一种基于边缘计算的室内外无缝定位系统及方法
文献发布时间:2023-06-19 10:46:31
技术领域
本发明属于本发明属于自动化、通信与计算机技术领域,具体涉及一种基于边缘计算的室内外无缝定位系统。
背景技术
定位技术是工业、交通等多种应用领域的关键技术之一。室外主要的定位技术是GNSS(Global Navigation Satellite System,全球导航卫星系统),室内定位则有基于WiFi、Zigbee、蓝牙和超宽带(UWB)等无线通信技术的方案以及基于视觉的方案等。在移动设备上,目前这两类定位技术是彼此独立的。但在很多场合需要把这些定位方法结合起来,忽略室内室外的区别,为移动设备提供透明的定位服务,例如跨建筑搬运的车辆或机器人,经过复杂地下隧道系统的车辆等。
中国专利申请:基于GNSS/INS/UWB组合的室内外无缝定位方法(申请号:201910924441.3),本发明提供了一种基于GNSS/INS/UWB组合的室内外无缝定位方法,室外采用GNSS/INS紧组合定位,室内采用UWB/INS紧组合定位,为用户提供室内外导航解决方案。该方法未考虑室内外场景交界处的定位数据的处理以及在室内外场景转换时的情况。该方法采用紧组合方式,室内定位方式被限定为UWB。
中国专利申请:一种智能切换的室内外无缝定位系统(申请号:201910440170.4),本发明提供一种智能切换的室内外无缝定位系统,所述定位系统根据收到的卫星数目和接收到UWB信号的定位基站数据确定终端设备当前所处的状态。该方法使用加权融合的方法融合室内外定位结果,该方法完全依赖GNSS与UWB设备,未使用INS做组合定位,一旦GNSS或UWB出现波动,定位结果会失效。
中国专利申请:基于态势感知的室内外无缝定位装置和方法(申请号:201610003516.0)本发明提出了一种基于态势感知的室内外无缝定位装置和方法,能解决因室内外定位系统小范围覆盖以及存在定位覆盖盲区引起的定位精度问题。该方法仅通过态势感知的方法判断定位终端当前的区域类型,并为不同的定位方法所产生的定位数据进行融合,若判断区域类型出错,则无法完成定位。
发明内容
本发明旨在解决以上现有技术的问题。提出了一种基于边缘计算的室内外无缝定位系统及方法,本发明的技术方案如下:
一种基于边缘计算的室内外无缝定位系统,包括室内定位端和移动端两个部分,用于屏蔽室外场景,室内场景及室内外交接场景的差异,为多个移动端情况下基于定位的服务提供透明的位置服务。
进一步的,所述室内定位端包括一组室内定位设备,边缘计算节点和通信模块。所述室内定位设备由多个室内定位传感器组成,包括但不限于摄像头、激光雷达等传感器。室内定位设备实时检测到移动端目标后,输出目标室内定位数据,发送至对应的边缘计算节点。所述边缘计算节点对多个室内定位传感器的定位数据进行关联、融合,将目标室内定位结果发送给移动端。
所述移动端包括GNSS(Global Navigation Satellite System,全球导航卫星系统)模块,IMU(Inertial Measurement Unit,惯性测量单元)模块,融合定位模块和通信模块。所述GNSS模块提供移动端目标的室外定位数据;所述IMU 模块根据移动端目标的自身姿态实时提供加速度和角速度数据;所述融合定位模块接收GNSS模块,IMU模块和室内定位端的定位数据,构造联邦滤波器进行融合滤波,输出移动端目标位置的最优估计;所述通信模块接收室内定位端提供的移动端目标的定位数据。
进一步的,所述室外场景,室内场景及室内外交接场景中,室外场景下无有效的室内定位数据,只有有效的室外定位数据;室内定位场景下无有效的室外定位数据,只有有效的室内定位数据;室内外交接场景既有有效的室内定位数据,也有有效的室外定位数据。
进一步的,所述室内定位端的边缘计算节点功能包括:
(1)管理一组隶属于本室内定位设备的传感器;
(2)接收移动端的实时广播定位数据,建立全局轨迹,边缘计算节点之间共享该轨迹;
(3)当多个定位目标从室外环境移动到室内环境时,接收多个隶属于本室内定位设备的传感器检测的目标位置量测数据,进行融合估计得到目标室内定位数据;
(4)室内定位端边缘计算节点通过全局轨迹和移动端当前的运动状态进行目标数据关联,确定目标身份,根据数据关联结果将目标室内定位数据发送至对应目标的移动端。
进一步的,所述通过全局轨迹和目标当前的运动状态进行目标数据关联的方法,包括但不限于最近邻方法、概率数据关联、联合概率数据关联等方法。
进一步的,所述GNSS模块生成定位数据格式为
进一步的,所述GNSS定位数据、室内定位数据均需要转化到全局坐标系下。
进一步的,移动端融合定位模块的滤波器模型如下:
(1)以移动端IMU和GNSS数据构造IMU/GNSS子滤波器(记为LF1),通过Kalman滤波得到局部估计
(2)分别以IMU数据和来自多个室内定位端的定位数据构造IMU/室内定位子滤波器(记为LF2-LFn),通过Kalman滤波得到移动端位置的局部估计
(3)将步骤(1)和步骤(2)中各子滤波器LF1及LF2~LFn的局部估计
进一步的,移动端融合定位模块的滤波器,在计算全局最优估计
进一步的,移动端融合定位模块的滤波器计算过程包括以下步骤:
(1)建立不同室内定位设备的有效工作区域,移动端根据定位数据判断自身所处的室内定位设备有效工作区域,根据该区域对相应的子滤波器的量测噪声协方差阵R
(2)当移动端切换定位区域时,动态修改相应定位区域的量测噪声协方差阵 R
进一步的,一种基于上述室内外无缝定位系统的定位方法,包括以下步骤:
(1)移动端通过GNSS模块获取室外定位数据;
(2)移动端判断当前室外定位信号是否正常,若正常,则接收室外定位数据,若异常,则标记室外定位失败信息;
(3)移动端设定全局坐标原点,根据该坐标原点将室外定位数据GNSS坐标值转化至全局坐标系下,并保存转换后的坐标点;
(4)移动端访问室内定位信息,搜索当前可连接的室内定位端,向所有可连接的室内定位端广播自身当前定位数据;
(5)室内定位端边缘计算节点根据收到的多个移动端定位数据,针对不同的移动端建立多条全局轨迹,并将该轨迹共享至其他边缘计算节点;
(6)室内定位端边缘计算节点接收自身所管理的多个室内定位设备的目标定位数据,进行融合估计得到目标室内定位数据;
(7)室内定位端边缘计算节点通过全局轨迹和移动端当前的运动状态进行目标数据关联,确定目标身份,根据数据关联结果将目标室内定位数据发送至对应目标的移动端;
(8)移动端接收到室内定位数据后,将室内定位数据转化至全局坐标系下。如移动端未收到相应的室内定位数据,则将室内定位数据标记为无效;
(9)移动端IMU模块采集加速度与姿态信息;
(10)移动端融合定位模块通过融合定位滤波器将上述步骤(3),步骤(8),步骤(9)所获得的定位数据进行融合滤波,输出移动端位置的全局最优估计值
(11)重复上述步骤(1)-(11),实现移动端室内外无缝定位。
本发明的优点及有益效果如下:
本发明针对现有定位技术在多个移动端、跨室内外场景时的局限性,提出一种基于边缘计算的室内外无缝定位系统,可在室内外环境下对移动端目标进行无差别的透明的定位,有效解决室内外定位不兼容、不统一的问题,可屏蔽室内外场景的差异,为移动端提供透明的位置服务,扩展了定位服务的使用场景,降低了基于位置的应用开发的复杂性。同时,本发明支持多种类型的的室内定位传感器,包括但不限于摄像头、毫米波及激光雷达等,容易在现有的室内监控设备上进行升级来实现,降低实施难度与成本。
附图说明
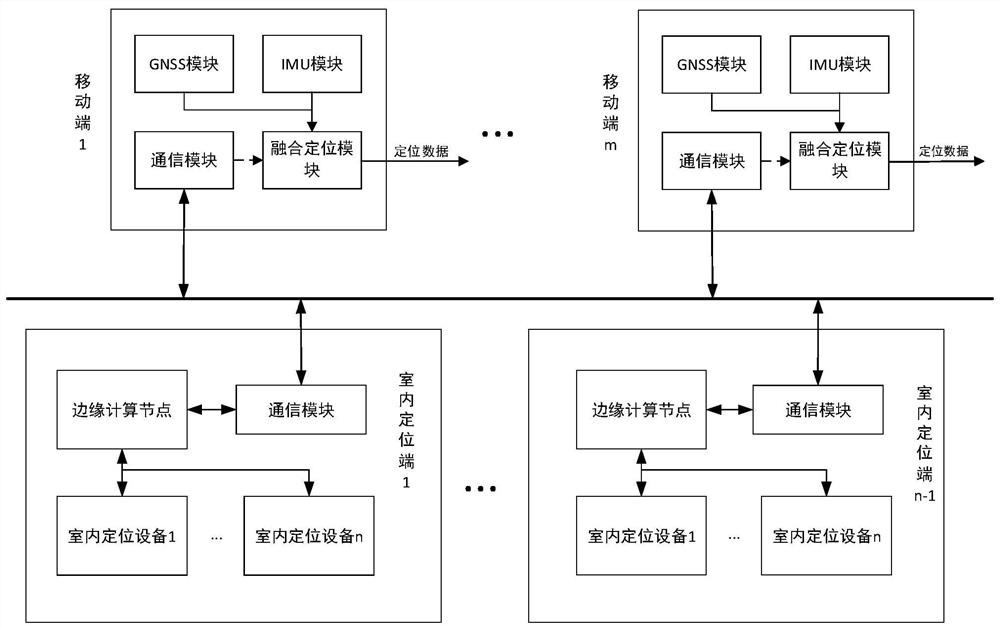
图1是本发明提供优选实施例的一种基于边缘计算的室内外无缝定位系统总体架构图;
图2是本发明一种基于边缘计算的室内外无缝定位系统工作流程图;
图3是本发明移动端融合定位滤波器结构图。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、详细地描述。所描述的实施例仅仅是本发明的一部分实施例。
以下结合附图和具体实例对本发明的具体实施方式进行描述。
图1所示为本发明一种基于边缘计算的室内外无缝定位系统的总体架构图。本发明提出一种基于边缘计算的室内外无缝定位系统,可用于屏蔽室外场景,室内场景及室内外交接场景的差异。其中,室外场景下无有效的室内定位数据,只有有效的室外定位数据;室内定位场景下无有效的室外定位数据,只有有效的室内定位数据;室内外交接场景既有有效的室内定位数据,也有有效的室外定位数据。
本系统包括室内定位端和移动端两个部分。
室内定位端包括一组室内定位设备,边缘计算节点和通信模块。
其中,室内定位设备由多个室内定位传感器组成,包括但不限于摄像头、毫米波及激光雷达等可以检测目标并确定目标位置的传感器,室内定位设备实时检测到移动端目标,输出目标室内定位数据,发送至对应的边缘计算节点;边缘计算节点对多个室内定位传感器的定位数据进行关联、融合,将目标室内定位结果发送给移动端;通信模块接收移动端广播的位置,并将室内定位数据发送给移动端。
移动端包括GNSS模块,IMU模块,融合定位模块和通信模块。
其中,GNSS模块提供移动端目标的室外定位数据;IMU模块根据移动端目标的自身姿态实时提供加速度和角速度数据;融合定位模块接收GNSS模块, IMU模块和室内定位端的定位数据,构造联邦滤波器进行融合滤波,输出移动端目标位置的最优估计;通信模块接收室内定位端提供的移动端目标的定位数据,并对外广播移动端自身位置。
图2为本发明一种基于边缘计算的室内外无缝定位系统实施流程图,包括移动端流程、室内定位端流程以及两者的交互。
移动端的实施流程:
(1)移动端通过GNSS模块获取室外定位数据;
(2)移动端判断当前室外定位信号是否正常,若正常,则接收室外定位数据,若异常,则标记室外定位失败信息;
(3)移动端设定全局坐标原点,根据该坐标原点将室外定位数据GNSS坐标值转化至全局坐标系下,并保存转换后的坐标点;
(4)移动端访问室内定位信息,搜索当前可连接的室内定位端的边缘计算节点,向所有可连接的室内定位端广播自身当前定位数据;
(5)移动端接收到室内定位数据后,将室内定位数据转化至全局坐标系下。如移动端未收到相应的室内定位数据,则将室内定位数据标记为无效;
(6)移动端IMU模块采集加速度与姿态信息;
(7)移动端融合定位模块通过融合定位滤波器将获得的GNSS定位数据、 IMU数据以及室内定位数据进行融合滤波,输出移动端位置的全局最优估计值
室内定位端的实施流程:
(1)室内定位端边缘计算节点根据收到的多个移动端定位数据,针对不同的移动端建立多条全局轨迹,并将该轨迹共享至其他边缘计算节点;
(2)室内定位端室内定位设备检测目标,并发送给边缘计算节点;
(3)室内定位端边缘计算节点接收自身所管理的多个室内定位设备的目标定位数据;
(4)室内定位端边缘计算节点进行融合估计得到目标室内定位数据;
(5)室内定位端边缘计算节点通过全局轨迹和移动端当前的运动状态进行目标数据关联,确定目标身份;
(6)根据数据关联结果将目标室内定位数据发送至对应目标的移动端。
图3为本发明移动端融合定位滤波器的结构图。
融合滤波器采用联邦Kalman滤波器架构,由多个子滤波器构成,各子滤波器系统的状态方程与观测方程为:
X
Z
其中,X
以IMU数据和GNSS数据为IMU/GNSS定位子滤波器(记为LF1)的量测值,通过Kalman滤波得到局部估计
设
(1)信息分配:
式中,β
各子滤波器和主滤波器进行时间更新:
P
(2)各子滤波器进行测量更新:
(3)主滤波器进行信息融合,得到全局最优估计。
其中,规定适当的阈值矩阵T,当移动端离开当前传感器的有效工作区域后,相应的R设定为阈值矩阵T,相应子滤波器在信息融合中的权重与
以上这些实施例应理解为仅用于说明本发明而不用于限制本发明的保护范围。在阅读了本发明的记载的内容之后,技术人员可以对本发明作各种改动或修改,这些等效变化和修饰同样落入本发明权利要求所限定的范围。
- 一种基于边缘计算的室内外无缝定位系统及方法
- 一种基于灰色预测模型的室内外无缝定位系统及方法