一种路侧信息感知设备
文献发布时间:2023-06-19 10:41:48
技术领域
本发明实施例涉及道路安全领域,尤其涉及一种路侧信息感知设备。
背景技术
随着社会的不断进步,汽车数量在不断的增加,尤其是私家车的普及,使得路况信息正变得越复杂,这也对路侧信息的感知提出了更高要求。
路侧感知是对整个路面的交通参与者交通行为的感知,通常是通过雷达系统和视觉系统来获取路侧信息,但视觉系统受自然环境(例如,雨水、雾霾和黑夜)影响较大,且视距范围较小;而雷达视觉系统的测量精度较低,存在雷达波反射误判的情况,因此,需要将雷达系统和视觉系统获取的信息进行信息融合,然而将雷达系统与视觉系统安装于路侧时,受到安装环境的影响,雷达系统与视觉系统之间的参数标定(例如,相对距离和相对倾斜角度)极为复杂,且难以保证时间戳上的同步性。
发明内容
本发明实施例提供了一种路侧信息感知设备,包括:控制模块、雷达探测模块、摄像组件和壳体;所述控制模块、所述雷达探测模块和所述摄像组件均位于所述壳体内部;
所述控制模块分别连接所述雷达探测模块和所述摄像组件,用于控制所述雷达探测模块和所述摄像组件的运行;
所述雷达探测模块,用于获取交通参与者的方位信息;其中,所述方位信息包括位置信息、速度信息和/或角度信息;
所述摄像组件,用于获取道路交通图像。
所述路侧信息感知设备还包括:多媒体串行链路和控制器局域网络模块;
所述摄像组件,通过所述多媒体串行链路与路侧边缘计算设备通信,以将获取到的所述道路交通图像,发送给所述路侧边缘计算设备;
所述雷达探测模块,通过所述控制器局域网络模块与所述路侧边缘计算设备通信,以将获取到的所述交通参与者的方位信息,发送给所述路侧边缘计算设备;
其中,所述路侧边缘计算设备,用于将所述道路交通图像和所述交通参与者的方位信息,进行信息融合。
所述路侧信息感知设备还包括:内置全球定位系统模块、内置角度测量模块和/或内置电子罗盘;
所述内置全球定位系统模块,连接所述控制模块,用于获取经纬度信息,并通过所述控制模块,将所述经纬度信息发送给路侧边缘计算设备;
所述内置角度测量模块,连接所述控制模块,用于获取倾斜角度信息,并通过所述控制模块,将所述倾斜角度信息发送给所述路侧边缘计算设备;其中,所述内置角度测量模块包括内置加速度传感器和/或姿态传感器;
所述内置电子罗盘,连接所述控制模块,用于获取方向角信息,并通过所述控制模块,将所述方向角信息发送给所述路侧边缘计算设备。
所述路侧信息感知设备还包括:无线上网模块;所述无线上网模块,连接所述控制模块,用于获取调试信息,并将所述调试信息传输给所述控制模块。
所述路侧信息感知设备还包括:电源管理模块;
所述电源管理模块,连接所述控制模块和供电电源,用于将所述供电电源转换为工作电源。
所述摄像组件包括第一摄像头和第二摄像头,所述第一摄像头的像素值大于所述第二摄像头,所述第二摄像头与交换机连接;
所述第二摄像头,还用于将获取到的道路交通图像传输给后台服务器,以通过后台服务器,进行道路交通图像展示。
所述路侧信息感知设备还包括:水平标尺和倾角标尺,所述水平标尺和所述倾角标尺均位于所述壳体外部;
所述水平标尺,用于提供安装时的水平参照物;
所述倾角标志,用于提供安装时的倾角参照物。
所述路侧信息感知设备还包括:至少一个安装凹槽,所述至少一个安装凹槽位于所述壳体的上端面,用于提供外接标定设备的安装接口;所述外接标定设备包括外接全球定位系统模块、外接姿态角传感器和/或外接电子罗盘。
所述路侧信息感知设备,还包括:显示屏幕,所述显示屏幕位于所述壳体的上端面,用于显示所述内置全球定位系统模块的经纬度信息、所述内置角度测量模块的倾斜角度信息和/或所述内置电子罗盘的方向角信息。
所述路侧信息感知设备还包括:散热片;所述散热片,位于所述壳体的开孔处,用于降低所述路侧信息感知设备的内部温度。
本发明实施例中的路侧信息感知设备,将雷达探测模块和摄像组件集成在一个壳体内部,且位于邻近的固定位置,避免了对雷达探测模块和摄像组件之间相对位置、相对角度和相对方向角的标定,针对相同的交通区域,提供了丰富的道路感知信息,同时,通过控制模块的运行控制,保证了雷达探测模块获取的交通参与者的方位信息,与摄像组件获取的道路交通图像在时间戳上的同步性。
附图说明
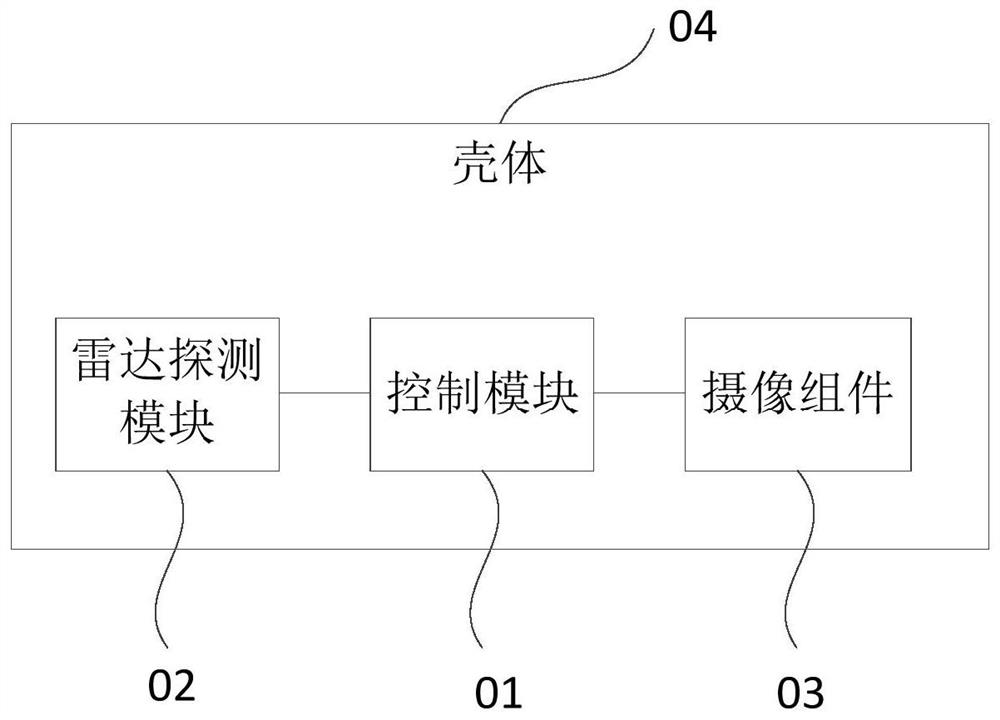
图1是本发明提供的一种路侧信息感知设备的结构图;
图2是本发明提供的一种路侧信息感知设备的结构图;
图3是本发明提供的一种路侧信息感知设备的结构图;
图4是本发明提供的一种路侧信息感知设备的结构图。
具体实施方式
下面结合附图和实施例对本发明作进一步的详细说明。可以理解的是,此处所描述的具体实施例仅仅用于解释本发明,而非对本发明的限定。另外还需要说明的是,为了便于描述,附图中仅示出了与本发明相关的部分而非全部结构。
实施例一
图1为本发明提供的一种路侧信息感知设备的结构框图,包括:控制模块01、雷达探测模块02、摄像组件03和壳体04;所述控制模块01、所述雷达探测模块02和所述摄像组件03均位于所述壳体04内部;
所述控制模块01分别连接所述雷达探测模块02和所述摄像组件03,用于控制所述雷达探测模块02和所述摄像组件03的运行;控制模块01,作为路侧信息感知设备的控制中枢,用于控制路侧信息感知设备内部各功能组件和功能模块的运行,控制模块01具体包括STM32微控制器;其中,STM32微控制器具有高性能、低成本和低功耗的特点,且具有极好的兼容性,可以作为多种扩展功能组件和扩展功能模块的控制机构。
所述雷达探测模块02,用于获取交通参与者的方位信息;其中,所述方位信息包括位置信息、速度信息和/或角度信息;雷达探测模块02,通过向道路中的交通参与者(例如,车辆和行人)发射探测信号,并在接收到交通参与者反射的回波信号时,通过比较回波信号与探测信号,确定各交通参与者的方向、速度和/或距离,其具有作用范围大、测距精度稳定以及受环境因素影响小等特点;具体的,雷达探测模块02可以包括激光雷达、超声波雷达、微波雷达和/或毫米波雷达;其中,激光雷达的探测信号位于红外波段和可见光波段,以激光为工作光束,具有高精度的特点;超声波雷达的探测信号在介质中的穿透性较强,尤其适合短距离内的方位测量;微波雷达使用波长较短的无线电波作为探测信号,具有较好的方向性,且探测距离较远,性能稳定;毫米波雷达,是工作在毫米波波段(Millimeter Wave)的探测雷达,波长在1毫米至10毫米之间,具有抗干扰能力强的特点。
所述摄像组件03,用于获取道路交通图像;道路交通图像以直观的方式展示了道路中的交通情况,对近距离范围内的各交通参与者具有极高的测距精度,同时,对各交通参与者的高度信息和宽度信息同样具有较高的测量精度,并且还可以获取车道线以及道路标识,丰富了道路感知信息的类型。
如图2所示,可选的,本发明实施例中,所述路侧信息感知设备还包括:多媒体串行链路05和控制器局域网络模块06;所述摄像组件03,通过所述多媒体串行链路05与路侧边缘计算设备通信,以将获取到的所述道路交通图像,发送给所述路侧边缘计算设备;所述雷达探测模块02,通过所述控制器局域网络模块06与所述路侧边缘计算设备通信,以将获取到的所述交通参与者的方位信息,发送给所述路侧边缘计算设备;其中,所述路侧边缘计算设备,用于将所述道路交通图像和所述交通参与者的方位信息,进行信息融合。具体的,路侧边缘计算设备,分别对道路交通图像和交通参与者的方位信息进行特征提取和模式识别处理,并按类别进行关联,最后利用融合算法将同一个交通参与者的所有相关信息进行整合,例如,以道路交通图像为主体信息,将交通参与者的方位信息进行图像特征转化,并融合于道路交通图像中,最终获取到的道路交通图像中,标注了各个交通参与者的方位信息,;可选的,在本发明实施例中,对路侧边缘计算设备的信息融合方式不作具体限定。
多媒体串行链路(GMSL)05可以对数字视频和音频数据进行串行转换,并通过一对双绞线实现串行传输,相比于传统的图像传输技术,具有传输速度快的特点,因此,在本发明实施例中,摄像组件03包括GMSL摄像头,即采用支持GMSL功能的摄像头代替传统的网络摄像头,通过多媒体串行链路05将道路交通图像发送给路侧边缘计算设备,以降低道路交通图像传输的延时时间。控制器局域网络(CAN)模块06是带有两路CAN控制器的16位微控制器,支持CAN2.0A和CAN2.0B协议,具有高传输速度的特点,可同时适用于高速和低速CAN总线网络,具有极好的密封性,可适用于各种恶劣环境中,可以确保交通参与者的方位信息的传输时效性。
路侧边缘计算设备,在进行信息融合时,除了需要获取摄像组件03发送的道路交通图像,以及获取雷达探测模块02发送的交通参与者的方位信息,还需要获取摄像组件03和雷达探测模块02各自的位置信息、倾斜角度信息和方向角信息,以在进行信息融合时,确保数据的准确性;而在本发明实施例中,摄像组件03和雷达探测模块02为一体式设备,均集成在壳体04内,且位于相邻位置,其位置信息、倾斜角度信息和方向角信息均相同,因此,不需要标定雷达探测模块02与摄像组件03之间的相对误差,只需要获取该一体式设备的位置信息、倾斜角度信息和方向角信息即可;具体的,可以在路侧信息感知设备安装完毕后,通过外接标定设备,检测其标定信息,即位置信息、倾斜角度信息和方向角信息,并预先记录在路侧边缘计算设备中,路侧边缘计算设备在获取到该路侧信息感知设备发送的道路交通图像和交通参与者的方位信息后,可直接根据存储的上述标定信息,进行信息融合。
可选的,在本发明实施例中,所述路侧信息感知设备还包括:内置全球定位系统模块07、内置角度测量模块08和/或内置电子罗盘09;所述内置全球定位系统模块07,连接所述控制模块01,用于获取经纬度信息,并通过所述控制模块01,将所述经纬度信息发送给路侧边缘计算设备;所述内置角度测量模块08,连接所述控制模块01,用于获取倾斜角度信息,并通过所述控制模块01,将所述倾斜角度信息发送给所述路侧边缘计算设备;其中,所述内置角度测量模块08包括内置加速度传感器和/或姿态传感器;所述内置电子罗盘09,连接所述控制模块01,用于获取方向角信息,并通过所述控制模块01,将所述方向角信息发送给所述路侧边缘计算设备。在自然环境下,路侧信息感知设备会受到外界环境干扰,容易出现震动和偏移,难以保证数据的准确性,因此可以在路侧信息感知设备内部,内置标定设备,即内置全球定位系统模块07、内置角度测量模块08和/或内置电子罗盘09,以通过控制模块01,将经纬度信息、倾斜角度信息和/或方向角信息,发送给路侧边缘计算设备;其中,方向角信息是路侧信息感知设备与正北方向的夹角。
可选的,在本发明实施例中,所述路侧信息感知设备还包括:无线上网(Wifi)模块;所述无线上网模块10,连接所述控制模块01,用于获取调试信息,并将所述调试信息传输给所述控制模块01。在对路侧信息感知设备进行调试时,调试设备通过路侧信息感知设备中的无线上网模块10,向控制模块01发送调试信息,以对路侧信息感知设备进行调试。
可选的,在本发明实施例中,所述路侧信息感知设备还包括:电源管理模块11;所述电源管理模块11,连接所述控制模块01和供电电源,是一种高频电能转换装置,用于将所述供电电源转换为工作电源。路侧信息感知设备各功能组件和功能模块所需工作电源的电压不同,因此,电源管理模块11连接供电电源(例如,220V的供电电源),并将供电电源转化为各功能组件和功能模块的工作电源,例如,控制模块01所需的工作电源为3.3V电压;如图3所似,电源管理模块11连接控制模块01和供电电源,输出1.2V工作电源、1.8V工作电源、3.3V工作电源、5V工作电源和0V工作电源(即接地);内置角度测量模块08包括六轴惯性测量单元,型号为ASM330LHH;控制模块01包括STM微控制器,控制模块01将获取到的内置角度测量模块08发送的倾斜角度信息,通过多媒体串行链路05发送给路侧边缘计算设备。
可选的,在本发明实施例中,所述路侧信息感知设备还包括:供电检测模块12;所述供电检测模块12,连接所述控制模块01和供电电源,用于向所述控制模块01提供检测电压;其中,所述检测电压用于所述控制模块01判断所述供电电源是否出现断电状况。供电检测模块12将供电电源的电压信号转换为检测电压(例如,3.3V的检测电压),并将该检测电压提供给控制模块01,当供电电源出现断电状况时,供电检测模块12无法向控制模块01提供检测电压,当供电电源未出现断电状况时,供电检测模块12会一直向控制模块01提供检测电压;特别的,当供电电源出现断电状况时,电源管理模块11不会立即处于无电状态,会进行一段时间的持续放电(通常持续2秒至5秒),可以继续维持控制模块01和壳体04内部无线通信模块的正常工作;其中,无线通信模块包括窄带物联网(Narrow Band Internet ofThings,NB-IOT)通信模块、紫蜂(ZigBee)通信模块和/或远距离无线电(Long RangeRadio,LORA)通信模块;当控制模块01无法获取到供电检测模块12发送的检测电压时,会通过无线通信模块13,向后台服务器发送断电信号,以通知工作人员供电电源出现断电情况。
可选的,在本发明实施例中,所述摄像组件03包括第一摄像头和第二摄像头,所述第一摄像头的像素值大于所述第二摄像头,所述第二摄像头与交换机连接;所述第二摄像头,还用于将获取到的道路交通图像传输给后台服务器,以通过后台服务器,进行道路交通图像展示。摄像组件03拍摄的道路交通画面除了用于路侧边缘计算设备的信息融合,还可以为后端服务器提供道路交通的监测画面,因此,在摄像组件03中设置两个像素值不同的摄像头,即第一摄像头和第二摄像头,第一摄像头的像素值大于所述第二摄像头,例如,第一摄像头为500万像素的GMSL摄像头,第二摄像头为200万像素的网络摄像头;第一摄像头和第二摄像头拍摄的道路交通画面,都可以通过多媒体串行链路05传输给路侧边缘计算设备,也可以仅将第一摄像头拍摄的道路交通画面,通过多媒体串行链路05传输给路侧边缘计算设备;而第二摄像头拍摄的道路交通画面,还可以通过交换机传输给云端的后台服务器,作为后台的监测画面,由于第二摄像头的像素值较低,在进行云端传输时,占用的带宽资源较少,可以确保后台获取的监测画面的时效性,同时,第一摄像头具备较高的像素值,可以确保本地的路侧边缘计算设备获取到较为清晰的道路交通画面。
可选的,在本发明实施例中,所述路侧信息感知设备还包括:水平标尺和倾角标尺,所述水平标尺和所述倾角标尺均位于所述壳体04外部;所述水平标尺,用于提供安装时的水平参照物;所述倾角标志,用于提供安装时的倾角参照物。水平标尺和倾角标尺,为安装人员提供了方向和角度的参照对象,便于安装人员进行安装。
如图4所示,可选的,在本发明实施例中,所述路侧信息感知设备还包括:至少一个安装凹槽,所述至少一个安装凹槽13位于所述壳体04的上端面,用于提供外接标定设备的安装接口;所述外接标定设备包括外接全球定位系统模块、外接姿态角传感器和/或外接电子罗盘。路侧信息感知设备在安装于路侧时,需要外接标定设备,来检测安装位置及安装角度的准确性,因此,在路侧信息感知设备的上端面设置一个或多个安装凹槽13,用来为外接全球定位系统模块、外接姿态角传感器和/或外接电子罗盘提供安装接口。
可选的,在本发明实施例中,所述路侧信息感知设备,还包括:显示屏幕,所述显示屏幕位于所述壳体04的上端面,用于显示所述内置全球定位系统模块07的经纬度信息、所述内置角度测量模块08的倾斜角度信息和/或所述内置电子罗盘09的方向角信息。如果在路侧信息感知设备中,已包括了内置的标定设备,即内置全球定位系统模块07、内置角度测量模块08和/或内置电子罗盘09,可以在壳体04的上端面设置显示屏幕,显示屏幕与控制模块01连接,并通过控制模块01,显示经纬度信息、倾斜角度信息和/或方向角信息,以便于工作人员安装;显示屏幕上方可以包括保护翻盖,用于防止显示屏幕损坏;保护翻盖打开时,显示屏幕展示在壳体04表面,保护翻盖关闭时,显示屏幕展示被遮挡在保护翻盖下。
可选的,在本发明实施例中,所述路侧信息感知设备还包括:散热片;所述散热片,位于所述壳体04的开孔处,用于降低所述路侧信息感知设备的内部温度。
本发明实施例中的路侧信息感知设备,将雷达探测模块和摄像组件集成在一个壳体内部,且位于邻近的固定位置,避免了对雷达探测模块和摄像组件之间相对位置、相对角度和相对方向角的标定,针对相同的交通区域,提供了丰富的道路感知信息,同时,通过控制模块的运行控制,保证了雷达探测模块获取的交通参与者的方位信息,与摄像组件获取的道路交通图像在时间戳上的同步性。
注意,上述仅为本发明的较佳实施例及所运用技术原理。本领域技术人员会理解,本发明不限于这里所述的特定实施例,对本领域技术人员来说能够进行各种明显的变化、重新调整和替代而不会脱离本发明的保护范围。因此,虽然通过以上实施例对本发明进行了较为详细的说明,但是本发明不仅仅限于以上实施例,在不脱离本发明构思的情况下,还可以包括更多其他等效实施例,而本发明的范围由所附的权利要求范围决定。
- 一种路侧信息感知设备
- 面向智慧公路的多源交通信息感知路侧设备