。
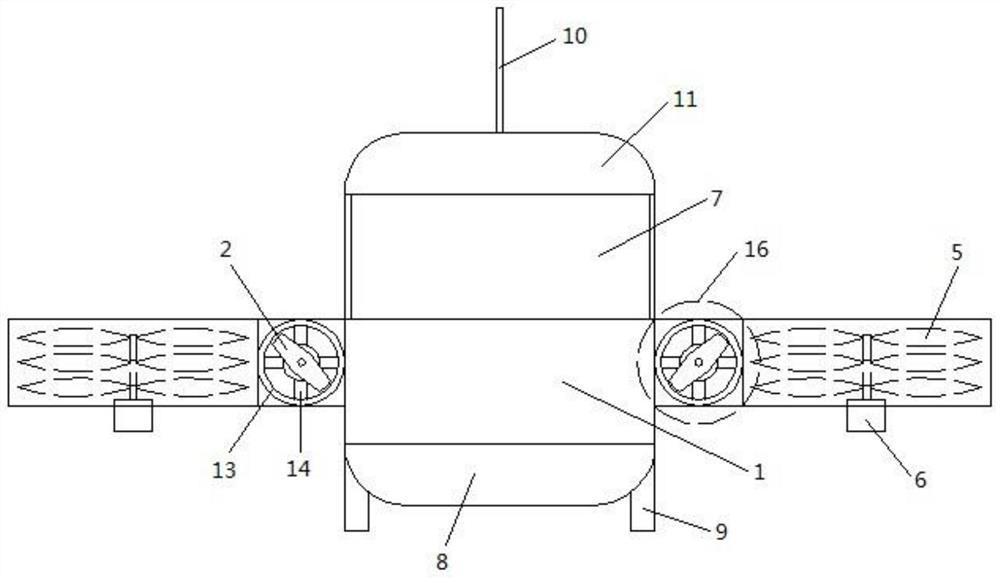
图1为实施例1的主视图;
图2为实施例1的俯视图;
图3为实施例1的侧视图;
图4为实施例2的主视图;
图5为实施例2的俯视图;
图6为实施例2的侧视图;
图7为实施例3的主视图;
图8为实施例3的俯视图;
图9为实施例3的侧视图。
附图中,载人舱1、侧推旋翼2、第一动力设备3、舱门4、举升旋翼5、第二动力设备6、视窗7、设备仓8、滑行轮9、转向舵10、降落伞11、导流筒罩12、气流涵道13、第一支撑臂14、第二支撑臂15、涵道式侧推动力装置16。
具体实施方式
下面将结合附图对本发明技术方案的实施例进行详细的描述。以下实施例仅用于更加清楚地说明本发明的技术方案,因此只作为示例,而不能以此来限制本发明的保护范围。
需要注意的是,除非另有说明,本申请使用的技术术语或者科学术语应当为本发明所属领域技术人员所理解的通常意义。
实施例1
如图1、图2和图3所示,一种侧推动力装置为涵道式的多旋翼载人飞行器,包括载人舱1、涵道式侧推动力装置16、举升旋翼5、设备仓8以及转向舵10;
所述载人舱1的上部设置有视窗7,底部边缘设置有滑行轮9,后壁设置有舱门4;
所述涵道式侧推动力装置16设置有两个,对称设置于所述载人舱1的两侧以及所述举升旋翼5的外侧,所述涵道式侧推动力装置16由侧推旋翼2、第一动力设备3、第一支撑臂14和气流涵道13共四部分组成,所述涵道式侧推动力装置16的涵道内设置有多组侧推旋翼2,所述侧推旋翼2的后端设置有驱动所述侧推旋翼2运转的第一动力设备3,所述动力设备通过第一支撑臂14固定在气流涵道13的内壁上;
所述举升旋翼5设置有二十四个,分四排,每排六个举升旋翼5,并列矩阵分布于所述载人舱1的两侧以及所述载人舱1的视窗7的下面,以及所述涵道式侧推动力装置16的内侧,每个所述举升旋翼5的下端分别设置有驱动所述举升旋翼5运转的第二动力设备6,所述动力设备通过第二支撑臂15固定在导流筒罩12和所述载人舱1对应的外壁,导流筒罩之间紧密相连相互固定。
所述设备仓8设置于所述载人舱1的底部,其内设置有供所述第一动力设备3和第二动力设备6运转的动力源和电子设备;其中,第一动力设备3和第二动力设备6均采用发动机,动力源为燃油;
所述转向舵10设置于所述载人舱1的顶部。
具体的,所述载人舱1为车厢状立体结构,可容纳多人乘坐。
具体的,所述载人舱1的顶部设置有降落伞11,可以在紧急情况下保障驾乘人员安全。
具体的,所述举升旋翼5外竖向设置有导流筒罩12,提升举升旋翼5运转产生的举升力聚集程度,从而提升动力源的能量利用率,也可以起到保护举升旋翼5的作用,导流筒罩12之间紧密相连相互固定。
具体的,各个所述举升旋翼5并列分布于所述载人舱1的两侧,所述举升旋翼5的传动轴通过支撑臂与导流筒罩12和所述载人舱1对应的外壁相固定。
具体的,所述侧推旋翼2外水平设置有气流涵道13,提升侧推旋翼2运转产生的侧推力聚集程度,从而提升动力源的能量利用率,也可以起到保护侧推旋翼2的作用。
具体的,所述涵道式侧推动力装置16可以产生强劲的侧推动力可以提高飞行速度,同时还可以有效避免飞行过程中侧推气流和举升气流之间产生的气动干扰。
具体的,所述举升旋翼5的导流筒罩12,导流筒罩12沿气流方向的长度可以根据需要通过计算和实验确定,随着导流筒罩12沿气流方向的长度加长,导流筒罩12从而形成气流涵道有利于气流产生更强的推力。
具体的,所述举升旋翼5的同轴的旋翼设计为多组,多组旋翼通过同轴叠加旋转如同喷气式飞机的发动机转子一样有利于气流产生更强的推力。
特别的,所述转向舵10设置于所述载人舱1顶部,当载人舱1的舱体较长较宽时,转向舵10转向操控效果不佳的情况下,可以把转向舵10替换成转向旋翼,通过转向旋翼正反转产生正反向推力推动载人舱1的舱体转向。
实施例2
如图4、图5和图6所示,与实施例1的区别在于:
所述涵道式侧推动力装置16设置有两个,对称设置于所述载人舱1的两侧以及所述视窗7的下面;
所述举升旋翼5设置有六个,分两排,每排三个举升旋翼5,举升旋翼5的直径相对较大,并列分布于所述载人舱1的两侧以及所述涵道式侧推动力装置16的外侧;
所述设备仓8设置于所述载人舱1的底部,其内设置有供所述第一动力设备3和第二动力设备6运转的动力源和电子设备;其中,第一动力设备3和第二动力设备6均采用电动机,动力源为蓄电池组。
实施例3
如图7、图8和图9所示,与实施例1的区别在于:
所述涵道式侧推动力装置16设置有两个,对称设置于所述载人舱1的两侧以及所述视窗7的上面;
所述举升旋翼5设置有六个,分两排,每排三个举升旋翼5,举升旋翼5的直径相对较大,并列分布于所述载人舱1的两侧以及所述涵道式侧推动力装置16的外侧;
所述设备仓8设置于所述载人舱1的底部,其内设置有供所述第一动力设备3和第二动力设备6运转的动力源和电子设备;其中,第一动力设备3和第二动力设备6均采用电动机,动力源为蓄电池组。
实施例的工作原理:
本发明打破了现有无人飞行器机体结构的机架和机臂的结构限制,在现有无人飞行器的旋翼中间设置一个车厢状立体结构的舱体用于载人或载货,就像一个拥有载人舱的大型无人飞行器一样,从而可以实现载人飞行。
本发明的工作原理类同广州亿航EHang、日本SkyDrive、法国空客CityAirBus和美国Lift Aircraft的多旋翼载人飞行器,本发明载人飞行器不是大重量级的飞行器。
本发明多旋翼载人飞行器由自动驾驶飞行控制系统操控飞行,不需要专业飞机驾驶员,也不需要设计可供非专业人士操作的操纵机构,当普通民众需要出行时乘座飞行器并开打电源设置目的地,网络连接到民用航空交通管理中心,由民用航空交通管理中心规划航线,并通过自动驾驶飞行控制系统操控飞行器飞行,飞行原理同现有无人飞行器的飞行原理相一致,普通民众只是乘座,可以不参与驾驶,从而可以应用于普通民众的日常出行。
本发明车厢状立体结构的载人舱1和举升旋翼5的机体结构设计如同现有多旋翼载人飞行器一样,通过操控举升旋翼5的转速,可以实现飞行器的垂直起飞降落和悬停,可以实现飞行器在常规场地上起飞和降落;通过操控侧推旋翼2的转速可以控制飞行器的水平飞行速度;通过同时操控举升旋翼5和侧推旋翼2的转速可以实现飞行器的水平飞行和垂直起飞降落悬停;通过调整转向舵10的角度可以改变飞行器的飞行方向。本发明多旋翼载人飞行器载人舱1的重心位于举升旋翼5的下面,从而有利于飞行器的稳定飞行。
现有商用飞机之所以不能像汽车一样普及民用,其主要原因有四:一、需要机场,二、需要飞机驾驶员,三、价格昂贵,四、缺乏民用航空交通安全管理系统。而本发明可以在普通场地实现起飞和降落,不需要专业的飞机驾驶员,价格与现有小轿车价格相当,在民用航空交通安全管理系统逐步形成和完善的情况下就可以实现普及民用。
最后应说明的是:以上各实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述各实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的范围,其均应涵盖在本发明的权利要求和说明书的范围当中。
- 一种侧推动力装置为涵道式的多旋翼载人飞行器
- 便携式多涵道螺旋桨载人电动飞行器