高空台环境模拟系统阀控液压缸冗余控制装置及控制方法
文献发布时间:2024-01-17 01:14:25
技术领域
本说明书涉及航空发动机高空模拟技术领域,具体涉及一种高空台环境模拟系统阀控液压缸冗余控制装置及控制方法。
背景技术
高空模拟试车台(简称高空台)是航空发动机预先研究、产品研制、技术攻关和故障再现与排除的重要工具和手段,在高空台开展发动机高空模拟试验的关键之一就是发动机空中飞行工作环境的准确模拟问题,环境模拟系统正是实现发动机空中飞行工作环境准确模拟的核心设备,该系统通过调节发动机进气压力、温度以及试验舱环境压力来建立起发动机在不同高度、马赫数下的进排气飞行环境条件,其控制品质直接决定了高空台模拟试验的准确性和置性度。
阀控液压缸是环境模拟系统的核心传动和动力部件,在高空模拟试验中系统统筹调度阀控液压驱动调节装置实时模拟航空发动机的空中飞行环境,因此阀控液压缸的安全可靠性直接关乎被试发动机及配套试验设备的运行安全。当前控制系统阀控液压缸均为单一“液压缸-电液伺服阀-线位移传感器”的结构形式,一旦电液伺服阀、位移传感器、控制线路等其中一元器件出现故障,则阀控液压缸将完全失控,直接威胁到发动机及配套设备的运行安全,因此需设计一种阀控液压缸冗余控制装置,以提升其安全工作裕度,从而有效保障发动机高空模拟试验安全。
发明内容
有鉴于此,本说明书实施例提供一种高空台环境模拟系统阀控液压缸冗余控制装置及控制方法,以达到提升安全工作裕度的目的。
本发明的技术方案为:一种高空台环境模拟系统阀控液压缸冗余控制装置,包括液压缸,高空台环境模拟系统阀控液压缸冗余控制装置还包括阀组功能块,设置在液压缸上,阀组功能块包括:电液伺服阀控制回路,与液压缸连接;三位四通换向阀控制回路,与液压缸连接并与电液伺服阀控制回路并联设置,且三位四通换向阀控制回路在常态下为常闭回路。
进一步地,电液伺服阀控制回路包括:电液伺服阀,与液压缸连通;多个外泄式液控单向阀,分别设置在电液伺服阀的P油口、A油口和B油口;两位四通电磁阀,与多个外泄式液控单向阀连接并能够控制每个外泄式液控单向阀的开闭。
进一步地,三位四通换向阀控制回路包括:三位四通换向阀,与液压缸连通;多个液压锁,设置在三位四通换向阀的A油口和B油口。
进一步地,高空台环境模拟系统阀控液压缸冗余控制装置还包括第一线位移传感器和第二线位移传感器,第一线位移传感器设置在液压缸的活塞杆内部,第二线位移传感器设置在液压缸的缸体外侧。
进一步地,电液伺服阀包括第一线圈和第二线圈,高空台环境模拟系统阀控液压缸冗余控制装置还包括第一比例控制器和第二比例控制器,第一比例控制器能够接收第一线位移传感器的位置信号和阀门位置设定信号并将第一比例控制器输出信号输送至第一线圈;第二比例控制器能够接收第二线位移传感器的位置信号和阀门位置设定信号并将第二比例控制器输出信号输送至第二线圈。
本发明还提供了一种高空台环境模拟系统阀控液压缸冗余控制方法,采用上述的高空台环境模拟系统阀控液压缸冗余控制装置进行,高空台环境模拟系统阀控液压缸冗余控制方法包括以下步骤:当电液伺服阀控制回路正常工作时,两位四通电磁阀不得电,压力油通过两位四通电磁阀流入多个外泄式液控单向阀的先导控制侧,多个外泄式液控单向阀处于双向打开状态,三位四通换向阀控制回路闭合。
进一步地,当电液伺服阀控制回路未正常工作时,两位四通电磁阀得电,多个外泄式液控单向阀均闭合,三位四通换向阀控制回路开启。
进一步地,高空台环境模拟系统阀控液压缸冗余控制装置还包括第一比例控制器和第二比例控制器,高空台环境模拟系统阀控液压缸冗余控制方法包括以下步骤:当第一比例控制器内部的线圈或者传感器故障时,自动切换至第二比例控制器;或者,当第二比例控制器内部的线圈或者传感器故障时,自动切换至第一比例控制器。
与现有技术相比,本说明书实施例采用的上述至少一个技术方案能够达到的有益效果至少包括:本发明的高空台环境模拟系统阀控液压缸冗余控制装置配备了电液伺服阀控制回路和三位四通换向阀控制回路在电液伺服阀或者线位移传感器出现故障时,能够实现电液伺服控制回路自身、电液伺服控制回路和三位四通换向控制回路间的冗余切换,从而拓展了阀控液压缸的工作安全裕度,保障了高空模拟试验安全。
附图说明
为了更清楚地说明本申请实施例的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本申请的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其它的附图。
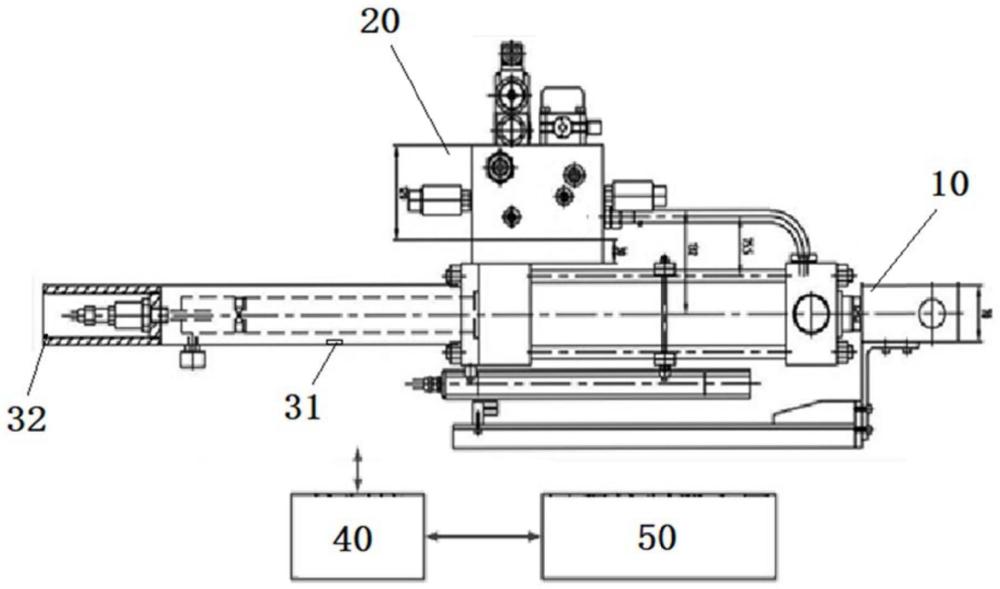
图1是本发明实施例的整体结构示意图;
图2是阀组功能块的结构示意图。
图中附图标记:10、液压缸;20、阀组功能块;21、电液伺服阀;22、外泄式液控单向阀;23、两位四通电磁阀;24、三位四通换向阀;25、液压锁;31、第一线位移传感器;32、第二线位移传感器;40、控制接线箱;50、远程控制器。
具体实施方式
下面结合附图对本申请实施例进行详细描述。
以下通过特定的具体实例说明本申请的实施方式,本领域技术人员可由本说明书所揭露的内容轻易地了解本申请的其他优点与功效。显然,所描述的实施例仅仅是本申请一部分实施例,而不是全部的实施例。本申请还可以通过另外不同的具体实施方式加以实施或应用,本说明书中的各项细节也可以基于不同观点与应用,在没有背离本申请的精神下进行各种修饰或改变。需说明的是,在不冲突的情况下,以下实施例及实施例中的特征可以相互组合。基于本申请中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本申请保护的范围。
如图1和图2所示,本发明实施例提供了一种高空台环境模拟系统阀控液压缸冗余控制装置,包括液压缸10,高空台环境模拟系统阀控液压缸冗余控制装置还包括阀组功能块20,设置在液压缸10上,阀组功能块20包括:电液伺服阀控制回路和三位四通换向阀控制回路,电液伺服阀控制回路与液压缸10连接;三位四通换向阀控制回路与液压缸10连接并与电液伺服阀控制回路并联设置,且三位四通换向阀控制回路在常态下为常闭回路。
本发明的高空台环境模拟系统阀控液压缸冗余控制装置配备了电液伺服阀控制回路和三位四通换向阀控制回路能够在电液伺服阀或者线位移传感器出现故障时,能够实现电液伺服控制回路自身、电液伺服控制回路和三位四通换向控制回路间的冗余切换,从而拓展了阀控液压缸的工作安全裕度,保障了高空模拟试验安全。
电液伺服阀控制回路包括电液伺服阀21、多个外泄式液控单向阀22和两位四通电磁阀23。电液伺服阀21与液压缸10连通;多个外泄式液控单向阀22分别设置在电液伺服阀21的P油口、A油口和B油口;两位四通电磁阀23与多个外泄式液控单向阀22连接并能够控制每个外泄式液控单向阀22的开闭。
电液伺服控制回路正常工作时,两位四通电磁阀23不得电,压力油通过电液伺服阀21流入三个外泄式液控单向阀22的先导控制侧,三个外泄式液控单向阀22处于双向打开状态,通过电液伺服阀21对液压缸10进行控制。
当电液伺服控制回路均出现故障时,通过阀组功能块外部切换按钮使两位四通电磁阀23得电,三个外泄式液控单向阀22先导控制侧油路与回油侧沟通,外泄式液控单向阀22主阀芯由于没有足够的控制力而关闭,电液伺服阀21从控制回路中隔离,通过三位四通换向控制回路对液压缸10进行手动应急控制。
具体地,三位四通换向阀控制回路包括三位四通换向阀24和多个液压锁25。三位四通换向阀24与液压缸10连通;多个液压锁25设置在三位四通换向阀24的A油口和B油口。
液压锁25在常态下处于关闭状态,当三位四通换向阀24工作时液压锁25由于压力原因开启,从而使三位四通换向阀24液压缸10连通。
优选地,高空台环境模拟系统阀控液压缸冗余控制装置还包括第一线位移传感器31和第二线位移传感器32,第一线位移传感器31设置在液压缸10的活塞杆内部,第二线位移传感器32设置在液压缸10的缸体外侧。电液伺服阀21包括第一线圈和第二线圈,高空台环境模拟系统阀控液压缸冗余控制装置还包括第一比例控制器和第二比例控制器,第一比例控制器能够接收第一线位移传感器31的位置信号和阀门位置设定信号并将第一比例控制器输出信号输送至第一线圈;第二比例控制器能够接收第二线位移传感器32的位置信号和阀门位置设定信号并将第二比例控制器输出信号输送至第二线圈。
设计电液伺服冗余第一控制回路、第二控制回路和控制回路输出使能开关。每个控制回路均采用比例控制器,第一控制回路和第二控制回路分别实时接收第一线位移传感器31的位置信号、第二线位移传感器32的位置信号和阀门位置设定信号,通过比例控制器计算获得第一比例控制器输出信号和第二比例控制器输出信号,依据控制回路输出使能开关自动选择第一控制回路或第二控制回路工作,并将第一比例控制器输出信号作用于电液伺服阀第一线圈(或将第二比例控制器输出信号作用于电液伺服阀第二线圈),以控制伺服阀驱动液压缸动作。
进一步地,高空台环境模拟系统阀控液压缸冗余控制装置还包括控制接线箱40和远程控制器50,控制接线箱40与第一线位移传感器31和第二线位移传感器32通讯连接,远程控制器50与控制接线箱40连接。
本发明还提供了一种高空台环境模拟系统阀控液压缸冗余控制方法,采用上述的高空台环境模拟系统阀控液压缸冗余控制装置进行,高空台环境模拟系统阀控液压缸冗余控制方法包括以下步骤:
当电液伺服阀控制回路正常工作时,两位四通电磁阀23不得电,压力油通过两位四通电磁阀23流入多个外泄式液控单向阀22的先导控制侧,多个外泄式液控单向阀22处于双向打开状态,三位四通换向阀控制回路闭合。
当电液伺服阀控制回路未正常工作时,两位四通电磁阀23得电,多个外泄式液控单向阀22均闭合,三位四通换向阀控制回路开启。
电液伺服阀控制回路始终处于优先控制级,其正常工作时,两位四通电磁阀23不得电,此时压力油通过电液伺服阀21流入三个外泄式液控单向阀22的先导控制侧,三个外泄式液控单向阀22处于双向打开状态,电液伺服阀21可对阀门进行控制。
电液伺服控制回路均出现故障,通过阀组功能块外部切换按钮使两位四通电磁阀23得电,三个外泄式液控单向阀22先导控制侧油路与回油侧沟通,外泄式液控单向阀22主阀芯由于没有足够的控制力而关闭,电液伺服阀21从控制回路中隔离,通过三位四通换向阀24对液压缸10进行手动应急控制。
优选地,高空台环境模拟系统阀控液压缸冗余控制装置还包括第一比例控制器和第二比例控制器,高空台环境模拟系统阀控液压缸冗余控制方法包括以下步骤:
当第一比例控制器内部的线圈或者传感器故障时,自动切换至第二比例控制器;或者,
当第二比例控制器内部的线圈或者传感器故障时,自动切换至第一比例控制器。
若第一比例控制器内部或第二比例控制器内部的线圈或位移传感器等出现故障,则自动切换至另一个控制回路。能够实现电液伺服控制回路自身、电液伺服控制回路和三位四通换向控制回路间的冗余切换,从而拓展了阀控液压缸的工作安全裕度,保障了高空模拟试验安全。
以上所述,仅为本申请的具体实施方式,但本申请的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本申请揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本申请的保护范围之内。因此,本申请的保护范围应以权利要求的保护范围为准。
- 过分相装置及其阀控系统、阀控冗余控制系统和阀组控制方法
- 高空模拟试车台进气环境模拟系统解耦控制方法