飞行器和模块化推进单元
文献发布时间:2023-06-19 11:57:35
技术领域
本发明涉及飞行器。具体地,尽管不是排他性地,本发明涉及能够VTOL-STOL的飞行器,以及与该飞行器一起使用的模块化推进部件。
背景技术
能够竖直起降(VTOL)和短距起降(STOL)的飞行器是本领域已知的,例如贝尔波音V-22鱼鹰。然而,这种飞行器有一些缺点。其不是高效的飞行工具,运行和维护费用往往很高,而且不太适合/不能在城市区域内飞行。
在本领域中仍然需要改进的飞行器,特别是适于在城市区域内飞行的飞行器。
发明内容
在本发明的第一方面中,提供
一种飞行器,包括
翼;
牵引式推进装置(TPM);
推进式推进装置(PPM);
巡航推进装置(CPM);并且
其中,TPM能够提供一推力,该推力的方向能够可逆地从向前推进方向移动到向上推进方向;以及
其中,PPM能够提供一推力,该推力的方向能够可逆地从向前推进方向移动到向上推进方向;以及
其中,CPM能够提供推力,该推力的方向在向前推进方向上;以及
其中,TPM和PPM连接到翼,并且其中,TPM位于翼的前部,并且PPM位于翼的后部。
本发明的飞行器实际上具有三种推进装置。其具有牵引式推进装置(TPM),位于翼的前部,即用于“牵引”飞行器前进。其具有推进式推进装置,位于翼后部,即“推进”飞行器前进。它们可以协同作用,以向前的作用力向前方向推进飞行器。由TPM和PPM产生的推力可以可逆地移动(即移动走和移动回来),使得推力可以在向上的方向上定向。因此,它们可以协同作用,以向上的作用力向上(向天空)方向推进飞行器。向上的作用力抵消了重力的作用。因此,TPM和PPM可以具有双重功能,可以使飞行器升起或向前推进飞行器。然而,适合于产生必要的力以竖直提升飞行器的推进装置对于巡航飞行来说并不是很高效。例如,贝尔波音V-22鱼鹰(以下简称“鱼鹰”)飞行器需要非常大的螺旋桨叶片,以产生竖直升空所需的升力。在水平飞行中,大螺旋桨叶片的较大的总重量和阻力降低了飞行器在水平(巡航)飞行中的航程和效率。鱼鹰的噪音也很大。本发明具有使用TPM和PPM用于升空的能力,但是可以切换到巡航推进装置(CPM)用于巡航(水平)飞行。在水平飞行中,能量需求要(比升空飞行)低得多,因此可以使用更小、更节能的推进装置。因此,这种推进需要较少的燃料/能量,因此飞行器有能力飞得更远。此外,由于其较小的尺寸,CPM在运行时比典型的VTOL型推进单元安静得多。城市环境中的噪声污染是严重的问题,因此低噪声、高能效的飞行有很大的好处。
同样有利于本发明的是具有连接在翼的前部(牵引式)和后部(推进式)上的推进装置。这意味着相比于仅位于翼的前部(通常)或仅位于翼的后部的较大推进装置,可以采用更小更高效的推进单元。例如,鱼鹰在翼的前部有两个大型单螺旋桨。
允许TPM和PPM产生可从向前推进方向移动到向上推进方向的推力,可以在飞行模式中提供灵活性,并且可以在发生故障情况下提供额外的安全级别。
应当注意,牵引式类型推进装置在适当定向并以常规方式运行时产生向上的推力。例如,如果牵引式螺旋桨指向上方并正常运转,这将产生向上的推力,即向上的推进方向。然而,如果牵引式螺旋桨启用了可变航向倾角,其就可以指向下方,并且如果启用了正确的可变航向倾角,这也会产生向上的推力。同样地,如果推进式螺旋桨指向下方并正常运转,这将产生向上的推力。然而,如果推进式螺旋桨启用了可变航向倾角,其就可以指向上方,并且如果启用了正确的可变航向倾角,这也会产生向上的推力。
因此,本发明有几种方法来产生提升推力。例如,在TPM和PPM分别是牵引式和推进式螺旋桨的情况下,当牵引式指向上方而推进式指向下方时,就产生了向上的推力(例如,见图1)。如果牵引式和推进式的螺旋桨具有可变航向倾角的能力,那么当其以适当的可变航向倾角运行时,可以产生向上的推力,但在这种情况下,牵引式是向下的,而推进式是向上的。因此,在本示例中,在适当注意螺旋桨的正确航向倾角的情况下,飞行器可以以所有螺旋桨上升、所有螺旋桨下降或上-下和下-上的配置飞行。因此,这可以在设备出现故障时提高故障安全性。可能的,如果地面上有障碍物,或者是在疏散接送的情况下,或者对于货物接送,所有的螺旋桨都指向上方可能是有益的。类似地,如果所有螺旋桨都向下的飞行器飞行可能是有益的,例如,为了避开电线、树枝或鸟类,或者为了更好的视野。
此外,认为TPM和PPM的正确定向/运行可以产生净向下推力(或减小的净向上推力)。
将TPM和PPM都连接到翼还有另一个益处。使允许飞行器与推进装置通信(在能源、信息和控制方面)所需的必要基础设施大大简化。也就是说,由于TPM和PPM位于/集中在翼区域,这大大简化了飞行器整体的设计、制造和组装。燃料/能量管线、电缆、控制装置和传感器可以简单地从驾驶舱区域引导/输送到翼区域。例如,这将允许包括推进装置的翼被制造为单个(例如,单片)单元,并且随后与飞行器的其余部分组合。这种模块化结构大大节省成本和时间。也简化了维修和维护。
在一些现有技术的VTOL型飞行器中,推进装置都是相同种类的(例如,限于翼前面的冗余的牵引式螺旋桨)。这意味着要产生足够的升力,螺旋桨需要(i)非常大;或者(ii)前翼表面需要很大以容纳许多较小的推进单元,或者(iii)牵引器需要分布在飞行器周围的所有地方,例如,在翼上,以及在乘客舱和/或在机尾上(机尾可能需要翼状附属物来容纳牵引器)。在上述(i)的情况下,这会导致飞行效率低下并且噪音大。在(ii)的情况下,这会导致飞行器不必要地笨重,制造成本更高,在城市区域储存成本更高,并且飞行效率也低。在(iii)的情况下,飞行器内部通信能量/燃料、信息和控制装置所需的基础设施变得广泛分布。因此,这增加了成本,而且飞行器需要复杂的组装。维护和故障检查的成本同样成倍增加。零件故障的几率也增加了。因此,具有在飞行器的各个部分中散布的通信网络意味着飞行器的模块化组装受到极大限制,阻止了在制造(与本发明不同)中节省成本。
在一个实施方式中,飞行器包括有效载荷舱,该舱位于翼的末端之间等距,或者位于两个翼之间。有效载荷舱的设计是为了承载有效载荷。有效载荷可以是民用的、科学的、商用的和/或军用的。有效载荷舱可以是乘客舱,其可以是货物运载舱(例如用于货物、邮件、军械等),和/或有效载荷可以是硬件(例如,大型照相机、武器或其他机器)。在乘客舱的情况下,这可以是朝前或朝后。定义‘向前’(水平)方向的飞行方向,与乘客本身所面对的方向相反。在有效载荷舱包括像机器这样的硬件的情况下,其可以暂时地或永久地固定在适当的位置。飞行器可以由人直接驾驶(单飞行员操作),和/或远程驾驶,和/或其可以是自主的。飞行器可以被配置为以一定范围的重心(CG)位置飞行。有效载荷舱,例如乘客舱,可以是任何合理的形状。
在一个实施方式中,飞行器包括两个翼,每个翼包括TPM和PPM。飞行器可以包括单个(单)翼,或者飞行器可以包括过量的翼。为了设计简单,可以方便地制造单个(单片)翼或带有两个翼的飞行器。零件越少,飞行器的组装就越简单,并且因此制造成本就越低。
在一个实施方式中,翼是机翼(aerofoil),或者具有升力表面。可选地,翼能够为飞行器提供滑翔飞行。对于高效巡航飞行,翼有利地具有机翼形状和足够的表面积,以允许飞行器滑翔。在一个实施方式中,翼是翼状主体,该主体基本上不能滑翔飞行。例如,翼可以是类似于桁杠的结构(或某种其它结构)。该实施方式具有与易于制造相关联的一些优点,并且将具有低质量,并且在巡航飞行中具有相关联的效率。
在一个实施方式中,TPM、PPM和CPM独立地(i)由电池供能;(ii)电池-混合供能或(iii)涡轮-电力供能。认为本发明允许所有三种供能传动系。对于城市飞行,特别是市内飞行,使用电池供能的飞行器将有利地具有低排放和不产生或很少产生噪声污染。城市区域将有很多给电池充电的地方,例如在汇合点之间。具体地,对于电池飞行,确保飞行器在飞行中的高效率是重要的。混合供能飞行器(例如电池和碳氢化合物燃料供能的飞行器)提供与电池相关的好处,即在城市环境中运行的低污染和低噪声,但在需要或紧急情况下有备用能源。此外,在非电池供电的飞行中产生的任何多余能量都可以用来给电池充电,特别是在城市区域之间飞行时,其中城市区域的噪声和排放更能承受。涡轮-电力供能的飞行器具有更好的供能系统效率,因此与常规供能燃气涡轮驱动的飞行器相比,燃料效率更好。涡轮-电力发动机能够实现分布式推进系统,其中一个燃气涡轮和发电机正在产生电力,以运行几个小型推进马达。与现有技术的高旁通涡轮风扇引擎相比,分布式推进允许显著更高的推进效率。涡轮-电力系统能够实现分布式推进系统的实施,因此也是本发明的飞行器中有益的供能系统。
在一个实施方式中,TPM和PPM各自独立地包括一个或多个推进单元;可选地,推进单元包括电动机。TPM和PPM是能够在受控但可变的方向上产生推力的单元。TPM和PPM可各自包括一个或多个推进单元。
在一个实施方式中,TPM和PPM独立地包括1至24个推进单元,进一步可选地,TPM和PPM推进单元的数量相同。在一个实施方式中,TPM和PPM各自独立地包括2、3、4、5、6、7、8、9、10、12、14、16、18、20、22或24个推进单元。
具有更多TPM/PPM单元的配置(如图1所示的6个TPM和6个PPM)的优点是,可以按时间顺序/错开从竖直到水平的力的旋转,反之亦然。即,不需要同时旋转所有单元。例如,这将允许对称翼展位置的单元在任何时候同时移动。这在从悬停转变到向前飞行(并返回悬停)期间将具有相当大的益处,因为竖直推力的损失可以通过固定翼或剩余推进单元增加的升力贡献逐渐补偿。这将导致更平稳的转变,而损失高度的可能性较小和/或者在转变期间提供更好的控制。分阶段/交错转变顺序可以从推进单元的翼展对称对中的任一对开始,即从外侧到内侧,反之亦然,或者从任何其他对称顺序开始。分阶段转变顺序可以重叠或分离。分阶段顺序还可以体现任何单个推进单元对上的推力变化,以进一步改善从悬停到向前飞行并返回的转变动作。转变期间的分阶段顺序也可以是应用于TPM和PPM单元少于6个但是每个都多于2个的配置。参考图1和图2,从图1的配置移动到图2,非限制性的转换顺序可以涉及折叠外旋转对(最靠近翼尖),然后折叠中间对,最后最接近飞行器机身的对。折叠的其他转变顺序也是可能的。折叠可以部分重叠,也可以间隔一定的时间间隔。
拥有多个较小的推进单元有几个优点。这些单元的制造、运输和/或更换比大型单元更便宜。对于高效率的电动机来说尤其如此。在一个单元出现故障的情况下,有更多的单元来补偿这个故障。同样,例如,在螺旋桨驱动的飞行器中,螺旋桨的每一个叶片都需要做得比必要的大(作为故障保险),以便其可以应对其他螺旋桨中的一个发生故障的情况。当有许多较小的螺旋桨时,这种冗余可以分配到所有的螺旋桨上,从而大大节省了总重量和叶片表面积。因此,如果一个或多个推进单元发生故障,本发明仍可以工作。叶片表面积的总体减小(以及相应的电机尺寸和重量的减小)产生的阻力减小,因此飞行效率、特别是在巡航飞行中总体上得到了提高。具有多个推进单元的另一个好处是翼上方空气流量/速度的增加可以产生额外的升力(即分布式电力推进),因此在STOL的情况下,起飞需要更短的跑道。即,分布式电力推进系统可以在翼面积更小的情况下允许更大的升力。更大的升力和更小的翼面积可以实现STOL性能,以及在整个飞行过程中的更小的阻力,因此在巡航飞行中总体上的更好的效率和性能。较小的飞行器更适合城市区域。
在一个实施方式中,推进单元包括螺旋桨或管道风扇。可以认为,根据本发明产生所需推力的任何方法都可以有利地用于本发明。
在一个实施方式中,一个或多个推进单元布置成可在向上和/或向下方向上可逆地倾斜,从而能够改变推力方向。例如,在推进单元是螺旋桨的情况下,在第一位置,螺旋桨可以布置成产生向前的推进推力。在第二位置,螺旋桨可以布置成指向上方(天空)或下方(地面)以产生向上的推进推力。例如可以通过枢轴或铰链上的移动来实现从第一位置到第二位置的移动。可以通过本领域技术人员已知的装置来实现移动,例如致动器、液压装置、电动机等。适当的锁定装置或棘轮可以将推进单元的位置固定在开始或结束位置,或两者之间的任何位置。同样,在管道风扇的情况下,枢转可允许在两个位置之间移动。在一个实施方式中,认为为了实现TPM/PPM的移动,也可以移动翼(或翼的一部分)。认为在TPM/PPM位于桁杠上的情况下,桁杠(或桁杠的一部分)可以移动以实现TPM/PPM的必要移动。
在一个实施方式中,TPM和PPM的推进单元可布置成协同用于飞行器的提升、悬停、低速飞行或受控下降。在一个实施方式中,在升空模式下,TPM布置在向上推进方向上,并且PPM布置在向上推进方向上。在一个实施方式中,在低速、悬停、近悬停飞行模式或受控下降模式下,TPM布置在向上推进方向上,PPM布置在向上推进方向上;其中,净推力导致保持稳定的高度或控制下降(例如在重力的帮助下)。在VTOL飞行/升空过程中,可以根据需要配置TPM和PPM的多个推进单元,以产生正确的推力水平。在悬停式飞行中,将飞行器向下拉动的重力基本上被TPM和PPM的向上推力所抵消。如上所述,这甚至可以通过使用具有可变航向倾角的螺旋桨来实现。当TPM和PPM由大组推进单元(例如螺旋桨)组成时,可以通过将推进单元布置在翼的前部和后部(包括旋转方向)来实现最佳升力和控制(参见图3,该图示出了包括每个螺旋桨的旋转方向的牵引式和推进式螺旋桨的示例布置)。在推进单元是螺旋桨的情况下,则需要适当的注意,以确保至少螺旋桨的叶片不会发生碰撞,例如,通过分隔。
在一个实施方式中,当TPM和/或PPM不在使用中时,其能够以低阻力/空气动力学布置来布置或存储/止动折叠。TPM和PPM非常适合于提升飞行器(和再次着陆),甚至是STOL。然而,其因此不能提供非常高效的巡航飞行。因此,在该实施方式中,当不需要TPM和/或PPM时,其可以被放入空气动力学构造中,或者被存储/止动折叠在空气动力学壳体中,或者可能被缩回在翼空间中。这意味着TPM和/或PPM产生的阻力可以降低或消除。这就相应地提高了巡航效率。在一个实施方式中,当TPM和/或PPM包括螺旋桨时,螺旋桨叶片可以是可折叠的;可选地,其中,螺旋桨叶片在朝向翼的方向上折叠。也就是说,当叶片处于折叠/收起位置时,螺旋桨的叶片和主体几何形状可适于使最小化流分离作用。可以想到,可以通过简单地折叠叶片来减少由螺旋桨引起的阻力。同样,这意味着飞行器在巡航飞行时会更高效率。具体地,这样的效率节省将大大增加任何飞行器的飞行时间(因此飞行范围也大大增加),当飞行器由电池供电时尤其重要,即增加电池续航时间和飞行器范围。
在一个实施方式中,TPM和/或PPM连接到一个或多个桁杠,一个或多个桁杠连接到翼,其中,桁杠在翼的前部和后部延伸。在一个实施方式中,TPM的一个或多个推进单元与桁杠的前部定位,并且PPM的一个或多个推进单元与桁杠的后部定位;可选地,推进单元位于桁杠的远端。可以认为,桁杠可以方便地使TPM和PPM分别位于翼的前部和后部。例如,在翼下方延伸的桁杠可以允许一个或多个推进单元位于翼前缘的前面。同样,例如,在翼下延伸的该桁杠(或另一桁杠)可以允许一个或多个推进单元位于翼后缘的后面。在一个实施方式中,桁杠可以在一端具有牵引式推进装置,而在另一端具有推进式推进装置。桁杠可以在翼上方和/或翼下方。桁杠可以基本上位于翼表面的平面内。桁杠可以缩回翼空间,可能是伸缩式的。桁杠可以是交联的,也可以是分开的。桁杠可以基本上是直的或分叉的。桁杠的前部和后部可以是串联/对齐的,也可以是交错布置的。还考虑到,采用正确的旋转/传递装置,单个电机单元可以为牵引式和推进式螺旋桨两者提供动力(例如,位于桁杠中部附近的电机可以为位于桁杠两端的牵引式和推进式螺旋桨提供动力)。在一个实施方式中,TPM/PPM和/或桁杠附接到翼肋或翼梁,即前梁和后梁。
在一个实施方式中,TPM和PPM的重量被分配以在飞行器上提供很少或不提供转弯力矩,例如与飞行器重心相等的距离。
在一个实施方式中,TPM和/或PPM的推进单元不形成CPM的一部分。在一个实施方式中,CPM位于运输舱和/或翼上;可选地,CPM位于翼尖或小翼上。认为CPM最优化用于以巡航飞行。同样地,TPM和PPM最优化以用于VTOL。在一个实施方式中,当TPM/PPM推进单元是螺旋桨时,这些是被优化以用于竖直起飞和着陆的螺旋桨。在一个实施方式中,当TPM/PPM推进单元是螺旋桨时,这些被优化以用于悬停性能和低噪声。每种飞行模式的需求可能需要完全不同的推进单元。例如,可以使用功率小得多的牵引式或推进式推进装置来推进(向前推进方向的推力)已经在飞行的飞行器。使用TPM/PPM的推进单元中的一个或多个用于巡航飞行可能导致较低效率的巡航飞行。在至少是电池供能的飞行器的情况下,降低巡航飞行效率会大大减少飞行时间持续时间,从而减少飞行器的航程。在有利的高效布置中,本发明允许城市间和城市内飞行。
在一个实施方式中,CPM位于运输舱的前部和/或后部。在一个实施方式中,CPM位于飞行器的机头和/或飞行器的机尾上,并且其中,飞行器包括机头和/或机尾。在一个实施方式中,CPM包括一个或多个推进单元。在一个实施方式中,推进单元包括螺旋桨或管道风扇。CPM可以位于飞行器上的许多位置,并且以不同的配置。可以确定确切的位置以提供最高效的巡航飞行(例如小翼),或者在有空间的地方(例如乘客舱的每一侧)。在一个实施方式中,CPM包括牵引式和/或推进式推进装置。如上所述,CPM可以(i)由电池供能;(ii)电池-混合供能或(iii)涡轮-电力供能。该电源可能与TPM/PPM电源分开。当CPM包括两个或更多个推进单元时,这可以通过产生可变推力(即产生滚转、俯仰和偏航)来用于操纵/控制飞行器。
在一个实施方式中,CPM的推进单元包括螺旋桨。在一个实施方式中,螺旋桨包括2个叶片。也就是说,螺旋桨的叶片的尺寸、数量(1、2、3、4、5、6、7、8、9或10)和配置可以改变,更具体地说,为了向飞行器提供高效巡航飞行。
在一个实施方式中,CPM被适配和/或优化以用于飞行器的高效巡航飞行。
在一个实施方式中,CPM具有推进单元,该推进单元可从向前推进方向可逆地倾斜到向上和/或向下推进方向。
在一个实施方式中,TPM、PPM和/或CPM的推进单元可布置成借助于改变相应推进单元的相对推力来实现飞行器的转向/控制。这可能是通过产生不等的推力,从而产生滚转、俯仰和偏航来操纵/控制飞行器的简单方便的方式。另一种方式是在飞行器的一侧(例如翼上)引起额外的阻力,可能使用襟翼/扰流板,和/或通过部分或完全打开TPM/PPM螺旋桨,从而产生阻力。
在一个实施方式中,飞行器包括一个或多个控制表面。副翼(滚转力矩)、升降舵(俯仰力矩)和方向舵(偏航力矩)等控制表面可以用于控制飞行器。桁杠(或桁杠的一部分)也可以用作控制表面来控制飞行器,可能通过移动来实现受控的可变阻力(例如桁杠在横向于行进方向的方向上的可变倾斜)。
在一个实施方式中,飞行器能够竖直起飞和着陆(VTOL)和短距起飞和着陆(STOL)。
当然,在本发明的飞行器及其实施方式中可以实施许多标准的安全措施。在一个实施方式中,弹道降落伞可以确保在飞行紧急情况下安全回收飞行器和任何无法逃生的人。
在本发明的第二方面中,提供了
一种航空推进模块,包括
分离体;
牵引式推进装置(TPM);
推进式推进装置(PPM);
其中,TPM和PPM独立地包括一个或多个推进单元,推进单元包括电动机;以及
其中,TPM和PPM连接到分离体并由分离体间隔开;以及
其中,分离体能够固定到飞行器的翼上;以及
其中,当分离体附接到飞行器的翼时,TPM布置为位于翼的前部,并且PPM布置为位于翼的后部;以及
其中,当分离体附接到飞行器的翼时,TPM能够提供一推力,该推力的方向能够可逆地从向前推进方向移动到向上推进方向;并且其中,当分离体附接到飞行器的翼时,PPM能够提供一推力,该推力的方向能够可逆地从向前推进方向移动到向上推进方向;
并且其中,TPM和PPM具有能够与飞行器通信的装置。
本发明的这方面考虑了模块化推进单元,该模块化推进单元例如可以组装并附接到一系列飞行器配置上。这种模块的制造将是高效的,将TPM和CPM定位为模块的一部分,并且飞行器和模块可以例如由不同方制造。该模块可以通过例如标准化的固定点固定到飞行器上,或者可以焊接到位。该模块可以具有与飞行器通信的能力。通信装置,即动力/燃料/信息通信线路,可以预先安装在模块中,或者在固定到飞行器时安装。电动机是非常高效的,并且将在模块中提供非常高效的推进单元。该模块可以(i)由电池供能;(ii)电池-混合供能或(iii)涡轮-电力供能。
在一个实施方式中,分离体是桁杠或气动细长形状,可选地,TPM和PPM位于结构/桁杠的远端。桁杠的尺寸可以制造成适合预定容纳模块的飞行器。例如,相当宽的翼需要更长的桁杠。该结构/桁杠可伸缩。
在一个实施方式中,TPM和PPM各自包括单个推进单元。在这种简单的配置中,推进式和牵引式推进装置可以由单个桁杠分开,并且因此代表了制造模块的简单并且成本高效的方法。
在一个实施方式中,推进单元包括螺旋桨或管道风扇。还考虑了其他合适的推进单元。
在一个实施方式中,当分离体附接到飞行器的翼上时,推进单元布置成可在向上和/或向下方向上可逆地倾斜,从而能够改变推力方向。在一个实施方式中,推进单元布置成在相反的方向上可逆地倾斜。当考虑本发明的第一方面时,这些实施方式具有与上述相应部分基本相似(或相同)的益处。
在第三方面,提供了
一种飞行器,包括一个或多个本发明第二方面的航空推进模块。
该方面的飞行器可以受益于模块的相关制造成本的降低。例如,基于飞行器将要承载的预期有效载荷,可以将更多或更少的模块可逆地(或永久地)附接到飞行器上。维修、维护和故障隔离也得到简化,节省了这种飞行器的运行成本。在一个实施方式中,飞行器具有独立的推进装置(即不链接到模块)。
在本发明的第四方面中,提供了根据本发明的第一、第二或第三方面中的任一个的用于航空的飞行器或模块。
在本发明的第五方面中,提供了一种转变到VOTL飞行的方法,其中
能够提供推力的TPM的推力方向布置在向上推进方向上,和/或能够提供推力的PPM的推力方向布置在向上推进方向上,并且其中,当如此布置时,推进单元开启。
在本发明的第六方面中,提供了一种转变到STOL或巡航飞行的方法,其中
能够提供推力的TPM的推力方向布置在向前推进方向上,和/或能够提供推力的PPM的推力方向布置在向前推进方向上;并且其中,当如此布置时,推进单元开启;和/或当能够提供推力的TPM/PPM的推力方向布置在向上推进方向时,TPM和PPM关闭。
在一个实施方式中,在TPM/PPM关闭之后,TPM/PPM的推进单元以低阻力/空气动力学布置来移动或存储/止动折叠。
在推进单元包括具有可折叠叶片的螺旋桨的实施方式中,在推进单元关闭之后,螺旋桨被折叠。在一个实施方式中,螺旋桨叶片在朝向翼的方向上折叠。
应当考虑的是,在本发明的飞行器具有推进单元的示例中,推进单元是具有可折叠叶片的螺旋桨,以下是在VTOL起飞、巡航飞行和VTOL着陆期间可以采取的步骤的示例。牵引式螺旋桨指向上方(天空),推进式螺旋桨指向下方(地面)。如果螺旋桨已经折叠(例如,为了安全储存),其将首先打开(展开)。然后螺旋桨将会被倾斜,然后旋转以产生升力。当达到所需高度(海拔高度)时,螺旋桨将关闭、松开并向水平方向缩回。如果不需要水平(向前)推进,其将被折叠以减少阻力(或放置在低阻力壳体中)。如果需要向前推进,这些可以再次打开。CPM可以在任何需要向前推进的时候打开;但大概是在需要巡航飞行的时候。对于VTOL着陆,可以采用与上述步骤相反的方法。也就是说,螺旋桨叶片可以展开,从水平位置移动/倾斜到向上(牵引式)或向下(推进式),然后打开。对于这种受控下降模式,所产生的上升推力不会超过重力的拉力。如前所述,在具有可变航向倾角的螺旋桨的情况下,牵引式可指向下方以产生向上的推力,和/或推进式可指向上方以产生向上的推力。
在第七方面,提供了一种飞行器,其包括翼,其中,翼的前缘包括能够提供推力的TPM,推力方向在向上推进方向上;并且其中,翼的尾部包括能够提供推力的PPM,推力方向在向上推进方向上;其中,TPM和/或PPM容纳在翼内部。在该方面,简化了制造和安装。可选地,翼包括可以可逆移动的盖;并且其中,当不使用时,TPM和/或PPM被盖覆盖。盖可以保护TPM和PPM免受意外损坏(鸟击和异物碎片等)。在需要时,对于VTO型飞行,可以通过移动一个或多个盖来暴露出TPM/PPM。一个或多个盖可以在翼上方,也可以在翼下方,或者两者都有。盖可以可逆地在翼表面上(或在翼表面内)滑动。此外,可选地,TPM和/或PPM在使用中可移动出翼空间。在该方面的实施方式中,TPM和/或PPM可以包括一个或多个推进单元(例如螺旋桨或管道风扇),并且这些单元可以在横向方向(沿着翼展)上安装/嵌入翼中,或者可以在纵向(弦向位置)方向上嵌入翼中。
在本发明的第八方面中,提供了一种飞行器或模块,其基本上如本文参考附图描述或如所附附图中所示。
术语“前部”和“后部”按照其在航空航天领域中的正常和易于理解的定义使用,分别表示朝向飞行器前方(朝向正常行驶方向)和朝向飞行器后方(远离正常行驶方向)。
现在将参照以下非限制性实施方式和所附说明性附图进一步描述本发明,在附图中:
附图说明
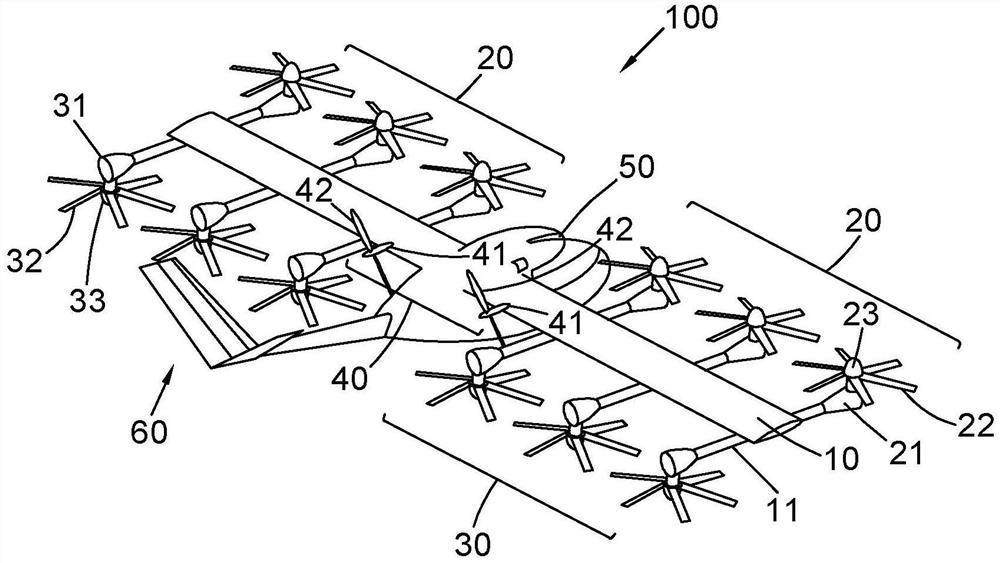
图1是本发明实施方式的后侧透视图,其中,螺旋桨叶片展开(非折叠)。
图2是同一实施方式的前侧透视图,其中,螺旋桨叶片被折叠。
图3是本发明实施方式的示意性顶视图,示出了螺旋桨的相对旋转方向(顺时针或逆时针)。
图4从顶部透视图示出了本发明的另一个实施方式。
图5从顶部透视图示出了本发明的另一个实施方式。
相似的特征被赋予了相似的附图标记。
具体实施方式
图1示出了本发明的飞行器的实施方式(100)的后侧透视图。该飞行器具有附接到驾驶舱/载客舱(50)的两个翼(10),并且具有尾部(60)。尾部具有带有V形尾鳍(62)的细长尾翼(61)。飞行器具有与气流对齐的细长流线型机身。
在每个翼的下方是三个桁杠(11),在桁杠的末端安装有推进单元,即牵引式螺旋桨(21)和推进式螺旋桨(31),每个螺旋桨具有6个可折叠的叶片(22、32)。叶片处于展开(打开)配置。牵引式螺旋桨(21)指向上方,并且推进式螺旋桨(21)指向下方。在翼(10)的后缘上,靠近驾驶舱/载客舱(50)有两个双叶片推进式螺旋桨(41)。牵引式螺旋桨(21)组合以形成TPM(20)的一部分,推进式螺旋桨(31)组合以形成PPM(30)的一部分,两个双叶片螺旋桨(41)组合以形成CPM(40)的一部分。该飞行器具有起落架(70)。
图2示出了与图1基本相同但是从前侧透视图的实施方式。从图1到图2的主要变化是,推进单元(21;31)的可折叠叶片(22;32)已经折叠到关闭位置(23;33),降低了螺旋桨的空气阻力。
在图1中,飞行器显示为VTOL飞行模式,在图2中,飞行器显示为巡航飞行模式,仅由两个双叶片(42)的螺旋桨(41)提供动力。
图3示出了图1所示飞行器的示意图,示出了典型VTOL升空过程中牵引式螺旋桨和推进式螺旋桨的相对旋转方向。图中的“点”表示旋转轴,箭头表示旋转方向(从上面看)。
图4示出了与图2基本相同但是从顶透视图的实施方式。从图2到图4的主要变化是两个双叶片推进式螺旋桨(41)已经重新放置在翼尖上的小翼上。
图5示出了与图2基本相同但是从顶透视图的实施方式。从图2到图5的主要变化是两个双叶片推进式螺旋桨(41)被安装在翼上方和翼之间的涡轮-电力引擎所取代。这可以用于巡航飞行,并且任何多余的能量都可以用来给现有的电池充电。
- 飞行器和模块化推进单元
- 飞行器进气口内壁及相关飞行器短舱、推进单元和飞行器