一种焊接机器人机械手臂
文献发布时间:2023-06-19 11:34:14
技术领域
本发明涉及的是焊接设备相关的技术领域,具体涉及的是一种焊接机器人机械手臂。
背景技术
焊接机器人是从事焊接(包括切割与喷涂)的工业机器人。根据国际标准化组织(ISO)工业机器人属于标准焊接机器人的定义,工业机器人是一种多用途的、可重复编程的自动控制操作机(Manipulator),具有三个或更多可编程的轴,用于工业自动化领域。但是,现有的机器人焊接手臂还存在着,不便于滑动并进行焊接,因此发明一种机器人焊接手臂显得非常必要。
发明内容
本发明目的是提供一种焊接机器人机械手臂,它能有效地解决背景技术中所存在的问题。
为了解决背景技术中所存在的问题,它包含可以控制手臂作径向方向调整的上臂总成1和可以控制手臂作圆周方向调整的下臂总成2,所述的上臂总成1与下臂总成2之间通过连板3焊接固定成一个整体,所述的上臂总成1与下臂总成2之间为上下镜像设置;
所述的上臂总成1整体为一个底部设置有开口的圆柱形结构,该上臂总成1的内部安装有上臂电机4,所述上臂电机4的动力输出轴端轴向国定安装有一个整体为圆盘状结构的第一安装盘5,该第一安装盘5的外圆面处焊接固定有一根第一连杆6,所述第一连杆6与第一安装盘5相对一端的端部焊接固定有一个耳座7;
所述下臂总成2整体为一个顶部设置有开口的圆柱形结构,该下臂总成2内部安装有下臂电机8,所述下臂电机8的动力输出轴端轴向国定安装有一个整体为圆盘状结构的第二安装盘9,该第二安装盘9的外圆面处焊接固定有一根第二连杆10,所述第二连杆10与第二安装盘9相对一端的端部焊接固定有一个导向滑槽11,该导向滑槽11的内部设置有沿其长度方向布置的槽口13,所述槽口13的内部设置有一个可以沿其长度方向水平移动的滑块12,所述滑块12的端面焊接固定有焊接手臂14,该焊接手臂14的端部延伸出槽口13与焊枪设备安装板15固定连接成一个整体;
所述的耳座7内设置有一个可以与其转动连接配合的转动座16,该转动座16的一侧焊接固定有驱动连杆17,所述驱动连杆17与转动座16相对一端的端部固定安装有一个定位座18,该定位座18通过铰轴与滑块12转动连接配合。
所述上臂总成1的内部安装有一个上臂电机座19,所述的上臂电机4安装在上臂电机座19内。
所述下臂总成2的内部安装有一个下臂电机座20,所述的下臂电机8安装在下臂电机座20内。
由于采用了以上技术方案,本发明具有以下有益效果:通过上臂电机与下臂电机的驱动能够有效的驱动焊接手臂作径向方向和周向方向的调整,提高了焊接手臂工作过程中的整体工作效率。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
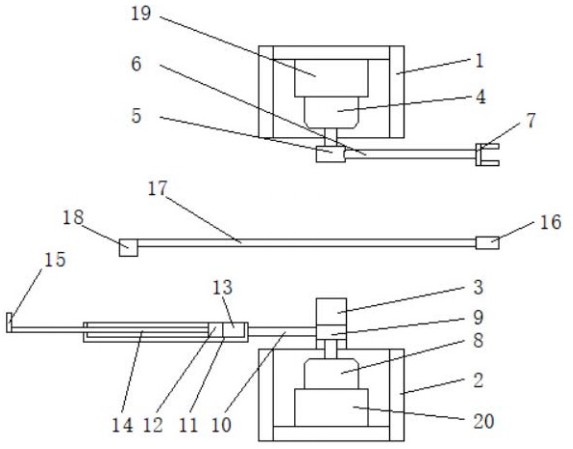
图1是本发明的结构示意图。
具体实施方式
为了使本发明实现的技术手段、创作特征、达成目的与功效易于明白了解,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述。
参看图1,本具体实施方式是采用以下技术方案予以实现,它包含可以控制手臂作径向方向调整的上臂总成1和可以控制手臂作圆周方向调整的下臂总成2,所述的上臂总成1与下臂总成2之间通过连板3焊接固定成一个整体,所述的上臂总成1与下臂总成2之间为上下镜像设置;
所述的上臂总成1整体为一个底部设置有开口的圆柱形结构,该上臂总成1的内部安装有上臂电机4,所述上臂电机4的动力输出轴端轴向国定安装有一个整体为圆盘状结构的第一安装盘5,该第一安装盘5的外圆面处焊接固定有一根第一连杆6,所述第一连杆6与第一安装盘5相对一端的端部焊接固定有一个耳座7;
所述下臂总成2整体为一个顶部设置有开口的圆柱形结构,该下臂总成2内部安装有下臂电机8,所述下臂电机8的动力输出轴端轴向国定安装有一个整体为圆盘状结构的第二安装盘9,该第二安装盘9的外圆面处焊接固定有一根第二连杆10,所述第二连杆10与第二安装盘9相对一端的端部焊接固定有一个导向滑槽11,该导向滑槽11的内部设置有沿其长度方向布置的槽口13,所述槽口13的内部设置有一个可以沿其长度方向水平移动的滑块12,所述滑块12的端面焊接固定有焊接手臂14,该焊接手臂14的端部延伸出槽口13与焊枪设备安装板15固定连接成一个整体;
所述的耳座7内设置有一个可以与其转动连接配合的转动座16,该转动座16的一侧焊接固定有驱动连杆17,所述驱动连杆17与转动座16相对一端的端部固定安装有一个定位座18,该定位座18通过铰轴与滑块12转动连接配合。
所述上臂总成1的内部安装有一个上臂电机座19,所述的上臂电机4安装在上臂电机座19内。
所述下臂总成2的内部安装有一个下臂电机座20,所述的下臂电机8安装在下臂电机座20内。
由于采用了以上技术方案,本发明具有以下有益效果:通过上臂电机与下臂电机的驱动能够有效的驱动焊接手臂作径向方向和周向方向的调整,提高了焊接手臂工作过程中的整体工作效率。
最后应说明的是:以上实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的精神和范围。
- 一种焊接机器人机械手臂
- 一种用于焊接的机器人机械手臂