一种垂直起降无人机动力部分结构及工作方法
文献发布时间:2023-06-19 11:24:21
技术领域
本发明涉及无人机领域,具体地,涉及一种垂直起降无人机动力部分结构及工作方法。
背景技术
现有的固定翼无人机无法垂起起降和悬停,在起飞和降落时需要较长的跑道,对起降环境要求较高,同时无法像多旋翼无人机一样在空中悬停。而多旋翼无人机虽然可以垂直起降,但无法进行长时间飞行和高速飞行。
公开号CN110382356A公布一种无人机的动力组件和无人机,其中,动力组件包括:螺旋桨,与螺旋桨固定连接、用于驱动螺旋桨转动的电机;与电机电连接、用于控制电机转动的电调组件;电调组件与电机呈上下排布设置,并且螺旋桨位于电调组件和电机的上方。
发明内容
针对现有技术中的缺陷,本发明的目的是提供一种垂直起降无人机动力部分结构及工作方法。
根据本发明提供的一种垂直起降无人机动力部分结构,包括:螺旋桨、机翼、直流无刷电机、电机倾转底座、伺服电机驱动齿轮、电机底座驱动齿轮和伺服电机;
所述螺旋桨连接所述直流无刷电机上端,所述直流无刷电机下端连接所述电机倾转底座上端,所述电机倾转底座下端连接所述电机底座驱动齿轮,所述机翼侧面安装所述伺服电机,所述伺服电机连接所述伺服电机驱动齿轮,所述伺服电机驱动齿轮与所述电机底座驱动齿轮啮合。
优选地,所述伺服电机采用直流无刷伺服电机。
优选地,所述伺服电机连接FOC矢量控制器。
优选地,所述伺服电机驱动齿轮与所述电机底座驱动齿轮齿轮比为1:2。
优选地,所述机翼采用流线型设计。
优选地,所述直流无刷电机通过四颗M3平头螺丝与所述电机倾转底座相连。
优选地,所述螺旋桨通过螺旋桨固定螺丝与所述直流无刷电机连接。
优选地,所述电机倾转底座上端设置为水平杆,所述水平杆中间设置为圆形台面,所述圆形台面上表面连接所述直流无刷电机下端。
优选地,所述水平杆两端垂直向下延伸出两根垂直杆,所述垂直杆下端内侧连接所述电机底座驱动齿轮。
本发明还提供一种垂直起降无人机动力部分工作方法,包括以下步骤:
步骤一,当所述无人机起飞时,所述FOC矢量控制器驱动所述伺服电机工作,所述伺服电机驱动所述伺服电机驱动齿轮,所述伺服电机驱动齿轮驱动所述电机底座驱动齿轮转动,所述电机底座驱动齿轮驱动所述电机倾转底座倾转,所述电机倾转底座带动所述螺旋桨倾转,使得所述螺旋桨倾转成与地面成水平状态,所述螺旋桨开始旋转,所述螺旋桨达到一定转速时无人机开始起飞。
步骤二:当所述无人机完成垂起起飞,开始高速飞行使时,所述FOC矢量控制器驱动所述伺服电机工作,所述伺服电机驱动所述伺服电机驱动齿轮,所述伺服电机驱动齿轮驱动所述电机底座驱动齿轮转动,所述电机底座驱动齿轮驱动所述电机倾转底座倾转,所述电机倾转底座带动所述螺旋桨倾转,使得所述螺旋桨倾转成与地面成垂直状态,无人机获得向前的推力,所述无人机的升力由所述机翼上下表面的压力差提供。
步骤三:当所述无人机降落时,所述FOC矢量控制器驱动所述伺服电机工作,所述伺服电机驱动所述伺服电机驱动齿轮,所述伺服电机驱动齿轮驱动所述电机底座驱动齿轮转动,所述电机底座驱动齿轮驱动所述电机倾转底座倾转,所述电机倾转底座带动所述螺旋桨倾转,使得所述螺旋桨倾转成与地面成水平状态,所述螺旋桨降低转速,所述无人机下降,当无人机完成降落后,所述螺旋桨停止转动。
与现有技术相比,本发明具有如下的有益效果:
1、通过采用直流无刷伺服电机,从而可以提高启动转矩和加快响应速度,使力矩更加稳定地输出。
2、通过采用1:2齿轮组进行传动,从而可以提高转动力矩,增加控制精度。
3、通过采用FOC矢量控制器驱动伺服电机,从而可以使得电机的运动转矩平稳、噪声小,并且具有高速的动态响应。
附图说明
通过阅读参照以下附图对非限制性实施例所作的详细描述,本发明的其它特征、目的和优点将会变得更明显:
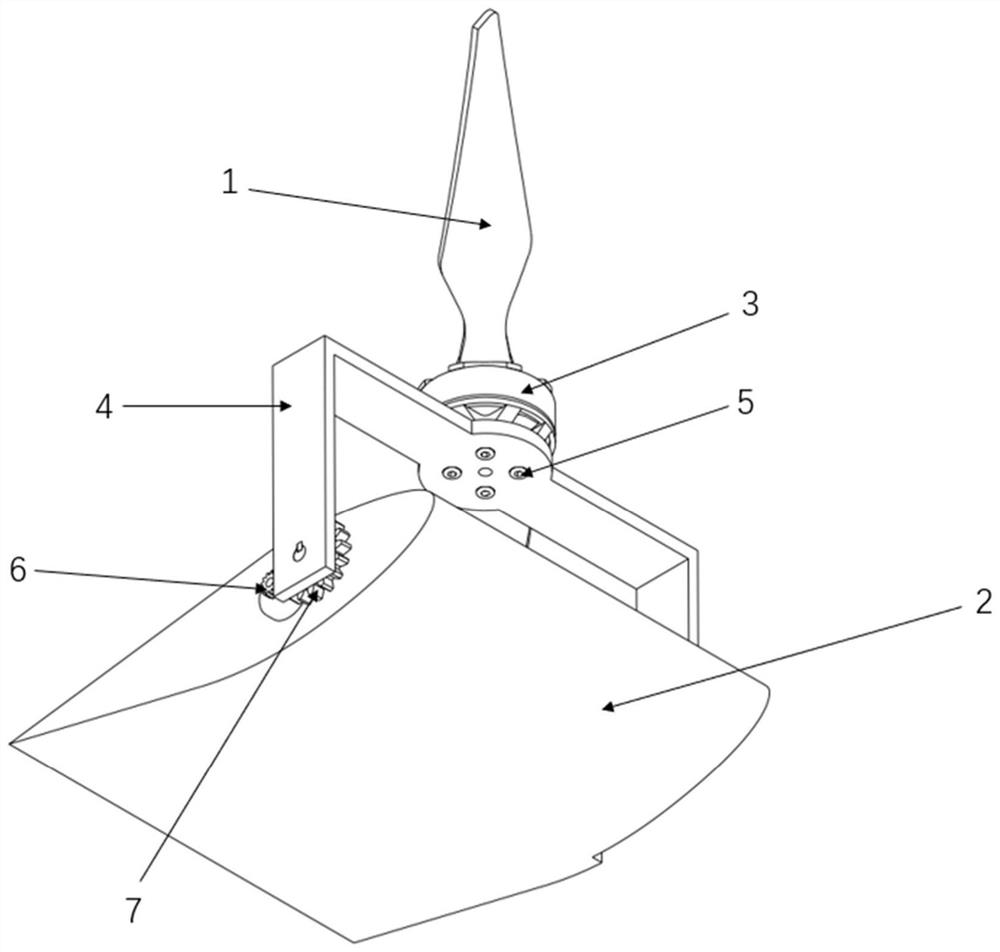
图1为一种垂直起降无人机动力部分结构的立体示意图(一);
图2为一种垂直起降无人机动力部分结构主视图;
图3为一种垂直起降无人机动力部分结构的立体示意图(二)。
具体实施方式
下面结合具体实施例对本发明进行详细说明。以下实施例将有助于本领域的技术人员进一步理解本发明,但不以任何形式限制本发明。应当指出的是,对本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变化和改进。这些都属于本发明的保护范围。
如图1、图2所示,一种垂直起降无人机动力部分结构,包括:螺旋桨1、机翼2、直流无刷电机3、电机倾转底座4、伺服电机驱动齿轮6、电机底座驱动齿轮7和伺服电机10;螺旋桨1连接直流无刷电机3上端,直流无刷电机3下端连接电机倾转底座4上端,电机倾转底座4下端连接电机底座驱动齿轮7,机翼2侧面安装伺服电机10,伺服电机10连接伺服电机驱动齿轮6,伺服电机驱动齿轮6与电机底座驱动齿轮7啮合。伺服电机10采用直流无刷伺服电机,伺服电机10连接FOC矢量控制器。伺服电机驱动齿轮6与电机底座驱动齿轮7齿轮比为1:2,机翼2采用流线型设计。直流无刷电机3通过四颗M3平头螺丝与电机倾转底座4相连。螺旋桨1通过螺旋桨固定螺丝8与直流无刷电机3连接。电机倾转底座4上端设置为水平杆,水平杆中间设置为圆形台面,圆形台面上表面连接直流无刷电机3下端。水平杆两端垂直向下延伸处两根垂直杆,垂直杆下端内侧连接电机底座驱动齿轮7。
如图3所示,一种垂直起降无人机动力部分工作方法,包括以下步骤:
步骤一,当无人机起飞时,FOC矢量控制器驱动伺服电机10工作,伺服电机10驱动伺服电机驱动齿轮6,伺服电机驱动齿轮6驱动电机底座驱动齿轮7转动,电机底座驱动齿轮7驱动电机倾转底座4倾转,电机倾转底座4带动螺旋桨1倾转,使得螺旋桨1倾转成与地面成水平状态,螺旋桨1开始旋转,当达到一定转速时无人机开始起飞。
步骤二:当无人机完成垂起起飞,开始高速飞行使时,FOC矢量控制器驱动伺服电机10工作,伺服电机10驱动伺服电机驱动齿轮6,伺服电机驱动齿轮6驱动电机底座驱动齿轮7转动,电机底座驱动齿轮7驱动电机倾转底座4倾转,电机倾转底座4带动螺旋桨1倾转,使得螺旋桨1倾转成与地面成垂直状态,无人机获得向前的推力,无人机的升力由机翼2上下表面的压力差提供。
步骤三:当无人机降落时,FOC矢量控制器驱动伺服电机10工作,伺服电机10驱动伺服电机驱动齿轮6,伺服电机驱动齿轮6驱动电机底座驱动齿轮7转动,电机底座驱动齿轮7驱动电机倾转底座4倾转,电机倾转底座4带动螺旋桨1倾转,使得螺旋桨1倾转成与地面成水平状态,螺旋桨1降低转速,无人机下降,当无人机完成降落后,螺旋桨1停止转动。
在本申请的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本申请和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本申请的限制。
以上对本发明的具体实施例进行了描述。需要理解的是,本发明并不局限于上述特定实施方式,本领域技术人员可以在权利要求的范围内做出各种变化或修改,这并不影响本发明的实质内容。在不冲突的情况下,本申请的实施例和实施例中的特征可以任意相互组合。
- 一种垂直起降无人机动力部分结构及工作方法
- 一种混合动力垂直起降固定翼无人机动力系统