部署装置
文献发布时间:2023-06-19 10:58:46
本发明涉及用于部署两个仪器的装置。本发明尤其应用于必须部署在轨道中的空间设备领域,并且更特别地应用至用于卫星的空间设备,诸如天线、反射镜或其它仪器。然而,本发明应用于期望从支承结构部署至少两个仪器的组件的任何其它领域。
在本专利申请中在太空领域中描述了本发明,并且将以天线形式的仪器作为其主要示例,这是因为天线与本发明特别相关。尽管如此,本发明可以以类似方式应用于其它仪器和/或除太空外的其它背景。
通常将天线放在卫星上,以便将带宽发送到地球。现有解决方案包括:使用将天线收起(stowing)在卫星上的单个或两个堆叠机构、以及具有电动机组件的臂组件,电动机组件被指派给各个天线以用于部署各个天线。这限制了卫星的各个面(face)上的天线的数量。而且,为了能够部署多个天线,现有技术的解决方案涉及大量臂和电动机。这对卫星的外部配置具有负面后果,并且导致复杂的部署运动学。最后,必须承载大量臂和电动机的事实还意味着与天线的部署相联系的机构的组件的质量很高,而这是不期望的。
本发明旨在通过提出具有紧凑的优点的部署装置来解决上述问题中的全部问题或部分问题,这使得可以节省卫星上的空间和机载质量并且简化外部配置。
为此,本发明涉及一种被设计为定位在支承结构上的部署装置,该部署装置包括:
·第一仪器和第二仪器,
·部署机构,该部署机构包括:
ο主臂,该主臂一方面在第一附接点处连接至支承结构的面,并且另一方面连接至第一仪器,第二仪器连接至主臂,
ο主电动机,该主电动机被配置成相对于面致动主臂,
ο辅助电动机,该辅助电动机被配置成相对于主臂致动第二仪器,
这两个仪器能够从收起配置转换到部署配置和/或从部署配置转换到收起配置,在收起配置中,一个仪器在另一个仪器上地在支承结构的面上,在部署配置中,这两个仪器彼此远离并且远离支承结构。
有利地,该部署机构包括辅助臂,该辅助臂一方面在第二附接点处连接至主臂,并且另一方面连接至第二仪器。
有利地,该主电动机被配置成致动主臂以使之绕主旋转轴线相对于支承结构的面旋转。
有利地,该支承结构的面沿着由第一轴线X和第二轴线Y限定的平面XY延伸,该第二轴线Y基本上垂直于第一轴线X,并且该主轴线平行于平面XY。
有利地,该主轴线与平面XY相交。
有利地,该主轴线垂直于平面XY。
根据一个实施方式,N为大于或等于1的整数,至少主臂和/或辅助臂(若有的话)是通过N个臂区段和N个电动机连接至所述臂连接至的仪器的,各个电动机与臂区段相关联并且被配置为致动相关的臂区段,以便使所述臂连接至的仪器相对于这两个仪器中的另一个仪器进行定位。
根据本发明的一个实施方式,该仪器是天线。
本发明还涉及卫星,该卫星包括本申请中描述的至少一个部署装置。
通过阅读以示例的方式提供的一个实施方式的详细描述,将更好地理解本发明,并且进一步优点将变得显而易见,通过附图例示了该描述,其中:
·图1示意性地示出了根据本发明的处于收起配置的部署装置,
·图2示意性地示出了根据本发明的处于部署配置的部署装置,
·图3示意性地示出了根据本发明的部署装置,
·图4示意性地示出了处于收起配置、在部署期间以及处于部署配置的根据本发明的部署装置,
·图5示意性地示出了从上方看到的将根据本发明的部署装置的实施方式搁置在的支承结构的面的视图,
·图6示意性地示出了从上方看到的将根据本发明的部署装置的另一个实施方式搁置在的支承结构的面的视图,
·图7示意性地示出了处于部署配置的根据本发明的部署装置的另一个实施方式,
·图8示意性地示出了根据本发明的两个部署装置的部署运动学的视图,
·图9示意性地示出了包括根据本发明的至少一个部署装置的卫星。
为了清楚起见,在各个附图中,相同的元件具有相同标号。
图1示意性地示出了根据本发明的处于收起配置的部署装置10。根据本发明的部署装置10被设计成定位在支承结构80(例如,卫星)上。该部署装置包括第一仪器11和第二仪器12(例如,天线)、以及部署机构13。这两个仪器11、12能够从收起配置转换到部署配置和/或从部署配置转换到收起配置,在收起配置中,一个仪器在另一个仪器上地在支承结构80的面81上(如图1所示),在部署配置中,这两个仪器11、12彼此远离并且远离支承结构80。在收起配置中,仪器11、12一个在另一个之上。两个仪器可以一个放在另一个上,并且一个仪器的面与另一个仪器的面相接触。然而,在两个仪器之间没有物理接触的情况下,它们可以同等地一个在另一个之上。另外,处于收起配置的一个在另一个上的仪器11、12不必须完全重叠。一个仪器可以部分地覆盖另一个仪器。
在收起配置中,两个天线可以面朝彼此收起,也可以不面朝彼此收起。换句话说,所述天线中的一个天线的活动表面可以面对另一个天线的活动表面或者面对另一个天线的不活动表面。
应注意,本发明是利用两个天线来进行描述的,但是很明显,相同的原理应用于三个天线或更多天线,这些天线是以与下面将要说明的方式类似的方式叠置在收起位置并进行部署的。
图2示意性地示出了根据本发明的处于部署配置的部署装置10。部署机构13包括主臂14,该主臂一方面在第一附接点82处连接至支承结构80的面81,并且另一方面连接至第一仪器11。第二仪器12连接至主臂14。该部署机构还包括:主电动机15,该主电动机被配置成相对于面81致动主臂14;以及辅助电动机16,该辅助电动机被配置成相对于主臂14致动第二仪器12。将主电动机15有利地定位在第一附接点82处。主电动机15可以是单个电动机。根据致动要求,主电动机15将被理解为电动机组件,例如两个电动机或三个电动机。因此,根据本发明的部署装置使得可以仅使用两个电动机组件(主电动机和辅助电动机)以及单个臂来部署两个天线。
图3示意性地示出了根据本发明的部署装置10。部署装置10还可以包括用于定向第一仪器11的附加电动机17。
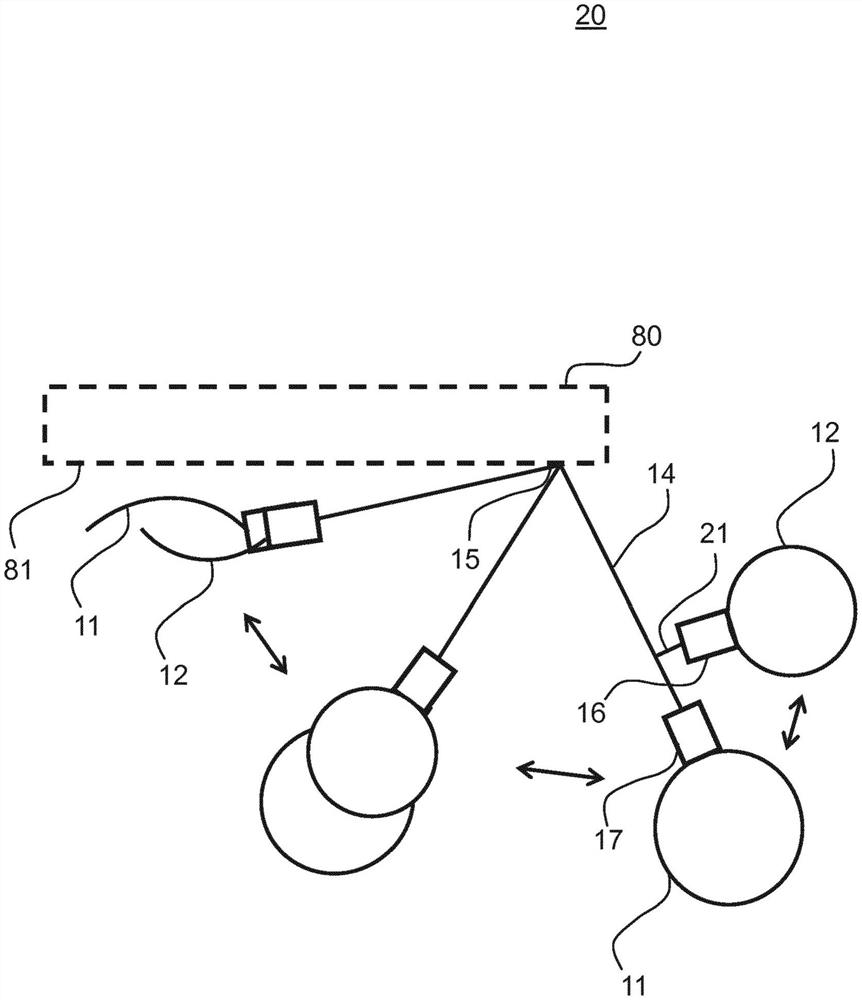
图4示意性地示出了处于收起配置、在部署期间以及处于部署配置的根据本发明的部署装置20。
在收起配置中,两个仪器11、12一个在另一个上并且靠近支承结构80的面81。
一旦卫星就位以执行其任务,就启用部署装置20,以转换到其部署配置。主电动机15致动主臂14,然后使主臂14相对于支承结构80移动。仪器11、12仍处于相互面对的位置。
在部署配置中,一旦主臂14已经到达其部署位置,就使这两个仪器彼此相对移动。辅助电动机16致动第二仪器12并将其定向到期望位置。在部署结束时,即,在部署配置中,两个仪器11、12彼此远离并且远离支承结构80。
这两个仪器彼此相对的移动存在两种可能场景。如果一个仪器(例如11)是以仪器11的活动面面对仪器12的不活动面(换句话说,仪器12“背对着”仪器11)的方式收起在仪器12上的,那么辅助电动机16可以被配置成使第二仪器12绕基本上垂直于主臂14的轴线旋转。由此在偏移位置,这两个仪器面对相同方向。
如果一个仪器(例如11)是以仪器11的活动面面对仪器12的活动面(换句话说,仪器12面对仪器11)的方式收起在仪器12上的,那么辅助电动机16被配置成使第二仪器绕位于在处于收起位置的两个仪器之间的平面之一中的轴线旋转。由此在部署位置处,这两个仪器面对相同方向。对于两个仪器11、12是以它们的不活动面彼此面对的方式收起的情况,也进行相同的部署。
通过逆向操作,还可以使两个仪器11、12从部署位置转换到收起配置:辅助电动机16致动第二仪器12以使该第二仪器面对第一仪器,并且主电动机15致动主臂14以使该主臂靠近支承结构80的面81。
在本发明的另一个实施方式中,部署机构13可以包括辅助臂21,该辅助臂一方面在第二附接点22处连接至主臂14,并且另一方面连接至第二仪器12。辅助臂21用于确定第二仪器12相对于第一仪器11以及相对于支承结构80的取向。
图5示意性地示出了从上方看到的将根据本发明的部署装置40的实施方式搁置在的支承结构80的面81的视图。如上所述,主电动机15被配置成致动主臂14。优选地,主臂14的致动是绕主旋转轴线31相对于支承结构80的面81旋转的。
如果支承结构80的面81被限定为沿着由第一轴线X和第二轴线Y限定的平面XY延伸,该第二轴线Y垂直于或基本上垂直于第一轴线X,则如图5所示,主轴线31可以平行于平面XY。
图6示意性地示出了从上方看到的在其上搁置根据本发明的部署装置30、50、60的另一个实施方式的支承结构80的面81的视图。在该实施方式中,主轴31可以与平面XY相交。在其它附图中,在部署配置中,主轴线31与面81形成一角度,并且该角度介于20°与40°之间,优选为约30°。该主轴线可以垂直于平面XY,即,处于90°,如图6中所示。
图7示意性地示出了处于部署配置的根据本发明的部署装置70的另一个实施方式。可以将至少一个臂(即,主臂14和/或辅助臂21)通过一个或更多个臂区段711、712以及一个或更多个电动机721、722连接至所述臂连接至的仪器11或相应的仪器12,各个电动机与臂区段相关联并且被配置为致动相关的臂区段,以便使所述臂连接至的仪器11或相应的仪器12相对于所述两个仪器中的另一个仪器进行定位。在例示示例中,部署装置的被定位在卫星的直接部分上的主臂14通过臂区段711以及与臂区段711相关联的电动机721连接至仪器11,借助于该电动机721,可以致动臂区段711以定位连接至主臂14的仪器11。
基于相同的原理,辅助臂21可以通过具有电动机723的另一个臂区段713连接至仪器12(71N和72N,N等于3),以对连接至辅助臂21的仪器12进行定向。可以设想其它臂区段。例如,如果臂是通过三个臂区段连接至其仪器的,那么将有三个其它电动机与这三个臂区段相关联。
N为大于或等于1的整数,臂14、21中的至少一个臂可以通过N个臂区段71N和N个电动机72N连接至所述臂连接至的仪器11、12,各个电动机与臂区段相关联并且被配置为致动相关的臂区段,以便使所述臂连接至的仪器11、12相对于所述两个仪器中的另一个仪器进行定位。
图8示意性地示出了根据本发明的两个部署装置的部署运动学的视图。各个装置均包括:第一仪器11和第二仪器12(如上所述),该装置可以包括多于两个仪器);部署机构13,该部署机构包括:主臂14,该主臂一方面连接至支承结构80的面81,并且另一方面连接至第一仪器11;主电动机,该主电动机被配置成相对于面81致动主臂14;以及辅助电动机16,该辅助电动机被配置成相对于主臂14致动第二仪器12。
随着所述装置的部署,各个部署装置均遵循特定预定义轨迹,并且其元件(臂和仪器)在该轨迹期间占据了也被预定义的特定体积。为了使该装置正确地部署而不会发生碰撞,视情况,根据要求和配置约束来对所述臂(主臂和辅助臂)、臂区段以及电动机进行定位。
本发明提供了这样一种解决方案,即,通过该解决方案,可以将卫星面上的臂和机构的数量减少1/2。这种解决方案还减少了设备方面的机载质量和成本。最后,在将主臂14与支承结构80相距一距离部署之后将所述两个仪器彼此相距一距离进行部署给天线的配置方面带来了新的可能性。
图9示意性地示出了包括根据本发明的至少一个部署装置的卫星90。在图8中,该卫星包括两个部署装置10、20。该卫星可以包括三个或更多个部署装置。根据上面呈现的变型例,部署装置可以彼此相同或不同。
这里所描述的装置包括两个天线11、12,但是各个部署装置均可以包括多于两个仪器。
最后,根据仪器的期望用途,部署装置可以在支承结构80的单个面上,或者在支承结构80的不同面上。
- 虚拟化网络功能VNF的部署方法、部署装置、部署设备
- 主从装置环境的部署方法与主从装置环境的部署系统