飞行器、航空、宇宙航行
-
固装箱铰链系统
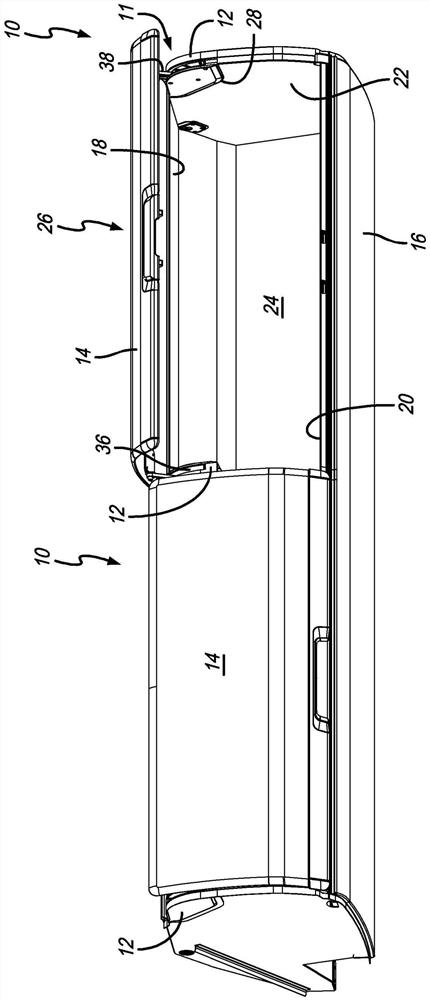
一种用于航空器顶置存放箱的铰链组件,其包括:壳体,所述壳体具有铰链空间和在其中限定的铰链开口;在铰链空间内可枢转地连接到壳体的臂;以及阻尼器。铰链开口连通铰链空间与壳体的外部。臂可在关闭位置与打开位置之间枢转,并且臂延伸通过铰链开口使得臂的第一端定位在壳体外。阻尼器包括第一和第二端。第一端连接到壳体并且第二端连接到臂。阻尼器将臂从关闭位置偏压到打开位置。
2023-08-21 -
用于飞行器座椅的可移动搁脚凳
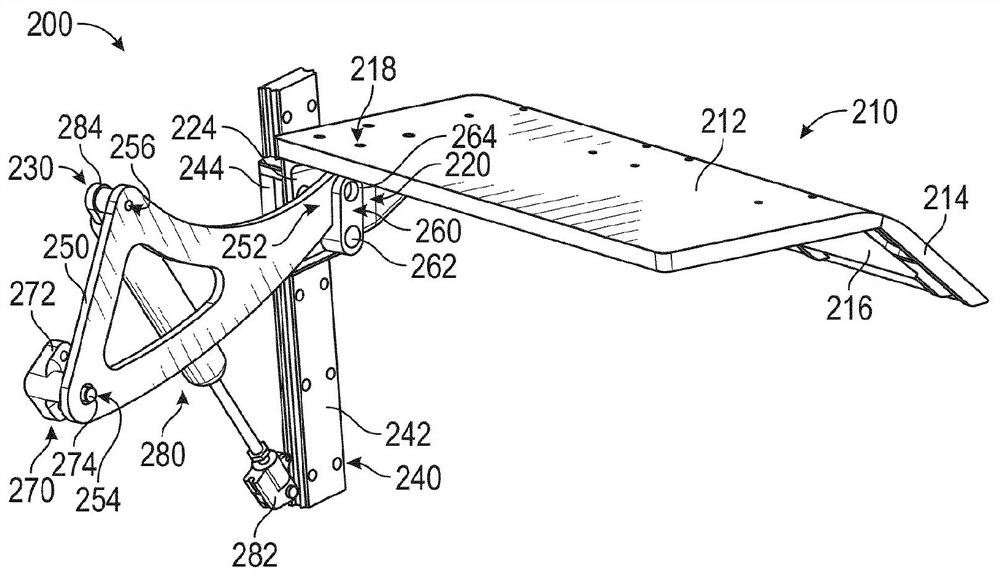
一种用于飞行器座椅的搁脚凳,该搁脚凳包括引导组件、脚平台和致动器组件。该引导组件被配置为联接到该飞行器座椅的框架。该引导组件包括引导件和可沿着该引导件平移的滑块。该脚平台联接到该滑块。该致动器组件被配置为选择性地沿着该引导件平移该滑块以将该脚平台重新定位在收起位置与展开位置之间。该致动器组件包括致动器和臂。该臂限定联接到该滑块的第一接口和联接到该致动器的第二接口。该致动器的接合使得该臂枢转并且沿着该引导件移动该滑块。
2023-08-21 -
一种用于快递运输的载重无人机及其使用方法
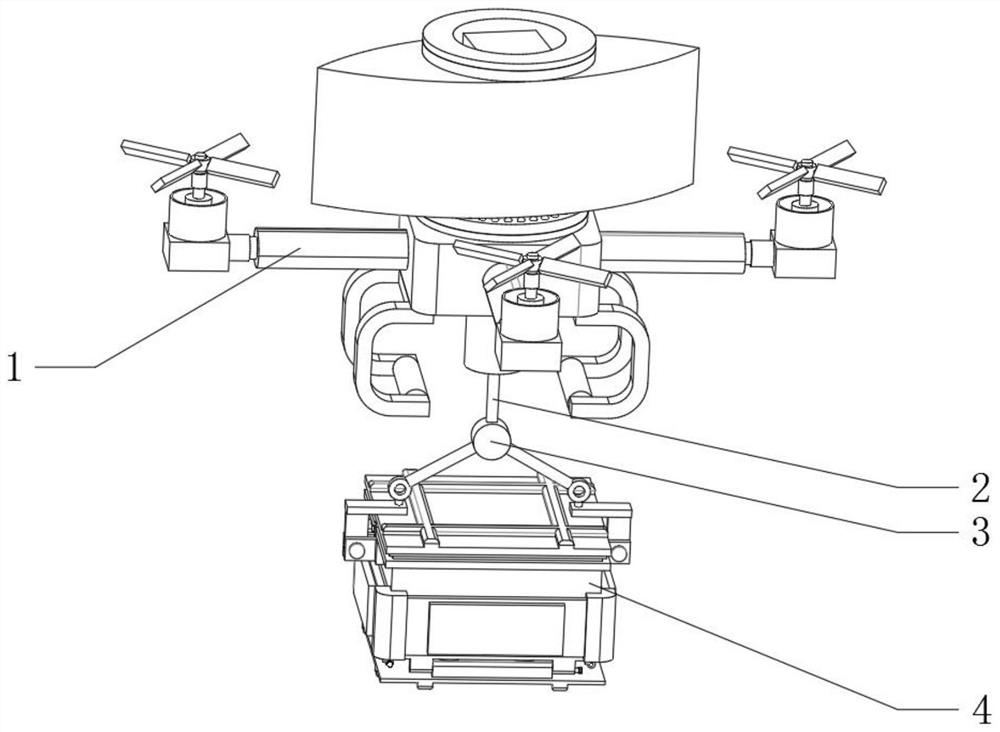
本发明公开了一种用于快递运输的载重无人机及其使用方法,涉及快递无人机技术领域;为了解决包裹与无人机之间柔性连接的问题;该快递无人机包括无人机组件,所述无人机组件底部内壁固定连接有绳索,绳索底端外壁通过分散器分列为两股,两股绳索底端外壁均固定连接有包裹组件;该快递无人机的使用方法包括如下步骤:安置包裹、固定组装、调节起飞、减阻飞行、判定降落、分离降落、取出包裹。本发明通过设置绳索,能够实现无人机组件与包裹组件的软性连接,其一能够避免传统无人机携带快递包裹进行着陆时,快递硬性落地,回传的冲击力影响无人机飞控系统;其二能够减小运输过程中于空中的整体体积,减少撞击事故的发生。
2023-08-21 -
一种应用于机载航炮地面热校靶的飞机姿态调整方法
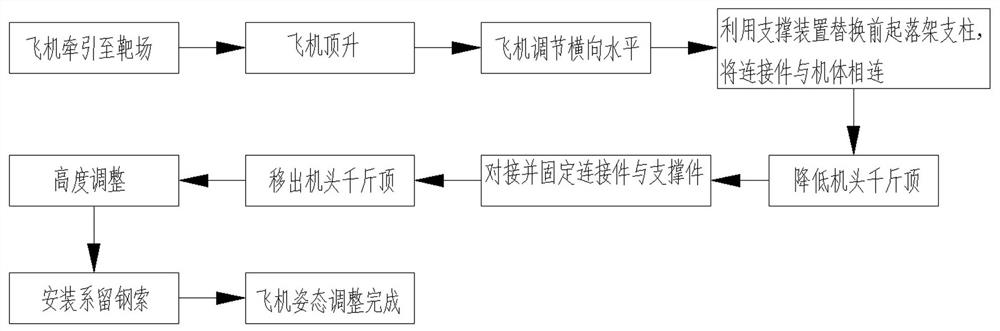
本发明涉及飞机校准技术领域,特别是涉及一种应用于机载航炮地面热校靶的飞机姿态调整方法,利用支撑装置替换前起落架支柱,实现机头千斤顶的取消,依靠支撑装置、左右机翼千斤顶的高度差来实现飞机轴线与地面水平线的夹角变化,实现飞机轴线的下倾,使航炮炮口轴线距离地面的高度满足要求。通过本方法,能有效解决千斤顶与飞机接触面的结构强度无法承受航炮射击过程中的载荷和航炮地面热校靶过程中飞机后坐力导致飞机滑脱的问题。
2023-08-21 -
一种无人机大坡度稳盘机动控制方法
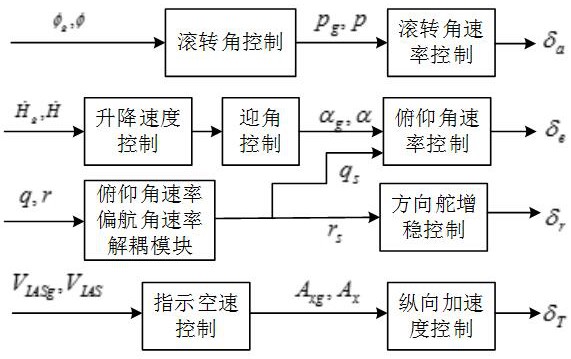
本申请属于航空器飞行控制技术领域,尤其涉及一种无人机大坡度稳盘机动控制方法,其具体步骤包括:升降舵通道、发动机通道、副翼通道及方向舵通道的控制方案和控制律;升降舵通道采用升降速度‑迎角‑俯仰角速率级联控制结构,防止机动过程失速;发动机通道以纵向加速度为内环,指示空速为外环实现速度的快速响应;副翼通道以滚转角速率控制为内环,外环控制滚转角实现大坡度滚转盘旋运动;方向舵通道用于增稳,消除由大坡度滚转产生的不利侧滑,实现无侧滑转弯,保证航向动态变化的稳定可控。本发明能防止大坡度稳盘机动过程中迎角过大失速,并实现不同情况下无人机的稳定盘旋。
2023-08-21 -
一种无人机助推火箭推力线与重心偏差测量装置及方法
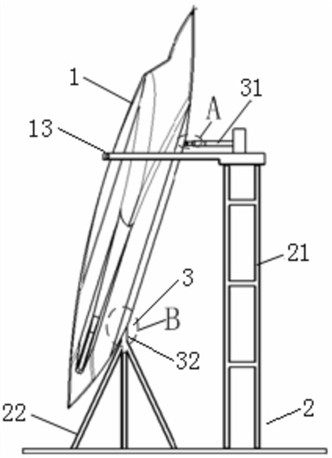
本申请涉及无人机技术领域,公开了一种无人机助推火箭推力线与重心偏差测量装置及方法,所述测量装置与无人机连接,包括支撑部件和测量部件,所述支撑部件包括第一支撑架和第二支撑架,所述测量部件包括第一测量机构和第二测量机构,第一测量机构安装在第一支撑架上并与无人机的支撑接头连接,第二测量机构安装在推力锥的下部,所述推力锥为外圆锥形,底面设置有与无人机机腹连接的底座法兰,底座法兰上设置有用于固定的腰型孔,推力锥的另一端与第二支撑架转动连接。本申请特别适用于体积和重量较大而翻转不便的无人机,在实际测量时无需翻转即可方便测量出无人机重心与推力线之间的距离。
2023-08-21 -
一种事后高精度姿态确定方法
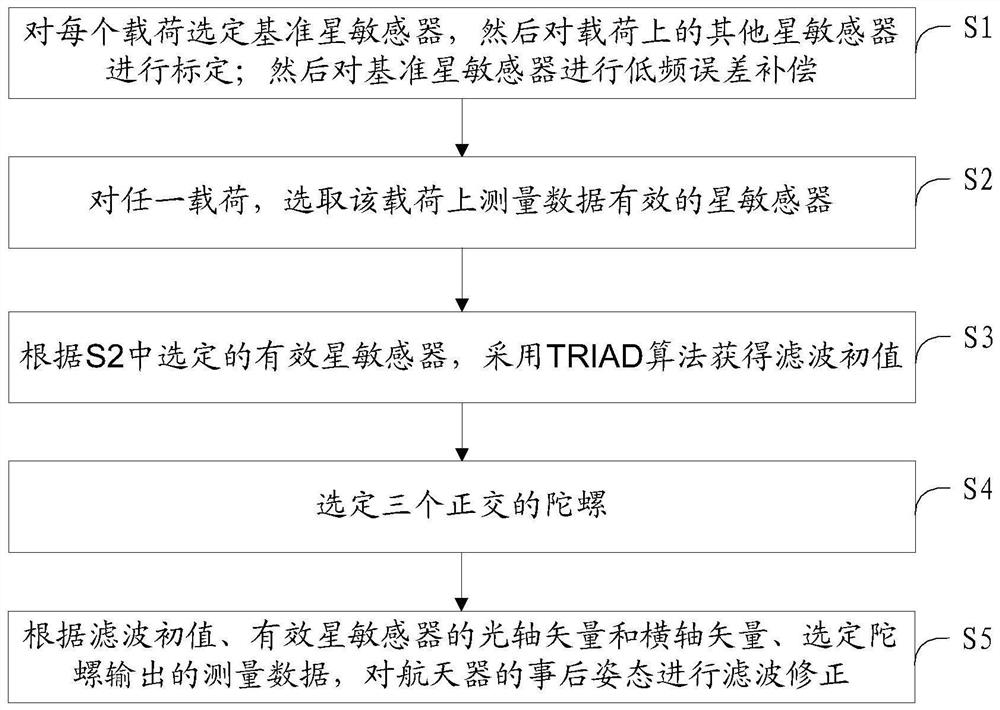
一种事后高精度姿态确定方法,属于航天器姿态控制领域,适用于具有多载荷的有事后高精度姿态确定需求的航天器。该方法首先在多个载荷上分别安装至少两台甚高精度星敏感器;其次根据各载荷上的星敏感器测量数据进行星敏基准标定;最后根据各个载荷上各自的星敏感器测量数据和陀螺测量数据进行卡尔曼滤波修正,进行该载荷的事后高精度姿态确定。
2023-08-21 -
一种确定飞机自动锪窝深度的方法
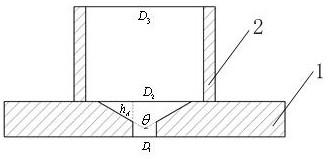
本发明公开了一种确定飞机自动锪窝深度的方法,首先根据连接件尺寸,确定平面工件的锪窝深度h;根据工件外形曲率半径与压环的尺寸,确定压环压紧间隙引入的窝深补偿深度h;根据工件外形曲率半径与连接件尺寸,确定连接件安装阶差引入的窝深补偿深度h;得到飞机自动锪窝深度hh+h+h。本发明计算得到的飞机自动锪窝深度综合考虑了连接件外形,工件外形,压环尺寸,连接件安装后形成阶差四个因素的影响,可以针对性对飞机上每个孔的锪窝深度进行精确控制,有助于提高安装连接件后的飞机表面质量。
2023-08-21 -
一种运载器垂直回收着陆系统、运载器及展开方法
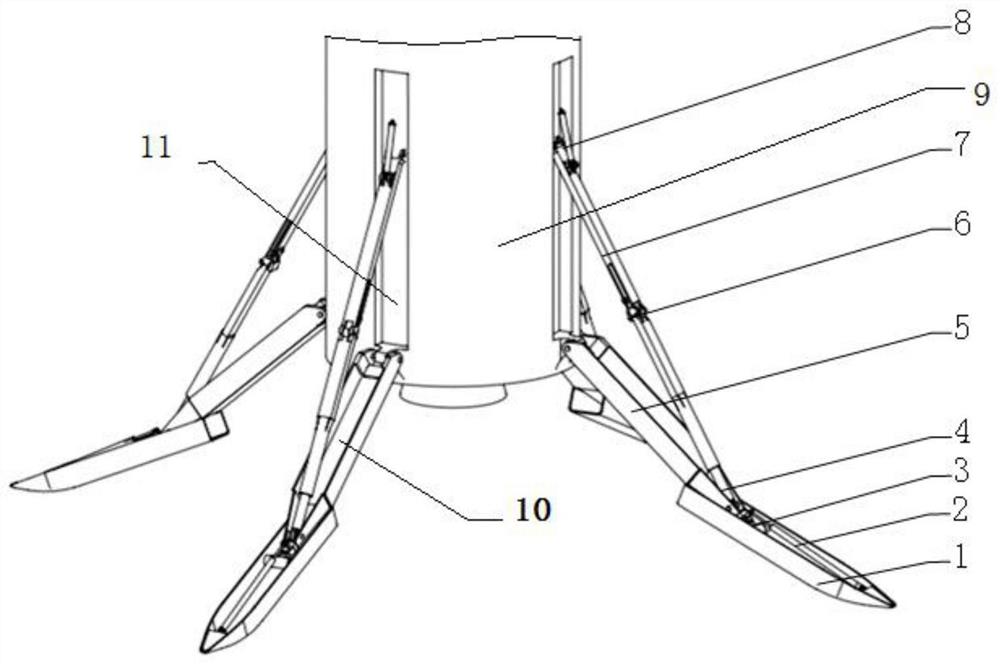
本申请提供一种运载器垂直回收着陆系统、运载器及展开方法,其中系统包括至少3组均匀分布在运载器尾段侧壁的着陆装置;每组着陆装置包括一端铰接在运载器尾段侧壁底部的摇臂、与摇臂的另一端通过第一扭簧转轴连接的支腿;支腿靠近运载器尾段的一侧设有支腿锁机构;支腿在运载器发射或飞行状态时通过爆炸螺栓与运载器尾段的侧壁固定连接;摇臂靠近运载器尾段的一侧设有可折叠的缓冲器和撑杆,还设有撑杆锁;撑杆远离缓冲器的一端与运载器尾段的侧壁可转动连接;撑杆靠近运载器尾段侧壁的一侧还通过关节轴承与作动筒的活塞杆端部连接。本申请整体采用折叠撑杆方式,对运载器外形及结构影响较小,具有结构紧凑、单一执行机构、可重复使用等优点。
2023-08-21