一种防止椰子掉落的摘椰子用无人机
文献发布时间:2023-06-19 11:24:21
技术领域
本发明涉及无人机技术领域,尤其是涉及一种防止椰子掉落的摘椰子用无人机。
背景技术
由于椰树生长的特殊性,椰子无法使用大型机械采摘,基本都是靠采摘人员通过爬树工具爬上椰树来完成椰子的采摘工作。但是,人工采摘椰子的效率较低,并且耗费大量时间与人力,在椰子需求量和种植量的日益增长之下,人工采摘将无法适应整个椰子的产业发展。另一方面,人工采摘椰子的过程中还存在巨大的安全隐患,椰树的高度较高,采摘人员需要爬到椰树最顶端的位置才能采摘椰子,当采摘人员保护措施或者爬树器具出现问题时,采摘人员很可能从树上跌落,并且采摘时,需要将采摘下的椰子扔向地面,落下的椰子可能会砸到地面人员,有一定的安全隐患。
发明内容
针对现有技术的不足,本发明的目的在于提供了一种防止椰子掉落的摘椰子用无人机,以解决人工采摘椰子效率较低且存在采摘人员坠落或椰子掉落砸伤地面人员等安全隐患的问题。
实现上述目的本发明的技术方案为,一种防止椰子掉落的摘椰子用无人机。
利用本发明的技术方案制作的一种防止椰子掉落的摘椰子用无人机,包括无人机,所述无人机内设有底部与外界相通的转动腔,所述无人机底部固定安装有位于所述转动腔两侧的挡板,一侧所述挡板内固定安装有步进电机,所述步进电机上动力连接有转动驱动轴,所述转动驱动轴上固定安装有十字转盘,所述十字转盘四个脚上分别固定安装有转动块,所述转动块内设有定滑轮组件以及夹具组件,所述定滑轮组件包括靠近所述十字转盘侧与外界相通的滑轮腔,所述滑轮腔两侧端壁转动安装有滑轮转动轴,所述滑轮转动轴上固定安装有绕线定滑轮,所述夹具组件包括远离所述十字转盘侧与外界相通且与所述滑轮腔相通的夹具腔,所述夹具腔内滑动设有与所述绕线定滑轮通过连接线连接的升降箱。
所述挡板底部设有支撑脚,所述无人机顶部设有四组螺旋桨,所述无人机底部还固定安装有摄影机。
所述定滑轮组件还包括与所述滑轮转动轴固定连接的从动齿轮,所述挡板另一侧端壁转动安装有两个升降转动轴,所述升降转动轴上固定安装有能与所述从动齿轮啮合的主动齿轮,两个所述升降转动轴通过一组交叉皮带轮传动连接,所述挡板内固定安装有与一侧所述升降转动轴动力连接的升降电机。
所述夹具组件还包括一侧位于所述升降箱内的一侧与外界相通的夹具槽,所述夹具槽内对称转动安装有两个夹具转动轴,所述夹具转动轴上固定安装有内侧含尖齿的夹块,所述夹块内侧固定安装有夹具扇形齿。
所述夹具组件还包括与所述夹具槽连通的伸缩槽,所述伸缩槽内滑动设有与所述伸缩槽通过伸缩弹簧连接的伸缩块,所述伸缩槽内侧固定安装有电磁铁,所述伸缩块内侧固定安装有能与所述电磁铁配合的铁块,所述伸缩块两侧对称固定安装有与所述夹具扇形齿啮合的夹具齿条。
所述无人机一侧设有切割组件,所述切割组件包括位于所述无人机一侧的电动滑轨,所述电动滑轨内滑动设有电动滑块,所述电动滑块内固定安装有切割电机,所述切割电机上动力连接有电动推杆,所述电动推杆另一侧固定安装有圆形切割刀。
采用了上述技术方案,本发明具有以下的有益效果:
本方案当中,采摘人员通过摄像头确定椰子位置,控制无人机靠近椰子,夹具夹住椰子,切割组件伸出切割果蒂,十字转盘转动九十度,绕线轮放线带动位于底部的升降箱下降,将椰子向下放落,防止椰子坠落砸伤地面人员,同时远离椰子一侧的绕线轮绕线带动升降箱上升复位,不需要采摘人员爬树,防止采摘人员由于保护措施或者爬树器具出现问题坠落,采摘效率高。
附图说明
为了更清楚地说明发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
图1是本发明所述一种防止椰子掉落的摘椰子用无人机的结构示意图;
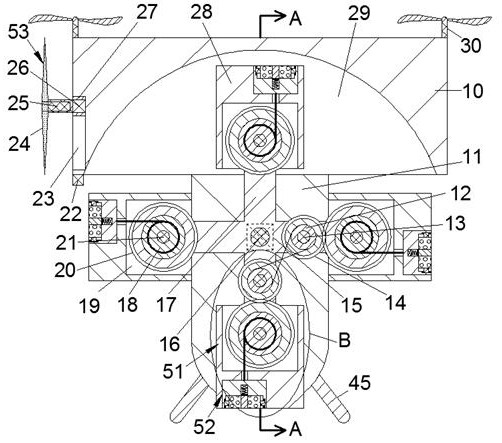
图2是本发明图1中A-A的结构示意图;
图3是本发明图1中B处的结构放大示意图;
图4是本发明图2中C处的结构放大示意图;
图5是本发明所述一种防止椰子掉落的摘椰子用无人机的三维结构示意图。
具体实施方式
下面结合附图和实施例,对本发明进一步详细说明。其中相同的零部件用相同的附图标记表示。需要说明的是,下面描述中使用的词语“前”、“后”、“左”、“右”、“上”和“下”指的是附图中的方向,词语“底部”和“顶部”、“内”和“外”分别指的是朝向或远离特定部件几何中心的方向。
如图1至5所示,一种防止椰子掉落的摘椰子用无人机,包括无人机10,所述无人机10内设有底部与外界相通的转动腔29,所述无人机10底部固定安装有位于所述转动腔29两侧的挡板11,一侧所述挡板11内固定安装有步进电机15,所述步进电机15上动力连接有转动驱动轴16,所述转动驱动轴16上固定安装有十字转盘17,所述十字转盘17四个脚上分别固定安装有转动块28,所述转动块28内设有将椰子逐渐放落至地面的定滑轮组件51以及夹取椰子的夹具组件52,所述定滑轮组件51包括靠近所述十字转盘17侧与外界相通的滑轮腔19,所述滑轮腔19两侧端壁转动安装有滑轮转动轴21,所述滑轮转动轴21上固定安装有绕线定滑轮18,所述夹具组件52包括远离所述十字转盘17侧与外界相通且与所述滑轮腔19相通的夹具腔35,所述夹具腔35内滑动设有与所述绕线定滑轮18通过连接线33连接的升降箱32,所述绕线定滑轮18转动放线时所述升降箱32下降逐渐将椰子放落至地面,所述绕线定滑轮18转动绕线时将所述升降箱32向上拉起复位至所述夹具腔35内。
有益地,所述挡板11底部设有支撑脚45,所述无人机10顶部设有四组螺旋桨30,所述无人机10底部还固定安装有摄影机22。
参照附图1至3所示,所述定滑轮组件51还包括与所述滑轮转动轴21固定连接的从动齿轮20,所述挡板11另一侧端壁转动安装有两个升降转动轴13,所述升降转动轴13上固定安装有能与所述从动齿轮20啮合的主动齿轮14,所述从动齿轮20位于底部与远离椰子侧时与所述主动齿轮14啮合,两个所述升降转动轴13通过一组交叉皮带轮12传动连接,所述挡板11内固定安装有与一侧所述升降转动轴13动力连接的升降电机34,启动所述升降电机34,从而带动两个所述升降转动轴13反向转动,从而带动两个所述主动齿轮14反向转动,从而带动一侧所述升降箱32下降,一侧所述升降箱32上升。
参照附图4所示,所述夹具组件52还包括一侧位于所述升降箱32内的一侧与外界相通的夹具槽46,所述夹具槽46内对称转动安装有两个夹具转动轴38,所述夹具转动轴38上固定安装有内侧含尖齿44的夹块31,所述夹块31内侧固定安装有夹具扇形齿43。
参照附图4所示,所述夹具组件52还包括与所述夹具槽46连通的伸缩槽37,所述伸缩槽37内滑动设有与所述伸缩槽37通过伸缩弹簧39连接的伸缩块41,所述伸缩槽37内侧固定安装有电磁铁36,所述伸缩块41内侧固定安装有能与所述电磁铁36配合的铁块40,所述伸缩块41两侧对称固定安装有与所述夹具扇形齿43啮合的夹具齿条42,所述电磁铁36不通电时,所述伸缩块41位于最外侧,所述夹块31处于打开状态,所述伸缩弹簧39处于正常拉伸状态,所述电磁铁36通电时吸附所述铁块40,所述伸缩块41向内滑动,所述伸缩弹簧39压缩,所述夹具齿条42与所述夹具扇形齿43啮合,从而带动所述夹块31绕所述夹具转动轴38转动,所述尖齿44夹紧椰子。
参照附图1所示,所述无人机10一侧设有切割果蒂将椰子与椰树分离的切割组件53,所述切割组件53包括位于所述无人机10一侧的电动滑轨23,所述电动滑轨23内滑动设有电动滑块27,所述电动滑块27内固定安装有切割电机26,所述切割电机26上动力连接有电动推杆25,所述电动推杆25另一侧固定安装有圆形切割刀24,当所述夹块31夹紧椰子时所述电动推杆25根据椰子大小将所述圆形切割刀24推出,所述切割电机26带动所述电动推杆25转动,从而带动所述圆形切割刀24转动,所述电动滑轨23控制所述电动滑块27下降,所述圆形切割刀24切割果蒂,切割后所述电动滑轨23控制所述电动滑块27上升复位。
工作原理:
通过摄影机22确定椰子的位置,采摘人员通过无人机10的遥控器控制无人机10飞至椰子一侧,靠近椰子侧的电磁铁36通电,吸附铁块40,伸缩块41向内滑动,伸缩弹簧39压缩,夹具齿条42与夹具扇形齿43啮合,从而带动夹块31绕夹具转动轴38转动,尖齿44夹紧椰子,电动推杆25根据椰子大小将圆形切割刀24推出,切割电机26带动电动推杆25转动,从而带动圆形切割刀24转动,电动滑轨23控制电动滑块27下降,圆形切割刀24切割果蒂,切割后电动滑轨23控制电动滑块27上升复位;步进电机15驱动转动驱动轴16转动九十度,从而带动十字转盘17转动九十度,从而带动转动块28绕转动驱动轴16转动九十度,夹有椰子的转动块28转动至底部,从动齿轮20与一侧主动齿轮14啮合,远离椰子侧的从动齿轮20与另一个主动齿轮14啮合,启动升降电机34,从而带动两个交叉皮带轮12、升降转动轴13反向转动,从而带动两个主动齿轮14反向转动,从而带动两个从动齿轮20反向转动,从而带动两个滑轮转动轴21反向转动,从而带动两个绕线定滑轮18反向转动,绕线定滑轮18转动放线时,升降箱32下降逐渐将椰子放落至地面,电磁铁36断电,伸缩块41由于伸缩弹簧39作用向外侧滑动,夹块31绕夹具转动轴38转动打开松开椰子,绕线定滑轮18转动绕线时,将升降箱32向上拉起复位至夹具腔35内复位,同时控制无人机10飞至另一个椰子一侧摘椰子。
上述技术方案仅体现了本发明技术方案的优选技术方案,本技术领域的技术人员对其中某些部分所可能做出的一些变动均体现了本发明的原理,属于本发明的保护范围之内。
- 一种防止椰子掉落的摘椰子用无人机
- 一种广告宣传用可防止悬挂广告掉落的无人机