包括混合动力系的机器和相应的控制方法
文献发布时间:2023-06-19 10:58:46
技术领域
本发明总体上涉及一种机器,例如飞机,其装备有包括电动机和热机的动力系。
背景技术
现有技术中已知的是诸如飞行器的机器,其包括具有以下构造的动力系。该动力系包括螺旋桨、用于驱动螺旋桨的电动机、用于向电动机供应电力的电池、以及与交流发电机相关联的用于对电池充电的热机。
然而,在包括电池和电动机的电控系统发生故障的情况下,不再能够驱动螺旋桨。
因此,这种动力系的构造会引起严重的安全问题,特别是在起飞时。
从文献DE102012021340、EP2964524和US2010/219779中还已知这样的动力系,其构造仍然会引起总体尺寸和/或重量的问题。
本发明的目的是提出一种用于减轻上述问题中的一些或全部的新型机器。
发明内容
根据一个实施例,提出了一种配备有动力系的机器,例如飞行器,所述动力系包括:
-热动力系,包括热机和轴,该轴被称为热机的输出轴,该轴能够由热机驱动旋转;
-包括电动机的电动力系;
-电力供应系统,其包括用于向电动机供电的电池;
-螺旋桨推进系统,其包括螺旋桨和轴,该轴被称为螺旋桨轴,螺旋桨联接到该螺旋桨轴;
该动力系还包括离合器系统,该离合器系统被配置成选择性地:
-借助于热机驱动螺旋桨,而不将旋转从电动机传递到螺旋桨;
-借助于电动机驱动螺旋桨,而不将旋转从热机传递到螺旋桨;
-通过将热机的旋转运动传递到螺旋桨以及将电动机的旋转运动传递到螺旋桨的组合来驱动螺旋桨;
该动力系包括称为中间轴的轴,该轴刚性地连接到螺旋桨轴或者能够旋转地联接到螺旋桨轴,
并且离合器系统包括:
-第一离合器,该第一离合器被配置成在接合状态下将热机的旋转传递至中间轴,以及
-第二离合器,该第二离合器被配置成在接合状态下将中间轴的旋转传递至螺旋桨轴,和/或第三离合器,该第三离合器被配置成在接合状态下将电动机的旋转传递至螺旋桨轴;
该电动机包括定子和转子,该转子安装成在定子内围绕中间轴旋转,该转子和该中间轴同轴。
这种具有与中间轴的轴线同轴安装并围绕该中间轴的轴线旋转的转子的机器设计,该中间轴构成了运动传递系统的一部分,使得能够在紧凑性和重量方面实现节省(通过限制部件的数量),这使得能够增加所得到的功率(kW)与重量(kg)的比率。实际上,中间轴在转子内部延伸,并且形成机械传动线路的一部分的所述中间轴与转子的旋转轴线同轴。根据一个特定方面,所述中间轴也与螺旋桨轴和用于联接/断开中间轴与螺旋桨轴的离合器系统同轴。
根据一个特定方面,形成向螺旋桨传递运动的系统的一部分的每个轴与螺旋桨轴同轴。
根据一个特定方面,定子呈设置有绕组的中空主体的形式,并且转子设置有磁体。
根据一个特定方面,动力系还包括行星轮系类型的机械传动系统,其包括:
-内轴,被称为太阳轮,对应于中间轴的一部分,以及环形齿轮,由转子的中空主体的内部承载;
-行星轮,该行星轮设置在太阳轮与环形齿轮之间,以及行星架,行星架的与行星轮相对的端部被约束成与第二离合器的一部分一起旋转,第二离合器包括被约束成与螺旋桨轴一起旋转的另一部分。
根据一个特定方面,离合器系统包括第四离合器,第四离合器被配置成在接合状态下将热机的旋转传递到电动机以使其用作发电机。
根据一个特定方面,参与用于在一方面的热机和/或电动机与另一方面的螺旋桨轴之间传递运动的系统的各种轴是同轴的。换句话说,形成向螺旋桨轴传递运动的系统的一部分的每个轴与螺旋桨轴同轴。
根据一个特定方面,定子呈中空主体的形式,优选地在其内表面上设置有绕组和/或磁体,并且转子优选地在其外周面上设置有磁体和/或绕组。
根据一个实施例,提出了一种配备有动力系的机器,例如飞行器,所述动力系包括:
-热动力系,包括热机和轴,该轴被称为热机的输出轴,该轴能够由热机驱动旋转;
-包括电动机的电动力系;
-电力供应系统,其包括用于向电动机供电的电池;
-螺旋桨推进系统,其包括螺旋桨和轴,该轴被称为螺旋桨轴,螺旋桨联接到该螺旋桨轴;
其中:
该动力系还包括离合器系统,该离合器系统被配置成选择性地:
-借助于热机驱动螺旋桨,而不将旋转从电动机传递到螺旋桨;
-借助于电动机驱动螺旋桨,而不将旋转从热机传递到螺旋桨;
-通过将热机的旋转运动传递到螺旋桨以及将电动机的旋转运动传递到螺旋桨的组合来驱动螺旋桨。
因此,机器的螺旋桨动力系可以由电动力系和/或热动力系独立地或同时地驱动。安全性,特别是当机器是飞机时的起飞时的安全性得到提高,因为在电动力系中出现问题的情况下,热动力系能够接管驱动螺旋桨。
此外,仅使用电动力系的可能性使得飞行器能够以降低的噪声在城市或郊区起飞和着陆。
该机器还可以包括以下特征中的一个或多个,这些特征可以以任何技术上允许的组合形式存在。
根据一个特定方面,该动力系包括称为中间轴的轴,该轴刚性地连接到螺旋桨轴或者适于旋转地联接到螺旋桨轴,该离合器系统包括:
-第一离合器,该第一离合器被配置成在接合状态下将热机的旋转传递至中间轴,以及
-第二离合器和/或第三离合器,该第二离合器和/或第三离合器被配置成在接合状态下将电动机的旋转传递至螺旋桨轴。
根据一个特定方面,第二离合器在接合状态下使得将中间轴的旋转传递至螺旋桨轴。
根据一个特定方面,离合器系统包括第四离合器,第四离合器被配置成在接合状态下将热机的旋转传递到电动机以使其用作发电机。
根据一个特定方面,电动机包括:
-定子,该定子采取在其内表面上设置有绕组的中空主体的形式;
-转子,该转子采取在定子内围绕中间轴旋转的主体的形式,该转子在其外周面上设置有磁体。
根据一个特定方面,动力系包括传动系统,该传动系统包括例如离合器,用于在转子和中间轴之间传递旋转运动。
根据一个特定方面,动力系包括机械传动系统,如果存在第二离合器,则该机械传动系统用于在第二离合器的接合状态下将中间轴的旋转传递至螺旋桨轴。根据一个特定方面,机械传动系统是减速器系统。
机械传动系统有利地容纳在转子中。
机械传动系统包括例如行星轮系,该行星轮系具有联接到中间到轴的部分以及联接到第二离合器的部分,第二离合器的另一部分联接到螺旋桨轴。
根据一个特定方面,第二离合器包括例如经由机械传动系统旋转地联接到中间轴的部分,以及与螺旋桨轴旋转地联接,优选刚性地连接的部分。
根据一个特定方面,第四离合器包括在第一离合器的接合状态下被约束成与热机的输出轴一起旋转的部分和安装在电动机的转子上并且被约束成与电动机的转子一起旋转的另一部分。
根据一个特定方面,第三离合器包括被约束成通过机械传动系统与电动机的转子一起旋转的部分和被约束成与螺旋桨一起旋转的部分。
根据一个特定方面,电力供应系统还包括电力管理系统,该电力管理系统包括:
-高压单元,用于断开或闭合电池与电动机之间的供电电路;
-控制器,所述控制器用于处理由电池供应的电流或当电动机用作发电机时由电动机产生的电流。
根据一个特定实施例,提出了一种配备有动力系的机器,例如飞行器,所述动力系包括:
-热动力系,包括热机和轴,该轴被称为热机的输出轴,该轴能够由热机驱动旋转;
-包括电动机的电动力系;
-电力供应系统,其包括用于向电动机供电的电池;
-螺旋桨推进系统,其包括螺旋桨和轴,该轴被称为螺旋桨轴,螺旋桨联接到该螺旋桨轴;
该动力系还包括离合器系统,该离合器系统被配置成选择性地:
-借助于热机驱动螺旋桨,而不将电动机的旋转传递到螺旋桨;
-借助于电动机驱动螺旋桨,而不将热机的旋转传递到螺旋桨;
-通过将热机的旋转运动传递到螺旋桨以及将电动机的旋转运动传递到螺旋桨的组合来驱动螺旋桨;
该动力系包括称为中间轴的轴,该轴刚性地连接到螺旋桨轴或者能够旋转地联接到螺旋桨轴,
并且离合器系统包括:
-第一离合器,该第一离合器被配置成在接合状态下将热机的旋转传递至中间轴,以及
-第二离合器,该第二离合器被配置成在接合状态下将中间轴的旋转传递至螺旋桨轴,
该电动机包括:
-定子,该定子采用中空主体的形式,优选地例如在定子的内表面上设置有绕组;
-转子,该转子采用围绕中间轴旋转并位于定子内部的主体的形式,该转子优选地例如在其外周面上设置有磁体;
该动力系还包括行星轮系类型的机械传动系统,其包括:
-内轴,被称为太阳轮,对应于中间轴的一部分,以及环形齿轮,由转子的中空主体的内部承载;
-行星轮,该行星轮设置在太阳轮与环形齿轮之间,以及行星架,行星轮刚性地连接到行星架,行星架与中间轴和螺旋桨轴同轴,行星架的与行星轮相对的端部被约束成与第二离合器的一部分一起旋转,第二离合器包括被约束成与螺旋桨轴一起旋转的另一部分。
根据一个特定方面,因为行星轮系类型的机械传动系统容纳在转子中,其可以被认为包含在电动机中。
根据一个特定方面,离合器系统包括第三离合器,第三离合器被配置成在接合状态下将电动机的旋转,特别是转子的旋转传递至螺旋桨轴。
根据一个实施例,提出了一种用于控制如上所述的机器的方法,其中为了,特别是在起飞和/或爬升阶段期间,电力推进该机器,
离合器被带至以下配置:
-第一离合器脱离接合以将热机从螺旋桨释放;
-当存在第四离合器时,第四离合器和第二离合器优选地脱离接合;
-当存在第三离合器时,第三离合器接合以将电动机的运动传递到螺旋桨。
根据一个实施例,提出了一种用于控制如上所述的机器的方法,其中,为了不使用电动力系的热推进,例如当在电传动系统中发生故障时,
离合器被带至以下配置:
-第一离合器接合;
-第二离合器接合以将热机的运动传递到螺旋桨。
根据一个实施例,提出了一种用于控制如上所述的机器的方法,其中,为了通过组合使用热机和电动机进行推进,
离合器被带至以下配置:
-第一离合器接合;
-第二离合器接合以将热机的运动传递到螺旋桨;
-当存在第三离合器时,第三离合器接合以将电动机的运动传递到螺旋桨;
-当存在第四离合器时,第四离合器脱离接合。
根据一个实施例,提出了一种用于控制如上所述的机器的方法,其中,为了在维持螺旋桨的旋转驱动的同时使用热机对电池充电,例如为了在机器处于飞行时充电,离合器被带至以下配置:
第一离合器、第四离合器和第二离合器接合,使得热机驱动中间轴以使转子转动,转子优选地设置有面向定子的磁体,定子优选地设置有绕组,以在驱动螺旋桨轴的同时(在绕组中)产生电流;
并且其中,电力管理系统控制由用作发电机的电动机产生的电流以对电池充电。
根据一个实施例,提出了一种用于控制如上所述的机器的方法,其中,为了通过风力驱动或水力驱动效应回收能量,离合器被带至以下配置:
-第一离合器和/或第四离合器脱离接合以将螺旋桨与热机脱离联接或将转子与热机脱离联接;
-第二离合器优选地脱离接合;
-第三离合器接合以将螺旋桨的运动传递到电动机的转子。
根据一个实施例,提出了一种用于控制如上所述的机器的方法,其中,为了使用热机对电池充电而不驱动螺旋桨,离合器被带至以下配置:
第三离合器和第二离合器脱离接合,
第一离合器和第四离合器接合,
使得热机驱动中间轴以使转子转动,转子优选地设置有面向定子的磁体,定子优选地设置有绕组,以(在绕组中)产生电流,
并且其中,电力管理系统控制由用作发电机的电动机产生的电流以对电池充电。
根据一个实施例,提出了一种用于控制如上所述的机器的方法,其中,机器包括轮子,轮子设置有经由电力管理系统连接到机器的供电电池的电动力系,该方法包括通过电池向轮子的电动力系供电。
附图说明
从以下纯粹说明性且非限制性的描述中,本发明的其它特征和优点将变得更清楚,必须参考附图来阅读所述描述,其中:
图1是符合本发明的一个实施例的飞行器的示意图;
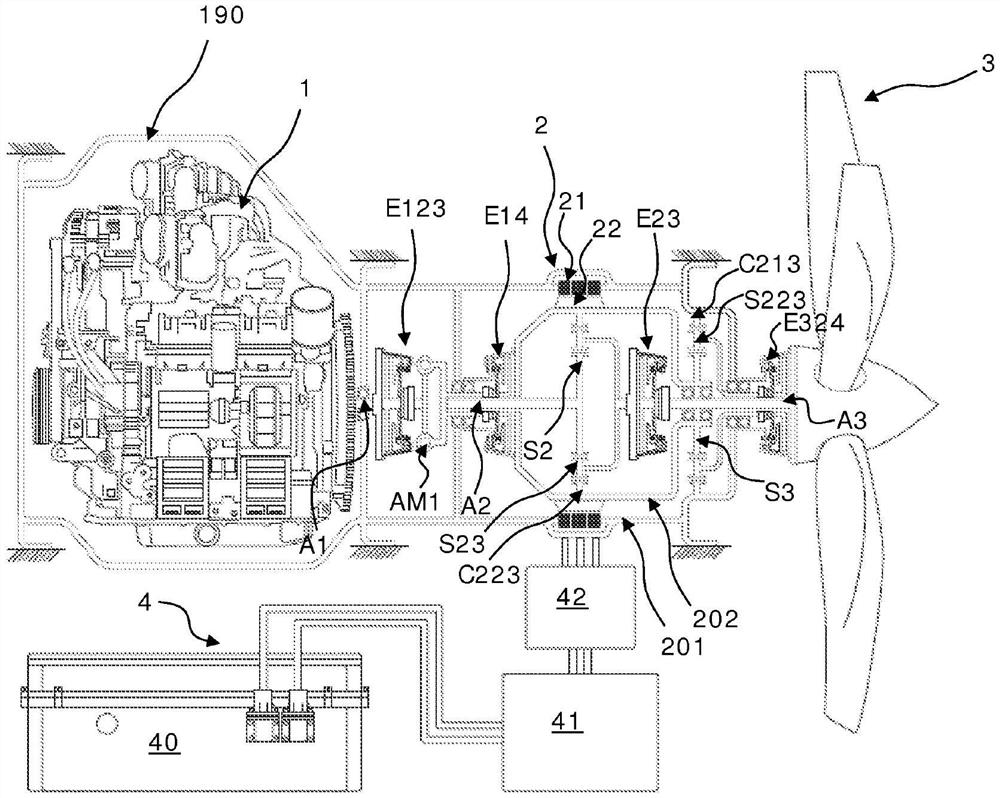
图1A是符合本发明的一个实施例的飞行器的动力系的示意图;
图2是符合本发明的一个实施例的飞行器在起飞和/或爬升时的示意图;
图2A是符合本发明的一个实施例的飞行器的动力系在电力推进模式下的示意图;
图2B是符合本发明的一个实施例的飞行器的动力系在热推进模式下的示意图;
图2C是符合本发明的一个实施例的飞行器的动力系在热和电推进模式下的示意图;
图3是符合本发明的一个实施例的空中飞行器在飞行时,例如在水平飞行时的示意图;
图3A是符合本发明的一个实施例的飞行器的动力系处于飞行中充电模式的示意图;
图4是符合本发明的一个实施例的飞行器在其降落期间的示意图;
图4A是符合本发明的一个实施例的飞行器的动力系处于电能回收模式的示意图;
图5是符合本发明的一个实施例的飞行器的示意图,该飞行器在地面上;
图5A是符合本发明的一个实施例的飞行器的动力系的示意图,其处于当飞行器在地面上时经由其热机的充电模式;
图6是一种变型动力系的示意图。
具体实施方式
下面将参照附图更完整地描述本发明的概念,在附图中示出了本发明的概念的实施例。在附图中,为了清楚起见,元件的尺寸和相对尺寸可能被放大。在所有附图中,相似的标号表示相似的元件。然而,本发明的这个概念可以被简化为以许多不同的形式来实施,并且不应被解释为限于这里描述的实施例。相反,提出这些实施例是为了使本说明书完整并将本发明的概念的范围传达给本领域技术人员。为了简单起见,参考飞行器的术语和结构来研究以下实施例。如下文所解释的,机器也可以是航海器。
说明书中任何地方对“一个实施例”的引用意味着:参考一个实施例描述的功能、结构或特定特征被包括在本发明的至少一个实施例中。因此,在整个说明书中的各个位置处出现的表述“在一个实施例中”不一定是指同一实施例。此外,功能、结构或特定特征可以以任何适当的方式组合在一个或多个实施例中。
在图1中示出了作为螺旋桨飞行器100的机器。飞行器例如是飞机、无人机或直升机。
飞行器100包括动力系,也称为动力模块,其包括壳体190和螺旋桨推进系统、热动力系和电动力系。如图1至图5中可见并且如下文所解释的,壳体190容纳热动力系、电动机2的转子202、由壳体190的一部分形成的定子201。
动力系可同样地应用于船舶推进,并且因此机器可以是航海器。该螺旋桨推进系统包括螺旋桨3和螺旋桨轴A3,螺旋桨3固定至该螺旋桨轴A3。
通过示例的方式,热机和/或电动机可以驱动一个或多个如图1中示意性示出的其它辅助螺旋桨推进系统3'。这种类型的构造可以称为“分布式推进”。
热动力系包括具有输出轴A1的热机1,该输出轴可由热机驱动旋转。热机可以例如以6000转/分钟的量级的速度转动。
根据一个特定方面,动力系包括用于校正/平稳热机的非周期性运转的扭矩阻尼器AM1。
电动力系包括电动机2。电动机2可以例如以6000转/分钟的量级的速度转动。电动力系还包括电力供应系统4,其包括用于向电动机2供电的电池40。
减速器系统,例如下文所述的行星轮系,使得螺旋桨能够以较低的速度,例如2000转/分钟的量级被驱动。
电力供应系统4还包括电力管理系统41、42,其包括用于断开或闭合电池40和电动机2之间的供电电路的高压单元41。电力供应系统4还包括控制器42,用于当电动机用作发电机时处理由电池40供应的或由电动机2产生的电流。
例如,控制器42还能够将来自电池40的直流电流转换成交流电流,例如通过将其斩波以向电动机2供电,并且相反地,当电动机2用作发电机时,特别是当电动机2的转子由热机1或螺旋桨3驱动时,将由电动机2产生的交流电流转换成直流电流以用于对电池40充电,如下文所述。
动力系还包括离合器系统,该离合器系统被配置成能够采用如在下文中详细描述的多个构造。
如下文所解释的,电动力系、热动力系和螺旋桨推进系统的布置,与离合器系统结合,选择性地:
仅通过热机1驱动螺旋桨推进系统3以推进飞行器;
在飞行器推进的意义上仅通过热机1驱动螺旋桨推进系统3,并通过热机1驱动电动机2以对电池以及可能地一个或多个其他电池充电;
仅通过电动力系2驱动螺旋桨推进系统3以推进飞行器;
通过传递到螺旋桨轴的热机1的输出轴的旋转运动以及也传递到螺旋桨轴(或螺旋桨3)的电动机2的旋转运动来驱动螺旋桨推进系统3。换句话说,在这种情况下,螺旋桨的旋转是由热机和电动机的组合旋转运动传递到螺旋桨轴A3(或螺旋桨3)而产生的。
根据一个特定实施例,动力系的离合器系统具有用于在螺旋桨3由风力(或水力)驱动时驱动电动机2以对电池40充电的配置。
离合器系统可包括摩擦型或爪形离合器。
动力系包括中间轴A2。如附图中可见,中间轴A2设置在输出轴1与螺旋桨轴A3之间。此外,中间轴A2容纳在转子202中。
在图1至5的实施例中,轴A2可经由离合器E23刚性地旋转连接(联接)至螺旋桨轴A3。在图6所示和下文描述的可替代实施例中,轴A2对应于所述螺旋桨轴A3的一部分。
离合器系统包括离合器E123,其在接合状态下将热机1的旋转传递到中间轴A2。在离合器E123的脱离接合状态下,热动力系1的旋转不再被传递至中间轴A2。离合器E123位于热机的输出轴A1和中间轴A2之间。
离合器系统还包括离合器E324,其在接合状态下将电动机2的旋转,特别是从转子202传递到螺旋桨3。在离合器E324的脱离接合状态下,转子202不再旋转地联接到螺旋桨3或联接到螺旋桨轴A3(特别是当离合器E14和/或E23脱离接合时)。
离合器系统包括离合器E23,其在接合状态下能够优选地利用减速器系统将中间轴A2的旋转传递至螺旋桨轴A3。
离合器E23使得能够将中间轴A2的旋转传递到螺旋桨轴A3,该旋转源于离合器E123的接合状态下输出轴A1的旋转,和/或源于离合器E14的接合状态下转子202的旋转。
离合器的脱离接合能够中断相应运动的传递。
在图1至5所示的示例中,离合器系统包括离合器E14,在第一离合器E123的接合状态下,该离合器的第一部分被约束成与热机1的输出轴A1一起旋转。离合器E14的所述第一部分安装成被约束成与中间轴A2的一部分一起旋转。离合器E14的第二部分安装成被约束成与电动机2的转子202一起旋转。
在图1至5所示的示例中,离合器E324具有经由齿轮S3、S223、C213的机械传动系统(旋转)联接至电动机2的转子202的部分,离合器E324的另一部分被约束成与螺旋桨3(或螺旋桨轴)一起旋转。特别地,所述另一部分安装成由螺旋桨3的旋转器的基部(也称为螺旋桨板)约束。因此,离合器E324使得能够将电动机2的转子202的旋转传递到螺旋桨3(或者再次传递到刚性连接到螺旋桨的螺旋桨轴A3)。
在接合位置,当螺旋桨3由其所经受的外部流驱动时(风力驱动或水力驱动效应),离合器E324使得电动机2能够由螺旋桨3驱动。
机械传动系统S3、S223、C213是齿轮传动系统。传动系统优选地是行星轮系类型。行星轮系包括对应于电动机2的转子202的一部分的被称为太阳轮的内轴S3、由定子201的中空主体的内部承载的环形齿轮C213(在下文中描述)以及设置在太阳轮S3和环形齿轮C213之间的行星轮S223。行星轮S223刚性地连接到与螺旋桨轴A3同轴的行星架。与行星轮S223相对的行星架的端部被安装成受约束而与离合器E324的一部分一起旋转。
离合器E23包括通过齿轮机械传动系统S2、S23、C223(旋转)联接到中间轴A2的部分和被约束成与螺旋桨轴A3一起旋转的另一部分。
在图1至5所示的示例中,机械传动系统S2、S23、C223是齿轮传动系统。传动系统优选地是行星轮系类型。行星轮系包括对应于中间轴2的一部分的被称为太阳轮的内轴S2,以及由转子的中空主体的内部承载的环形齿轮C223。行星轮S23设置在太阳轮S2和环形齿轮C223之间。行星轮S23刚性地连接到与中间轴A2和螺旋桨轴A3同轴的行星架。行星架的与行星轮S23相对的端部被约束成与离合器E23的一部分一起旋转。
在图1至5所示的实施例中,电动机2包括定子201和转子202。定子201具有在其内表面上设置有绕组21的中空主体。在图1至5所示的示例中,定子201是壳体190的一部分。
转子202具有在定子201内部绕中间轴A2的(纵向)轴线旋转的主体。根据离合器系统的构造,转子能够相对于所述中间轴围绕中间轴A2转动,或者能够与所述中间轴A2一起围绕中间轴A2的(纵向)轴线转动。转子202有利地在其外周面上设置有磁体22。
通过发动机1的输出轴A1或通过电动机2的转子202的旋转,驱动中间轴A2旋转,能够驱动行星轮S23旋转,从而驱动连接到离合器E23的行星架旋转。闭合离合器E23使得旋转能够被传递到螺旋桨轴A3以驱动螺旋桨3旋转。
因此,中间轴A2的旋转可通过闭合离合器E23传递到螺旋桨轴A3,并因此传递到螺旋桨3。
此外,闭合离合器E324使得能够在电动机2的转子202和螺旋桨3之间传递旋转运动。
根据一个特定方面,离合器E123、E14、E23、E324的系统还被配置成具有如下构造,其中,由风力驱动或水力驱动效应旋转的螺旋桨3将其旋转运动传递到电动机2,以产生用于对电池40充电的电流。
根据一个特定方面,当离合器E324、E14中的一个接合时,离合器E14、E324中的另一个脱离接合。
安装成被约束成与轴一起旋转的离合器的一个或每个部件可以安装成在所述轴上滑动,例如通过花键,以从接合位置移动到脱离接合位置,反之亦然。
下文描述的动力系通过调整离合器的配置,可以使用不同方法来控制飞行器。
在图2A、2B、2C、3A、4A、5A所示的示例中,为了简单起见,离合器被示出为脱离接合。然而,下文的描述根据所使用的控制方法具体说明了每个所述离合器的实际的脱离接合或接合的配置。此外,添加了箭头(不同于附图标记箭头)以象征活动的运动传动系统,并且在适当的情况下,象征由电力供应系统传送或接收的电流。
为了在起飞和/或爬升阶段期间优化飞行器的使用,动力系使得能够实现飞行器的电力推进。
在图2和2A所示的示例中,离合器被带至以下配置。离合器E123脱离接合,以使热机1与螺旋桨3脱开。离合器E14和离合器E23优选地脱离接合。离合器E324接合以将电动机2的运动传递到螺旋桨3。箭头示出了由电池40供电的电动机2的转子202的旋转运动经由离合器E324传递到螺旋桨3。
假定在电传动系统中发生故障,则动力系使得能够使用热推进而不使用电推进。
因此,在图2B所示的示例中,离合器可以被带至离合器E123和离合器E23接合以将热机1的运动传递到螺旋桨3的配置。热机1的运动经由轴A1、A2和A3传递到螺旋桨3。根据图2B的实施例中所示的特定方面,离合器E14和离合器E324脱离接合,以防止电动机2的转子202转动。箭头示出了热机1经由离合器E123和E23将其旋转运动传递至螺旋桨3。
故障例如可能由电池过热或电传动系统的部件故障引起。结果,电动机的转子不再转动。
如上所述,在电传动系统中发生故障的情况下,作为安全措施,E324以及优选地E14可脱离接合,以降低由于转子202单向或另一方向的旋转所导致的任何其他电问题的风险。
故障可以根据以下标准来检测,所述标准可以可选地以任何技术上可能的组合来采用:
相对于阈值降低的电功率,
降低的旋转速度,
减小的飞行路径斜率,
降低的飞行器的前进速度,
电流的异常增加。
当仅使用电推进时,如果检测到电故障,则因此可以切换到热推进模式以缓解电传动系统中的故障。
离合器的这种配置使得能够仅通过热机驱动螺旋桨,也就是说没有来自电动机的补充,离合器的这种配置也可以在正常起飞期间使用,以保持电池中的电荷,或者如果电池放完电的话。
如果电池被认为充分充电并且其电荷将被保持,则离合器的这种配置也可以用于飞行器的水平飞行。
动力系还能够将由热机提供的旋转运动和由电动机提供的旋转运动结合起来以驱动螺旋桨。
因此,例如,如果起飞跑道较短,为了受益于所谓的高功率模式,也就是说,为了通过热机1和电动机2的累积使用来推进,离合器可以被带到图2C所示的以下配置。离合器E123接合,离合器E14脱离接合,离合器E23接合以将热机1的运动传递到螺旋桨3,离合器E324接合以将电动机2的运动传递到螺旋桨3。箭头示出热机将其旋转运动经由离合器E123和E23传递到螺旋桨,而由电池40提供电流的电动机2的转子202的旋转运动经由离合器E324传递到螺旋桨。
动力系还能够在螺旋桨3继续被驱动旋转的同时通过热机1对电池40充电。因此,例如对于如图3和3A所示的飞机的飞行中充电,离合器可以被带到以下配置。离合器E324脱离接合。离合器E123、离合器E14和离合器E23接合。因此,如箭头所示,热机1驱动中间轴A2,这导致转子202转动,该转子设有面向定子201的绕组21的磁体22,因此在绕组21中产生电流,同时还驱动螺旋桨A3。电力管理系统41、42控制由转子202的旋转产生的电流,以对电池40充电。
动力系的这种操作模式使得能够使用来自热机1的过剩功率来在飞行中对电池40充电,特别是当电池在滑行、起飞和/或爬升阶段中用于电力推进时。
动力系能够通过风力或水力驱动效应回收能量。因此,特别是在飞行器下降期间,由于螺旋桨3所处的气流的作用,使螺旋桨转动,如图4和4A所示,离合器可以被带到以下配置。离合器E123和离合器E14脱离接合,以将螺旋桨3与热机1脱离联接,并将转子202与热机1脱离联接。离合器E23优选地脱离接合。离合器E324接合。因此,箭头示出了螺旋桨3的运动经由行星轮S223和太阳轮S3传递到电动机2的转子202,并且以这种方式产生的电流用于对电池40充电。
动力系使得能够通过热机1对电池40充电而不驱动螺旋桨3。因此,例如为了对地面上的飞行器充电,并且如图5和5A所示,离合器可以被带到以下配置。离合器E324和离合器E23脱离接合。离合器E123和离合器E14接合。如图5A中的箭头所示,热机1驱动中间轴A2,以使转子202转动,该转子设置有面向定子201的绕组21的磁体22,从而产生由电力管理系统41、42控制的电流以对电池40充电。
根据一个特定实施例,飞行器包括轮子,轮子设置有经由电力管理系统41、42连接到飞行器的供电电池40的电动力系。在这种情况下,动力系使得能够通过电池40向轮子的电动力系供电。
用于管理轮子的电动力系的系统可以是也用于管理向飞行器的电动机的供电的系统,或者是设置在电池和轮子的电动力系之间的独立管理系统。
热机1可以被关闭或者可以空转等待使用。特别是如果热机被开启,则离合器E23和E324中的每一个都脱离接合以不驱动螺旋桨。
不驱动螺旋桨提高了飞行器滑行时设备和周围人员的安全性,同时防止了由于使螺旋桨旋转而造成的电池的无用能量消耗。
在图6的实施例中,动力系包括在所述热机1和中间轴A2之间的离合器E123,例如摩擦离合器。
在图6的该示例中,螺旋桨轴A3刚性地连接到中间轴A2。
离合器E123的一部分旋转地联接到热机1的输出轴A1,离合器E123的另一部分旋转地联接到中间轴A2的一部分。
中间轴A2为彼此轴向偏移的两个部分。中间轴A2的两个部分通过滑轮和带传动装置T12互连。
电动力系可以包括相对于螺旋桨轴A3轴向偏移的一个或多个电动机2。同样可以在每个电动机输出轴上设置具有锥齿轮系统和爪形离合器或离合器系统的“径向”偏移。
每个电动机2连接到电力供应系统4。特别地,为每个电动机2提供控制器42。
每个电动机2的输出轴被约束成与离合器E324'的一部分一起旋转,离合器E324优选地为爪形离合器类型。离合器E324'的另一部分被约束成与传动系统T23一起旋转,例如具有滑轮和带的传动系统,适于将电动力系的旋转运动传递到螺旋桨轴A3。
每个离合器E324'使得相关联的电动机2能够从传动系统T23脱离联接,特别是在所述电动机或每个所述电动机故障的情况下。
因此,在图6所示的实施例中,每个电动机2设置有独立的摩擦或爪形离合器系统E324',其功能上类似于图1至5的实施例中的离合器E324。
图6中仅示意性地示出了两个电动机,但是仍然存在第三电动机,并且第三电动机通过摩擦离合器或爪形离合器(例如与离合器E324'相同的类型)以与其他电动机类似的方式连接到传动系统T23。电动力系优选地包括三个或更多个电动机。
在图1至图5所示的示例中,动力系的轴是同轴的,并且轴的运动通过也是同轴的离合器传递。根据图6的变型实施例,轴A1和A3轴向偏移。
因此清楚的是,螺旋桨轴A3可在该离合器或每个离合器E234'的接合状态下由电动力系驱动和/或在离合器E123的接合状态下由热机驱动。
离合器系统可以由手动或自动控制装置控制以从一种配置进入另一种配置。特别地,诸如计算机的控制单元可以控制用于致动离合器的系统以命令从一个配置转换到另一个配置。控制单元可以采取处理器和数据存储器的形式,在所述数据存储器中存储了可以由所述处理器执行的计算机指令,或者控制单元可以采取微控制器的形式。
换句话说,所描述的功能和步骤可以通过软件或硬件(例如,可编程门阵列)来执行。特别地,由控制单元执行的功能和步骤可以通过在处理器或控制器中实现的或者由FPGA或ASIC类型部件的专用电子部件产生的指令集或软件模块来实现。也可以将软件和电子器件结合。
如果飞行器是具有轮子的飞机,同样可以提供一个或多个轮子,轮子中具有电动机,例如结合在轮毂中。每个轮子的电动机可以连接到飞行器的电力管理系统。因此,对于滑行阶段,轮子的一个或多个电动机可以借助于电力供应系统4由电池40供电。
飞行器可包括可彼此独立地控制的多个辅助螺旋桨推进系统。
根据一个特定方面,飞行器可包括两个辅助(优选地侧向)螺旋桨发动机以及在两个螺旋桨发动机之间的根据本发明的动力系的螺旋桨推进系统。这些辅助动力系和动力系可以是推或拉式的。
所述螺旋桨或每个螺旋桨可以是可变桨距的,并且以所谓的顺桨结构放置,以在不使用时减小阻力。
本发明并不限于附图中所示的实施例。
此外,术语“包括”不排除其他元件或步骤。此外,参照上文解释的实施例之一描述的特征或步骤可以同样地与上文解释的其他实施例的其他特征或步骤组合使用。
- 包括混合动力系统的机器和相应的控制方法
- 包括混合动力系的机器和相应的控制方法