飞行器、航空、宇宙航行
-
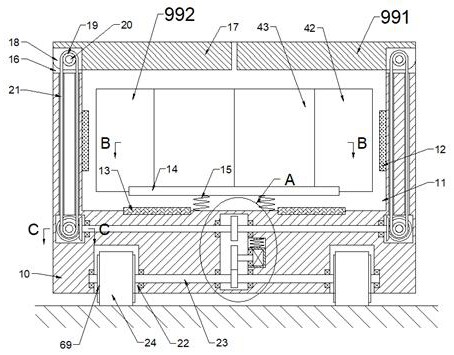
一种载人飞艇座舱通风加温装置及方法
本发明属于特种飞行器环境控制技术领域,公开了一种载人飞艇座舱通风加温装置,包括:引气口、暖风装置、风量调节组件、通气管道、风挡除雾喷口和乘客通气口;其中,所述引气口的出气口与暖风装置的进气口连通,所述暖风装置的出气口与风量调节组件的进气口连通,所述风量调节组件的出气口与通气管道的进气口连通,所述进气管道的出气口分别与风挡除雾喷口、乘客通气口连通,克服常规发动机尾气换热与空调加热的弊端,实现载人飞艇座舱通风加热,满足载人飞艇不同条件下的使用要求。
2023-08-21 -
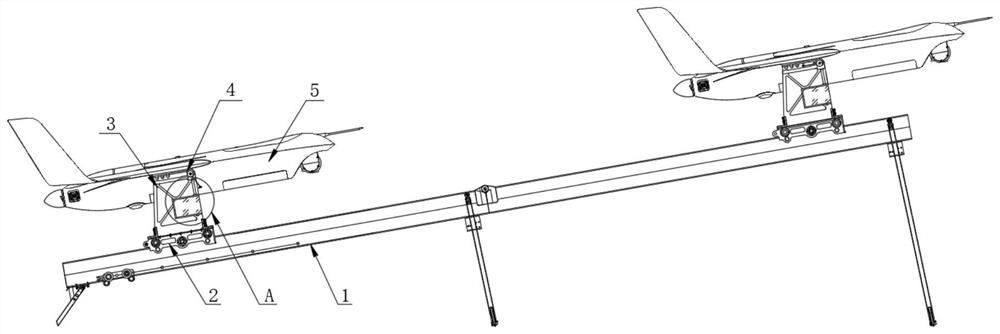
连发无人机电磁弹射系统及无人机机库
连发无人机电磁弹射系统及无人机机库,包括无人机电磁弹射装置和无人机机库,无人机机库设置在无人机电磁弹射装置其无人机弹射端的一侧,无人机机库包括能够搭载一定数量无人机的传送机构,能够将其所搭载的无人机填装至无人机弹射平台上;无人机弹射平台搭载无人机后,无人机弹射平台在弹射电机的驱动下沿弹射导轨加速运动,实现无人机的弹射起飞后,无人机弹射平台制动并沿弹射导轨反向运动,实现无人机弹射平台的复位,以准备下一次的无人机加载以及弹射。无人机机库实现无人机贮存、运输。平时,可以贮存一定数量规模的无人机,提高了无人机的维护性和可靠性;战时,可由传送机构连续向电磁弹射器装填无人机,实现无人机连续弹射起飞。
2023-08-21 -
电动变桨式涡轮螺旋桨发动机
本发明涉及电动变桨式涡轮螺旋桨发动机。包括螺旋桨,螺旋桨包括外壳、桨叶和变桨机构,各桨叶转动装配在外壳上,桨叶包括转盘、叶片和偏心拨杆,叶片和转盘同轴,外壳内在各个转盘之间构成多边形安装腔,变桨机构包括电机、减速器、联轴器和丝杠,变桨机构还包括拨动盘,拨动盘通过丝杠螺母安装在丝杠上,丝杠转动装配在外壳上,拨动盘通过止转面与多边形安装腔的腔壁周向止转配合、轴向滑动配合,拨动盘随丝杠的旋转而沿丝杠轴向移动,拨动盘与各偏心拨杆一一对应设置有U形槽,各偏心拨杆插装在对应U形槽内,拨动盘沿丝杠轴向移动时通过U形槽推动偏心拨销沿转盘的轴线旋转。具有可快速响应以改变桨叶角、安全稳定、体积小巧的优点。
2023-08-21 -
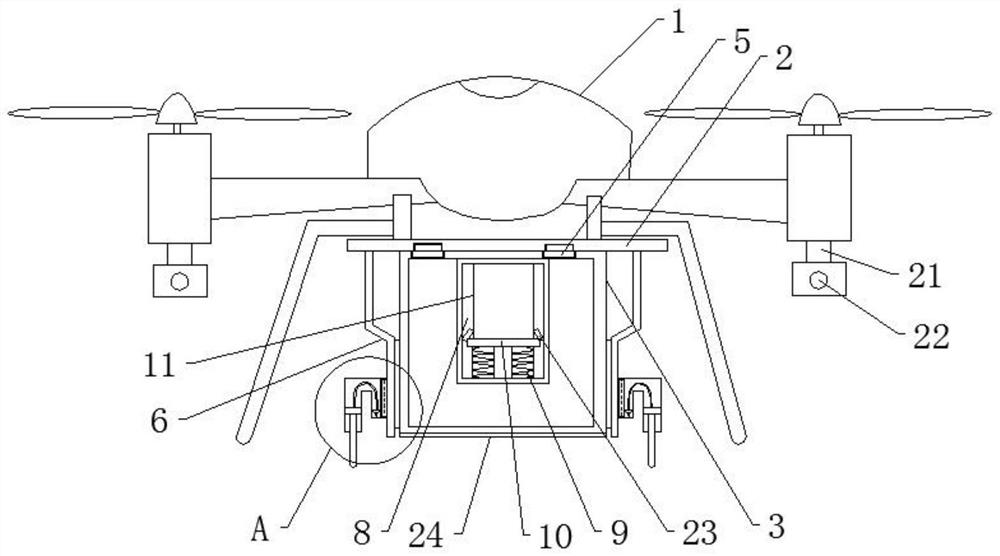
一种无人机的减振式起落架

本发明公开了一种无人机的减振式起落架,包括安装于无人机上的液压阻尼器,与液压阻尼器的活塞杆铰接且与机轮活动连接的轮架,以及两端分别与液压阻尼器的缸体和轮架连接的拉簧。本发明通过三部分的衰减结构可以使无人机的各部分零部件受到的冲击极大地被衰减,以保证无人机的安全起落,并且拉簧的两端套设于插销上,从而可以快速地将拉簧与液压阻尼器和轮架连接在一起。在拆卸时,只需将拉簧的该端脱出插销即可快速地将拉簧拆卸下来,拆卸和更换方便、快捷。本发明还可以根据无人机的总体重量,通过更换不同的拉簧和液压阻尼器,可以调节起落架承重的范围,使搭配承重在许可范围内,使用灵活和范围广。
2023-08-21 -
一种面向成像卫星的目标可见弧段确定方法
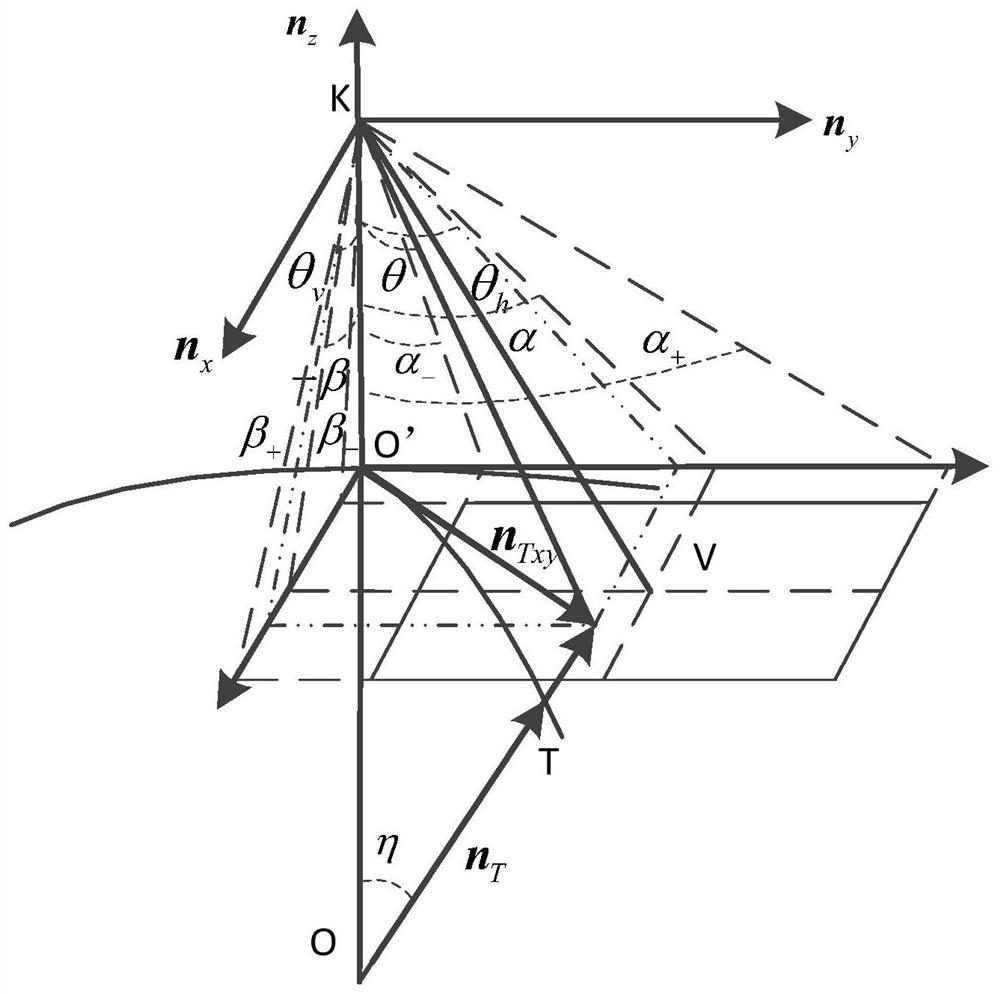
本发明一种面向成像卫星的目标可见弧段确定方法,步骤如下:(1)计算得到姿态机动能力与载荷视场范围的复合可视视场角;(2)确定当前轨道位置卫星与目标间的几何可见性;(3)确定当前轨道位置卫星与目标间的载荷可见性;(4)根据轨道信息及卫星当前轨道位置高度,计算步长Δt,获取下一轨道时刻t,进而获取下一个轨道时刻的位置;(5)重复步骤(2)‑(4),直至轨道点遍历结束,根据自适应抽样可见性计算结果合并生成粗粒度可见弧段区间;(6)在粗粒度可见弧段首尾处进行区间延展,形成精细可见弧段区间。
2023-08-21 -
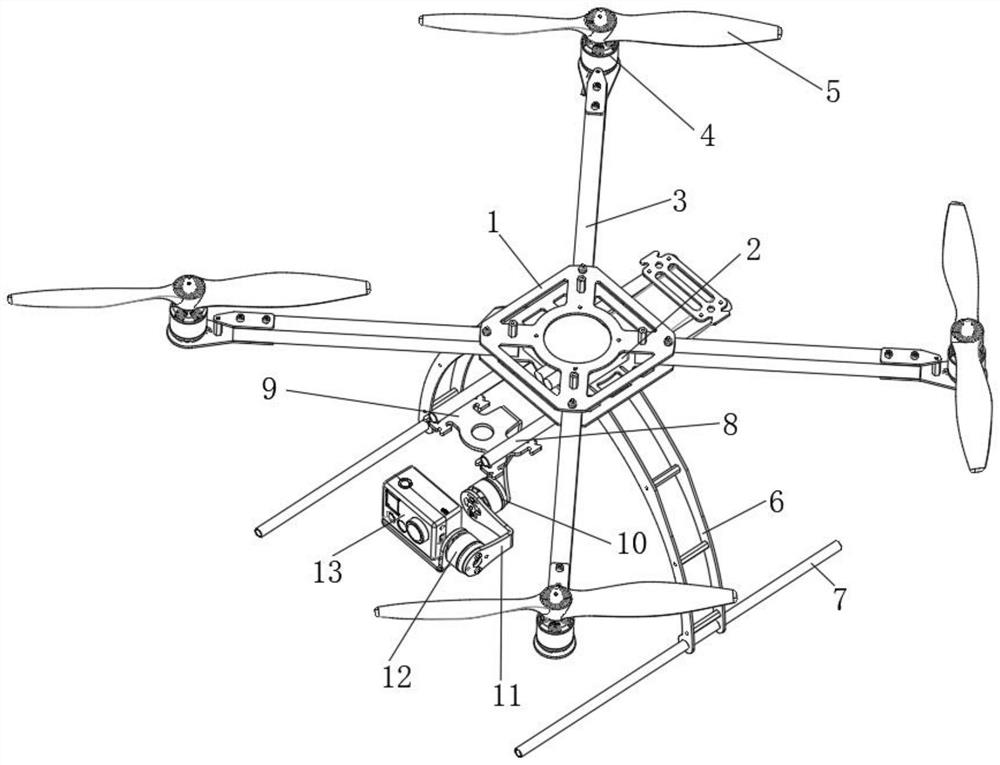
一种具有投放功能的多旋翼飞行器及其控制方法
本发明涉及飞行器技术领域,公开了一种具有投放功能的多旋翼飞行器及其控制方法,该多旋翼飞行器的飞行器主体的上方安装有太阳能板,且飞行器主体的下方固接有固定杆,所述固定杆的末端固定安装有连接板,所述连接板的下表面安装有安装架,所述安装架的下方转动安装有转动板,所述转动板的一侧固接有放置板,所述连接板的下方在放置板的上方设置有固定板。通过摄像头内部设置的位置传感器,使得飞行器主体接近或到达指定位置后对主控制器发送命令,从而使得转动电机工作使得翻转轴旋转并带动转动轴转动,继而使得转动轴外部设置的转动板倾斜使得放置板上的物件掉落,从而能够自动化准确的将物件进行投放。
2023-08-21 -
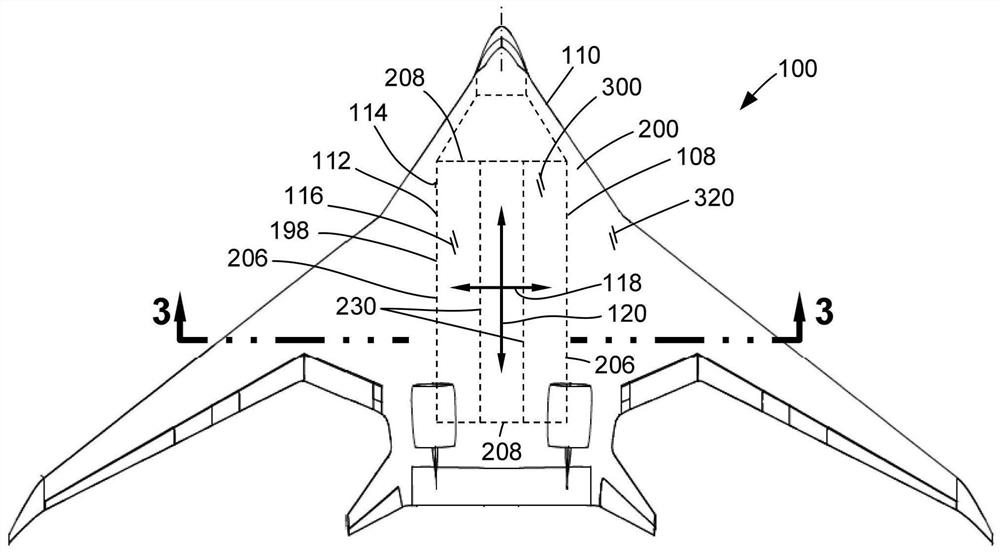
一种航天飞行器
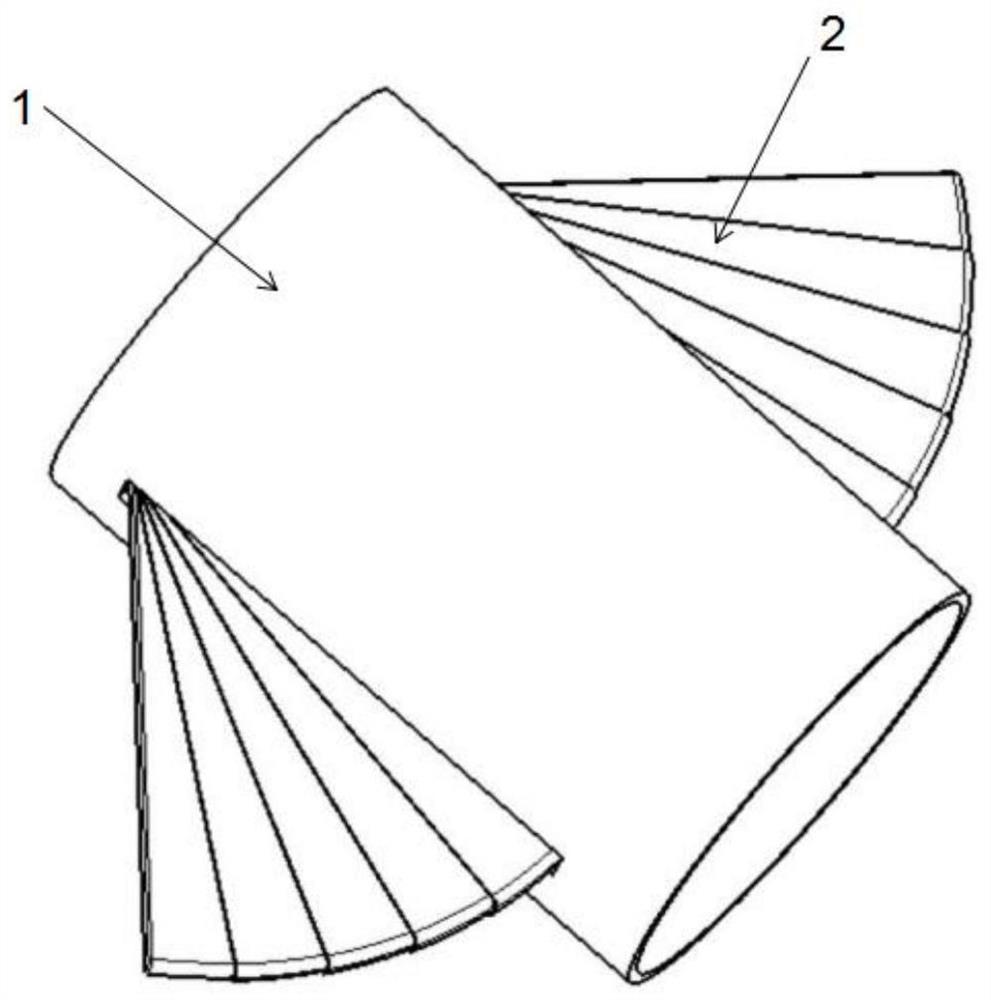
本申请提供一种航天飞行器,包括飞行器机身以及两个可伸缩鸭翼;飞行器机身的两侧对称设有开槽;可伸缩鸭翼包括多个鸭翼分部;鸭翼分部包括平行设置的两块扇形翼面板;两块翼面板的弧形端通过连接板相连接;所有鸭翼分部的翼面板的圆心端共同铰接在一起;相邻的鸭翼分部之间相套接;相邻的鸭翼分部的两个邻近的翼面板之间通过连杆组件相连接;套接在最外部的鸭翼分部固定安装在飞行器机身内;套接在最内部的鸭翼分部与驱动杆相铰接;驱动杆的自由端与驱动可伸缩鸭翼伸出/收回的伺服作动器相铰接;伺服作动器固定安装在飞行器机身内。本申请可以根据根据不同的航天飞行器弹道需求,来调整可伸缩鸭翼伸出的范围,从而实现有效的飞行控制。
2023-08-21 -
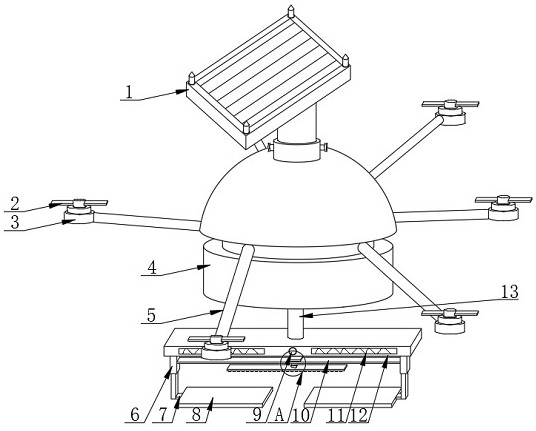
一种平衡结构、物联网控制机构及农业无人机遥感图像采集
装置
本发明涉及图像采集技术领域,公开了一种平衡结构、物联网控制机构及农业无人机遥感图像采集装置,包括机体,还包括与机体无线连接的远程遥控器,机体的中部设置有中心板,且机体的内部位于中心板的两侧分别设置有机仓和控制仓,中心板的正上方设置有图像采集机构,且中心板的正下方对应图像采集机构处设置有平衡机构。本发明通过图像采集机构可以实现摄像机的纵向和横向360拍摄,相比传统调节无人机角度来实现拍摄,本发明的稳定性更高,而且摄像机拍摄的画面角度不会变化,始终保持正视拍摄,另外采用平衡机构的配合,使得无人机的重心始终保持平衡,不易出现晃动或者坠机而影响拍摄的问题。
2023-08-21 -
一种飞机均匀播撒高吸湿性粉体自动化装置
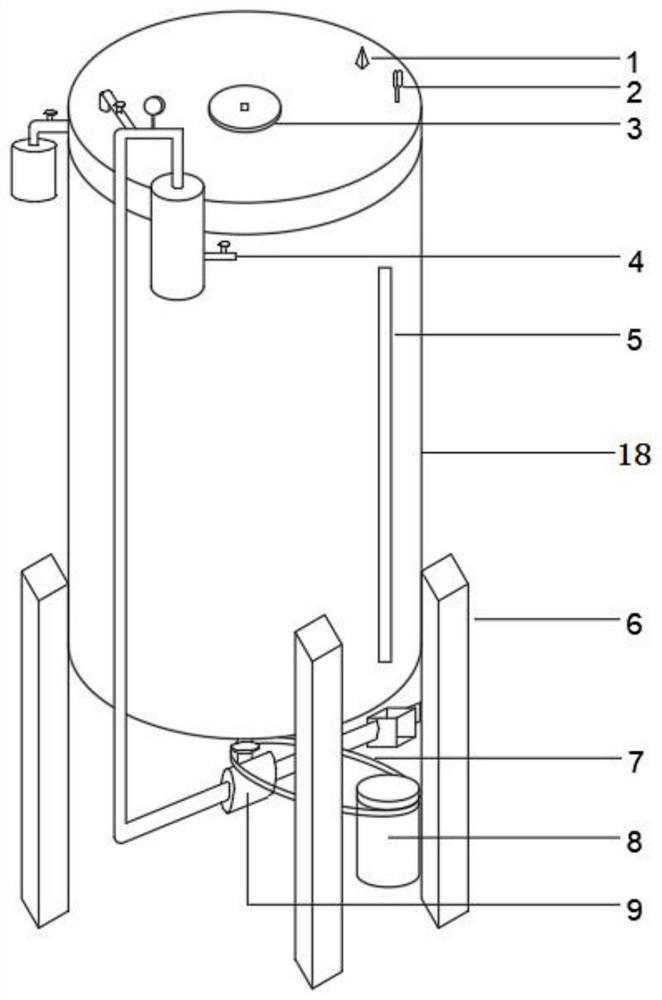
本发明公开了一种飞机均匀播撒高吸湿性粉体自动化装置,飞机均匀播撒高吸湿粉体自动化装置包括罐体,充压系统、流化系统,监测、安全装置;罐体顶部设有进料口,底部有电动360°转动刮板;充压系统包括气流净化室和充压管路,气流净化室输出端通过充压管路与罐体顶端连接;流化系统包括流化室和流化管路,流化室设有两个输入端,一个通过流化管路与气流净化室输出端连接,另一个与罐体内粉体输出端连接,流化室输出端与流量控制器及粉体播撒口连接;监测装置包括红外摄像监控模块和刻度物料观测口,安全装置包括放气阀门和过滤器。本装置采用气力输送的方式使高吸湿性粉体流态化,实现了飞机播撒粉体作业的均匀化、自动化、清洁化、高效化。
2023-08-21 -
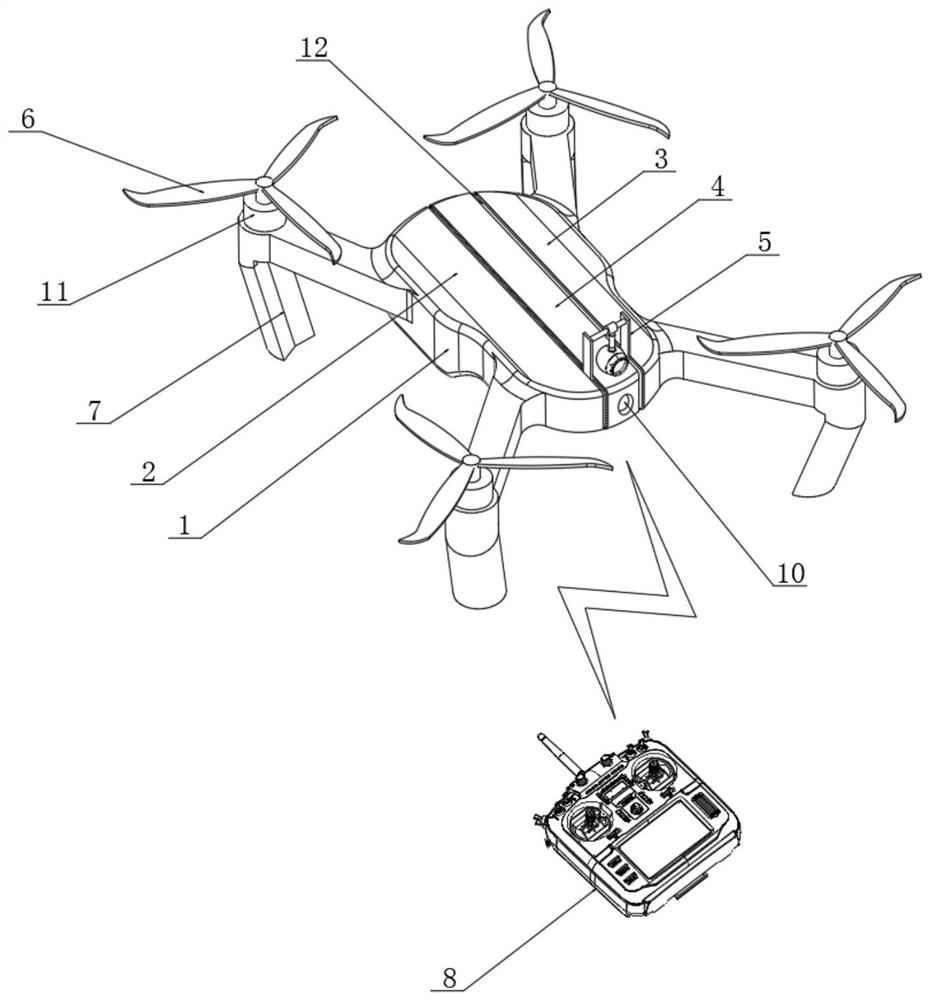
一种快速通信的四旋翼无人机系统
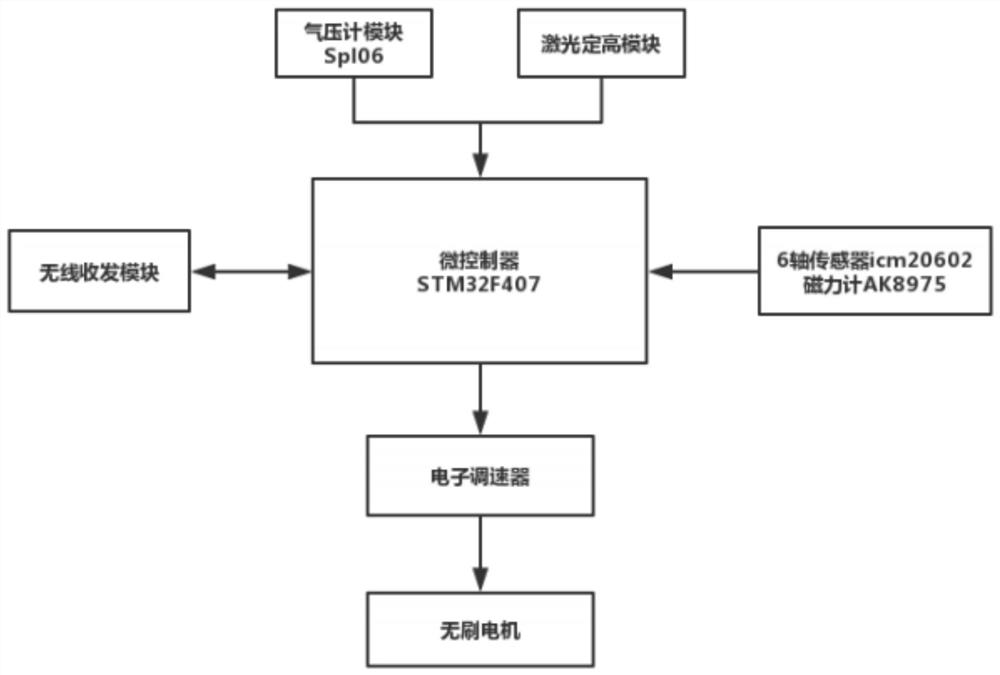
本发明公开了一种快速通信的四旋翼无人机系统,包括微控制器、6轴传感器、磁力计、电子调速器、无刷电机、无线收发模块、气压计模块、激光定高模块;其中微控制器分别连接6轴传感器、磁力计、电子调速器、无刷电机、无线收发模块、气压计模块、激光定高模块,通过无线收发模块连接外部设备,电子调速器连接无刷电机。本发明通过合理的构成及连接搭建了用于快速通信的四旋翼无人机系统平台,该飞控上采用全SPI方式6轴传感器icm20602和spl06气压计,该特定型号产品的配合,使得数据读取波特率达到了10M每秒,以至四旋翼无人机系统在噪声、零点漂移等性能都有提升,节省了大量时间。
2023-08-21 -
自旋飞行体翼片延时释放装置
本发明提供了一种自旋飞行体翼片延时释放装置,包括:圆筒形翼座,其沿轴向套设在所述旋转飞行体外部,并可相对所述旋转飞行体旋转;至少第一翼片和第二翼片,所述第一翼片、第二翼片安装在所述翼座上,并可相对所述翼座处于折叠状态和展开状态;锁紧机构,用于将所述翼片相对所述翼座锁定在折叠状态;推杆机构,用于驱动所述锁紧机构动作以解除锁紧机构对所述翼片的锁定;以及翼片自弹定位机构,用于在所述推杆机构解除所述锁紧机构对所述翼片的锁定时,驱动所述翼片由折叠状态旋转至展开状态,并将所述翼片相对所述翼座锁定在展开状态。本发明具有结构简单、紧凑的特点,能够有效解决旋转飞行体与升力翼片之间有相对转动情况下的翼片作动问题。
2023-08-21 -
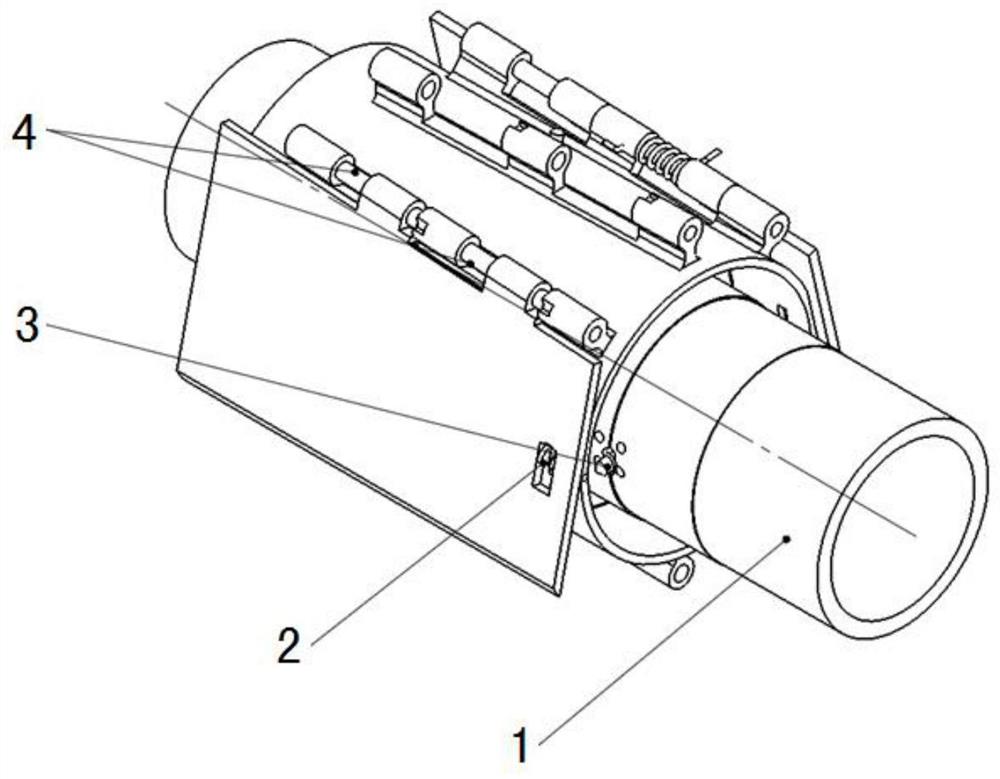
一种基于四旋翼飞行器的巡线机器人
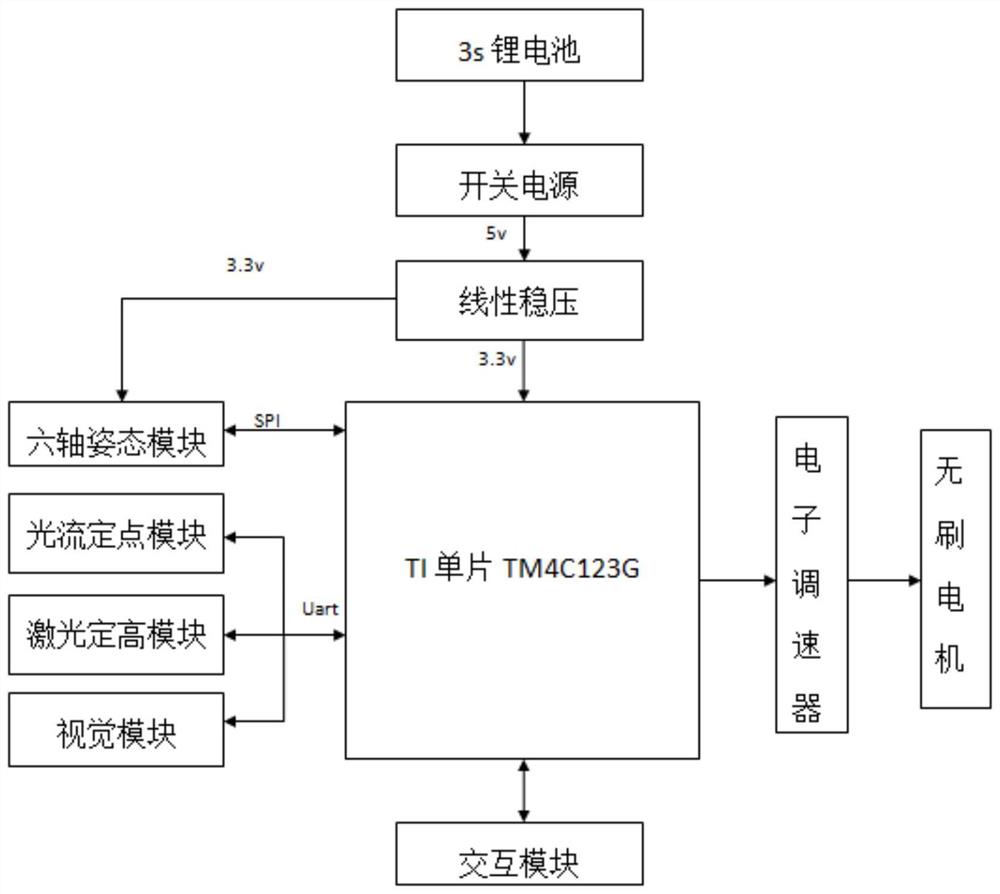
本发明公开了一种基于四旋翼飞行器的巡线机器人,包括供电模块、开关电源、线性稳压器、TI单片机、六轴姿态模块、光流定点模块、激光定高模块、视觉模块、电子调速器、无刷电机。本发明采用激光测距+光流定位,而激光单色性好、方向性强,以激光器作为光源进行测距,可显著减小重量和功耗,提高测距精度;利用光流测速再积分定位,可在室内实现对飞行器的高精度定位,整个系统能够巡检电力线路及杆塔状态,发现异常时拍摄存储,任务结束传送到地面装置上显示。
2023-08-21 -
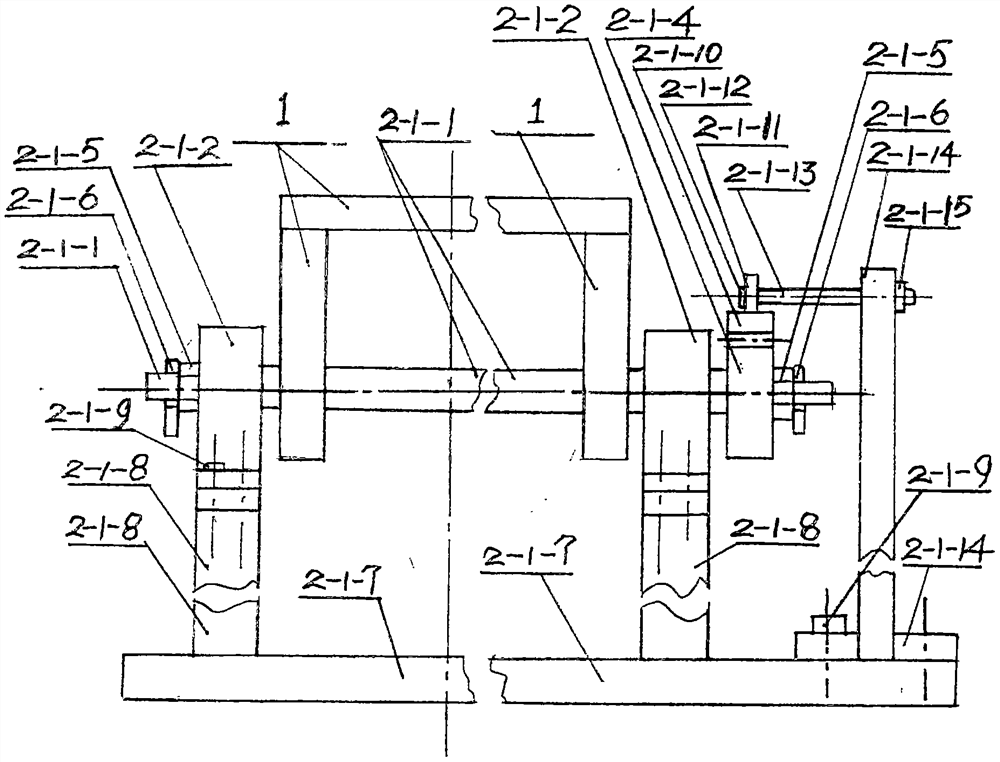
可变幅式推力器
本发明公开了一种底座(1)、转动动力部分(2)、水平转动部分(3)的可变幅式推力器,底座(1)安在轴(2‑1‑1)上,支承轴(2‑1‑1)的轴承座总成(2‑1‑2)安在凸台(2‑1‑8)上,凸台(2‑1‑8)安在固定座(2‑1‑7)上,转动动力总成(2‑2)可以推动轴(2‑1‑1)转动;在固定座(2‑1‑7)与座子(3‑1‑1)之间有滚珠(3‑1‑2),固定座(2‑1‑7)在油马达(3‑2‑1)以及其它零件作用下,可以空间转动。采用以上方法后,推力器不仅可以向前方发出推力,同时,也可以在空间任意方向上产生推力,从而使推力器功能有所的情况下,结构简单,成本不高。
2023-08-21 -
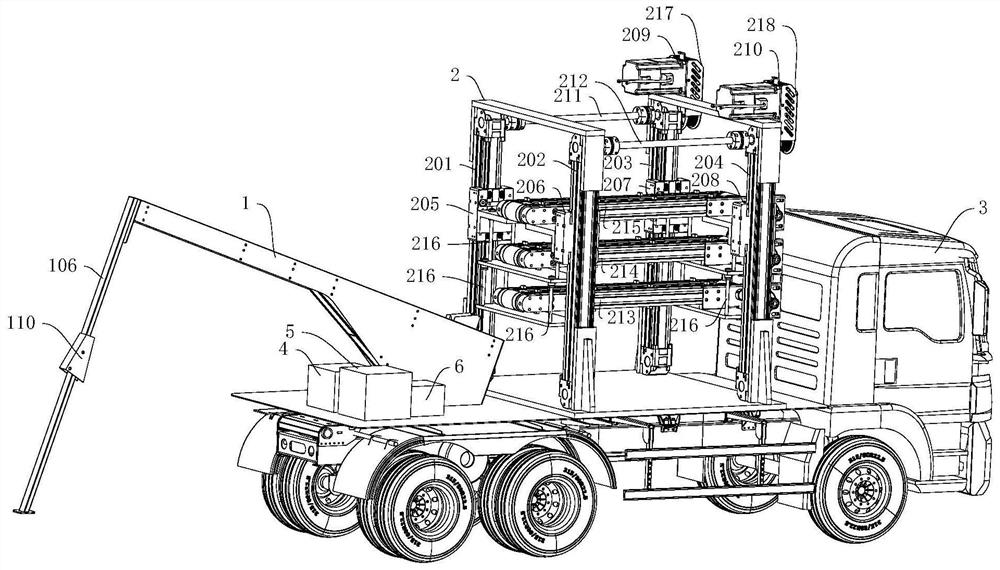
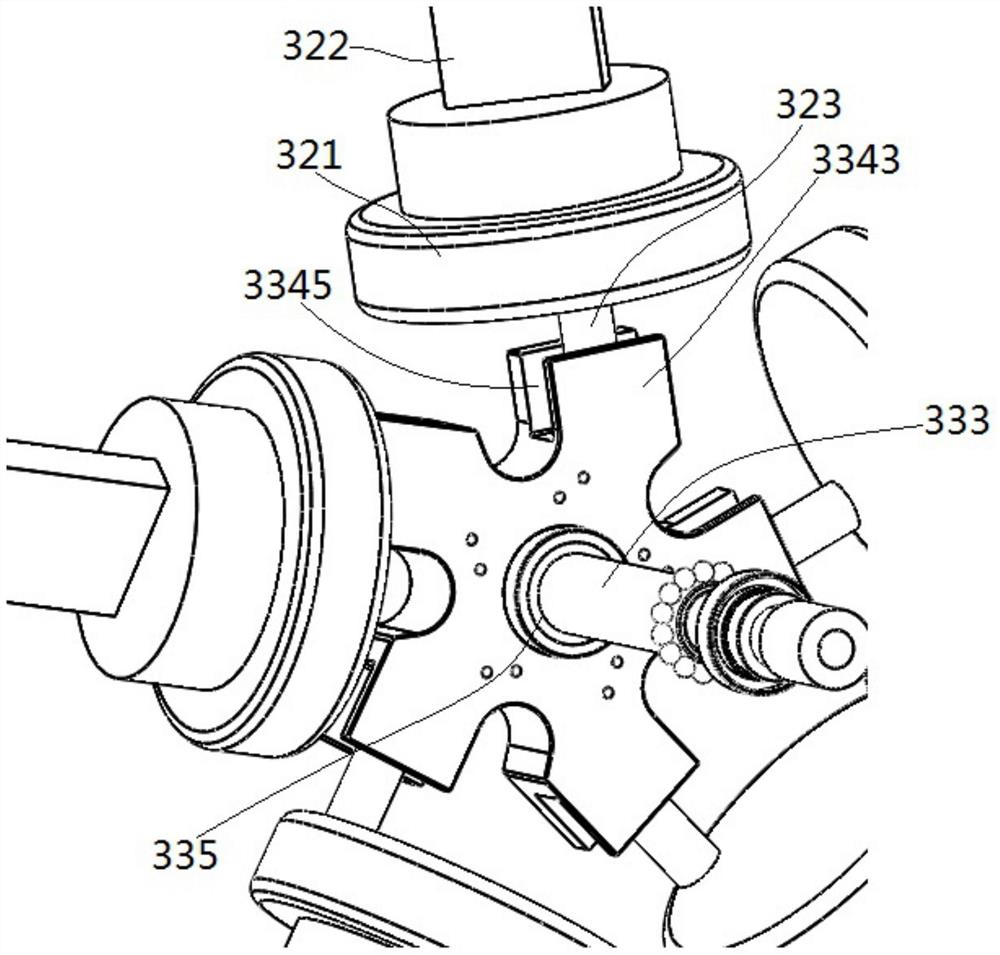
一种挂弹车用浮动调整平台
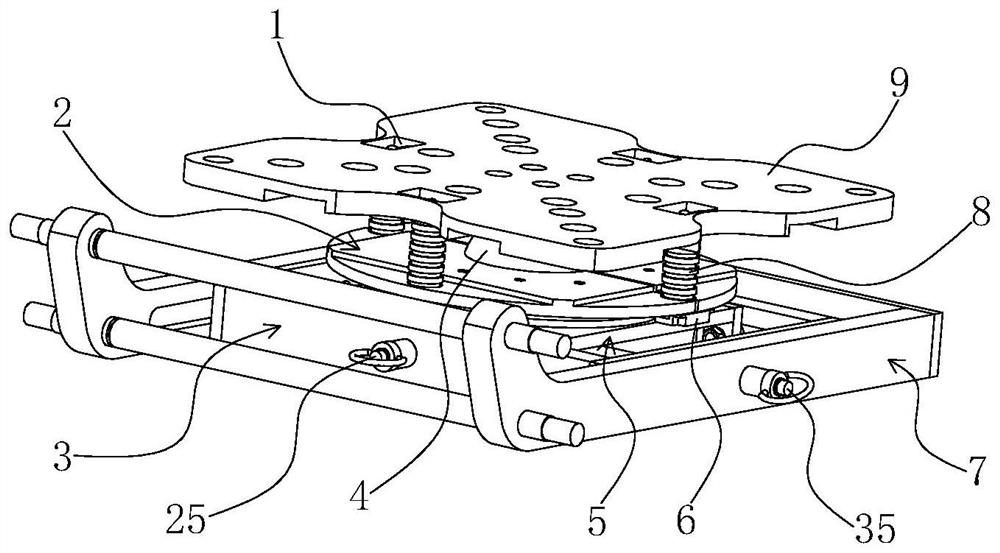
本发明公开了一种挂弹车用浮动调整平台,其包括底座,所述底座上滑动设有纵移框架,所述纵移框架上滑动设有横移框架,所述横移框架上转动设有中心轴,所述中心轴的上端面设有球槽,所述球槽内安装有球头轴的球头,所述中心轴的上端面上固定设有限位板,所述限位板上开设有供球头轴的杆部穿过的通孔,所述球头轴的杆部固定设于浮动平板上,所述限位板与浮动平板之间连接有拉簧。其目的是为了提供一种挂弹车用浮动调整平台,其适用于挂装250㎏以下的飞机外悬挂物,能够完成柔性而低矮的挂装,效率高且结构简单。
2023-08-21 -
一种可变角度扇叶舵面的无人机姿态控制系统
本发明公开了一种可变角度扇叶舵面的无人机姿态控制系统,包括主体及其两侧设置的舵面系统,所述主体包括碳纤维基座、无刷电机和旋翼,所述舵面系统包括支架、舵面组、连杆和舵机机构,本发明涉及飞行器姿态控制技术领域。该可变角度扇叶舵面的无人机姿态控制系统,较变桨距调节相比结构简单,轴向尺寸小,生产和维修难度与成本低;抑制了抖舵对系统稳定性带来的干扰,较矢量调节相比稳定性和快速性好,且对舵机输出力矩要求不高,即小舵机即可实现控制,减轻重量;较滑流舵调节相比调节效果强且迎风面小,抗干扰能力更强;实现了固定双旋翼的高效稳定的控制,且灵活性更高,稳定性更好,更适用于VTOL和STOVL飞行器的起降控制。
2023-08-21 -
一种气流辅助控制的微涡流发生装置
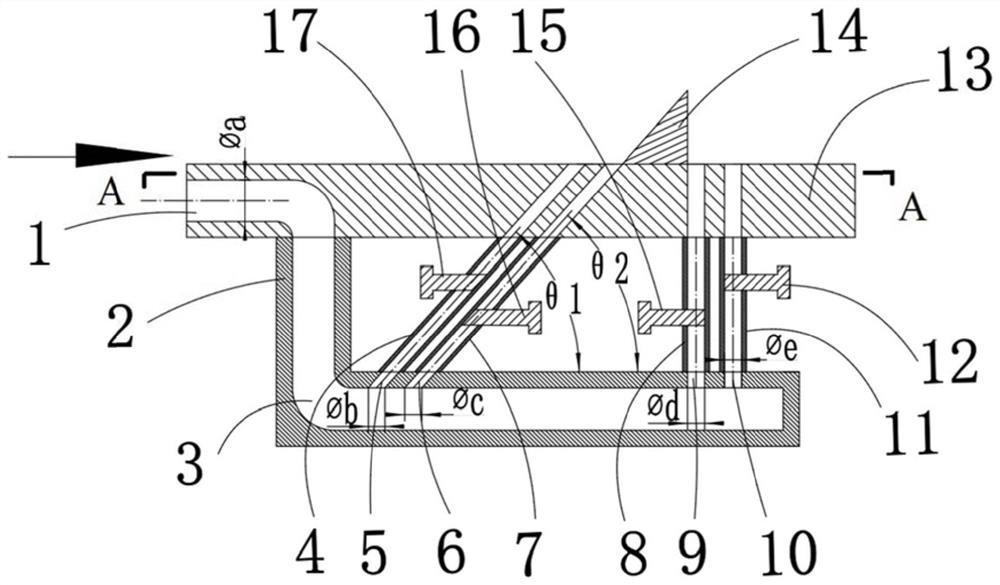
一种气流辅助控制的微涡流发生装置,主要包括高压供气路、气流辅助控制装置、微涡流发生器(14)、超声速被控面(13),气流通过气流辅助控制装置,由高压供气路进入,并在超声速被控面形成与微涡发生器几何相似的气动构型,通过控制电磁阀,可以改变此气动构型,能够通过气流辅助提高了微涡流发生器的控制效果,同时极大限度的拓宽了微涡流发生器的适用工况。
2023-08-21 -
用于无人机自动拾取包裹的方法
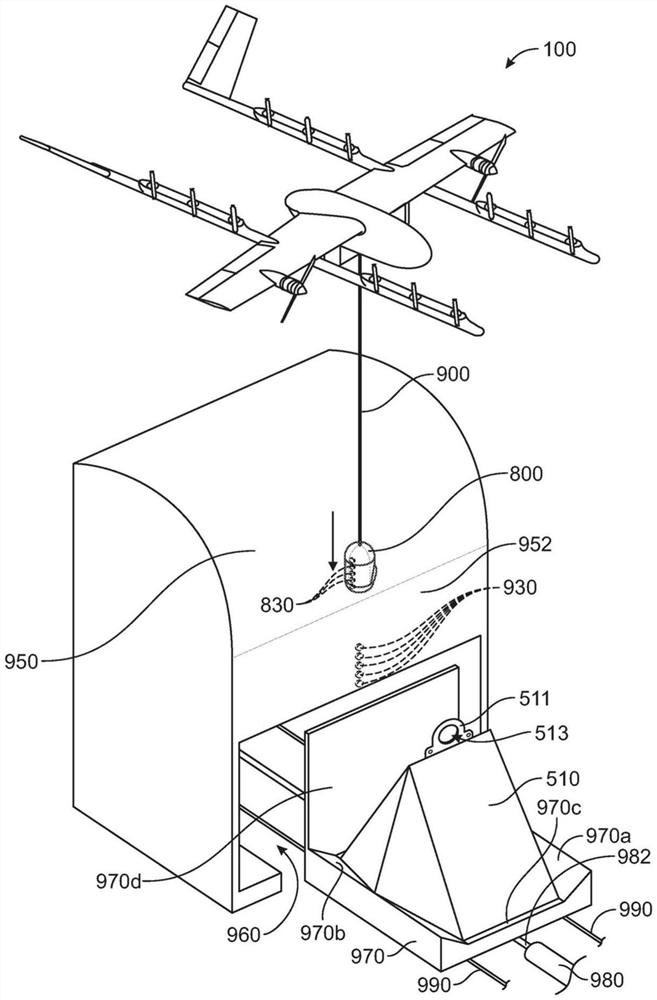
一种运载物取回装置(950)包括:具有面向外部分(952)的结构;适于在其上放置运载物(510)的运载物支撑构件(970);位于所述结构的面向外部分(952)上或内的一个或更多个磁体(930)或金属,适于磁性接合位于运载物取回器(800)上的一个或更多个磁体(830)或金属,该运载物取回器(800)附接到从UAV(100)悬挂的系绳(900),其中当运载物(510)被放置在运载物支撑部件(970)上时,运载物支撑部件可移动以将运载物的把手(511)定位得邻近在所述结构的面向外部分(952)上或内的一个或更多个磁体(930)或金属。
2023-08-21 -
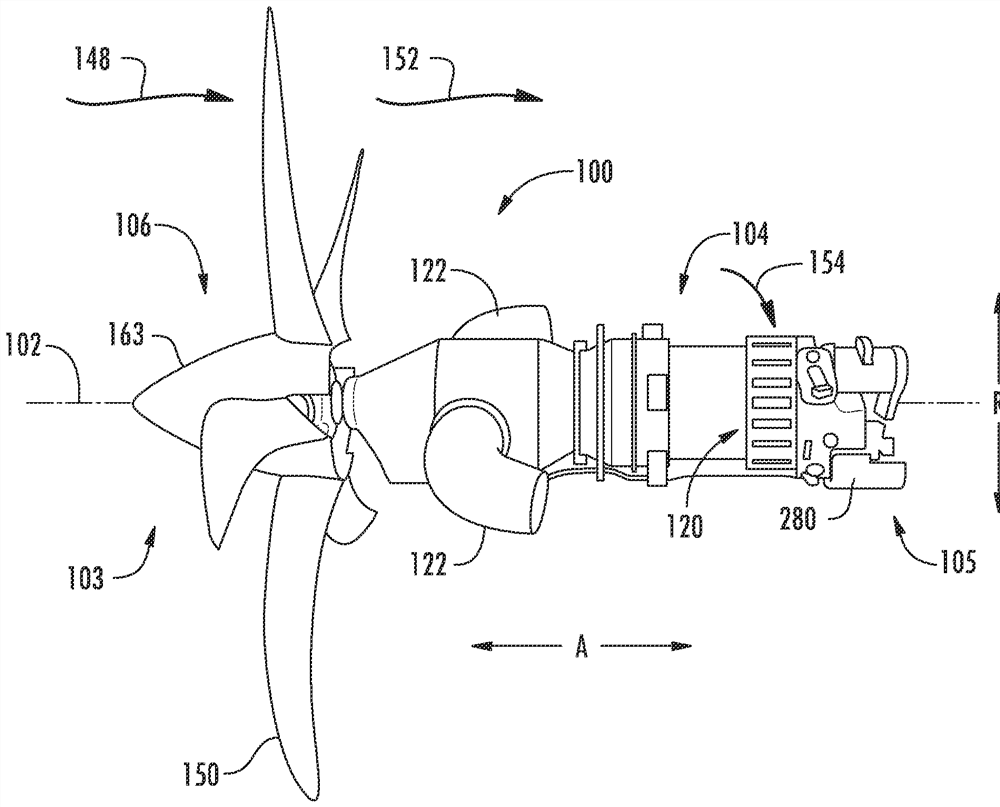
螺旋桨组件和桨距控制单元
提供一种与发动机可操作地联接的可变桨距螺旋桨组件和用于控制该可变桨距螺旋桨组件的多个螺旋桨叶片的桨距的方法。在一个示例方面,可变桨距螺旋桨组件包括用于将超速、顺桨和反桨功能性结合在单个副控制阀中的特征。副控制阀可操作来选择性地允许受控量的液压流体流到或流出变桨促动组件,使得螺旋桨叶片的桨距可被调节以在恒速模式、顺桨模式和反桨模式中的一种模式下操作可变桨距螺旋桨组件。
2023-08-21 -
一种用于钻爆法施工隧道工作面检测装置及方法
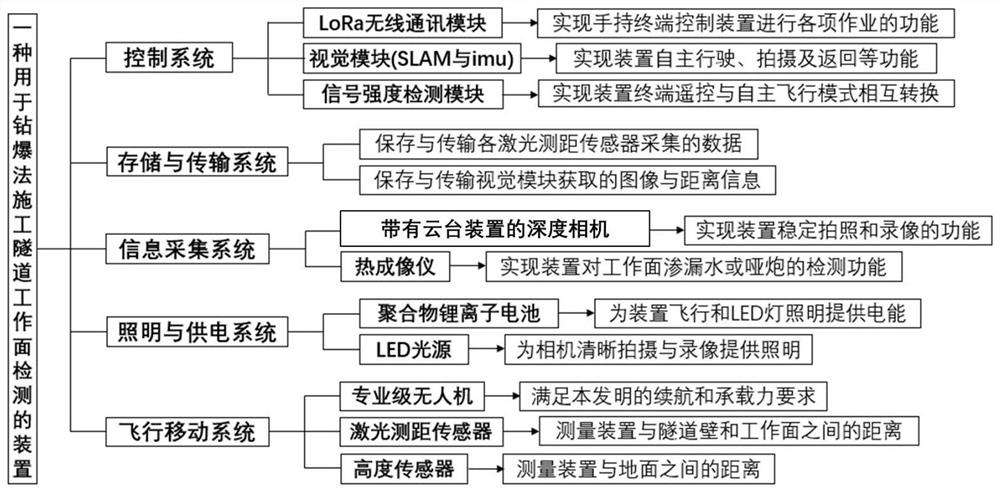
本发明涉及一种用于钻爆法施工隧道的工作面检测装置及方法。所述工作面检测装置包括:控制系统、存储与传输系统、信息采集系统、照明与供电系统以及无人机;所述控制系统包括远距离无线电LoRa无线通讯模块、视觉模块以及信号强度检测模块;所述信号强度检测模块分别与所述LoRa无线通讯模块以及所述视觉模块相连接;所述信号强度检测模块用于检测无线通讯信号的强度,实现远程控制模式与自主作业模式之间的切换。采用本发明所提供的工作面检测装置及方法能够提高检查效率以及安全性。
2023-08-21 -
具有基本平坦的面板的压力容器
本发明涉及一种具有基本平坦的面板的压力容器。压力容器包括彼此间隔开的至少一对侧隔壁。此外,压力容器包括至少一个基本平坦的面板,该面板具有在该对侧隔壁之间延伸并且非接触地邻近侧隔壁的至少一个面板跨部。面板和侧隔壁共同地形成围成压力容器的结构组件的至少一部分。压力容器还包括多个面板支架,该多个面板支架在沿着面板跨部分布的多个面板附接节点处将侧隔壁联接到面板。面板支架中的至少两个面板支架具有不同的轴向刚度,该不同的轴向刚度被构造成在压力容器的内部加压期间当面板经受平面外压力载荷时,导致面板附接节点向外偏转基本相等的偏转量。
2023-08-21 -
飞行器的空气管理系统、供应加压空气的方法和飞行器
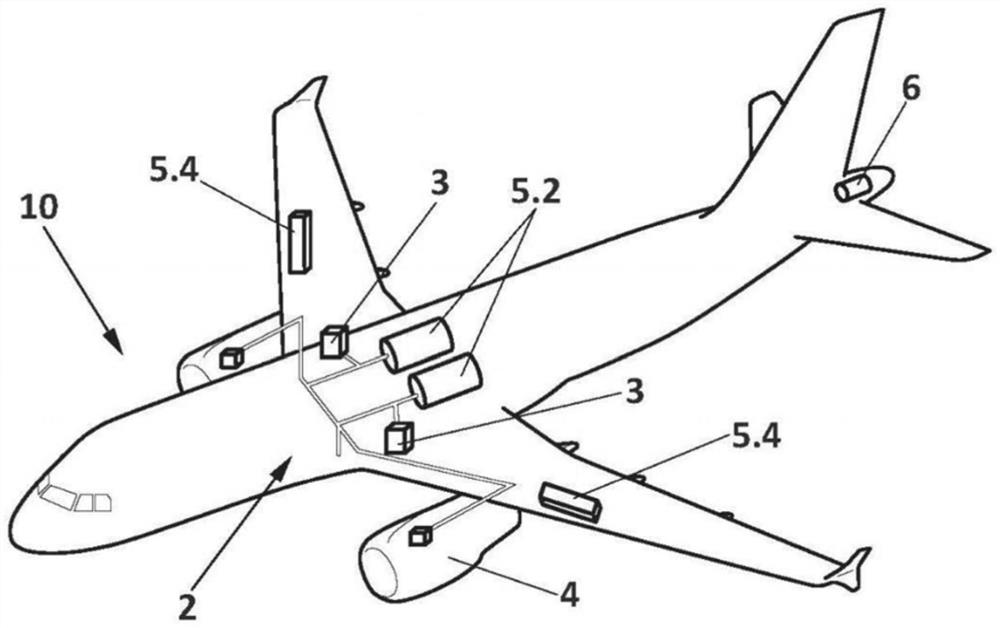
本发明提供了一种具有一组压缩空气源的、用于向空气消耗装备供应加压空气的飞行器的空气管理系统、供应加压空气的方法和飞行器。特别地,根据所述飞行器操作条件,空气泄放系统、电动压缩机或它们的组合可以执行这种压缩空气供应。
2023-08-21 -
供应加压空气的安装件和方法、涡轮风扇发动机及飞行器
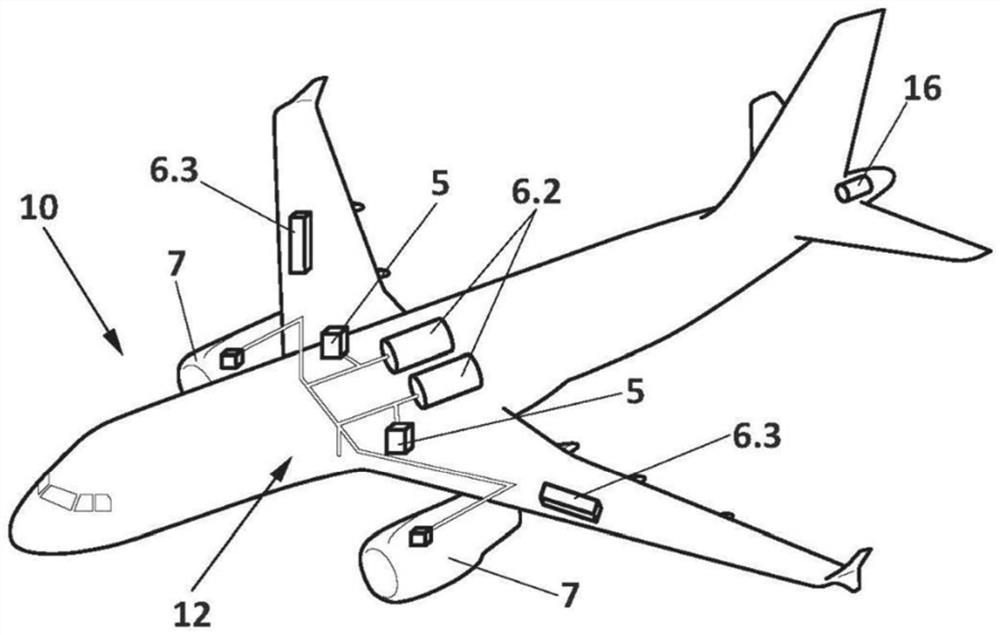
本发明提供了一种具有不同压缩空气源的、用于向空气消耗装备供应压缩空气的飞行器气动系统的飞行器安装件。根据飞行器操作条件(例如飞行高度或特定飞行阶段),空气泄放系统、电动压缩机或它们的组合可以执行这种压缩空气供应。而且,本发明提供了一种涡轮风扇发动机和一种用于向空气消耗装备供应压缩空气的方法及飞行器。
2023-08-21 -
一种基于无人机的自动探测装置
本发明属于无人机技术领域,尤其是一种基于无人机的自动探测装置,包括无人机,无人机的下端固定连接有固定盘,固定盘的下端固定连接有固定架,固定架的一侧上固定连接有橡胶垫,固定盘的下端设有防震盒,防震盒位于两个固定架之间,固定盘的下端开设有凹槽,防震盒的上端开设有凹槽,凹槽内固定连接有电性磁铁,防震盒内开设有空腔,空腔位于两个凹槽之间,空腔的内底面上固定连接有压缩弹簧,置物平台与支撑盒固定连接。通过无人机使用电性磁铁固定住防震盒,将防震盒携带至制高点,当电性磁铁失去磁力时,在压缩弹簧的作用下,置物平台被弹起,胶水箱内的胶水从薄膜塑料片的破口处流出,使得防震盒粘在制高点上。
2023-08-21 -
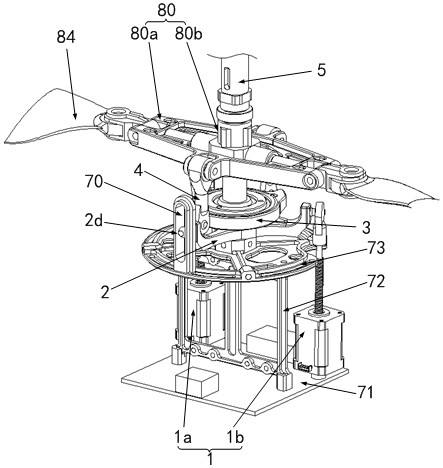
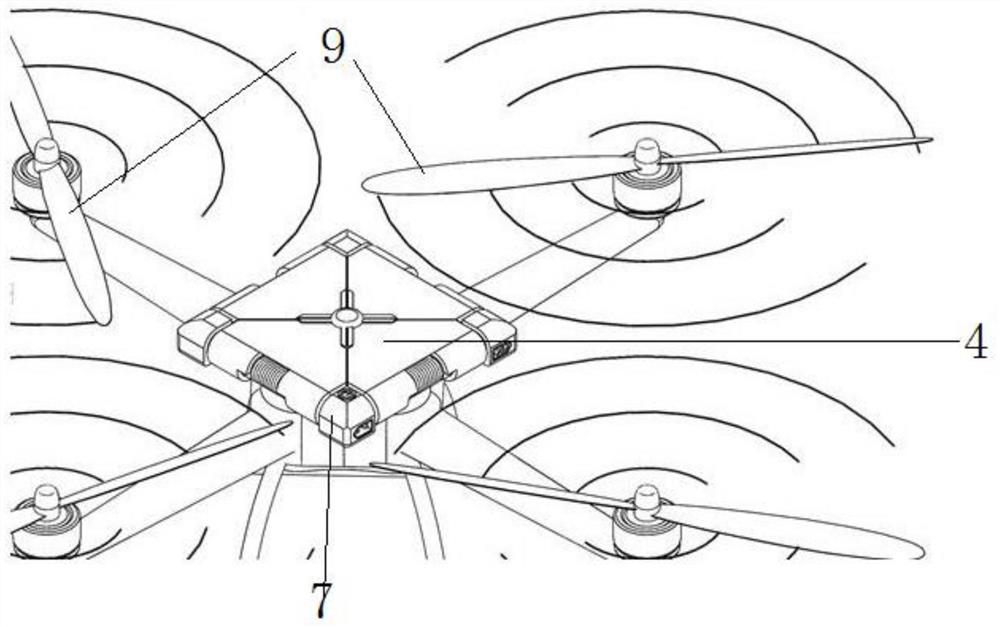
一种无人机及其十字盘机构和控制方法
本发明涉及航空技术领域,公开了一种无人机及其十字盘机构和控制方法,该无人机十字盘机构中:外环与机架铰接,绕第一轴线转动;内环套设在外环内且与其铰接,内环绕第二轴线转动,第二轴线与第一轴线垂直;第一直线电机中,第一电机本体与机架铰接,第一推杆与内环上的内环驱动连接点连接;第二直线电机中,第二电机本体与机架铰接,第二推杆与外环上的外环驱动连接点连接。动力装置的中心轴线偏转时:先确定动力装置的中心轴线拟达到的方向角ψ和该中心轴线相对于初始平面的倾斜角θ,并沿第一轴线方向和第二轴线方向对θ进行分解,将其分解为θ和θ,sinθ=sinθ×cosψ,sinθ=sinθ×sinψ,随后将θ和θ转化为两个直线电机的行程指令。本发明的驱动方式简单直接、精准度较高。
2023-08-21 -
一种用于无人机的变距装置、变距控制方法及无人机
本发明公开了一种用于无人机的变距装置、变距控制方法及无人机,包括驱动器、固定环、旋转环和变距拉杆;驱动器包括第一直线电机和第二直线电机;固定环套设在螺旋桨转轴上且与螺旋桨转轴球铰连接;固定环上设置有第一连接支座、第二连接支座和第三连接支座;第一直线电机连接于第一连接支座与机架之间;第二直线电机连接于第二连接支座与机架之间;第三连接支座与机架滑动配合;旋转环以定轴转动的方式套设在固定环上;变距拉杆用于连接桨毂和旋转环。该变距装置仅需控制两个直线电机的推杆伸缩即可实现周期性变距,驱动方式和控制逻辑得到大幅的简化,同时周期性变距能够降低环境风向的影响,大大提升变距的稳定性。
2023-08-21 -
一种高空救援无人机的减震装置及使用方法
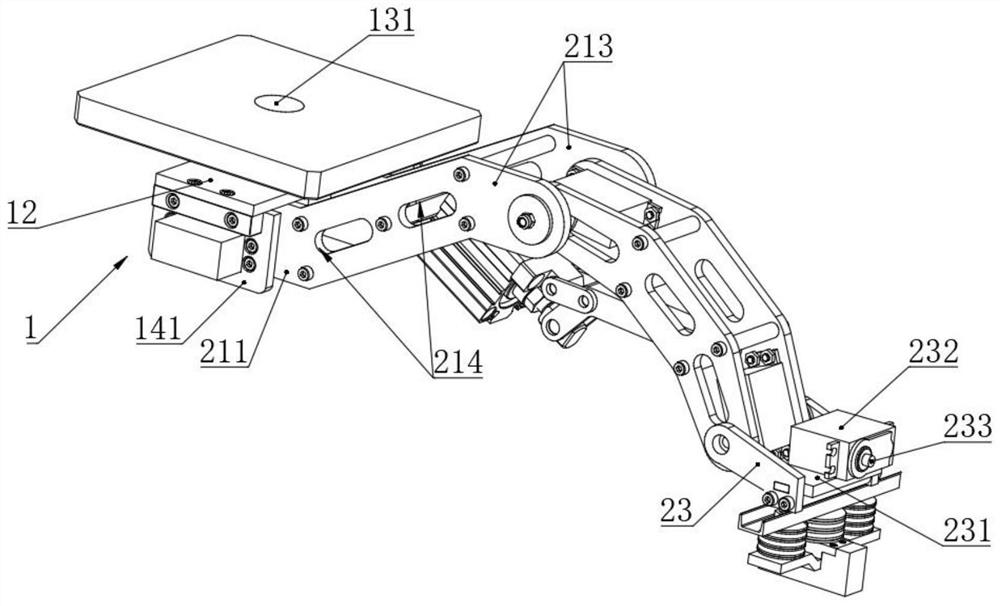
本发明属于无人机技术领域,具体涉及一种高空救援无人机的减震装置,包括旋转座、活动臂组件、减震结构和缓冲结构,旋转座安装于无人机底部;活动臂组件包括第一活动臂、第二活动臂和第三活动臂;本发明的减震装置能够在落地前调整地面接触位置,保证高空救援无人机稳定可靠地降落到地面上,同时采用缓冲结构和减震结构两次进行减震处理,减震效果明显,适用于高负载情况下的高空救援无人机。本发明还提供了该减震装置的使用方法,包括减震装置的安装、水平位置调节、减震装置姿态调节和缓冲及地形适应等步骤,本发明的方法操作方便,能够克服高空救援无人机在野外降落时,地面不平整导致侧翻等问题。
2023-08-21 -
一种定位捕鱼的无人机及使用方法
本发明属于无人机捕鱼技术领域,具体涉及一种定位捕鱼的无人机,包括弹射收网组件、追踪渔网组件、旋转体组件、无人机主体和红外探测器组件,所述弹射收网组件固定连接于旋转体组件下部,所述所述旋转体组件固定连接于无人机主体下部;所述弹射收网组件包括第一框体、第一杠杆、第二弹簧、第三弹簧、第一推块和第一卡块。本发明解决了现有技术抛网姿态不佳和效率不高,且不能实现渔网完全散开;无法实现自动化捕鱼,无法瞒住日益增长的自动化需求;无法对鱼群位置定位和追踪,捕鱼效率低等问题。本发明的使用方法简单便捷,便于操作人员操作,操作人员可以快速掌握操作方法,从而降低了人力成本低,同时保证了工作人员的工作安全。
2023-08-21 -
一种带减震装置的高空救援无人机及使用方法
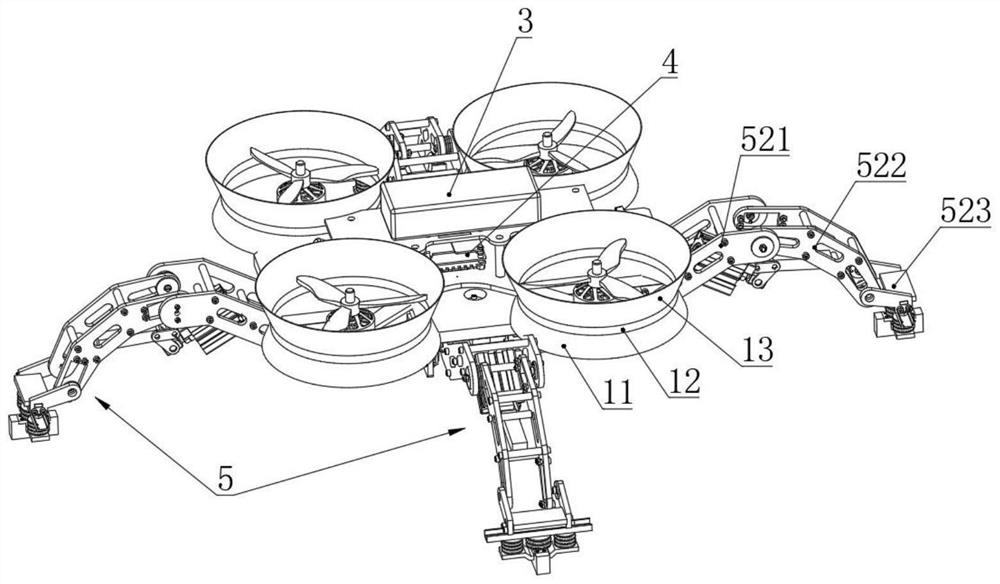
本发明属于无人机技术领域,具体涉及一种带减震装置的高空救援无人机,包括数个飞行系统、机架、平衡系统、控制调节系统、四个减震装置和视频采集系统,数个所述飞行系统均匀地安装在机架侧边,所述平衡系统、控制调节系统和视频采集系统均安装在所述机架上,本发明的无人机在救援后高负重的情况下,落地时的减震效果可靠且有效;并且能够在减震后,快速地将无人机的机身调整到水平姿态。本发明还提供了该无人机的使用方法,包括无人机控制、降落地点选择、第一次减震和第二次减震等步骤,本发明的方法自动化程度高,操作人员仅需人工控制无人机的降落地点,操作难度低,本发明的方法可操作性强。
2023-08-21 -
一种城市救援用无人机及其使用方法
本发明属于无人机技术领域,具体涉及一种城市救援用无人机,包括两个飞行器、救援网、连接装置和两个固定装置,固定装置包括动力单元、支撑单元、钻杆和膨胀螺栓,救援工作时,支撑单元前端嵌入高楼外墙表面,钻杆通过动力单元在高楼外墙表面钻出钻孔,膨胀螺栓前端通过动力单元置于钻孔中;本发明的无人机能够在紧靠高楼外墙的条件下对高空待救援人员进行救援,同时能够将救援网快速牢固地固定在高楼外墙,确保待救援人员的安全。本发明还提供了该无人机的使用方法,包括准备工序、钻孔、固定和保护救援等步骤;本发明的方法操作方便,简单易懂,标准体重的成年男性从10米高度掉落到救援网中,膨胀螺栓不会从高楼外墙脱落,实用性和安全性高。
2023-08-21 -
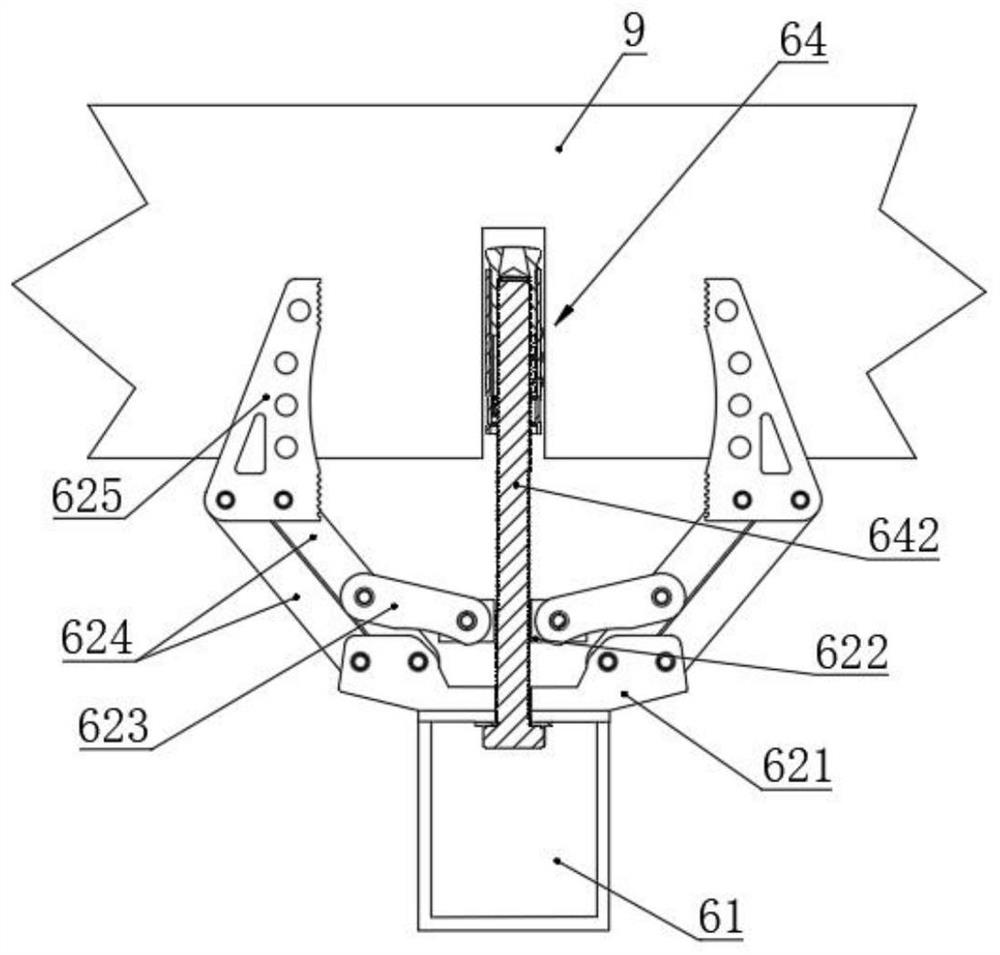
一种太阳能新型军用无人机
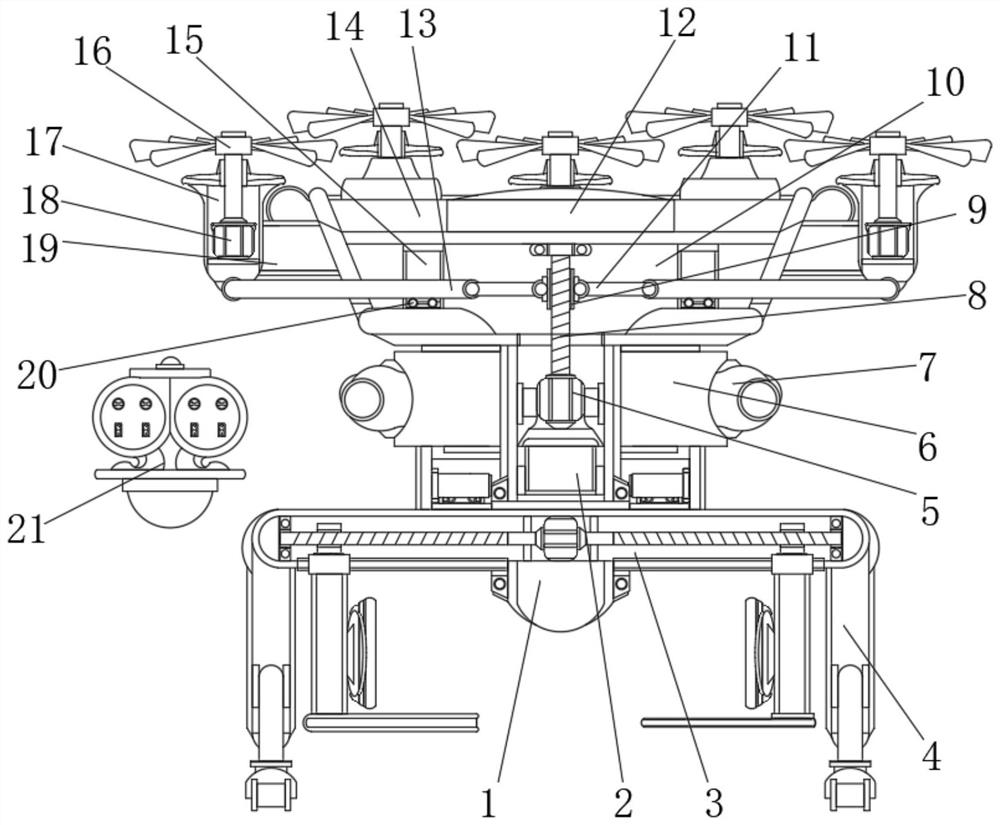
本发明公开了一种太阳能新型军用无人机,包括安装柱和控制器,所述安装柱内部的中间位置处设有伺服电机B,所述安装柱内部的顶部设有伺服电机B,所述安装柱内部的底部设有蓄电池,所述安装柱的顶部设有相互连接的安装槽,所述安装柱外侧的顶部设有固定环,所述固定环的外侧设有四组全方位摄像头。本发明通过夹持运输组件的相互配合,使无人机得以对物资进行夹持固定,并进行飞行运输,同时该机体搭载有固定环和全方位摄像头,使机体的观察视野更加宽阔,更加方便的对机体进行操控,并且该夹持运输组件可以与无人机体进行拆卸分离,以便于根据实际使用需求进行改变,增加装置的功能性和灵活性。
2023-08-21 -
一种飞行器安全降落保护球
本发明提供一种飞行器安全降落保护球,包括保护球本体,所述保护球本体包括安装座和智能系统,所述智能系统包括红外线感应器、控制箱、智能处理器、控制开关、供电装置、直流电机、电动推杆一和电动推杆二,所述安装座上安装有活动板,所述活动板通过固定轴安装在安装座上,所述活动板上开有凹槽,所述凹槽的内部放置有空心橡胶球,所述红外线感应器安装在活动板的一端,该飞行器安全降落保护球通过红外线感应器对飞行器的位置进行检测,通过智能处理器控制电机旋转,使电动推杆二的方向进行改变,电动推杆二通过活动杆对安装座的位置进行左右微调,从而根据飞行器的位置进行调整使用,功能多样。
2023-08-21 -
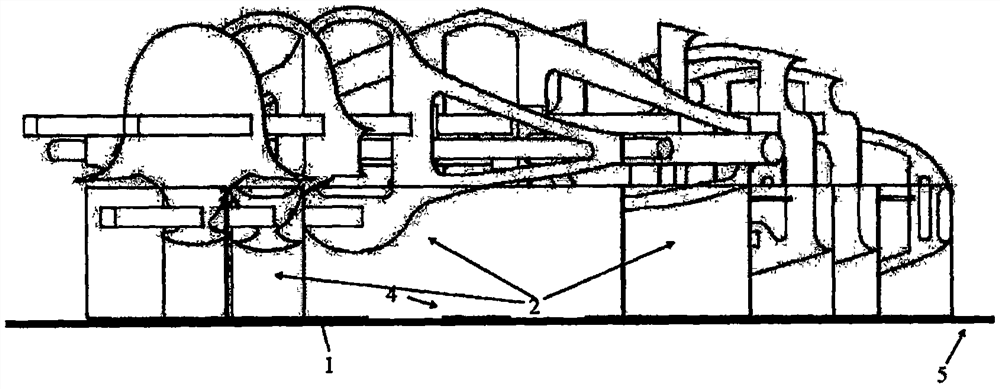
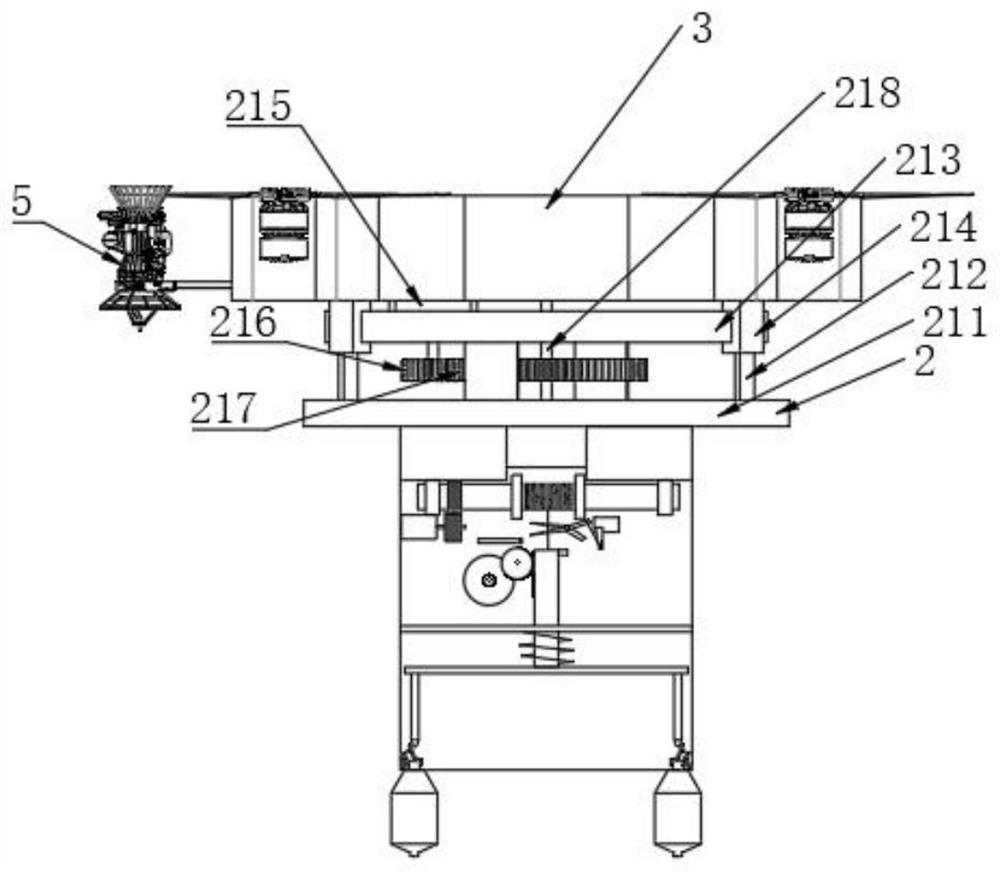
基于Clap-Fling机制的可悬停双扑翼飞行器
本发明公开一种基于Clap‑Fling机制的可悬停的双扑翼飞行器,进一步提高扑翼微型飞行器的扑动效率,更好的利用昆虫高升力机理中的Clap‑Fling机制,设计了一种曲柄滑块机构,并基于该机构对微型扑翼飞行器进行了整体设计。本发明飞行器由一对曲柄滑块扑翼机构组成,对称分布在主机架两侧。单侧曲柄滑块扑翼机构由机架、减速齿轮组、曲柄、连杆、滑块与摇杆组成。与现有技术相比使用曲柄滑块机构进行设计,传动时动力大、效率高,机构可靠性高,在一个扑动周期内,能够完成四次完整的Clap‑Fling机制,使其获得更大的升力,提高飞行效率;且整体结构紧凑、体积小巧、重量轻便,以实现垂直起降、空中悬停、俯仰、偏航、滚转、倒飞等多种飞行运动。
2023-08-21 -
一种弹射无人机自动解锁装置
本发明公开了一种弹射无人机自动解锁装置,具体为无人机领域,包括弹射架和第二重锤,所述弹射架顶部的一侧活动套装有弹射小车,所述弹射小车的顶部固定安装有飞机托架,所述飞机托架的顶部固定套装有解锁机构,所述解锁机构的顶部固定安装有机体,所述解锁机构顶部的一侧固定安装有凸轮盘。本发明通过设置了滑动小车机构,在将无人机部署在弹射架上时,由于没有很好的防滑稳固机构,且无人机的重量较重,使得在弹射起飞时,无人机在弹射架释放前非预期地滑出机架,造成损伤,此时利用滑动小车机构,在弹射架释放前,将无人机锁固在滑动小车的机架上,防止无人机在弹射架释放前非预期地滑出机架,造成损伤。
2023-08-21 -
一种基于互联网的载物无人机
本发明公开了一种基于互联网的载物无人机,包括上连接板、下连接板和盒体,下连接板底部固定连接有连接柱,连接柱远离所述下连接板的一端与盒体顶部固定连接,盒体顶部安装有可以减少无人机飞行时物品挂载结构所受空气阻力的吸气装置,本发明在进行使用时,通过整体的挂载结构的流线型可以大大的减少受到风力的影响,同时在挂载结构顶部的顶部设有吸气装置可以将大部分流过挂载结构盒体的气体通过吸气装置吸入吸气泵并排出到吸气泵后,大大减少了整体的阻力,最后盒体和连接板之间设置有减震层可以大大的增加整体的稳定性,防止因为颠簸对于整体的损坏以及影响。
2023-08-21 -
一种基于缝翼凹腔波纹壁的飞机机翼降噪结构
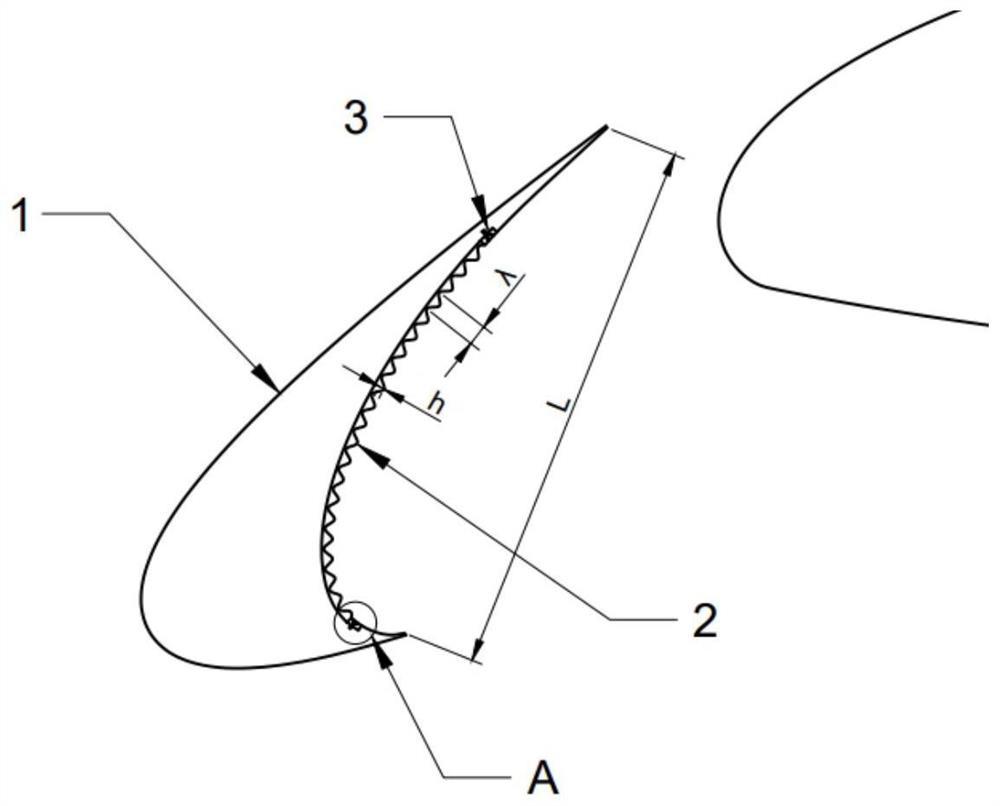
本发明公开一种基于缝翼凹腔波纹壁的飞机机翼降噪结构,包括可展开的前缘缝翼本体、主翼和后缘襟翼,在可展开的前缘缝翼本体内部的回收位置和可展开的前缘缝翼本体外部的展开位置至少安装一个凹腔波纹壁元件,凹腔波纹壁元件为降噪弧形波纹壁板。优化后的元件称为基频波纹壁元件,能够促使低频大尺度涡脉动快速演化为非常容易耗散的高频小尺度涡流动结构。通过基频波纹壁元件的附加作用,削弱前缘缝翼主声源区的旋涡流动,抑制噪声辐射,本发明不会对增升装置的气动性能和大型客机安全性产生影响,且在工程应用上便于实现和维护。
2023-08-21 -
一种开伞和停桨紧耦合的无人机智能降落伞装置
本发明专利属于无人机设备技术领域,具体涉及一种开伞和停桨紧耦合的无人机智能降落伞装置,相比现有技术,本发明的开伞和停桨紧耦合的无人机智能降落伞装置(1)螺旋桨急停及降落伞开伞控制一体化,强力的耦合了降落伞开伞及螺旋桨急停两个动作,使两者互为因果关系,完全契合无人机降落伞开伞即需停桨、停桨即需开伞的工作原理,提高了降落伞安全装置的稳定性;(2)兼备机载设备供电控制,在降落伞弹出时可同步断开机载设备电源,避免了机载设备在伞降过程中不稳定环境下工作的损坏,并进一步加强了对失控螺旋桨的急停能力,提高降落伞系统的工作稳定性,也用于在紧急情况下阻止高速旋转的螺旋桨对人身、财物的伤害。
2023-08-21 -
一种植保无人机用便携式折叠喷洒装置
本发明一种植保无人机用便携式折叠喷洒装置公开了一种能够在扩展喷洒面积的同时方便进行折叠收纳,不会干涉无人机的正常飞行和降落,且能够避免喷雾反灌到机体上,保证喷雾喷洒朝向的喷洒装置了,其特征在于转动套置于转动连接座的底部,转动电机置于转动连接座上,所述转动电机的电机轴和转动套相连接,连接器置于转动套上,进液管置于连接器上,且和连接器的内部相连通,固定端套置于连接器的底部,多个伞骨杆等角度的置于固定端套上,多个所述伞骨杆通过伞膜相连接,所述固定端套内置有连接管,所述连接管的一端和连接器的内部相连通,连接杆的一端垂直置于固定端套的底部。
2023-08-21 -
一种用于油电混合无人机脚架的自动伸缩装置及方法
本发明公开了一种用于油电混合无人机脚架的自动伸缩装置及方法,包括脚架固定座、一级脚架碳管、二级脚架碳管、伸缩电机、脚架三通、脚架横梁碳管、激光雷达传感器以及感应控制电路板;其中,一级脚架碳管与二级脚架碳管通过伸缩电机连接固定且二级脚架碳管外径小于一级脚架碳管内径;二级脚架碳管使用脚架三通与脚架横梁碳管连接固定,激光雷达传感器安装于脚架横梁碳管上且要垂直于地面,感应控制电路板用于接收激光雷达传感器传回的数据并控制伸缩电机的伸缩量以调整对应脚架高度,从而使无人机机体水平距离地面处于一个合适的高度,避免无人机降落时因地面凹凸不平导致倾翻或机身磕碰到地面,减少经济损失。
2023-08-21 -
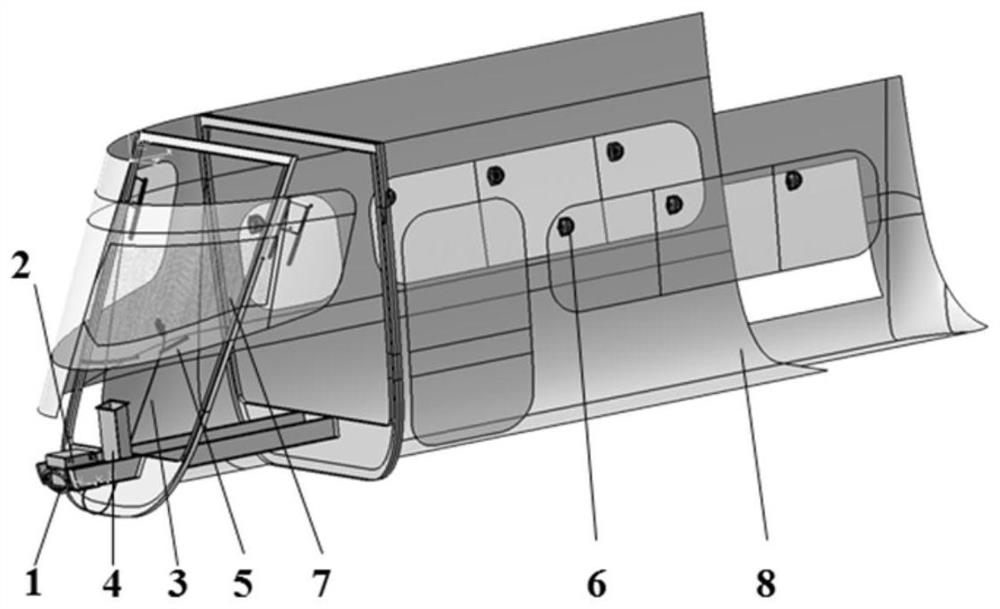
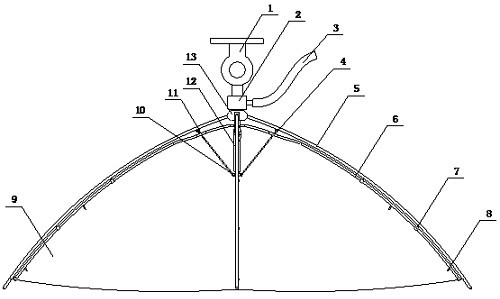
一种含有保压装置的平流层飞艇
本发明公开了一种含有保压装置的平流层飞艇,主要包括飞艇主囊体,吊舱、调压气囊与保压模块。采用调压气囊的结构,通过控制系统控制保压模块调节平流层飞艇囊体内压力。飞艇主囊体后部安装推进装置提供动力;由太阳能电池阵结合储能系统供电。同时飞艇头部安装变距螺旋桨,实现飞艇偏航及俯仰姿态的同时控制,与推进装置共同形成飞艇偏航和俯仰的双裕度控制。本发明有效解决了平流层飞艇因昼夜温差与气体泄露而无法维持良好外形,保持恒定压力的问题。本发明可根据驻空时间,飞艇载重等多种因素选取调压气囊个数、位置,具有一定的灵活性。
2023-08-21 -
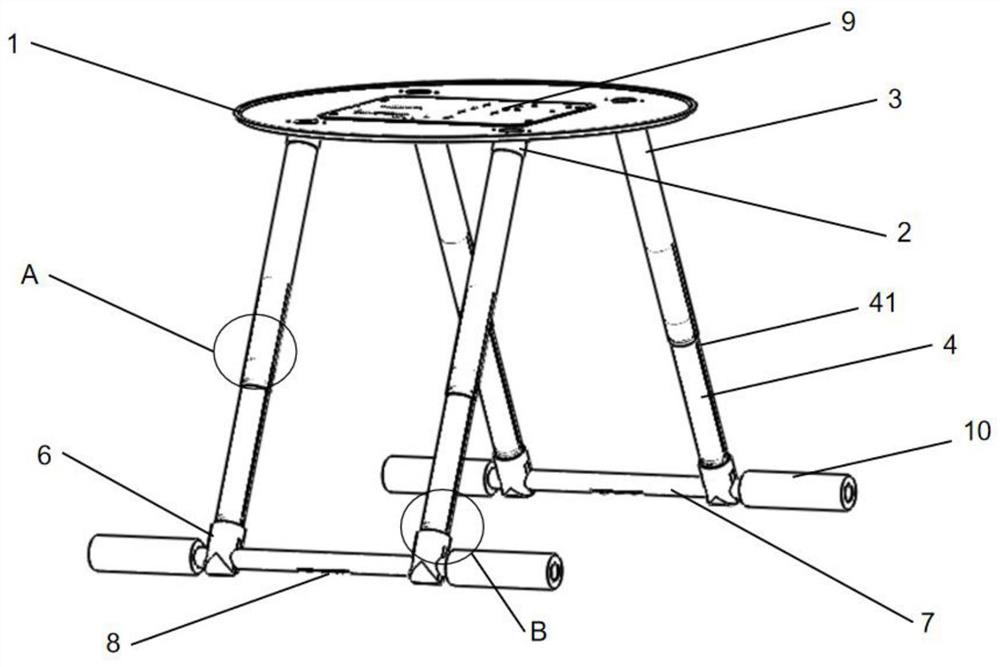
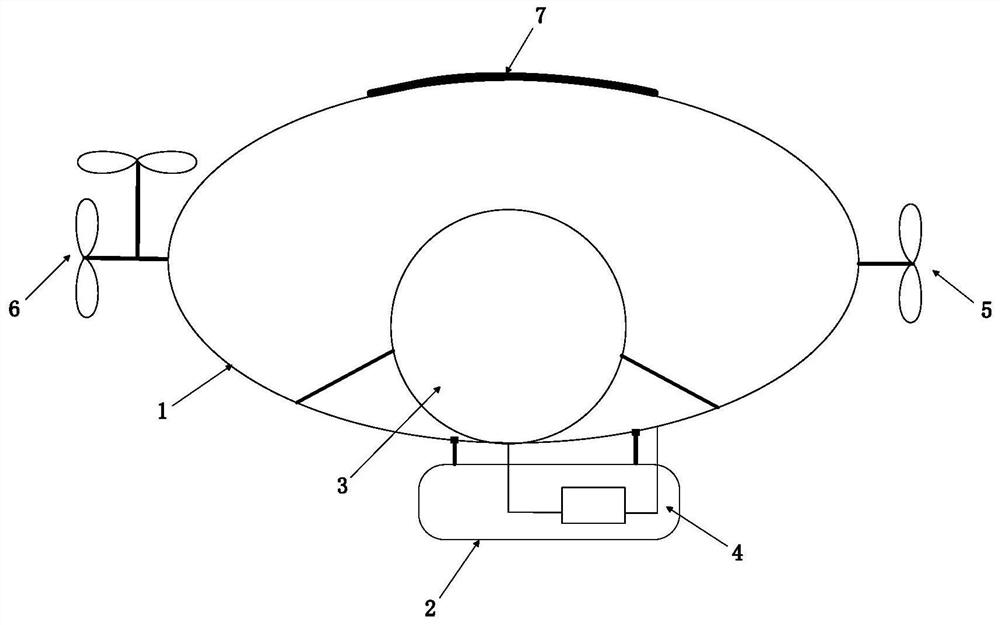
一种浮空气球高度调节装置及浮空气球系统
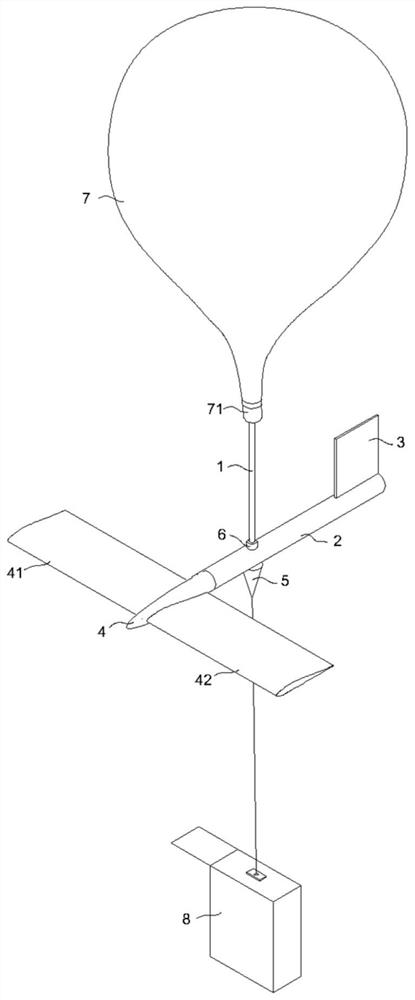
本发明公开了浮空气球高度调节装置,包括机体,通过一连接杆与浮空气球连接;机翼部,与所述机体活动连接,且可绕水平方向上的轴线旋转或锁定;控制部,设于所述机体内,用于根据浮空气球的高度位置信息控制所述机翼部旋转或锁定;所述机翼部包括至少一组对称设置的机翼,所述机翼具有第一表面和第二表面,所述第一表面和第二表面的表面形状不同。本发明还公开了一种浮空气球系统,所述浮空气球系统包括浮空气球和上述的浮空气球高度调节装置,所述浮空气球高度调节装置通过连接杆与所述浮空气球的球柄连接。本发明可对浮空气球的高度进行向上及向下两个方向调节。
2023-08-21 -
一种具有边缘计算能力的增稳云台、无人机及目标识别方法
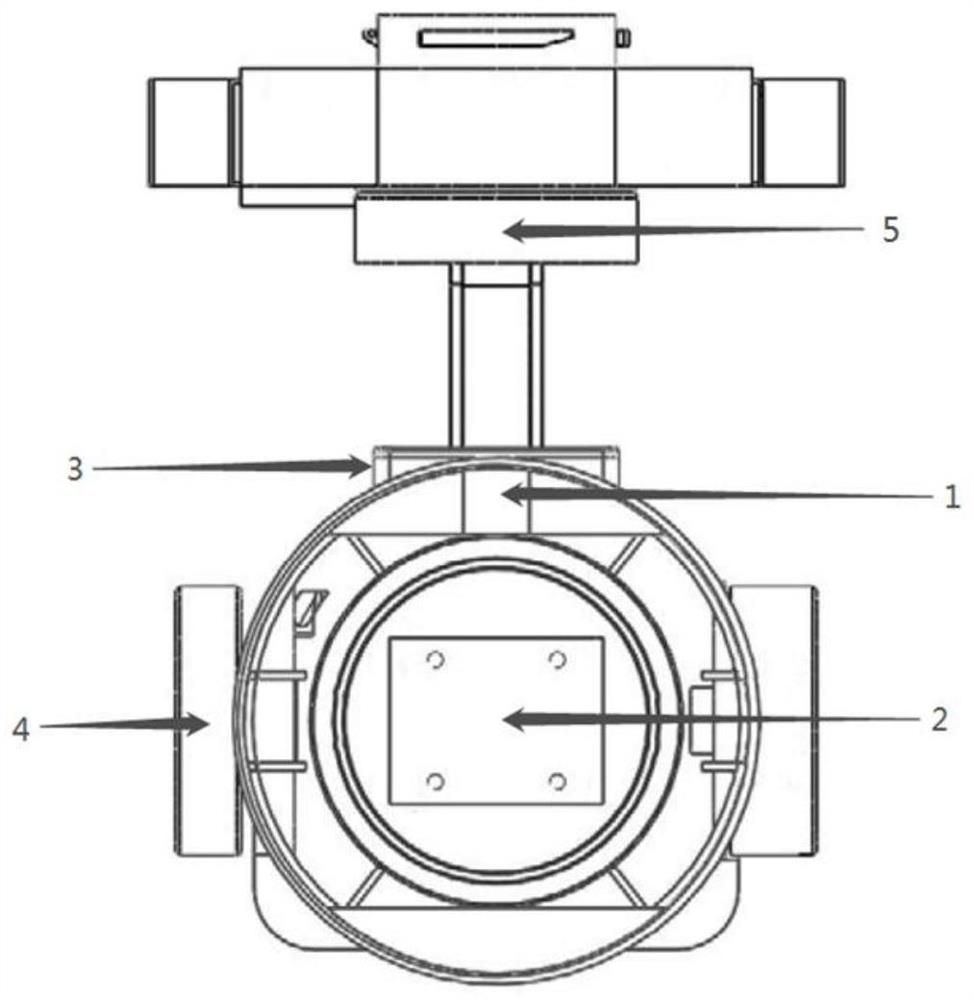
本发明公开了一种具有边缘计算能力的增稳云台、无人机及目标识别方法,其包括:第一成像设备,其用于在第一视场下获取目标图像;边缘计算模块,其用于接收第一成像设备获取的目标图像,并从中识别出目标;云台俯仰轴、云台方位轴以及第二成像设备,且所述云台俯仰轴和/或云台方位轴根据所述边缘计算模块的目标识别结果带动所述第二成像设备运动;且所述第二成像设备获取的目标图像发送至所述边缘计算模块,以供边缘计算模块从中进行目标识别。本发明可以对同一航点的多个目标分别进行快速识别和自动对准拍摄,且自动完成对拍摄目标的故障缺陷分析,由此提高电力巡检等作业的可靠性及作业效率。
2023-08-21 -
一种无人机3D增材基体复材蒙皮制造工艺
一种无人机3D增材基体复材蒙皮制造工艺,包括以下步骤;步骤一;搭建机体型架;包括设置型架基座,型架基座平整的在地面设置,所述型架基座上表面设置有型架卡槽,型架卡槽上设置有机身结构,型架卡槽和机身结构相切,所述型架卡槽通过设置在型架基座上表面的底座支撑体进行控制水平方向的精度;步骤二;机体型架组装和固定;将无人机身机身隔框按照对应的顺序安防到无人机机体型架上,并将机身主梁安放到无人机身机身隔框部件,通过焊接、铆接、打胶等手段使得无人机身机身隔框部件与机身主梁结合为一个整体;步骤三;在步骤二得到的整体外侧铺设3D增材蒙皮的基体,在基体上铺设复合材料。本发明实现大曲率结构件的快速设计和快速制造。
2023-08-21 -
一种无人机生产用零件组装设备及其使用方法
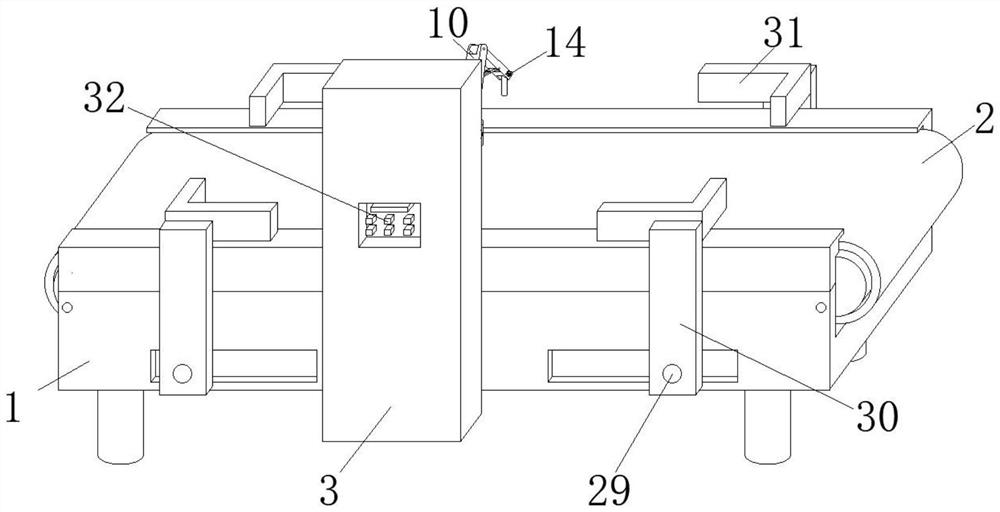
本发明公开一种无人机生产用零件组装设备及其使用方法,包括工作台,所述工作台的顶面安装有传动带,且工作台的侧壁上固接有竖板,所述竖板的侧壁上开设有凹槽一,所述凹槽一的底面安装有电动机,所述电动机的输出端上固接有传动轴一,所述传动轴一的另一端固定套接有主动齿轮,所述主动齿轮的侧壁上啮合连接有从动齿轮,所述从动齿轮内固定套接有转轴,所述转轴的两端分别与凹槽一的顶面和底面转动连接,且转轴上固定套接有臂杆一,所述臂杆一的另一端铰接有臂杆二;本发明能够固定零件,使得零件组装时不易偏移,提高了无人机组装的精确性,且无需人工手动操作,使得生产效率提高,降低了人工成本,确保了产品质量,从而可实现规模化组装。
2023-08-21 -
一种道路交通巡检无人机
本发明提供一种道路交通巡检无人机,包括主壳体,所述主壳体内设置有航电系统,所述主壳体的四角固定连接有旋臂,所述旋臂的端部固定连接有电机,所述电机的输出端固定连接有旋翼,所述主壳体的底部固定连接有定位杆,所述定位杆上安装有安装架。本发明通过安装架、第一电机、连接架和第二电机,能够及时的调节摄像机的拍摄区域,能够便于使用者快速观察到想要看到的区域,识别分析道路情况,提高了使用者的工作效率,通过激光照射机构的设置,能够对道路上欲违法的人造成威慑,起到遏制道路危险情况的发生,进一步提高了的道路的安全性,本发明结构设计简单合理,使用方便快捷,具有很强的实用性。
2023-08-21 -
一种多功能巡检无人机
本发明提供一种多功能巡检无人机,包括主体,所述主体上设置有巡检摄像机构,所述主体的四角均固定连接有旋臂,所述旋臂上固定连接有三个电机,三个所述电机在旋臂上一字排开,所述电机的输出轴固定连接有旋翼,所述旋翼的底部固定连接有固定架,所述固定架上固定连接有固定滑杆。本发明通过电机、旋转齿轮、第一齿板和第二齿板的配合使用,能够调节放置杆的间距,进而能够调节放置空间,可以放置不同大小物品,通过巡检摄像机构的设置能够及时达到巡检的目的,通过十二个电机和旋翼的设置,能够增加了无人机的载荷能力,提高无人机的运输效率,本发明结构设计简单合理,使用方便快捷,具有很强的实用性。
2023-08-21 -
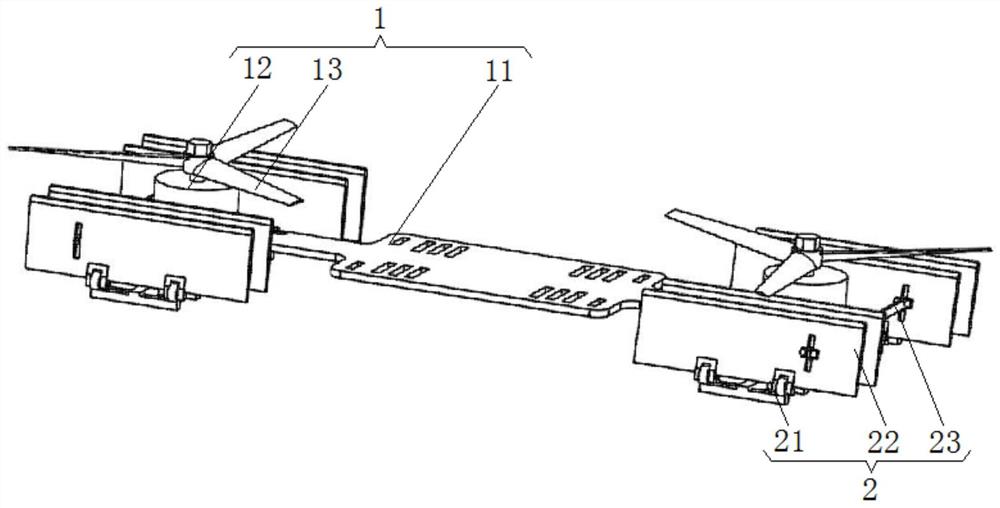
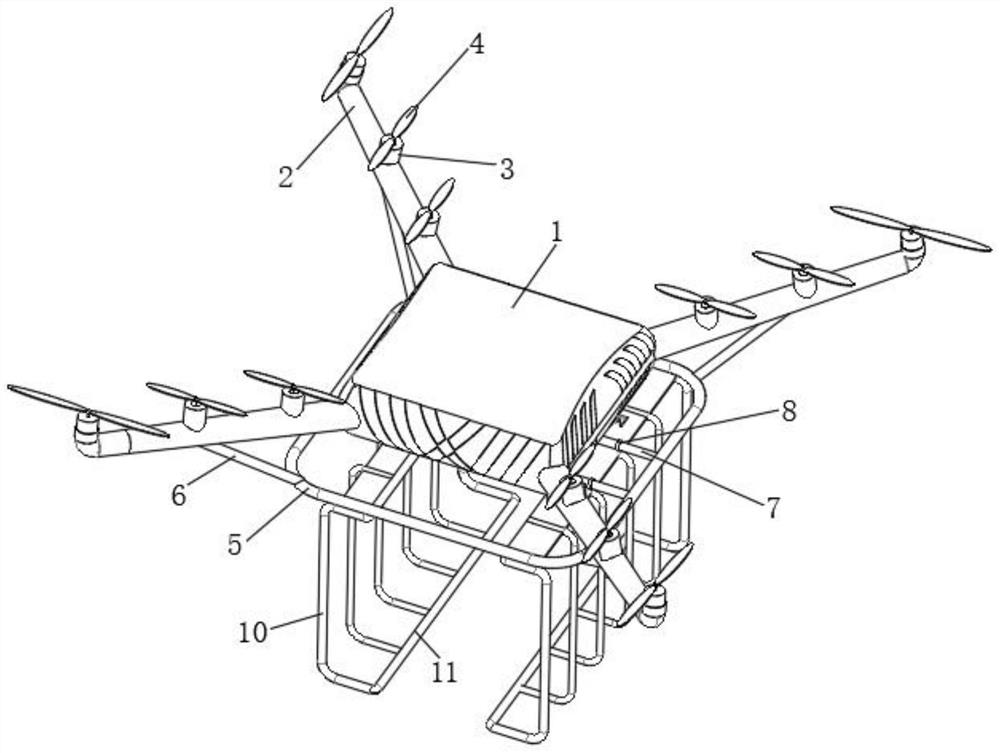
一种可组合式多功能喷杆结构
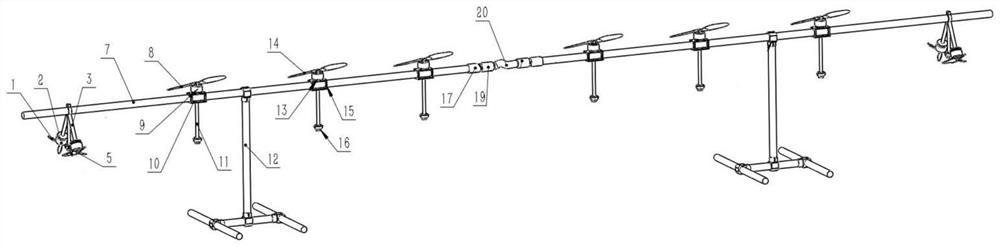
本发明公开了一种可组合式多功能喷杆结构;包括两个对称设置的基本单元及其中间的柔性连接部件;所述基本单元包括支撑杆(7),及其支撑杆(7)上依次设置的辅助旋翼组件、调整旋翼组件、脚架(12)和主升旋翼组件;所述辅助旋翼组件设置在喷杆结构两端,主升旋翼组件设置在中间的柔性连接部件的两侧,调整旋翼组件设置在辅助旋翼组件和脚架(12)之间;本发明通过控制多对旋翼其处于不同的姿态,当它在农田边角区域工作时,可以控制旋翼使其偏航运动,同时根据作物稠密程度控制其多个喷头,实现精准变量喷雾。
2023-08-21 -
无人机的刹车控制系统
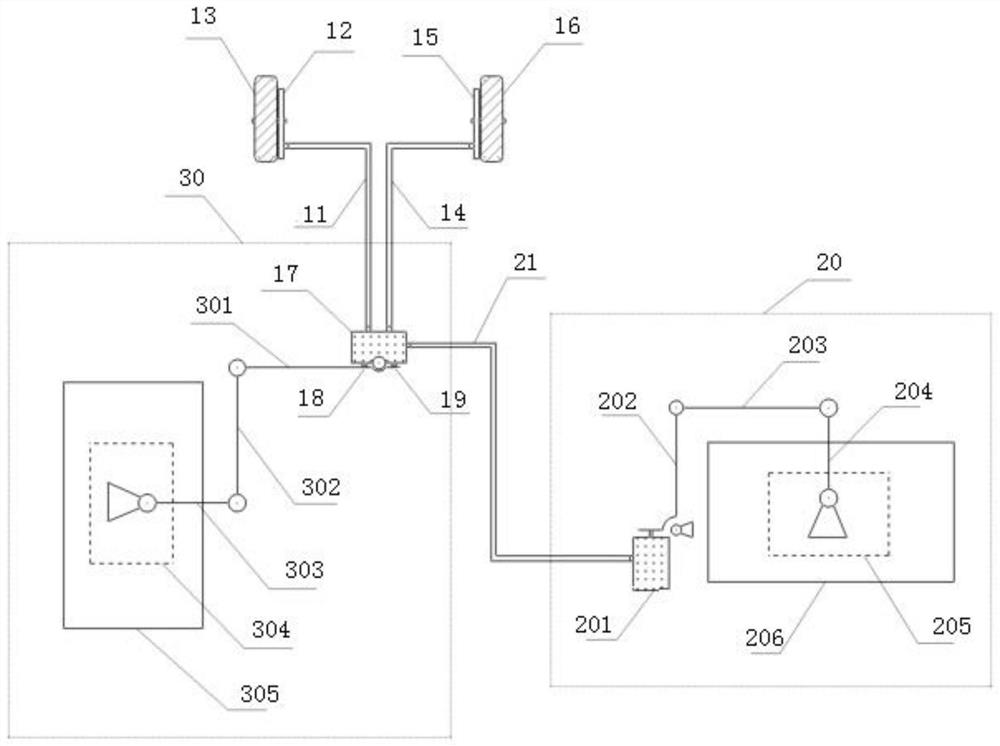
本发明涉及无人机领域,具体是无人机的刹车控制系统,包括刹车分配器、第一刹车机构和第二刹车机构,所述第一刹车机构与第二刹车机构分别与刹车分配器连接,还包括刹车管路、刹车调压控制系统和刹车分配器控制系统,所述刹车分配器上设置有第一调节活门和第二调节活门,所述第一刹车机构与第一调节活门连接,所述第二刹车机构与第二调节活门连接,所述刹车调压控制系统通过刹车管道与刹车分配器连接,所述刹车分配器控制系统与刹车分配器连接,解决了运五飞机改无人机系统过程中,刹车系统无人化控制的问题。
2023-08-21 -
一种登机自动扶梯
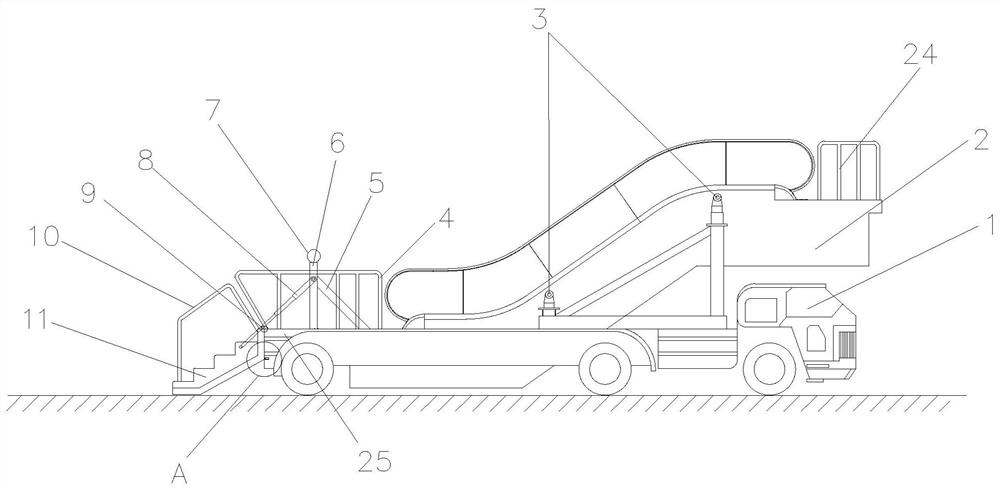
本发明涉及自动扶梯领域,尤其是涉及一种登机自动扶梯。一种登机自动扶梯,包括汽车,所述的汽车上通过液压支撑座设置有扶梯主体,所述的扶梯主体的底部设置有桁架框体,所述的桁架框体上转动连接有翻转楼梯,所述的桁架框体上通过支座转动连接有伸缩装置,所述的伸缩装置的伸缩杆转动连接在翻转楼梯上。本发明稳定性好,使用方便,乘客在使用时的安全风险较低,能够满足市场需求。
2023-08-21 -
一种风动无人机喷洒系统
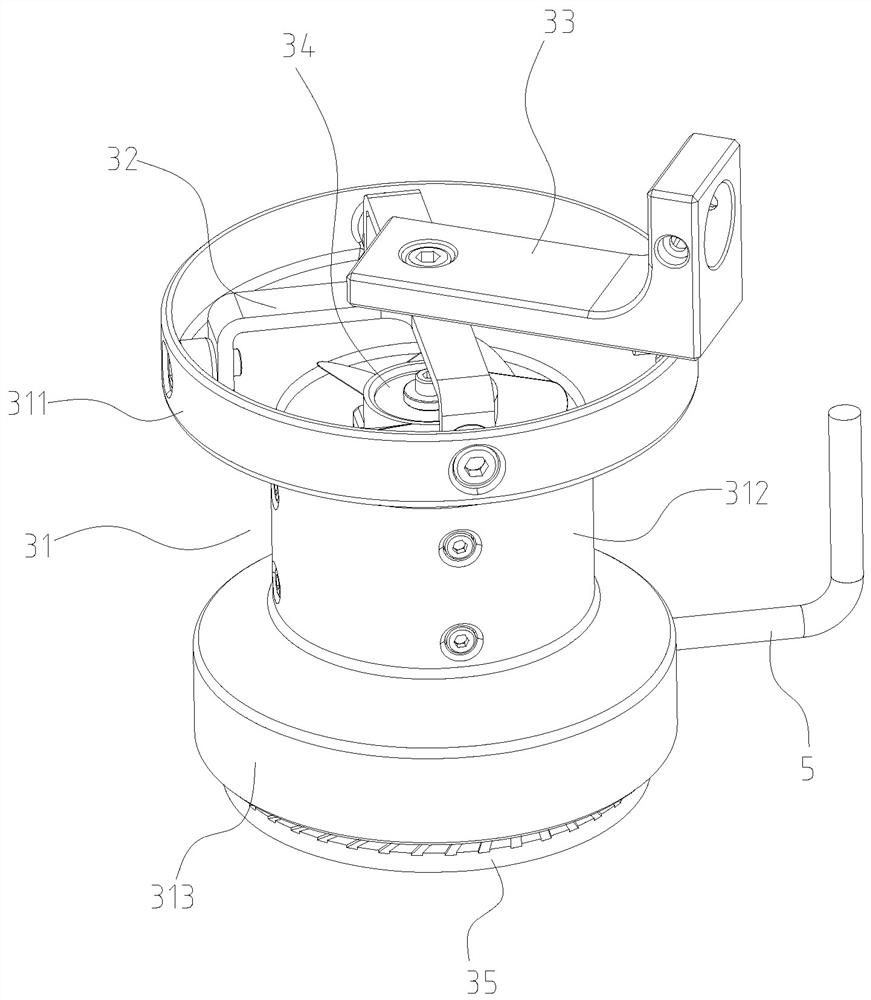
一种风动无人机喷洒系统,包括无人机和集成在无人机上的喷洒装置,无人机包括机身、与机身连接的机臂、设在机臂外端的无刷电机和与无刷电机配合的螺旋桨;所述喷洒装置包括设在机身上的储药箱和设在机臂外端且于螺旋桨下方的旋转喷洒机构,旋转喷洒机构与无刷电机一一对应,储药箱通过导液管与旋转喷洒机构连接;所述旋转喷洒机构包括筒体、设在筒体下方的雾化盘、与雾化盘连接的齿轮加速组件和设在筒体内上部的风叶,螺旋桨旋转在下方形成的风场驱动风叶,风叶通过齿轮加速组件带动雾化盘,导液管的输出端对应雾化盘。充分利用无人机飞行时产生的风场,能够把风场利用起来作为喷洒装置的动力,喷洒装置本身无需额外动力也达到农药喷洒的效果。
2023-08-21 -
一种采用新型材料的残骸回收装置
本发明涉及新材料相关领域,尤其是一种采用新型材料的残骸回收装置,包括机体,所述机体下侧端壁内开口向下的设有左右两个对称的第一传动腔,所述第一传动腔内设有用于回收残骸的回收装置,所述回收装置包括左右两个所述第一传动腔内传动连接设有履带,可以在残骸的落区内移动,避免设备因残骸的落点的计算偏差而无法准确接收到残骸;采用了压电材料和磁流变液,可以使残骸落入机体的一瞬间将磁流变液转变为高粘度状态,从而缓冲掉接大部分的动能;可以在残骸稳定在机体内之后对残骸进行降温,方便后续工人将残骸从机体内取出。
2023-08-21