具备防止冲突以及回收功能的无人机
文献发布时间:2023-06-19 11:14:36
技术领域
本发明涉及一种无人机,更为详细地,涉及一种具备防止冲突以及回收功能的无人机,其可与远程控制信号无关地,在飞行中防止与障碍物的冲突,向无人机输出特定信号,从而可安全地回收无人机。
背景技术
无人机是配备多个翼,且通过远程控制装置操纵的无人飞行体。可小型化且轻量化,被开发并用于多种用途,例如监测或拍摄人难以接近的场所或作业环境等。最近,被广泛普及用于个人爱好的同时,其需求也持续地增加。
诸如这样的无人机的无人飞行体根据通过远程操纵器的无线控制进行飞行,或沿着自身编程的路径进行飞行。但是,由于在多种环境和地形中进行飞行,因此在使用者调整不熟练或通信障碍、或控制无人机的中央控制装置产生异常的情况,可能会产生与周边建筑物或障碍物冲突的事故。此外,如果脱离远程控制的范围,则由于各种障碍物,在控制方面有困难,因此无法飞行,也会产生由于和多种障碍物的冲突造成的无法预期的伤害的情况,因此不仅产生安全上的问题,也会产生财产上的损失。
韩国登记专利第10-1585650号(登记日:2016.01.08)
韩国公开专利第10-2017-0059853号(公开日:2017.05.31)
韩国登记专利第10-1895343号(登记日:2018.08.30)
发明内容
本发明用于解决所述的问题。本发明的目的在于提供一种无人机,其与使用者的远程控制信号和中央控制装置无关地,可自身感知障碍物并防止冲突。
此外,本发明的目的在于提供一种无人机,在脱离飞行范围或产生控制上的问题的情况,发送特定信号,从而可安全地回收无人机。
根据本发明的无人机包括本体、多个翼、多个驱动马达、电源供给部、控制部、多个传感器和多个开关部,开关部以可使得向驱动马达供给的电源打开和关闭的形式连接,以便防止本体与障碍物冲突,其中,驱动马达使得与传感器对应的翼驱动。翼安装于本体。驱动马达与各个翼对应,以便可使得翼旋转。电源供给部向驱动马达供给电源。为了控制本体的飞行,控制部对从电源供给部向驱动马达供给的电源进行控制。传感器以与翼对应的形式设置,以便通过检测信号而感知接近翼的障碍物。开关部接收传感器感知到的信号,从而使得从电源供给部向驱动马达直接供给的电源打开和关闭,为了能够增加驱动马达的功率,从电源供给部向驱动马达直接供给电源。
此外,就所述无人机而言,优选地,如果与互相对称的翼对应的传感器感知到的信号值的差异大于设定值,则打开开关部,以便使得驱动马达的功率增加。
此外,就所述无人机而言,优选地,还包括输出部,优选地,传感器以仅接收从本体的外部发出的信号的形式安装于本体。为了将感知障碍物的信号输出,输出部安装于本体。
此外,就所述无人机而言,优选地,开关部进一步连接,以便可使得向驱动马达供给的电源打开和关闭,驱动马达使得与对应于传感器的翼对称的翼驱动,如果感知到与输出部输出的信号相比大于一定大小的信号,则以使得对称的翼驱动的形式打开。
此外,就所述无人机而言,优选地,电源供给部包括第一电源供给部和第二电源供给部。第一电源供给部通过控制部向驱动马达供给电源。第二电源供给部通过开关部向驱动马达直接供给电源。
根据本发明,如果传感器感知到障碍物,则在电源供给部向使得与传感器对应的翼驱动的驱动马达直接供给电源,并增加驱动马达的功率。因此,与控制无人机的控制部无关地,可防止无人机的冲突。
此外,根据本发明,如果与互相对称的翼对应的传感器感知到的信号值的差异大于设定值,则打开开关部,以便使得驱动马达的功率增加。因此,可以防止无人机的飞行方向因从外部来的妨碍信号被转换。
此外,根据本发明,开关部进一步连接,以便可使得向驱动马达供给的电源打开和关闭,驱动马达使得与对应于传感器的翼对称的翼驱动,如果感知到与输出部输出的信号相比大于一定大小的信号,则以使得对称的翼驱动的形式打开。此时,在脱离飞行范围或产生控制上的问题的情况,向无人机发送特定信号,从而可安全地回收无人机。
附图说明
图1是根据本发明的具备防止冲突功能的无人机的一个实施例的概念图。
图2是表示图1所示的无人机的一个实施例的构成的块图。
图3是根据本发明的具备防止冲突功能的无人机的另一个实施例的概念图。
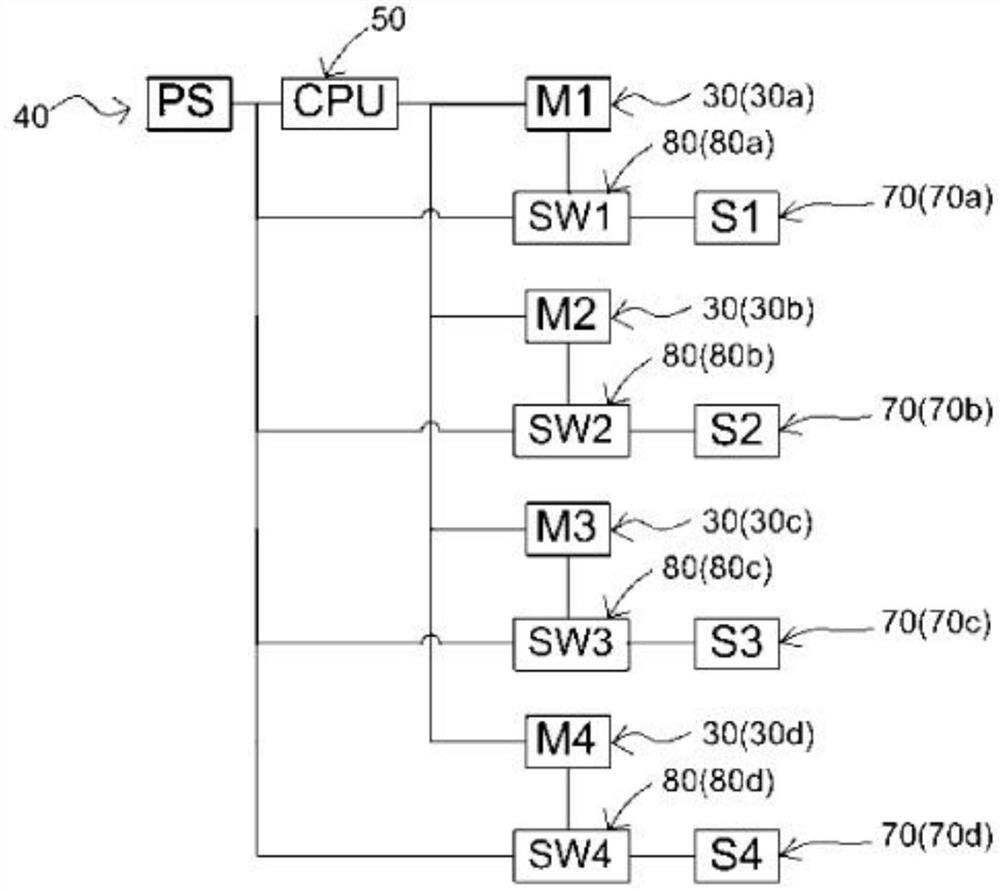
图4是表示图3所示的无人机的实施例的构成的块图。
图5是根据本发明的具备防止冲突功能的无人机的又另一个实施例的概念图。
图6是表示图5所示的无人机的实施例的构成的块图。
标号说明
1:无人机 10:本体
20(20a、20b、20c、20d):翼 30(30a、30b、30c、30d):驱动马达
40:电源供给部 41:第一电源供给部
43:第二电源供给部 50:控制部
60:输出部 70(70a、70b、70c、70d):传感器
80(80a、80b、80c、80d):开关部。
具体实施方式
参照图1及图2,对根据本发明的具备防止冲突以及回收功能的无人机的一个实施例进行说明。
根据本发明的具备防止冲突以及回收功能的无人机1包括本体10、翼20、驱动马达30、电源供给部40、控制部50、输出部60、传感器70和开关部80。
翼20在本体10安装有多个。本实施例中,翼20沿本体10的前、后、左、右方向安装有4个。
多个驱动马达30以与各个翼20对应的形式安装于本体10,以便可使得翼20旋转。本实施例中,驱动马达30以与翼20对应的形式安装有4个。
电源供给部40起到向驱动马达30供给电源的作用。
控制部50对从电源供给部40向驱动马达30供给的电源进行控制,从而控制本体10的飞行。
输出部60起到输出感知障碍物的信号f
传感器70起到通过检测信号值而感知接近翼20的障碍物的作用。为此,传感器70朝向无人机1的外部安装于本体10,以便仅能感知从无人机1的外部输出的信号,无法感知到安装于本体10的输出部60输出的信号。并且,传感器70与翼20对应并设置有多个。此时,传感器70设置为以1:1或N:M等形式对应于翼20,仅可设置一个传感器70。本实施例中,传感器70以与翼20对应的形式安装有4个。
开关部80的作用在于,接收传感器70感知到的信号,从而使得从电源供给部40向驱动马达30直接供给的电源打开和关闭,为了能够增加驱动马达30的功率,从电源供给部40向驱动马达30直接供给电源,为此,其在本体10安装有多个。此时,开关部80可以使得向驱动马达30供给的电源打开和关闭的形式连接,驱动马达30使得与传感器70对应的翼20驱动,以便防止本体10与障碍物冲突。在此,在安装一个传感器70的情况,开关部80根据传感器70感知到的信号的强度而打开和关闭。
本实施例的情况,无人机1飞行的同时,输出部60输出感知障碍物的信号f
图3及图4是根据本发明的具备防止冲突以及回收功能的无人机的另一个实施例。参照图3及图4,对根据本发明的无人机的另一个实施例进行说明。
图1及图2的实施例的情况,如果为了捕获无人机1而人为地从外部向无人机1发射强力的信号,则安装于无人机1的传感器70感知到信号。那么,使得与感知到的传感器70对应的开关部80打开(ON),从而从电源供给部40向驱动马达30供给电源。此时,无人机1的问题在于,根据从外部发射的信号操纵无人机1。图3及图4的实施例是为了防止这样的情况。
为此,图3所示的实施例的情况,电源供给部40包括第一电源供给部41和第二电源供给部43,第一电源供给部41通过控制部50向驱动马达30供给电源,第二电源供给部43通过开关部80向驱动马达30直接供给电源。并且,如果与互相对称的翼20a-20b、20c-20d对应的传感器70a-70b、70c-70d感知到的信号值的差异大于设定值,则打开开关部80,以便使得驱动马达30的功率增加。因此,仅在互相对称的两个传感器70a、70b感知到的信号值的差异大于设定值的情况时,增加驱动马达30的功率并转换本体10的飞行方向。此时,从远距离人为地向无人机1发射信号的情况,互相对称的两个传感器70a、70b感知到的信号值的差异不大。因此,无人机1不根据外部的人为的信号运转开关部80a。但是,感知近距离的障碍物的情况,由于位于障碍物方向的传感器70a和与其对应的传感器70b感知到的信号值的差异大,因此可以运转开关部80a。剩下的构成要素与图1所示的实施例相同,因此省略其详细的说明。
本实施例的情况,在无人机1的飞行中,如果与位于C方向的翼20c对应的传感器70c感知到障碍物,则开关部80检测传感器70d感知到的信号值,传感器70d与和C方向的翼20c对称的D方向的翼20d相对应。在此,在C方向存在障碍物的情况,如果从输出部60输出并被障碍物反射的信号f
另外,如图4所示,如果在A方向是从远距离输出的回收信号,而不是障碍物的情况,因为是从远距离输出,所以A方向的传感器70a和B方向的传感器70b感知到的信号值的差异较小。感知到的信号值的差小于设定值的情况,开关部80a从第二电源供给部43向B方向的驱动马达30b供给电源,从而可使得无人机1向A方向飞行。
图5及图6是根据本发明的具备防止冲突以及回收功能的无人机的又另一个实施例。参照图5及图6,对根据本发明的无人机的又另一个实施例进行说明。
图5及图6的实施例是为了在无人机1脱离远程控制的范围或产生控制上的问题的情况时回收无人机1。为此,图5所示的实施例的情况,开关部80以可使得向驱动马达30a和驱动马达30b供给的电源打开和关闭的形式连接,驱动马达30a驱动与传感器70a对应的翼20a,驱动马达30b驱动与对应于传感器70a的翼20a对称的翼20b。此时,如果传感器70感知到从输出部60输出的信号f
本实施例的情况,与图1及图2的实施例相同地,在无人机1的飞行中,如果与位于B方向的翼20b对应的传感器70b感知到障碍物,则开关部80b使得从电源供给部40向驱动B方向的翼20b的驱动马达30b供给的电源打开(ON)。那么,增加使得B方向的翼驱动的驱动马达30b的功率,从而增加翼20b的旋转力。如果增加B方向的翼20b的旋转力,则无人机1向A方向转换飞行方向。
相反地,在无人机1脱离飞行范围或产生控制上的问题而应该回收无人机1情况,使用者向无人机1发送可以回收无人机1的特定信号f
- 具备防止冲突以及回收功能的无人机
- 一种具备反制无人机功能的特种无人机