一种实现全方位包覆法采摘的气动软体机器人系统及方法
文献发布时间:2023-06-19 09:43:16
技术领域
本发明涉及机器人技术领域,尤其涉及一种实现全方位包覆法采摘的气动软体机器人系统及方法。
背景技术
农业作为国家的第一产业,在国民经济发展中具有重要地位。近年来,我国农业人工成本显著并增加远超发达国家,因此如何自动化的进行农业生产成为迫在眉睫的问题。但由于农产品,尤其是水果、蔬菜的外皮柔韧易破,且不同种类的农产品形状各异,因此在采摘过程中极易受到损伤造成浪费,导致现阶段农产品采摘不得不依赖于人工完成。
随着科技的发展和工业4.0概念的提出,机器人技术逐渐走进我们的生活并得到广泛应用。传统的刚性机器人由于灵活性欠缺、环境适应性差,在某些特殊用途方面,具有很大局限性。相较于传统的刚性机器人,软体机器人是与目标对象交互的新型执行部件,具有柔软、自由度大、易变形等优点,使其得以适应不同形状的对象,且不会损伤柔软易碎的物体。在食品生产、农业采摘、医疗服务等领域有着广阔的应用前景。
然而目前气动软体机器人在果蔬采摘时,并未很好地发挥出其软体的特性,极大制约了采摘的效果和效率。经文献检索发现,申请号为201810371643.5的中国发明专利申请公开了一种气动果蔬采摘软体手,该装置包括一个连接底座和多根气动软体手指。但是上述装置存在一些不足。
1、上述装置核心部件是3根气动软体手指,但软体手指夹持果蔬时只是点接触、线接触,并不是一整个面的接触;其缺点有:①无法形成全方位的包裹保护,存在夹持不牢固的可能性。②果蔬受力点只是三根手指的接触点,造成受力不均,若想夹持住果蔬,需要给予较大的接触力,例如在夹取草莓、猕猴桃时就会造成果蔬局部凹陷,损坏果蔬。
2、进行果蔬采摘时应是全方位、任意角度的,而上述装置转动部分由刚性部件控制,但刚性部件的自由度约束,无法做到360°任意抓取。
3、上述装置的刚性部件在果蔬密集处可能会碰坏其余果蔬,无法在采摘时保证其他果蔬的质量。
发明内容
有鉴于此,本发明目的是提供一种实现全方位包覆法采摘的气动软体机器人系统及方法。
一种实现全方位包覆法采摘的气动软体机器人系统,包括腕部与采摘部,所述腕部包括软体手指结构以及三棱柱结构,所述软体手指包括腔体层和应变限制层,所述采摘部是一个环形套结构,包括外壁、内壁、隔板、圆环形的应变限制环、充气孔、隔板以及通气孔;
所述采摘部的环形套结构通过硅橡胶粘在腕部结构的上表面,且环形套结构的底部中心位置的充气孔与腕部结构的三棱柱中间位置的充气孔对接到一起,形成最终完整的实现全方位包覆式采摘的软体机器人系统。
进一步地,所述腔体层由多个排布均匀的气腔组成,每个气腔的排列方向与应变限制层成垂直角度,且气腔内部依靠一个气道相互连通,所述腔体层的截面结构是半圆形。
进一步地,所述软体手指结构有三个,每根所述软体手指包含一个充气孔,软体手指充气量不同,其弯曲程度也会不同,根据三根软体手指的不同弯曲程度实现气动软体机器人全方位的运动;每根所述软体手指之间成120°夹角分布在所述三棱柱结构的外表面,所述三棱柱底面是等边三角形。
进一步地,所述环形套结构的底部中心位置设置一个充气孔,所述隔板有多个,且均匀垂直设置在内壁和外壁之间,每个隔板的中央都设置有通气孔,所述圆环形的应变限制环设置于外壁外表面。
进一步地,所述腕部和采摘部的材料均是硅橡胶材料。
进一步地,所述采摘部和腕部均是采用3D打印技术制作。
进一步地,包括实现全方位包覆法采摘的气动软体机器人系统的控制电路,该控制电路包括24V电源、220V电源、气泵、电磁比例调压阀、MOS驱动电路、单片机、5V电源以及气动软体机器人;所述24V电源电性连接电磁比例调压阀,220V电源电性连接气泵,气泵电性连接电磁比例调压阀,5V电源电性连接单片机,单片机电性连接MOS驱动电路,MOS驱动电路电性连接电磁比例调压阀,电磁比例调压阀电性连接气动软体机器人。
一种全方位、包覆法采摘的气动软体机器人方法,用于任一项所述的一种实现全方位包覆法采摘的气动软体机器人系统中,包括:电磁比例调压阀将电信号转换为气压输出,控制气压输出的大小,将输出的气压输给软体机器人,驱动软体机器人运动。
进一步地,当向所述环形套结构充气时,内壁发生膨胀,产生向内挤压的力,实现夹持物体。
本发明提供的技术方案带来的有益效果是:(1)本发明的腕部结构由三根新颖的多腔体型软体机器人和三棱柱结构组成,其曲率均匀变化、应力集中减弱,可以实现空间中360°全方位运动,充分发挥了软体机器人无限自由度的潜能;采摘部创新性的采用环形套组成,通过设计合理的结构,抑制了轴向膨胀和外壁膨胀,最终达到采摘过程中完整包覆、保护果蔬的效果;(2)本系统制作过程采用先进的3D打印Polyjet技术,与传统开模、注塑方法相比,通过该技术打印可以控制软体机器人的材料刚度,可靠性高,一体成型,便于重复制备。
附图说明
图1是本发明一种实现全方位包覆法采摘的气动软体机器人系统的结构图;
图2是本发明一种实现全方位包覆法采摘的气动软体机器人系统的腕部结构图;
图3是本发明一种实现全方位包覆法采摘的气动软体机器人系统的单根软体手指结构图;
图4是本发明一种实现全方位包覆法采摘的气动软体机器人系统的腕部弯曲示意图;
图5是本发明一种实现全方位包覆法采摘的气动软体机器人系统的采摘部仰视图;
图6是本发明一种实现全方位包覆法采摘的气动软体机器人系统的采摘部剖面图;
图7是本发明一种实现全方位包覆法采摘的气动软体机器人系统的圆环形的应变限制环;
图8是本发明一种实现全方位包覆法采摘的气动软体机器人系统及方法的控制电路图;
图9是本发明一种实现全方位包覆法采摘的气动软体机器人系统的弯曲示意图。
具体实施方式
为使本发明的目的、技术方案和优点更加清楚,下面将结合附图对本发明实施方式作进一步地描述。
请参考图1,本发明提供了一种全方位包覆法采摘的气动软体机器人系统,应用于果蔬采摘,包括腕部与采摘部;请参考图2,所述腕部包括软体手指结构以及三棱柱结构,所述软体手指包括腔体层和应变限制层;请参考图3,所述腔体层由多个排布均匀的气腔组成,每个气腔的排列方向与应变限制层成垂直角度,且气腔内部依靠一个气道相互连通,所述腔体层的截面结构是半圆形。
所述软体手指结构有三个,每根所述软体手指包含一个充气孔;每根所述软体手指之间成120°夹角分布在所述三棱柱结构的外表面,所述三棱柱底面是等边三角形。腕部结构是可以360°任意方向弯曲的,如图2所示,软体手指A、软体手指B以及软体手指C的充气程度不同,腕部的弯曲情况也会不同,如果软体手指A充气,软体手指B充气,软体手指C充少量气,腕部会向软体手指C的一侧弯曲,所以根据三根手指充气量的不同,气动软体机器人可以实现全空间360度弯曲,图4是腕部的弯曲示意图。
参考图5和图6,所述采摘部是一个环形套结构,包括外壁D、内壁E、圆环形的应变限制环、充气孔G、隔板F以及通气孔J;所述环形套结构的底部中心位置设置一个充气孔G,所述隔板F有多个,且均匀垂直设置在内壁E和外壁D之间,每个隔板F的中央都设置有通气孔J,环形套整体由硅橡胶材料制作。当向环形套充气时,内壁E发生膨胀,产生向内挤压的力,可以夹持住物体。
当充气时,内壁E和外壁D都会发生膨胀,但是本发明只需要内壁E发生膨胀产生向内挤压的力,不需要外壁D发生膨胀,因为两侧都发生膨胀会影响充气效率甚至损坏环形套。所以在外壁D的外表面,加上一个圆环形的应变限制环,如图7所示,应变限制环是由硬度比环形套的硬度要大的硅橡胶构成,以便起到束缚膨胀的作用,这样外壁D就不会发生膨胀。内壁E和外壁D除了会发生向内和向外的膨胀,还有可能发生上下方向的膨胀即轴向膨胀,因此本发明加上了隔板F,以起到牵制作用,抑制轴向膨胀,同时在每个隔板的中央都设置有通气孔J,以便于通气。
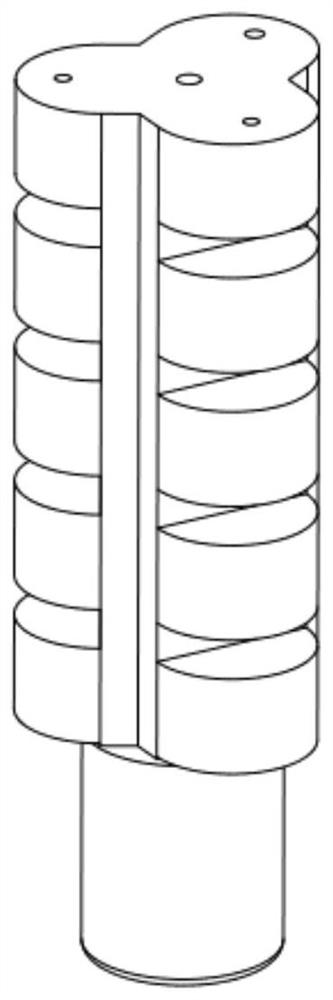
请参考图9,所述采摘部的环形套结构通过硅橡胶粘在腕部结构的上表面,且环形套结构的底部中心位置的充气孔与腕部结构的三棱柱中间位置的充气孔对接到一起,形成最终完整的实现全方位包覆式采摘的软体机器人系统。
所述采摘部和腕部均是采用3D打印技术制作的,使用Stratasys公司的Polyjet技术,此技术的打印机可调节硅橡胶材料与硬质材料的比例,以产生邵氏刚度选择范围为30A-95A之间的硅橡胶材料。与传统开模和注塑方法制作的软体机器人相比,通过该技术打印可以控制软体机器人的材料刚度,可靠性高,一体成型,便于重复制备。由于腕部结构和环套部结构的内部是中空结构的,所以打印完毕后要从中空结构中移除支撑材料,采用Stratasys公司推荐的化学浸渍法,即:将3D打印部件浸泡在2%氢氧化钠和1%偏硅酸钠的溶液中并搅拌,在此过程后,采用高压水去除残余的支撑材料。
所述全方位包覆法采摘的气动软体机器人系统包括实现气动软体机器人系统的控制电路,请参考图8,该控制电路包括24V电源、220V电源、气泵、电磁比例调压阀、MOS驱动电路、单片机、5V电源以及气动软体机器人;所述24V电源电性连接电磁比例调压阀,220V电源电性连接气泵,气泵电性连接电磁比例调压阀,5V电源电性连接单片机,单片机电性连接MOS驱动电路,MOS驱动电路电性连接电磁比例调压阀,电磁比例调压阀电性连接气动软体机器人。
一种全方位包覆法采摘的气动软体机器人方法,用于任一项所述的一种实现全方位包覆法采摘的气动软体机器人系统中,包括:电磁比例调压阀将电信号转换为气压输出,控制气压输出的大小,将输出的气压输给软体机器人,驱动软体机器人运动。
以单根软体手指为例,所述空气通过充气孔充入所述气动软体机器人系统之后,气体进入到软体手指结构的腔体层;每相邻两个气腔之间间隔一定距离,当气体进入气腔之后,气腔体积逐渐增大,相邻两个气腔由于体积增大相互挤压,由于应变限制层的硅胶材料比腔体层更硬一点,所以其弹性形变要小很多,限制整个软体手指轴向变形,从而整个软体手指向应变限制层一侧弯曲运动;
电磁比例调压阀将电信号转换为气压输出,控制气压输出的大小,将输出的气压输给软体机器人,驱动软体机器人运动,所述电磁比例调压阀的输出量由单片机控制,单片机引脚电流小,无法直接驱动电磁比例调压阀,因此加上了一个MOS驱动放大电路,增大电流。
对所公开的实施例的上述说明,使本领域专业技术人员能够实现或使用本发明。对这些实施例的多种修改对本领域的专业技术人员来说将是显而易见的,本发明中所定义的一般原理可以在不脱离本发明的精神或范围的情况下,在其它实施例中实现。因此,本发明将不会被限制于本文所示的这些实施例,而是要符合与本发明所公开的原理和新颖特点相一致的最宽的范围。
- 一种实现全方位包覆法采摘的气动软体机器人系统及方法
- 一种实现全方位包覆法采摘的气动软体机器人系统