解码器侧运动矢量细化
文献发布时间:2023-06-19 11:34:14
本申请要求享受于2019年11月26日提交的美国申请号16/695,907和于2018年11月27日提交的美国临时申请号62/771,960的权益,上述美国申请中的每一个的全部内容通过引用的方式合并入本文。
技术领域
本公开内容涉及视频译码,包括视频编码和视频解码。
背景技术
数字视频能力可以被合并到各种各样的设备中,包括数字电视机、数字直播系统、无线广播系统、个人数字助理(PDA)、膝上型计算机或台式计算机、平板计算机、电子书阅读器、数字相机、数字记录设备、数字媒体播放器、视频游戏设备、视频游戏控制台、蜂窝或卫星无线电电话(所谓的“智能电话”)、视频电话会议设备、视频流设备等。数字视频设备实现视频译码技术(诸如在由MPEG-2、MPEG-4、ITU-T H.263、ITU-T H.264/MPEG-4(第10部分,高级视频译码(AVC))、高效率视频译码(HEVC)标准、ITU-T H.265/高效率视频译码(HEVC)所定义的标准以及此类标准的扩展中描述的那些技术)。通过实现这样的视频译码技术,视频设备可以更加高效地发送、接收、编码、解码和/或存储数字视频信息。
视频译码技术包括空间(图片内)预测和/或时间(图片间)预测以减少或去除在视频序列中固有的冗余。对于基于块的视频译码,视频切片(例如,视频图片或视频图片的一部分)可以被分割为视频块,视频块也可以被称为译码树单元(CTU)、译码单元(CU)和/或译码节点。图片的经帧内译码(I)的切片中的视频块是使用相对于同一图片中的相邻块中的参考样本的空间预测来编码的。图片的经帧间译码(P或B)的切片中的视频块可以使用相对于同一图片中的相邻块中的参考样本的空间预测或者相对于其它参考图片中的参考样本的时间预测。图片可以被称为帧,并且参考图片可以被称为参考帧。
发明内容
通常,本公开内容描述了用于改善解码器侧运动矢量细化(DMVR)的技术。它可以应用于任何现有的视频编解码器,例如HEVC(高效视频编码)或VVC(通用视频编码),或者是任何未来视频译码标准中的有效译码工具。例如,诸如视频编码器和视频解码器之类的视频译码设备可以被配置为对要在其上执行DMVR的块尺寸进行限制。具体地,如果块具有的宽度或高度小于8个像素,或者尺寸等于8×8像素,则可以避免DMVR。否则,对于具有尺寸至少为8×N或N×8的块,其中N是大于8的整数,可以执行DMVR。
在一个示例中,一种对视频数据进行译码的方法包括:确定视频数据的块具有以下各项中的至少一项:宽度小于8个像素、高度小于8个像素、或者宽度和高度等于8个像素;响应于确定视频数据的所述块具有以下各项中的至少一项:所述宽度小于8个像素、所述高度小于8个像素、或者所述宽度和所述高度等于8个像素,确定不使用解码器侧运动矢量细化(DMVR)对所述块进行译码;以及,响应于确定不使用DMVR对所述块进行译码,在不对所述块执行DMVR的情况下对所述块进行译码。
在另一示例中,一种用于对视频数据进行译码的设备,所述设备包括:存储器,其被配置为存储视频数据;以及一个或多个处理器,其在电路中实现并被配置为:确定视频数据的块具有以下各项中的至少一项:宽度小于8个像素、高度小于8个像素、或者宽度和高度等于8个像素;响应于确定视频数据的所述块具有以下各项中的至少一项:所述宽度小于8个像素、所述高度小于8个像素、或者所述宽度和所述高度等于8个像素,确定不使用解码器侧运动矢量细化(DMVR)对所述块进行译码;以及响应于确定不使用DMVR对所述块进行译码,在不对所述块执行DMVR的情况下对所述块进行译码。
在另一示例中,一种具有存储在其上的指令的计算机可读存储介质,当执行所述指令时使得处理器进行以下操作:确定视频数据的块具有以下各项中的至少一项:宽度小于8个像素、高度小于8个像素、或者宽度和高度等于8个像素;响应于确定视频数据的所述块具有以下各项中的至少一项:所述宽度小于8个像素、所述高度小于8个像素、或者所述宽度和所述高度等于8个像素,确定不使用解码器侧运动矢量细化(DMVR)对所述块进行译码;以及,响应于确定不使用DMVR对所述块进行译码,在不对所述块执行DMVR的情况下对所述块进行译码。
在另一示例中,一种用于对视频数据进行译码的设备,所述设备包括:用于确定视频数据的块具有以下各项中的至少一项:宽度小于8个像素、高度小于8个像素、或者宽度和高度等于8个像素的单元;用于响应于确定视频数据的所述块具有以下各项中的至少一项:所述宽度小于8个像素、所述高度小于8个像素、或者所述宽度和所述高度等于8个像素,确定不使用解码器侧运动矢量细化(DMVR)对所述块进行译码的单元;以及,用于响应于确定不使用DMVR对所述块进行译码,在不对所述块执行DMVR的情况下对所述块进行译码的单元。
在附图和以下描述中阐述了一个或多个示例的细节。根据说明书、附图和权利要求书,其它特征、目的和优点将是清楚的。
附图简要说明
图1A和图1B是示出用于运动矢量预测的空间相邻候选的概念图。
图2A和图2B是示出时间运动矢量预测的概念图。
图3A和图3B是表示合并运动矢量细化的概念图。
图4是示出偏移合并候选的示例的概念图。
图5A和图5B是示出双边模板匹配的示例的概念图。
图6是示出用于解码器侧运动矢量推导(DMVD)的阶段的示例流水线的概念图。
图7是示出用于双向光流(BIO)的示例性光流轨迹的概念图。
图8是示出针对8×4块的BIO期间的梯度计算的示例的概念图。
图9是示出可以执行本公开内容的技术的示例视频编码和解码系统的框图。
图10A和图10B是示出用于减少与使用经细化的运动矢量来执行BIO相关联的存储器带宽的示例技术的概念图。
图11是示出跨译码树单元(CTU)的虚拟流水线数据单元(VPDU)的示例处理顺序的概念图。
图12是示出其中仅水平填充用于水平插值的技术的概念图。
图13A和图13B是示出示例四叉树二叉树(QTBT)结构以及对应的译码树单元(CTU)的概念图。
图14是示出可以执行本公开内容的技术的示例视频编码器的框图。
图15是示出可以执行本公开内容的技术的示例视频解码器的框图。
图16是示出根据本公开内容的技术的对当前块进行编码的示例方法的流程图。
图17是示出根据本公开内容的技术的对当前块进行解码的示例方法的流程图。
图18是示出根据本公开内容的技术的对视频数据的块进行译码的方法的示例的流程图。
具体实施方式
视频译码标准包括ITU-T H.261、ISO/IEC MPEG-1视觉、ITU-T H.262或ISO/IECMPEG-2视觉、ITU-T H.263、ISO/IEC MPEG-4视觉、以及ITU-T H.264(也被称为ISO/IECMPEG-4AVC)(包括其可伸缩视频译码(SVC)和多视角视频译码(MVC)扩展)。
此外,ITU-T视频译码专家组(VCEG)和ISO/IEC运动图像专家组(MPEG)的视频编码联合协作组(JCT-VC)以及3D视频编码扩展开发联合协作组(JCT-3V)已经开发了高效视频编码(HEVC)或ITU-T H.265,包括其范围扩展、多视图扩展(MV-HEVC)以及可伸缩扩展(SHVC)。可以从phenix.int-evry.fr/jct/doc_end_user/documents/14_Vienna/wg11/JCTVC-N1003-v1.zip获得HEVC草案规范(下文被称为HEVC WD)。
ITU-T VCEG(Q6/16)和ISO/IEC MPEG(JTC 1/SC 29/WG 11)现在正在研究对未来视频译码技术(具有显著超过当前HEVC标准(包括其当前扩展、以及针对屏幕内容译码和高动态范围译码的近期扩展)的压缩能力)的标准化的潜在需求。这些组在被称为联合视频探索小组(JVET)的联合协作活动中共同致力于这一探索活动,以评估他们在这一领域的专家提出的压缩技术设计。JVET于2015年10月19-21日首次会面。参考软件的一个版本(即,联合探索模型7(JEM 7))可以从如下网址下载:jvet.hhi.fraunhofer.de/svn/svn_HMJEMSoftware/tags/HM-16.6-JEM-7.0/。从phenix.it-sudparis.eu/jvet/doc_end_user/current_document.php?id=3286可得到JEM-7的算法描述。
在HEVC中,切片中的最大译码单元被称为译码树块(CTB)或译码树单元(CTU)。CTB包含四叉树,该四叉树的节点是译码单元。在HEVC主简档中,CTB的尺寸范围可以从16×16到64×64(尽管在技术上可以支持8×8CTB尺寸)。译码单元(CU)可以是与CTB的相同尺寸,小到8×8。每个译码单元可以以一种模式(即,帧间或帧内)进行译码。当CU被帧间译码时,其可以被进一步分割为2或4个预测单元(PU),或者当不应用进一步分割时成为仅仅一个PU。当在一个CU中有两个PU时,它们可以是一半尺寸的矩形,或者具有CU的1/4或3/4尺寸的两个矩形尺寸。当CU被帧间译码时,每个PU具有一个运动信息集合,所述运动信息集合是以唯一帧间预测模式进行推导的。
在HEVC标准中,存在两种帧间预测模式,分别叫做针对预测单元(PU)的合并(跳过被视为合并的特殊情况)和高级运动矢量预测(AMVP)模式。在AMVP或合并模式中,针对多个运动矢量预测量,保留运动矢量(MV)候选列表。当前PU的合并模式中的运动矢量以及参考索引是通过从MV候选列表中选取一个候选来生成的。MV候选列表包含针对合并模式的多达5个候选以及针对AMVP模式的仅两个候选。合并候选可以包含运动信息集合,例如,与两个参考图片列表(列表0和列表1)相对应的运动矢量和参考索引。如果合并候选是由合并索引进行标识,则确定用于当前块的预测的参考图片以及相关联的运动矢量。另一方面,在AMVP模式下,针对来自列表0或列表1的每个潜在预测方向,需要显式地以信号发送参考索引、以及对MV候选列表的MV预测量(MVP)索引,因为AMVP候选仅包含运动矢量。在AMVP模式中,可以进一步细化预测运动矢量。从相同的空间和时间相邻块来类似地推导针对两种模式的候选。
图1A和图1B是示出用于运动矢量预测的空间相邻候选的概念图。特别地,图1A示出了用于合并模式的空间相邻候选的示例,而图1B示出了用于高级运动矢量预测(AMVP)模式的空间相邻候选的示例。针对具体PU(PU0),空间MV候选是从图1A和图1B中所示的相邻块中推导出的,尽管用于从块生成候选的方法针对合并和AMVP模式有所不同。在HEVC的合并模式中,多达四个空间MV候选能够以图1A中所示的具有数字的顺序进行推导。并且所述顺序如下:左(0,A1)、上方(1,B1)、右上方(2,B0)、左下方(3,A0)和左上方(4,B2)。
在AVMP模式下,相邻块被分为两组:左组包括块0和1,而上组包括块2、3和4,如图1B中所示。对于每个组,在相邻块中的引用与以信号发送的参考索引所指示的相同参考图片的潜在候选具有要被选择以形成该组的最终候选的最高优先级。可能并非所有相邻块都包含指向同一参考图片的运动矢量。因此,如果无法找到这样的候选,则第一个可用候选将缩放以形成最终候选;因此,可以补偿时间距离差。
图2A和图2B是示出时间运动矢量预测的概念图。特别地,图2A描绘了时间运动矢量预测(TMVP)候选,而图2B描绘了运动矢量伸缩。如果TMVP候选被启用且可用,则可以添加到MV候选列表中的位于HEVC中的空间运动矢量候选的后面。针对TMVP候选的运动矢量推导过程针对合并和AMVP模式是相同的。但是,在合并模式中,每个HEVC针对TMVP候选的目标参考索引始终设置为0。
用于TMVP候选推导的主块位置是位于共置的PU的外部的右下块,如图2A中示为块“T”,以补偿对用于生成空间相邻候选的上方和左侧块的偏差。但是,如果该块位于当前CTB行之外,或者运动信息是不可用的,则可以用PU的中心块来替换该块。
可以从以切片级别所指示的共置图片的共置PU来推导针对TMVP候选的运动矢量。针对同一位置的PU的运动矢量被称为共置MV。类似于AVC中的时间直接模式,为了推导出TMVP候选运动矢量,可能需要缩放共置MV以补偿时间距离差,如图2B中所示。
图3A和图3B是表示合并运动矢量细化的概念图。在JVET-L0054中,提出了合并运动矢量细化(MMVR,又称最终运动矢量表达式,UMVE),以基于以信号发送的运动矢量差来细化合并候选的运动矢量。MMVR提供了具有简化信令的可选运动矢量表达式,包括起点、运动幅度和运动方向。可以使用图3B中所描绘的对由未经细化的合并运动矢量所指向的位置为中心的十字形图案的偏移之一来细化合并运动。另外,指向列表L0中的参考图片的MV偏移(即,经细化的MV减去原始MV)被缩放到列表L1中的参考图片。
图4是示出偏移合并候选的示例的概念图。在JVET-L0176中,基于合并候选列表的第一候选来构造新扩展MV偏移候选。新扩展MV偏移候选仅具有相对于第一候选的当前MV的MV偏移,并且其它预测信息是与第一候选相同的。将新添加的候选推入到合并候选列表中,位于时间候选之后。所支持的运动矢量偏移是在图4中描绘的,包括具有偏移(0或±1、0或±1)的水平和垂直阴影点以及具有偏移(0或±2、0或±2)的对角阴影点。
对于使用来自过去的参考图片的一个MV(即,MV0)和来自未来情形中的参考图片的另一MV(即,MV1)进行双向预测的情况,视频译码器可以将所选择的MV偏移添加到第一候选MV0,并且将反向MV偏移添加到第一候选MV1。在其它双向预测情况下,视频译码器可以将相同的MV偏移分别添加到第一候选MV0和MV1。
基于历史的运动矢量预测(HMVP)(在JVET-K0104中进行了描述)是一种基于历史的方法,该方法允许每个块除了紧邻的因果相邻运动场中以外,还从过去解码的MV列表中找到其MV预测量。在编码/解码过程期间,将维护具有多个HMVP候选的表。当遇到新切片时,将清空该表。每当有经帧间译码的块时,相关联运动信息就以先进先出(FIFO)的方式插入到该表中,作为新HMVP候选。然后,可以应用受约束的FIFO规则。当向该表中插入HMVP时,首先应用冗余检查以便找到在该表中是否有相同的HMVP。如果找到,则从表中删除该特定HMVP,然后移动所有HMVP候选。
HMVP候选可以用于合并候选列表构建过程中。从表中的最后一个条目到第一个条目的所有HMVP候选都插入到TMVP候选之后。修剪应用于HMVP候选。一旦可用的合并候选的总数达到以信号发送的最大允许合并候选,则合并候选列表构建过程终止。
类似地,HMVP候选也可以用于AMVP候选列表构建过程中。将表中的最后K个HMVP候选的运动矢量插入到TMVP候选之后。仅将具有与AMVP目标参考图片相同的参考图片的HMVP候选用于构造AMVP候选列表。修剪应用于HMVP候选。
可以在合并和/或AMVP模式期间执行运动矢量伸缩。假设运动矢量的值是与呈现时间中的图片的距离成比例的。运动矢量将如下两个图片相关联:参考图片和包含运动矢量的图片(叫做包含图片)。当利用运动矢量来预测另一运动矢量时,基于图片顺序计数(POC)值来计算包含图片和参考图片的距离。
对于要被预测的运动矢量,其相关联的包含图片和参考图片可以是不同的。因此,可以计算新距离(基于POC)。并且可以基于这两个POC距离来伸缩运动矢量。对于空间相邻候选,针对两个运动矢量的包含图片是相同的,而参考图片是不同的。在HEVC中,运动矢量伸缩适用于针对空间和时间相邻候选的TMVP和AMVP两者。
人工运动矢量候选生成也可以在合并和/或AMVP模式期间执行。如果运动矢量候选列表不是完整的,则可以生成人工运动矢量候选并将其插入列表的末尾,直到它具有预定数量的候选为止。
在HEVC的合并模式中,存在两种类型的人工MV候选:仅针对B切片推导出的组合候选、以及仅用于AMVP的零候选(如果第一类型没有提供足够的人工候选)。对于已经在候选列表中并且具有必要运动信息的每一对候选,通过引用在列表0中的图片的第一候选的运动矢量和引用在列表1中的图片的第二个候选的运动矢量的组合来推导出双向组合运动矢量候选。
可以在HEVC的合并和/或AMVP模式期间执行用于候选插入的修剪过程。来自不同块的候选可能恰好是相同的,这可能会降低合并/AMVP候选列表的效率。可以应用修剪过程来解决此问题。此过程将一个候选与当前候选列表中的其他候选进行比较,以便在一定程度上避免插入相同的候选。为了降低复杂度,仅应用了有限数量的修剪过程,而不是将每个潜在候选与所有其他现有候选进行比较。
图5A和图5B是示出双边模板匹配的示例的概念图。双边匹配是DMVR技术的变型,其可以避免基于模板的细化过程。该技术直接地计算由初始双向预测MV(例如,图5A和图5B中的v0和v1)所指向的单向预测参考块(表示为I
在找到最佳Δ*后,迭代过程使用Δ*来更新初始MV(v
在JVET-K0041中,使用二次参数函数来形成针对每个可能的分数像素MV的预测误差曲面。基本上,它是插值函数,其可以将预测误差的值作为估计量进行插值。基于来自整数搜索的准确预测误差值,可以推导出二次参数函数的参数,从而可以找到关于该误差搜索的最佳运动采样位置。然后,将初始MV调整到该准确运动采样位置,而不是实际执行子像素运动矢量估计。该参数函数将来自5个点的成本值作为参考,以形成误差曲面,并在该曲面上找到具有最低成本值的最佳位置。这5个点形成十字形,并且每两个相邻点之间的间隙是2个像素,其中,中心/左/右/上/下点的坐标位于(0,0)/(-1,0)/(1,0)/(0,-1)/(0,1)。
在一些示例中,该参数误差曲面函数是2D抛物线误差曲面方程:
E
其中,(Δx,Δy)对应于具有最小成本的位置,并且C对应于最小成本值。
通过求解5个未知数中的5个方程,可以将(Δx,Δy)计算为:
Δx=floor((α(E
Δy=floor((α(E
其中,α是被引入以一定的亚像素精度来表示(Δx,Δy)的整数伸缩因子,例如,16针对1/16精度,而4针对1/4精度。
尽管DMVD在减少运动开销方面是有效的,但是由于空间相邻CU的译码之间的相互依赖性,现有DMVD设计(例如DMVR)可能会遇到解码时延问题。如果CU的MV是从通过使用DMVR而译码的其空间邻居进行预测的,则其解码过程必须等待,直到邻居CU的细化MV变为可用为止。在新译码标准(通用视频译码)的开发中,有该公开内容的几种技术来实现用于一些解码器侧MV推导(DMVD)方法的低时延设计。
本公开内容的技术可以用于改善DMVR和DMVD的性能。例如,可以对向其应用DMVR的块施加尺寸限制。特别地,DMVR可以被约束到具有尺寸大于8×8像素的块。也就是说,如果块的一个维度(块的宽度或高度)等于8个像素,则正交维度应当大于8个像素,以便对该块执行DMVR。通过以这种方式约束DMVR,可以在不负面影响失真的情况下改善块译码过程。
图6是示出用于解码器侧运动矢量推导(DMVD)的阶段的示例流水线的概念图。对于使用DMVD进行译码的块,解码过程可以被解析为三个步骤:(1)初始运动场的重构,以及预取参考块;(2)针对块运动的细化过程以获得最终MV;(3)具有最终MV的运动补偿。
在步骤2中的细化过程之后,最终MV被写回到图像运动场,因此,可以将经细化的MV用作空间MV预测,时间MV预测和边界强度计算。图6示出了用于诸如解码器侧MV细化(DMVR)之类的DMVD方法的流水线阶段的某种实现方式。在图6中,3个主模块表示用于DMVD方法的3个解码步骤。
首先,CU
在一些示例中,取代使用经细化的MV,每个DMVR CU的初始MV可以用于推导出空间MV预测量。对于时间MV预测,可以使用经细化的MV,而不会有解码时延问题,因为共置图片已被完全重构。因此,由于空间相邻CU之间的译码依赖性不再存在,因此能够彻底解决DMVR的解码时延问题。但是,可以预期译码性能的下降。
在一些示例中,如果紧邻块与当前一个块一起都落入同一CTU行中,则未细化的MV可以用作与这些相邻块的参考以执行空间MV预测。(注意,一些其它技术可能会将来自这些相邻块的MV预测量标记为不可用。)相反,当经细化的MV的相关联块落入位于正上方CTU和左上方CTU处的相邻因果CTU内时,经细化的MV可能仅可用于空间MV预测。因此,一些示例打破了在CTU行内的MV细化与空间MV预测之间的相互依赖性。
图7是示出用于双向光流(BIO)的示例光流轨迹的概念图。BIO是在双向预测情况下对逐块运动补偿之上执行的逐像素运动细化。由于BIO补偿了块内的细化运动,因此启用BIO可能会导致增大用于运动补偿的块尺寸。样本级运动细化不要求穷举搜索或以信号发送,因为存在明确的方程式,该方程式针对每个样本提供了细化运动矢量。
令I
将光流方程式与针对每个样本的运动轨迹的Hermite插值相结合,获得了唯一的三阶多项式,该多项式在末端与函数值I
此处τ
运动矢量场(v
(1)中的所有值都取决于样本位置(i',j'),其至今被省略。假设运动在局部周围是一致的,我们对以当前预测点(i,j)为中心的(2M+1)×(2M+1)方窗Ω内的Δ进行最小化:
针对该优化问题,我们使用简化方案,该简化方案首先在垂直方向上并且然后在水平方向上进行最小化。其结果:
其中,
为了避免除以零或极小值,在等式(2)、(3)中引入正则化参数r和m。
r=500·4
m=700·4
此处,d是输入视频的内部比特深度。
在某些情况下,由于噪音或不规则运动,BIO的MV组可能不可靠。因此,在BIO中,MV组的幅度被截短到某个阈值thBIO。基于当前图片的所有参考图片是否都来自一个方向,来确定阈值。如果当前图片的当前图片的所有参考图片都来自一个方向,则阈值设置为12×2
使用符合HEVC运动补偿过程(2D可分离FIR)的操作,利用运动补偿插值同时计算BIO的梯度。针对该2D可分离FIR的输入是与运动补偿过程相同的参考帧样本,并且根据块运动矢量的小数部分,是小数位置(fracX,fracY)。如果首先使用与具有缩小比例移动d-8的小数位置fracY相对应的BIOfilterS对水平梯度
图8是示出针对8×4块的BIO期间的梯度计算的示例的概念图。对于8×4的块,视频译码器可以获取运动补偿预测量,并且计算块内的所有像素以及像素的外部两行的水平和垂直梯度,因为求解针对每个像素的vx和vy需要以每个像素为中心的窗口Ω内的像素的水平和垂直梯度值和运动补偿预测量,如等式(4)中所示。并且在JEM中,该窗口的尺寸设置为5×5。因此,视频译码器需要获取运动补偿预测量,并且计算针对像素的外部两行的梯度。在JEM中,当两个预测来自不同参考图片时,BIO应用于所有的双向预测块。当针对CU启用LIC时,禁用BIO。
JVET-C0047中提出了广义双向预测(GBi)。JVET-K0248改进了针对GBi的增益复杂度折衷,并且被采纳进了BMS2.1中。BMS2.1GBi在双向预测模式中将不相等的权重应用于来自L0和L1的预测量。在帧间预测模式中,基于速率失真优化(RDO)来评估包括相等权重对(1/2,1/2)的多个权重对,并且将选定的权重对的GBi索引以信号发送给解码器。在合并模式中,GBi索引是从相邻的CU承继的。在BMS2.1GBi中,在双向预测模式中的预测量生成如下所示。
P
其中,P
对于非低延迟图片,权重集尺寸从5减小到3,其中,w
本公开内容认识到DMVD相关方法(PMMVD、双边模板匹配、解码器侧MV细化等)提供了显著的译码性能改善。这些现有技术中的一些已经进一步部分或完全地(以译码效率为代价)解决了解码器侧MV推导过程和空间MV预测之间的相互依赖性问题(也称为解码时延问题)。同样,当在BIO中、基于历史的合并候选和仿射合并候选中涉及DMVR的许多应用场景中,也会发生相同的解码时延问题。但是,应当关于以下方面来指定某些用例:1)如何使用经细化的MV,以及2)当无法访问经细化的MV时如何能够替换经细化的MV。此外,可以改进GBi、加权双向预测、MMVR、合并偏移扩展和DMVR填充过程的当前设计,以尽量利用DMVR来减少内存缓存区尺寸和计算复杂度。本公开内容的技术可以解决这些和其他问题,从而改善视频译码(编码和/或解码)的技术领域,以及改善执行视频译码的设备,例如,视频编码器和视频解码器。
图9是示出可以执行本公开内容的技术的示例视频编码和解码系统100的框图。概括而言,本公开内容的技术涉及对视频数据进行译码(编码和/或解码)。通常,视频数据包括用于处理视频的任何数据。因此,视频数据可以包括原始的未经译码的视频、经编码的视频、经解码(例如,经重构)的视频、以及视频元数据(例如,信令数据)。
如图9所示,在该示例中,系统100包括源设备102,源设备102提供要被目的地设备116解码和显示的、经编码的视频数据。具体地,源设备102经由计算机可读介质110来将视频数据提供给目的地设备116。源设备102和目的地设备116可以包括各种各样的设备中的任何一种,包括台式计算机、笔记本计算机(即,膝上型计算机)、平板计算机、机顶盒、诸如智能电话之类的电话手机、电视机、相机、显示设备、数字媒体播放器、视频游戏控制台、视频流设备等。在一些情况下,源设备102和目的地设备116可以被配备用于无线通信,并且因此可以被称为无线通信设备。
在图9的示例中,源设备102包括视频源104、存储器106、视频编码器200以及输出接口108。目的地设备116包括输入接口122、视频解码器300、存储器120以及显示设备118。根据本公开内容,源设备102的视频编码器200和目的地设备116的视频解码器300可以被配置为应用用于改善DMVR的技术。因此,源设备102表示视频编码设备的示例,而目的地设备116表示视频解码设备的示例。在其它示例中,源设备和目的地设备可以包括其它组件或布置。例如,源设备102可以从诸如外部相机之类的外部视频源接收视频数据。同样,目的地设备116可以与外部显示设备对接,而不是包括集成显示设备。
如图9所示的系统100仅是一个示例。通常,任何数字视频编码和/或解码设备可以执行用于改善DMVR的技术。源设备102和目的地设备116仅是这样的译码设备的示例,其中,源设备102生成经译码的视频数据以用于传输给目的地设备116。本公开内容将“译码”设备指代为执行对数据的译码(例如,编码和/或解码)的设备。因此,视频编码器200和视频解码器300分别表示译码设备(具体地,视频编码器和视频解码器)的示例。在一些示例中,源设备102和目的地设备116可以以基本上对称的方式进行操作,使得源设备102和目的地设备116中的每一者都包括视频编码和解码组件。因此,系统100可以支持在源设备102和目的地设备116之间的单向或双向视频传输,例如,以用于视频流、视频回放、视频广播或视频电话。
通常,视频源104表示视频数据(即原始的未经译码的视频数据)的源,并且将视频数据的顺序的一系列图片(也被称为“帧”)提供给视频编码器200,视频编码器200对用于图片的数据进行编码。源设备102的视频源104可以包括视频捕获设备,诸如摄像机、包含先前捕获的原始视频的视频存档单元、和/或用于从视频内容提供者接收视频的视频馈送接口。作为另外的替代方式,视频源104可以生成基于计算机图形的数据作为源视频,或者生成实时视频、被存档的视频和计算机生成的视频的组合。在每种情况下,视频编码器200可以对被捕获的、预捕获的或计算机生成的视频数据进行编码。视频编码器200可以将图片从所接收的顺序(有时被称为“显示顺序”)重新排列为用于译码的译码顺序。视频编码器200可以生成包括经编码的视频数据的比特流。然后,源设备102可以经由输出接口108将经编码的视频数据输出到计算机可读介质110上,以便由例如目的地设备116的输入接口122接收和/或取回。
源设备102的存储器106和目的地设备116的存储器120表示通用存储器。在一些示例中,存储器106、120可以存储原始视频数据,例如,来自视频源104的原始视频以及来自视频解码器300的原始的经解码的视频数据。另外或替代地,存储器106、120可以存储可由例如视频编码器200和视频解码器300分别执行的软件指令。尽管在该示例中存储器106、120被示为与视频编码器200和视频解码器300分开,但是应当理解的是,视频编码器200和视频解码器300还可以包括用于在功能上类似或等效目的的内部存储器。此外,存储器106、120可以存储例如从视频编码器200输出并且输入到视频解码器300的经编码的视频数据。在一些示例中,存储器106、120的部分可以被分配为一个或多个视频缓存器,例如,以存储原始的经解码和/或经编码的视频数据。
计算机可读介质110可以表示能够将经编码的视频数据从源设备102输送到目的地设备116的任何类型的介质或设备。在一个示例中,计算机可读介质110表示通信介质,其使得源设备102能够例如经由射频网络或基于计算机的网络,来实时地向目的地设备116直接发送经编码的视频数据。输出接口108可以根据诸如无线通信协议之类的通信标准来对包括经编码的视频数据的传输信号进行调制,并且输入接口122可以根据诸如无线通信协议之类的通信标准来对所接收的传输信号进行解调。通信介质可以包括任何无线或有线通信介质,例如,射频(RF)频谱或一条或多条物理传输线。通信介质可以形成诸如以下各项的基于分组的网络的一部分:局域网、广域网、或诸如互联网之类的全球网络。通信介质可以包括路由器、交换机、基站、或对于促进从源设备102到目的地设备116的通信而言可以有用的任何其它设备。
在一些示例中,源设备102可以将经编码的数据从输出接口108输出到存储设备112。类似地,目的地设备116可以经由输入接口122从存储设备112访问经编码的数据。存储设备112可以包括各种分布式或本地访问的数据存储介质中的任何一种,诸如硬盘驱动器、蓝光光盘、DVD、CD-ROM、闪存、易失性或非易失性存储器、或用于存储经编码的视频数据的任何其它适当的数字存储介质。
在一些示例中,源设备102可以将经编码的视频数据输出到文件服务器114或者可以存储由源设备102生成的经编码的视频的另一中间存储设备。目的地设备116可以经由流式传输或下载来从文件服务器114存取被存储的视频数据。文件服务器114可以是能够存储经编码的视频数据并且将该经编码的视频数据发送给目的地设备116的任何类型的服务器设备。文件服务器114可以表示网页服务器(例如,用于网站)、文件传输协议(FTP)服务器、内容递送网络设备、或网络附加存储(NAS)设备。目的地设备116可以通过任何标准数据连接(包括互联网连接)来从文件服务器114访问经编码的视频数据。这可以包括适于访问被存储在文件服务器114上的经编码的视频数据的无线信道(例如,Wi-Fi连接)、有线连接(例如,数字用户线(DSL)、电缆调制解调器等)、或这两者的组合。文件服务器114和输入接口122可以被配置为根据以下各项来操作:流传输协议、下载传输协议、或其组合。
输出接口108和输入接口122可以表示无线发射机/接收机、调制解调器、有线联网组件(例如,以太网卡)、根据各种IEEE 802.11标准中的任何一种标准进行操作的无线通信组件、或其它物理组件。在其中输出接口108和输入接口122包括无线组件的示例中,输出接口108和输入接口122可以被配置为根据蜂窝通信标准(诸如4G、4G-LTE(长期演进)、改进的LTE、5G等)来传输数据(诸如经编码的视频数据)。在其中输出接口108包括无线发射机的一些示例中,输出接口108和输入接口122可以被配置为根据其它无线标准(诸如IEEE 802.11规范、IEEE 802.15规范(例如,ZigBee
本公开内容的技术可以应用于视频译码,以支持各种多媒体应用中的任何一种,诸如空中电视广播、有线电视传输、卫星电视传输、互联网流式视频传输(比如,基于HTTP的动态自适应流式传输(DASH))、被编码到数据存储介质上的数字视频、对被存储在数据存储介质上的数字视频的解码、或其它应用。
目的地设备116的输入接口122从计算机可读介质110(例如,通信介质、存储设备112、文件服务器114等)接收经编码的视频比特流。经编码的视频比特流可以包括由视频编码器200定义的诸如以下语法元素之类的信令信息(其也被视频解码器300使用):所述语法元素具有描述视频块或其它译码单元(例如,切片、图片、图片组、序列等)的特性和/或处理的值。显示设备118将经解码的视频数据的经解码的图片显示给用户。显示设备118可以表示各种显示设备中的任何一种,诸如阴极射线管(CRT)、液晶显示器(LCD)、等离子显示器、有机发光二极管(OLED)显示器、或另一种类型的显示设备。
尽管在图9中未示出,但是在一些示例中,视频编码器200和视频解码器300可以各自与音频编码器和/或音频解码器集成,并且可以包括适当的MUX-DEMUX单元或者其它硬件和/或软件,以处理包括公共数据流中的音频和视频两者的经复用的流。如果适用,MUX-DEMUX单元可以遵循ITU H.223复用器协议或其它协议(比如,用户数据报协议(UDP))。
视频编码器200和视频解码器300各自可以被实现为各种适当的编码器和/或解码器电路中的任何一种,比如,一个或多个微处理器、数字信号处理器(DSP)、专用集成电路(ASIC)、现场可编程门阵列(FPGA)、分立逻辑、软件、硬件、固件、或其任何组合。当所述技术部分地用软件实现时,设备可以将用于软件的指令存储在适当的非暂时性计算机可读介质中,并且使用一个或多个处理器,用硬件来执行指令以执行本公开内容的技术。视频编码器200和视频解码器300中的每一者可以被包括在一个或多个编码器或解码器中,编码器或解码器中的任一者可以被集成为相应设备中的组合编码器/解码器(CODEC)的一部分。包括视频编码器200和/或视频解码器300的设备可以包括集成电路、微处理器、和/或无线通信设备(比如,蜂窝电话)。
视频编码器200和视频解码器300可以根据视频译码标准(诸如ITU-T H.265(也被称为高效率视频译码(HEVC)标准)或对其的扩展(诸如多视图和/或可伸缩视频译码扩展))进行操作。替代地,视频编码器200和视频解码器300可以根据其它专有或行业标准(例如,联合探索模型(JEM)和/或ITU-T H.266(也称为通用视频译码(VVC)))进行操作。VVC标准的最新草案是在ITU-T SG 16 WP 3和ISO/IEC JTC 1/SC 29/WG 11的联合视频专家组(JVET)于2019年7月3-12日在瑞典哥德堡的第15次会议,Bross等人的“Versatile Video Coding(Draft 6)”,JVET-O2001-vE(以下简称“VVC草案6”)中描述的。然而,本公开内容的技术不限于任何具体译码标准。
通常,视频编码器200和视频解码器300可以执行对图片的基于块的译码。术语“块”通常指代包括要被处理的(例如,在编码和/或解码过程中要被编码、被解码或以其它方式使用的)数据的结构。例如,块可以包括亮度和/或色度数据的样本的二维矩阵。通常,视频编码器200和视频解码器300可以对以YUV(例如,Y、Cb、Cr)格式表示的视频数据进行译码。也就是说,并不是对用于图片的样本的红色、绿色和蓝色(RGB)数据进行译码,视频编码器200和视频解码器300可以对亮度和色度分量进行译码,其中,色度分量可以包括红色色相和蓝色色相色度分量两者。在一些示例中,视频编码器200在进行编码之前将所接收的经RGB格式化的数据转换为YUV表示,并且视频解码器300将YUV表示转换为RGB格式。可选地,预处理和后处理单元(未示出)可以执行这些转换。
概括而言,本公开内容可以涉及对图片的译码(例如,编码和解码)以包括对图片的数据进行编码或解码的过程。类似地,本公开内容可以涉及对图片的块的译码以包括对用于块的数据进行编码或解码(例如,预测和/或残差译码)的过程。经编码的视频比特流通常包括用于表示译码决策(例如,译码模式)以及将图片分割为块的语法元素的一系列值。因此,关于对图片或块进行译码的引用通常应当被理解为对用于形成图片或块的语法元素的值进行译码。
HEVC定义了各种块,包括译码单元(CU)、预测单元(PU)和变换单元(TU)。根据HEVC,视频译码器(诸如视频编码器200)根据四叉树结构来将译码树单元(CTU)分割为CU。也就是说,视频译码器将CTU和CU分割为四个相等的、不重叠的正方形,并且四叉树的每个节点具有零个或四个子节点。没有子节点的节点可以被称为“叶节点”,并且这种叶节点的CU可以包括一个或多个PU和/或一个或多个TU。视频译码器可以进一步分割PU和TU。例如,在HEVC中,残差四叉树(RQT)表示对TU的分区。在HEVC中,PU表示帧间预测数据,而TU表示残差数据。经帧内预测的CU包括帧内预测信息,比如帧内模式指示。
作为另一示例,视频编码器200和视频解码器300可以被配置为根据JEM或VVC进行操作。根据JEM或VVC,视频译码器(比如,视频编码器200)将图片分割为多个译码树单元(CTU)。视频编码器200可以根据树结构(比如,四叉树-二叉树(QTBT)结构或多类型树(MTT)结构)分割CTU。QTBT结构去除了多种分割类型的概念,比如在HEVC的CU、PU和TU之间的分隔。QTBT结构可以包括两个级别:根据四叉树分割而被分割的第一级别、以及根据二叉树分割而被分割的第二级别。QTBT结构的根节点对应于CTU。二叉树的叶节点对应于译码单元(CU)。
在MTT分割结构中,可以使用四叉树(QT)分割、二叉树(BT)分割以及一种或多种类型的三叉树(TT)(也被称为三元树(TT))分割来对块进行分割。三叉树或三元树分割是其中块被分为三个子块的分割。在一些示例中,三叉树或三元树分割将块划分为三个子块,而不通过中心划分原始块。MTT中的分割类型(例如,QT、BT和TT)可以是对称的或不对称的。
在一些示例中,视频编码器200和视频解码器300可以使用单个QTBT或MTT结构来表示亮度分量和色度分量中的每一者,而在其它示例中,视频编码器200和视频解码器300可以使用两个或更多个QTBT或MTT结构,诸如用于亮度分量的一个QTBT/MTT结构以及用于两个色度分量的另一个QTBT/MTT结构(或者用于相应色度分量的两个QTBT/MTT结构)。
视频编码器200和视频解码器300可以被配置为使用每HEVC的四叉树分割、QTBT分割、MTT分割、或其它分割结构。为了解释的目的,关于QTBT分割给出了本公开内容的技术的描述。然而,应当理解的是,本公开内容的技术还可以应用于被配置为使用四叉树分割或者还使用其它类型的分割的视频译码器。
可以以各种方式在图片中对块(例如,CTU或CU)进行分组。作为一个示例,砖块可以指代图片中的特定瓦片(tile)内的CTU行的矩形区域。瓦片可以是图片中的特定瓦片列和特定瓦片行内的CTU的矩形区域。瓦片列指代CTU的矩形区域,其具有等于图片的高度的高度以及由语法元素(例如,诸如在图片参数集中)指定的宽度。瓦片行指代CTU的矩形区域,其具有由语法元素指定的高度(例如,诸如在图片参数集中)以及与图片的宽度相等的宽度。
在一些示例中,可以将瓦片分割为多个砖块,每个砖块可以包括瓦片内的一个或多个CTU行。没有被分割为多个砖块的瓦片也可以被称为砖块。然而,作为瓦片的真实子集的砖块可以不被称为瓦片。
图片中的砖块也可以以切片来排列。切片可以是图片的整数个砖块,其可以唯一地被包含在单个网络抽象层(NAL)单元中。在一些示例中,切片包括多个完整的瓦片或者仅包括一个瓦片的完整砖块的连续序列。
本公开内容可以互换地使用“N×N”和“N乘N”来指代块(诸如CU或其它视频块)在垂直和水平维度方面的样本尺寸,例如,16×16样本或16乘16样本。通常,16×16CU将在垂直方向上具有16个样本(y=16),并且在水平方向上将具有16个样本(x=16)。同样地,N×NCU通常在垂直方向上具有N个样本,并且在水平方向上具有N个样本,其中N表示非负整数值。CU中的样本可以按行和列来排列。此外,CU不一定需要在水平方向上具有与在垂直方向上相同的数量的样本。例如,CU可以包括N×M样本,其中M不一定等于N。
视频编码器200对用于CU的表示预测和/或残差信息以及其它信息的视频数据进行编码。预测信息指示将如何预测CU以便形成用于CU的预测块。残差信息通常表示在编码之前的CU的样本与预测块之间的逐样本差。
为了预测CU,视频编码器200通常可以通过帧间预测或帧内预测来形成用于CU的预测块。帧间预测通常指代根据先前译码的图片的数据来预测CU,而帧内预测通常指代根据同一图片的先前译码的数据来预测CU。为了执行帧间预测,视频编码器200可以使用一个或多个运动矢量来生成预测块。视频编码器200通常可以执行运动搜索,以识别例如在CU与参考块之间的差异方面与CU紧密匹配的参考块。视频编码器200可以使用绝对差之和(SAD)、平方差之和(SSD)、平均绝对差(MAD)、均方差(MSD)、或其它这种差计算来计算差度量,以确定参考块是否与当前CU紧密匹配。在一些示例中,视频编码器200可以使用单向预测或双向预测来预测当前CU。
JEM和VVC的一些示例还提供仿射运动补偿模式,其可以被认为是帧间预测模式。在仿射运动补偿模式下,视频编码器200可以确定表示非平移运动(诸如放大或缩小、旋转、透视运动或其它不规则的运动类型)的两个或更多个运动矢量。
为了执行帧内预测,视频编码器200可以选择帧内预测模式来生成预测块。JEM和VVC的一些示例提供六十七种帧内预测模式,包括各种方向性模式、以及平面模式和DC模式。通常,视频编码器200选择帧内预测模式,帧内预测模式描述要根据其来预测当前块(例如,CU的块)的样本的、当前块的相邻样本。假定视频编码器200以光栅扫描顺序(从左到右、从上到下)对CTU和CU进行译码,则这样的样本通常可以是在与当前块相同的图片中在当前块的上方、左上方、或左侧。
视频编码器200对表示用于当前块的预测模式的数据进行编码。例如,对于帧间预测模式,视频编码器200可以对表示使用各种可用帧间预测模式中的哪一种的数据以及用于对应模式的运动信息进行编码。对于单向或双向帧间预测,例如,视频编码器200可以使用高级运动矢量预测(AMVP)或合并模式来对运动矢量进行编码。视频编码器200可以使用类似的模式来对用于仿射运动补偿模式的运动矢量进行编码。
在诸如对块的帧内预测或帧间预测之类的预测之后,视频编码器200可以计算用于该块的残差数据。残差数据(诸如残差块)表示在块与用于该块的预测块之间的逐样本差,该预测块是使用对应的预测模式来形成的。视频编码器200可以将一个或多个变换应用于残差块,以在变换域中而非在样本域中产生经变换的数据。例如,视频编码器200可以将离散余弦变换(DCT)、整数变换、小波变换或概念上类似的变换应用于残差视频数据。另外,视频编码器200可以在第一变换之后应用二次变换,诸如模式相关的不可分离二次变换(MDNSST)、信号相关变换、Karhunen-Loeve变换(KLT)等。视频编码器200在应用一个或多个变换之后产生变换系数。
如上所述,在任何变换以产生变换系数之后,视频编码器200可以执行对变换系数的量化。量化通常指代如下的过程:在该过程中,对变换系数进行量化以可能减少用于表示这些系数的数据量,从而提供进一步的压缩。通过执行量化过程,视频编码器200可以减小与一些或所有系数相关联的比特深度。例如,视频编码器200可以在量化期间将n比特的值向下舍入为m比特的值,其中n大于m。在一些示例中,为了执行量化,视频编码器200可以执行对要被量化的值的按位右移。
在量化之后,视频编码器200可以扫描变换系数,从而从包括经量化的变换系数的二维矩阵产生一维矢量。可以将扫描设计为将较高能量(并且因此较低频率)的系数放在矢量的前面,并且将较低能量(并且因此较高频率)的变换系数放在矢量的后面。在一些示例中,视频编码器200可以利用预定义的扫描顺序来扫描经量化的变换系数以产生经串行化的矢量,并且然后对矢量的经量化的变换系数进行熵编码。在其它示例中,视频编码器200可以执行自适应扫描。在扫描经量化的变换系数以形成一维矢量之后,视频编码器200可以例如根据上下文自适应二进制算术译码(CABAC)来对一维矢量进行熵编码。视频编码器200还可以对用于描述与经编码的视频数据相关联的元数据的语法元素的值进行熵编码,以供视频解码器300在对视频数据进行解码时使用。
为了执行CABAC,视频编码器200可以将上下文模型内的上下文分配给要被发送的符号。上下文可以涉及例如符号的相邻值是否为零值。概率确定可以是基于被分配给符号的上下文的。
视频编码器200还可以例如在图片报头、块报头、切片报头中为视频解码器300生成语法数据(诸如基于块的语法数据、基于图片的语法数据和基于序列的语法数据)、或其它语法数据(诸如序列参数集(SPS)、图片参数集(PPS)或视频参数集(VPS))。同样地,视频解码器300可以对这样的语法数据进行解码以确定如何解码对应的视频数据。
以这种方式,视频编码器200可以生成比特流,其包括经编码的视频数据,例如,描述将图片分割为块(例如,CU)以及用于该块的预测和/或残差信息的语法元素。最终,视频解码器300可以接收比特流并且对经编码的视频数据进行解码。
通常,视频解码器300执行与由视频编码器200执行的过程相反的过程,以对比特流的经编码的视频数据进行解码。例如,视频解码器300可以使用CABAC,以与视频编码器200的CABAC编码过程基本上类似的、但是相反的方式来对用于比特流的语法元素的值进行解码。语法元素可以定义用于将图片分割为CTU、以及根据对应的分割结构(比如,QTBT结构)对每个CTU进行分割以定义CTU的CU的分割信息。语法元素还可以定义用于视频数据的块(例如,CU)的预测和残差信息。
残差信息可以由例如经量化的变换系数来表示。视频解码器300可以对块的经量化的变换系数进行逆量化和逆变换以重现用于该块的残差块。视频解码器300使用经信号通知的预测模式(帧内预测或帧间预测)和相关的预测信息(例如,用于帧间预测的运动信息)来形成用于该块的预测块。视频解码器300然后可以对预测块和残差块(在逐个样本的基础上)进行组合以重现原始块。视频解码器300可以执行额外处理,诸如执行去块过程以减少沿着块的边界的视觉伪影。
视频编码器200和视频解码器300可以执行本公开内容的技术,以增强解码器侧运动矢量细化(DMVR)。尽管被称为“解码器侧”,但是应当理解,视频编码器200也可以执行这些技术,以确保由视频编码器200和视频解码器300两者所生成的对应的预测块是一致的。视频编码器200和视频解码器300可以单独地或以任何组合执行以下讨论的任何或所有技术。
图10A和图10B是示出用于减少与使用经细化的运动矢量来执行BIO相关联的存储器带宽的示例技术的概念图。视频编码器200和视频解码器300可以被配置为使用该技术来允许BIO将经填充的滤波器输入样本(即,从参考图片中提取并用于运动补偿的样本)用作计算梯度值并执行最终运动补偿的源。
由于对存储器带宽的约束,可以从参考图片获取的最大像素数是(w+7)*(h+7),其中,w和h表示CU的宽度和高度。利用能够从解码器侧运动矢量细化(DMVR)和/或模板匹配预测(TMP)推导出的预定义最大位移矢量d,所获取的采样区域应当与(w+7+2d)*(h+7+2d)一样大,其中,位于(w+7)*(h+7)区域之外的附加样本是从附近样本进行填充的,并且d≥0。
图10B示出了在(w+7)*(h+7)区域与填充样本之间的几何关系。当BIO应用于经细化的MV时(例如,图10A和图10B中的ΔMV),它仍然需要位于填充区域之外的额外像素来计算梯度值。相应地,视频编码器200和视频解码器300可以将填充尺寸从d个像素扩大到d+s个像素,其中,s是梯度滤波器的长度的一半(例如,s=1、2、3、……,分别针对3、5、7,……-抽头的梯度过滤器)。应用用于形成(w+7+2d)*(h+7+2d)相同填充方法。初始滤波器输入样本加填充区域的形成尺寸变为(w+7+2d+2s)*(h+7+2d+2s)。
图11是示出跨译码树单元(CTU)的虚拟流水线数据单元(VPDU)的示例处理顺序的概念图。视频编码器200和视频解码器300可以约束在何处能够将用于运动矢量预测的参考用于合并模式和/或AMVP模式。由于预取回问题(如上所述),并非来自当前帧中的解码CU的每个细化MV都可用于后续块来执行空间运动预测。基本上,当且仅当经细化的运动矢量是来自左上CTU或上方CTU中的块时,才能使用空间因果邻域中的经细化的MV。以下两种技术中的一种或两种可以单独使用,也可以彼此组合使用,和/或与本文所述的其他技术组合使用。
在一个示例中,来自右上方CTU的经细化的MV也可以用作空间运动预测的参考。在另一个示例中,可以将提前产生的至少N个VPDU(具有尺寸为64×64的虚拟流水线数据单元,N>1)的经细化的MV用作空间运动预测的参考。如图11中所示,当CTU尺寸为128×128时,流水线数据单元将一个CTU划分成4个相等尺寸的、不重叠的方块,以便适于变换单元的最大尺寸,而不管基础CU分割是什么。因此,空间紧邻的VPDU中的一些经细化的MV可能变得可用。例如,给定N=2,D0/A1/D1可以从A0/B0/A1得到经细化的MV,而C1可以从B0和D0得到参考。
在一些示例中,对HMVP列表的更新过程可以有额外的约束,如下所述。当仿射标志关闭时(即,平移运动模型),在当前帧中的解码CU的经细化的MV无法被推入HMVP列表中。而是,可以使用两种替代方法来更新HMVP列表。在一些示例中,解码CU的初始MV被推入HMVP列表中。在其它示例中,没有推入任何对象来更新HMVP列表。
在一些示例中,当仿射标志打开时(即,仿射运动模型),在当前帧中的解码CU的经细化的CPMV(控制点运动矢量)无法被推入仿射HMVP列表。相反,视频编码器200和视频解码器300可以通过将该解码CU的初始CPMV推入到仿射HMVP列表中来更新仿射HMVP列表。可选地,在一些示例中,没有推入任何对象来更新仿射HMVP列表。
另一示例技术包括对构建的仿射合并候选(也称为构造模式)的约束,以避免有条件地从因果相邻子块中将经细化的MV作为CPMV来形成仿射合并候选。在该示例技术中,在当前CU的空间因果邻域中采样的每个子块MV应用以下规则来确定其初始子块MV或其经细化的替代是否能够用于构建模式。(注意,此处的MV可以是平移运动,仿射CPMV和仿射推导的子块MV。)在一些示例中,如果采样的子块位于上方的CTU行,则它们的经细化的MV(如果它们存在的话)可以用于构建模式。补充地或替代地,如果采样子块位于当前CTU中或位于当前块左侧的其它CTU中,则只有其初始MV(如果它们存在的话)能够用于构建模式。
另外,对于低复杂度的代码设计,在构建模式的过程中,在当前CTU行中的具有经细化的信息的子块始终被标记为不可用,而位于当前CTU正上方的CTU行中的那些子块被标记为不可用。此外,视频编码器200和视频解码器300可以保留额外的灵活性来确定(例如,以序列级别来预定义或配置)来自右上方CTU的经细化的MV在构建模式的过程中是否应当被标记为可用。
在一些示例中,视频编码器200和视频解码器300可以使用广义双向预测(GBi)和加权双向预测(WP)对应用于双向预测的权重值进行归一化。根据权重值的幅度,每个预测样本对双向预测的最终预测信号的贡献可能不均等。但是,DMVR始终假设L0和L1预测信号对最终双向预测信号有同等的贡献,因此目标函数被定义为找到delta MV,以便将L0和L1预测块之间的差异进行最小化。由于当不相等的权重值用于双向预测时可能无法满足此假设,因此该示例技术包括对由GBi和WP使用的权重值进行归一化。假设w
Cost function=w
或者
Cost function=w
其中,n是预测块中的像素的局部像素坐标。
为了防止这些方程式进行非整数运算,可以将正整数标量(表示为s)应用于w0和w1。
Cost function=(w
或者
Cost function=(w
s的值可以是1、2、4、8和其他2的幂的整数。例如,s的建议配置可以是:针对GBi,s=8;针对亮度WP,s=2
在各种示例中,当在比特流中存在MMVR或合并偏移扩展(Merge OffsetExtension)的语法时,可以对DMVR施加约束以限制其使用。下面显示了五个示例,独立约束:
·DMVR始终应用于具有双向预测运动的块,无论它是通过MMVR、合并偏移扩展、还是常规合并模式生成的。
·DMVR应用于从以下衍生出的双向预测运动:1)常规合并模式,以及2)MMVR或合并偏移扩展,其中,位移矢量指向以初始运动指向位置为中心的[±d,±d]区域之外,d≥0。
·DMVR应用于从以下衍生出的双向预测运动:1)常规合并模式,以及2)MMVR或合并偏移扩展,其中,位移矢量指向以初始运动指向位置为中心的[±d,±d]区域内,d≥0。
·DMVR仅在其未由MMVR和合并偏移扩展生成时,才应用于经细化的双向预测运动。
·DMVR不应用于具有MMVR和合并偏移扩展的语法的合并候选。例如,视频标准可以将MMVR语法应用于合并列表中的某些运动候选。
在本公开内容中,不向它们应用DMVR。
图12是示出其中仅水平填充用于水平插值的技术的概念图。在一些示例中,视频编码器200和视频解码器300可以执行指定的顺序过程,以减少DMVR中的填充处理(上述)的计算复杂度和存储空间。在上面的示例中,两个额外的像素填充到(w+7)*(h+7)像素的每一侧。结果缓存在包含(w+11)*(h+11)像素的存储块中。然后,DMVR需要执行运动补偿以形成搜索区域样本。基本上,首先应用水平插值,并且需要尺寸为(w+11-t)*(w+11)的中间缓存器来缓存插值结果,其中,t是插值滤波器抽头的数量减去1。例如,当插值滤波器是8抽头时,t=7。
在一些示例中,填充过程变为两步过程。首先,取代对(w+7)*(h+7)像素的每一侧执行填充,视频编码器200和视频解码器300可以仅水平地执行填充处理。因此,在执行水平插值之前,仅需要缓存(w+11)*(h+7)个像素。然后,视频编码器200和视频解码器300可以执行水平插值并且缓存所得到的像素以适合尺寸为(w+11-t)*(h+7)的存储块。此后,视频编码器200和视频解码器300可以对存储块的顶部和底部执行垂直填充,以形成与通过初始填充过程而生成的上述(w+11-t)*(w+11)像素相同的像素。
通过两步填充过程,用于保持水平插值输入的缓存器尺寸从(w+11)*(h+11)有效地减小到(w+11)*(h+7)。因此,可以减少从水平插值引入的计算复杂度。
在一些示例中,视频编码器200和视频解码器300可以执行以下三种示例技术中的一种或多种技术,以将参数子像素MV推导的概念扩展为具有四舍五入偏移和可选采样位置的更准确的MV表示。
在一些示例中,视频编码器200和视频解码器300可以执行四舍五入偏移。也就是说,视频编码器200和视频解码器300可以将四舍五入偏移量添加到参数误差曲面函数的方案中,如下所示:
Δx=floor((2α(E
Δy=floor((2α(E
其中,β是能够以序列、图片、瓦片或切片级别而确定的四舍五入偏移。β的值可以是0、±e、±2e、±3e、4e-1或-4e+1,其中,e=E
另外,在一些示例中,视频编码器200和视频解码器300还可以使用简化设计,其中,四舍五入偏移量直接设置为常数值,而不以信号发送,例如,β=2(E
在一些示例中,视频编码器200和视频解码器300可以执行稀疏采样表示。取代从具有1像素间隔的十字形的端点采样成本值,视频编码器200和视频解码器300可以应用将参数子像素MV推导的概念扩展到N像素间隔的技术。
Δx=floor((Nα(E
Δy=floor((Nα(E
其中,N可以是1、2、3、4,......,8,并且以序列、图片、瓦片或切片级别来指示。
另外,本公开内容还提出了具有常数值的简化设计,即,N=2。
这些技术也与如上所述的四舍五入偏移一起操作。当存在四舍五入偏移时,(Δx,Δy)可以表示为:
Δx=floor((2Nα(E
Δy=floor((2Nα(E
其中,β是可以以序列、图片、瓦片或切片级别而确定的四舍五入偏移。β的值可以是0、±e、±2e、±3e、4e-1或-4e+1,其中,e=E
在一些示例中,视频编码器200和视频解码器300可以执行可选的采样模式。在一些示例中,用于参数子像素MV推导的采样位置不必来自沿x轴和y轴的十字形图案的端点。在这样的示例中,视频编码器200和视频解码器300可以将坐标系统逆时针旋转45度,从而得到参数解的新闭式解(Δx,Δy),如下所示:
dx=floor((α(E
dy=floor((α(E
以及
(Δx,Δy)=(dx,dy)+(dy,-dx)。
此外,这些技术还可以与以上讨论的四舍五入偏移和/或以上讨论的稀疏采样一起操作。
·四舍五入偏移:
dx=floor((2α(E
dy=floor((2α(E
·稀疏采样:
dx=floor((Nα(E
dy=floor((Nα(E
·组合:
dx=floor((2Nα(E
dy=floor((2Nα(E
在一些示例中,视频编码器200和视频解码器300可以对DMVR的最小块尺寸采用约束,以防止DMVR过度增加帧间预测的最坏情况的存储器带宽。在这样的示例中,当预测块满足以下条件中的任一个时,视频编码器200和视频解码器300不执行DMVR。
·块尺寸为N×4或4×N,其中,N是正整数(例如,4、8、16、32、64、128、256、……)。
·块尺寸与8×8相同。
在一些示例中,视频编码器200和视频解码器300可以避免对以下尺寸的块执行DMVR:
·块尺寸是N×4或4×N,其中,N<64(例如,4、8、16、32)。
·当DMVR的搜索点未完全覆盖在[-1,1]x[-1,1]范围内时,块尺寸是N×4或4×N,其中,N≥64(例如,64、128)。
·块尺寸是与8×8相同。
通过这种方式,视频编码器200和视频解码器300可以避免对具有宽度或高度中的至少一项小于8个像素,或尺寸等于8×8个像素的块执行DMVR。视频编码器200和视频解码器300可以对尺寸大于8×8(即,至少8×N或N×8,其中,N是大于8的整数)的块执行DMVR。可以针对这样的块默认启用DMVR,或者视频编码器200视频解码器300可以被配置有要评估的附加标准,以便确定是否对这些块执行DMVR。
概括而言,本公开内容可能涉及“以信号发送”某些信息(比如,语法元素)。术语“以信号发送”通常可以指代对用于语法元素的值和/或用于对经编码的视频数据进行解码的其它数据的传送。也就是说,视频编码器200可以在比特流中以信号发送用于语法元素的值。通常,以信号发送指代在比特流中生成值。如上所述,源设备102可以基本上实时地或不是实时地(比如,可能在将语法元素存储到存储设备112以供目的地设备116稍后取回时发生)将比特流传输到目的地设备116。
图13A和图13B是示出示例四叉树二叉树(QTBT)结构130以及对应的译码树单元(CTU)132的概念图。实线表示四叉树拆分,而虚线指示二叉树拆分。在二叉树的每个拆分(即非叶)节点中,用信号通知一个标志以指示使用哪种拆分类型(即,水平或垂直),其中,在该示例中,0指示水平拆分,而1指示垂直拆分。对于四叉树拆分,由于四叉树节点将块水平地并且垂直地拆分为具有相等尺寸的4个子块,因此无需指示拆分类型。因此,视频编码器200可以对以下各项进行编码,而视频解码器300可以对以下各项进行解码:用于QTBT结构130的区域树级别(即实线)的语法元素(诸如拆分信息)、以及用于QTBT结构130的预测树级别(即虚线)的语法元素(诸如拆分信息)。视频编码器200可以对用于由QTBT结构130的终端叶节点表示的CU的视频数据(诸如预测和变换数据)进行编码,而视频解码器300可以对视频数据进行解码。
通常,图13B的CTU 132可以与定义与QTBT结构130的处于第一和第二级别的节点相对应的块的尺寸的参数相关联。这些参数可以包括CTU尺寸(表示样本中的CTU 132的尺寸)、最小四叉树尺寸(MinQTSize,其表示最小允许四叉树叶节点尺寸)、最大二叉树尺寸(MaxBTSize,其表示最大允许二叉树根节点尺寸)、最大二叉树深度(MaxBTDepth,其表示最大允许二叉树深度)、以及最小二叉树尺寸(MinBTSize,其表示最小允许二叉树叶节点尺寸)。
QTBT结构的与CTU相对应的根节点可以在QTBT结构的第一级别处具有四个子节点,每个子节点可以是根据四叉树分割来分割的。也就是说,第一级别的节点是叶节点(没有子节点)或者具有四个子节点。QTBT结构130的示例将这样的节点表示为包括具有实线分支的父节点和子节点。如果第一级别的节点不大于最大允许二叉树根节点尺寸(MaxBTSize),则可以通过相应的二叉树进一步对这些节点进行分割。可以对一个节点的二叉树拆分进行迭代,直到从拆分产生的节点达到最小允许二叉树叶节点尺寸(MinBTSize)或最大允许二叉树深度(MaxBTDepth)。QTBT结构130的示例将这样的节点表示为具有虚线分支。二叉树叶节点被称为译码单元(CU),其用于预测(例如,图片内或图片间预测)和变换,而不进行任何进一步分割。如上所讨论的,CU也可以被称为“视频块”或“块”。
在QTBT分割结构的一个示例中,CTU尺寸被设置为128×128(亮度样本和两个对应的64×64色度样本),MinQTSize被设置为16×16,MaxBTSize被设置为64×64,MinBTSize(对于宽度和高度两者)被设置为4,并且MaxBTDepth被设置为4。首先对CTU应用四叉树分割以生成四叉树叶节点。四叉树叶节点可以具有从16×16(即MinQTSize)到128×128(即CTU尺寸)的尺寸。如果叶四叉树节点为128×128,则由于该尺寸超过MaxBTSize(即,在该示例中为64×64),因此叶四叉树节点将不被二叉树进一步拆分。否则,叶四叉树节点将被二叉树进一步分割。因此,四叉树叶节点也是用于二叉树的根节点,并且具有为0的二叉树深度。当二叉树深度达到MaxBTDepth(在该示例中为4)时,不允许进一步拆分。当二叉树节点具有等于MinBTSize(在该示例中为4)的宽度时,其意味着不允许进一步的水平拆分。类似地,具有等于MinBTSize的高度的二叉树节点意味着不允许针对该二叉树节点进行进一步的垂直拆分。如上所述,二叉树的叶节点被称为CU,并且根据预测和变换而被进一步处理,而无需进一步分割。
图14是示出可以执行本公开内容的技术的示例视频编码器200的框图。图14是出于解释的目的而提供的,并且不应当被认为对在本公开内容中泛泛地举例说明和描述的技术进行限制。出于解释的目的,本公开内容在视频译码标准(诸如HEVC视频译码标准和处于开发中的H.266视频译码标准)的背景下描述了视频编码器200。然而,本公开内容的技术不限于这些视频译码标准,并且一般地适用于视频编码和解码。
在图14的示例中,视频编码器200包括视频数据存储器230、模式选择单元202、残差生成单元204、变换处理单元206、量化单元208、逆量化单元210、逆变换处理单元212、重构单元214、滤波器单元216、解码图片缓存器(DPB)218和熵编码单元220。视频数据存储器230、模式选择单元202、残差生成单元204、变换处理单元206、量化单元208、逆量化单元210、逆变换处理单元212、重构单元214、滤波器单元216、DPB218和熵编码单元220中的任何一者或全部可以在一个或多个处理器中或者在处理电路中实现。例如,视频编码器200的单元可以被实现为一个或多个电路或逻辑元件,作为硬件电路的一部分,或者作为处理器、ASIC或FPGA的一部分。此外,视频编码器200可以包括额外或替代的处理器或处理电路以执行这些和其它功能。
视频数据存储器230可以存储要由视频编码器200的组件来编码的视频数据。视频编码器200可以从例如视频源104(图9)接收被存储在视频数据存储器230中的视频数据。DPB 218可以充当参考图片存储器,其存储参考视频数据以在由视频编码器200对后续视频数据进行预测时使用。视频数据存储器230和DPB 218可以由各种存储器设备中的任何一种形成,诸如动态随机存取存储器(DRAM)(包括同步DRAM(SDRAM))、磁阻RAM(MRAM)、电阻性RAM(RRAM)、或其它类型的存储器设备。视频数据存储器230和DPB 218可以由相同的存储器设备或单独的存储器设备来提供。在各个示例中,视频数据存储器230可以与视频编码器200的其它组件在芯片上(如图所示),或者相对于那些组件在芯片外。
在本公开内容中,对视频数据存储器230的引用不应当被解释为限于在视频编码器200内部的存储器(除非如此具体地描述),或者不限于在视频编码器200外部的存储器(除非如此具体地描述)。确切而言,对视频数据存储器230的引用应当被理解为存储视频编码器200接收以用于编码的视频数据(例如,用于要被编码的当前块的视频数据)的参考存储器。图9的存储器106还可以提供对来自视频编码器200的各个单元的输出的临时存储。
示出了图14的各个单元以帮助理解由视频编码器200执行的操作。这些单元可以被实现为固定功能电路、可编程电路、或其组合。固定功能电路指代提供特定功能并且关于可以执行的操作而预先设置的电路。可编程电路指代可以被编程以执行各种任务并且以可以执行的操作来提供灵活功能的电路。例如,可编程电路可以执行软件或固件,软件或固件使得可编程电路以软件或固件的指令所定义的方式进行操作。固定功能电路可以执行软件指令(例如,以接收参数或输出参数),但是固定功能电路执行的操作类型通常是不可变的。在一些示例中,这些单元中的一个或多个单元可以是不同的电路块(固定功能或可编程),并且在一些示例中,一个或多个单元可以是集成电路。
视频编码器200可以包括由可编程电路形成的算术逻辑单元(ALU)、基本功能单元(EFU)、数字电路、模拟电路和/或可编程核。在其中使用由可编程电路执行的软件来执行视频编码器200的操作的示例中,存储器106(图9)可以存储视频编码器200接收并且执行的软件的目标代码,或者视频编码器200内的另一存储器(未示出)可以存储这样的指令。
视频数据存储器230被配置为存储所接收的视频数据。视频编码器200可以从视频数据存储器230取回视频数据的图片,并且将视频数据提供给残差生成单元204和模式选择单元202。视频数据存储器230中的视频数据可以是要被编码的原始视频数据。
模式选择单元202包括运动估计单元222、运动补偿单元224和帧内预测单元226。模式选择单元202可以包括额外功能单元,其根据其它预测模式来执行视频预测。作为示例,模式选择单元202可以包括调色板单元、块内复制单元(其可以是运动估计单元222和/或运动补偿单元224的一部分)、仿射单元、线性模型(LM)单元等。
模式选择单元202通常协调多个编码通路(pass),以测试编码参数的组合以及针对这样的组合所得到的率失真值。编码参数可以包括将CTU分割为CU、用于CU的预测模式、用于CU的残差数据的变换类型、用于CU的残差数据的量化参数等。模式选择单元202可以最终选择编码参数的具有比其它测试的组合更佳的率失真值的组合。
视频编码器200可以将从视频数据存储器230取回的图片分割为一系列CTU,并且将一个或多个CTU封装在切片内。模式选择单元202可以根据树结构(诸如上述HEVC的QTBT结构或四叉树结构)来分割图片的CTU。如上所述,视频编码器200可以通过根据树结构来分割CTU,从而形成一个或多个CU。这样的CU通常也可以被称为“视频块”或“块”。
通常,模式选择单元202还控制其组件(例如,运动估计单元222、运动补偿单元224和帧内预测单元226)以生成用于当前块(例如,当前CU,或者在HEVC中为PU和TU的重叠部分)的预测块。为了对当前块进行帧间预测,运动估计单元222可以执行运动搜索以识别在一个或多个参考图片(例如,被存储在DPB 218中的一个或多个先前译码的图片)中的一个或多个紧密匹配的参考块。具体地,运动估计单元222可以例如根据绝对差之和(SAD)、平方差之和(SSD)、平均绝对差(MAD)、均方差(MSD)等,来计算表示潜在参考块将与当前块的类似程度的值。运动估计单元222通常可以使用在当前块与所考虑的参考块之间的逐样本差来执行这些计算。运动估计单元222可以识别从这些计算所得到的具有最低值的参考块,其指示与当前块最紧密匹配的参考块。
运动估计单元222可以形成一个或多个运动矢量(MV),所述运动矢量限定相对于当前块在当前图片中的位置而言参考块在参考图片中的的位置。然后,运动估计单元222可以将运动矢量提供给运动补偿单元224。例如,对于单向帧间预测,运动估计单元222可以提供单个运动矢量,而对于双向帧间预测,运动估计单元222可以提供两个运动矢量。然后,运动补偿单元224可以使用运动矢量来生成预测块。例如,运动补偿单元224可以使用运动矢量来取回参考块的数据。作为另一示例,如果运动矢量具有分数样本精度,则运动补偿单元224可以根据一个或多个插值滤波器来对用于预测块的值进行插值。此外,对于双向帧间预测,运动补偿单元224可以取回用于由相应的运动矢量标识的两个参考块的数据并且例如通过逐样本平均或加权平均来将所取回的数据进行组合。
根据本公开内容的技术,当针对视频数据的当前块启用DMVR时,运动补偿单元224可以执行DMVR来细化运动矢量。例如,如果当前块具有的尺寸小于或等于8×8,即,宽度或高度小于8个像素,或者尺寸恰好等于8×8像素,则运动补偿单元224可以避免对运动矢量执行DMVR,并且使用运动矢量来生成预测块。否则,如果块具有大于8×8的尺寸(例如,至少8×N或N×8的尺寸,其中,N是大于8的整数),则运动补偿单元224可以使用其他准则来确定是否对运动矢量执行DMVR。当启用DMVR时,运动补偿单元224可以执行如上面所讨论的DMVR,并且然后使用经细化的运动矢量来产生预测块。
作为另一示例,对于帧内预测或帧内预测译码,帧内预测单元226可以根据与当前块相邻的样本来生成预测块。例如,对于方向性模式,帧内预测单元226通常可以在数学上将相邻样本的值进行组合,并且跨当前块在所定义的方向上填充这些计算出的值以产生预测块。作为另一示例,对于DC模式,帧内预测单元226可以计算当前块的相邻样本的平均值,并且生成预测块以包括针对预测块的每个样本的该得到的平均值。
模式选择单元202将预测块提供给残差生成单元204。残差生成单元204从视频数据存储器230接收当前块的原始的未经译码的版本,并且从模式选择单元202接收预测块。残差生成单元204计算当前块与预测块之间的逐样本差。所得到的逐样本差定义了用于当前块的残差块。在一些示例中,残差生成单元204可以残差块中的样本值之间的差,以使用残差差分脉冲译码调制(RDPCM)来生成残差块。在一些示例中,可以使用执行二进制减法的一个或多个减法器电路来形成残差生成单元204。
在其中模式选择单元202将CU分割为PU的示例中,每个PU可以与亮度预测单元和对应的色度预测单元相关联。视频编码器200和视频解码器300可以支持具有各种尺寸的PU。如上所指出的,CU的尺寸可以指代CU的亮度译码块的尺寸,而PU的尺寸可以指代PU的亮度预测单元的尺寸。假定特定CU的尺寸为2N×2N,则视频编码器200可以支持用于帧内预测的2N×2N或N×N的PU尺寸、以及用于帧间预测的2N×2N、2N×N、N×2N、N×N或类似的对称的PU尺寸。视频编码器200和视频解码器300还可以支持针对用于帧间预测的2N×nU、2N×nD、nL×2N和nR×2N的PU尺寸的非对称分割。
在其中模式选择单元202不将CU进一步分割为PU的示例中,每个CU可以与亮度译码块和对应的色度译码块相关联。如上所述,CU的尺寸可以指代CU的亮度译码块的尺寸。视频编码器200和视频解码器300可以支持2N×2N、2N×N或N×2N的CU尺寸。
对于其它视频译码技术(举几个示例,诸如块内复制模式译码、仿射模式译码和线性模型(LM)模式译码),模式选择单元202经由与译码技术相关联的相应单元来生成用于正被编码的当前块的预测块。在一些示例中(诸如调色板模式译码),模式选择单元202可以不生成预测块,而是替代地生成指示基于所选择的调色板来重构块的方式的语法元素。在这样的模式下,模式选择单元202可以将这些语法元素提供给熵编码单元220以进行编码。
如上所述,残差生成单元204接收用于当前块和对应的预测块的视频数据。然后,残差生成单元204为当前块生成残差块。为了生成残差块,残差生成单元204计算预测块与当前块之间的逐样本差。
变换处理单元206将一种或多种变换应用于残差块,以生成变换系数的块(本文中被称为“变换系数块”)。变换处理单元206可以将各种变换应用于残差块,以形成变换系数块。例如,变换处理单元206可以将离散余弦变换(DCT)、方向变换、Karhunen-Loeve变换(KLT)、或概念上类似的变换应用于残差块。在一些示例中,变换处理单元206可以对残差块执行多种变换,例如,初级变换和二次变换(诸如旋转变换)。在一些示例中,变换处理单元206不对残差块应用变换。
量化单元208可以对变换系数块中的变换系数进行量化,以产生经量化的变换系数块。量化单元208可以根据与当前块相关联的QP值来对变换系数块的变换系数进行量化。视频编码器200(例如,经由模式选择单元202)可以通过调整与CU相关联的QP值来调整被应用于与当前块相关联的系数块的量化程度。量化可能引起信息损失,并且因此,经量化的变换系数可能具有与变换处理单元206所产生的原始变换系数相比较低的精度。
逆量化单元210和逆变换处理单元212可以将逆量化和逆变换分别应用于经量化的变换系数块,以从变换系数块重构残差块。重构单元214可以基于经重构的残差块和由模式选择单元202生成的预测块来产生与当前块相对应的重构块(尽管潜在地具有某种程度的失真)。例如,重构单元214可以将经重构的残差块的样本与来自模式选择单元202所生成的预测块的对应样本相加,以产生经重构的块。
滤波器单元216可以对经重构的块执行一个或多个滤波器操作。例如,滤波器单元216可以执行去块操作以减少沿着CU的边缘的块效应伪影。在一些示例中,可以跳过滤波器单元216的操作。
视频编码器200将经重构的块存储在DPB 218中。例如,在其中不需要滤波器单元216的操作的示例中,重构单元214可以将经重构的块存储到DPB 218中。在其中需要滤波器单元216的操作的示例中,滤波器单元216可以将经滤波的重构块存储到DPB 218中。运动估计单元222和运动补偿单元224可以从DPB 218取回由经重构的(并且潜在地经滤波的)块形成的参考图片,以对后续编码的图片的块进行帧间预测。另外,帧内预测单元226可以使用在DPB 218中的当前图片的经重构的块来对当前图片中的其它块进行帧内预测。
通常,熵编码单元220可以对从视频编码器200的其它功能组件接收的语法元素进行熵编码。例如,熵编码单元220可以对来自量化单元208的经量化的变换系数块进行熵编码。作为另一示例,熵编码单元220可以对来自模式选择单元202的预测语法元素(例如,用于帧间预测的运动信息或用于帧内预测的帧内模式信息)进行熵编码。熵编码单元220可以对作为视频数据的另一示例的语法元素执行一个或多个熵编码操作,以生成经熵编码的数据。例如,熵编码单元220可以执行上下文自适应变长译码(CAVLC)操作、CABAC操作、可变-可变(V2V)长度译码操作、基于语法的上下文自适应二进制算术译码(SBAC)操作、概率区间分割熵(PIPE)译码操作、指数哥伦布编码操作、或对数据的另一种类型的熵编码操作。在一些示例中,熵编码单元220可以在其中语法元素未被熵编码的旁路模式下操作。
视频编码器200可以输出比特流,其包括用于重构切片或图片的块所需要的经熵编码的语法元素。具体地,熵编码单元220可以输出比特流。
关于块描述了上述操作。这样的描述应当被理解为用于亮度译码块和/或色度译码块的操作。如上所述,在一些示例中,亮度译码块和色度译码块是CU的亮度分量和色度分量。在一些示例中,亮度译码块和色度译码块是PU的亮度分量和色度分量。
在一些示例中,不需要针对色度译码块重复关于亮度编码块执行的操作。作为一个示例,不需要重复用于识别用于亮度译码块的运动矢量(MV)和参考图片的操作来识别用于色度块的MV和参考图片。确切而言,可以对用于亮度译码块的MV进行缩放以确定用于色度块的MV,并且参考图片可以是相同的。作为另一示例,对于亮度译码块和色度译码块,帧内预测过程可以是相同的。
以这种方式,视频编码器200表示用于对视频数据进行译码(在该示例中是编码和解码)的设备的示例,所述设备包括被配置为存储视频数据的存储器;以及在电路中实现并被配置为以下操作的一个或多个处理器:确定视频数据的块具有以下各项中的至少一项:宽度小于8个像素、高度小于8个像素、或者宽度和高度等于8个像素;响应于确定视频数据的块具有以下各项中的至少一项:宽度小于8个像素、高度小于8个像素、或者宽度和高度等于8个像素,确定不使用解码器侧运动矢量细化(DMVR)对所述块进行译码;以及响应于确定不使用DMVR对所述块进行译码,在不对所述块执行DMVR的情况下对所述块进行译码。
图15是示出可以执行本公开内容的技术的示例视频解码器300的框图。图15是出于解释的目的而提供的,并且不对在本公开内容中泛泛地举例说明和描述的技术进行限制。出于解释的目的,本公开内容根据JEM和HEVC的技术描述了视频解码器300。然而,本公开内容的技术可以由被配置用于其它视频译码标准的视频译码设备来执行。
在图15的示例中,视频解码器300包括经译码图片缓存器(CPB)存储器320、熵解码单元302、预测处理单元304、逆量化单元306、逆变换处理单元308、重构单元310、滤波器单元312和经解码图片缓存器(DPB)314。CPB存储器320、熵解码单元302、预测处理单元304、逆量化单元306、逆变换处理单元308、重构单元310、滤波器单元312和DPB 134中的任何一者或全部可以在一个或多个处理器中或者在处理电路中实现。此外,视频解码器300可以包括额外或替代的处理器或处理电路以执行这些和其它功能。
预测处理单元304包括运动补偿单元316和帧内预测单元318。预测处理单元304可以包括根据其它预测模式来执行预测的附加单元。作为示例,预测处理单元304可以包括调色板单元、块内复制单元(其可以形成运动补偿单元316的一部分)、仿射单元、线性模型(LM)单元等。在其它示例中,视频解码器300可以包括更多、更少或不同的功能组件。
CPB存储器320可以存储要由视频解码器300的组件解码的视频数据,诸如经编码的视频比特流。例如,可以从计算机可读介质110(图9)获得被存储在CPB存储器320中的视频数据。CPB存储器320可以包括存储来自经编码的视频比特流的经编码的视频数据(例如,语法元素)的CPB。此外,CPB存储器320可以存储除了经译码的图片的语法元素之外的视频数据,诸如表示来自视频解码器300的各个单元的输出的临时数据。DPB314通常存储经解码的图片,视频解码器300可以输出经解码的图片,和/或在解码经编码的视频比特流的后续数据或图片时使用经解码的图片作为参考视频数据。CPB存储器320和DPB 314可以由各种存储器设备中的任何一种形成,诸如动态随机存取存储器(DRAM),包括同步DRAM(SDRAM)、磁阻RAM(MRAM)、电阻式RAM(RRAM)、或其它类型的存储器设备。CPB存储器320和DPB 314可以由相同的存储器设备或单独的存储器设备来提供。在各个示例中,CPB存储器320可以与视频解码器300的其它组件在芯片上,或者相对于那些组件在芯片外。
补充地或替代地,在一些示例中,视频解码器300可以从存储器120(图9)取回经译码的视频数据。也就是说,存储器120可以如上文所讨论地利用CPB存储器320来存储数据。同样,当视频解码器300的一些或全部功能是用要被视频解码器300的处理电路执行的软件来实现时,存储器120可以存储要被视频解码器300执行的指令。
示出了图15中示出的各个单元以帮助理解由视频解码器300执行的操作。这些单元可以被实现为固定功能电路、可编程电路、或其组合。类似于图14,固定功能电路指代提供特定功能并且关于可以执行的操作而预先设置的电路。可编程电路指代可以被编程以执行各种任务并且以可以执行的操作来提供灵活功能的电路。例如,可编程电路可以执行软件或固件,软件或固件使得可编程电路以软件或固件的指令所定义的方式进行操作。固定功能电路可以执行软件指令(例如,以接收参数或输出参数),但是固定功能电路执行的操作的类型通常是不可变的。在一些示例中,这些单元中的一个或多个单元可以是不同的电路块(固定功能或可编程),并且在一些示例中,一个或多个单元可以是集成电路。
视频解码器300可以包括由可编程电路形成的ALU、EFU、数字电路、模拟电路和/或可编程核。在其中由在可编程电路上执行的软件执行视频解码器300的操作的示例中,片上或片外存储器可以存储视频解码器300接收并且执行的软件的指令(例如,目标代码)。
熵解码单元302可以从CPB接收经编码的视频数据,并且对视频数据进行熵解码以重现语法元素。预测处理单元304、逆量化单元306、逆变换处理单元308、重构单元310和滤波器单元312可以基于从比特流中提取的语法元素来生成经解码的视频数据。
通常,视频解码器300逐块地重构图片。视频解码器300可以单独地对每个块执行重构操作(其中,当前正在被重构(即,被解码)的块可以被称为“当前块”)。
熵解码单元302可以对定义经量化的变换系数块的经量化的变换系数的语法元素以及诸如量化参数(QP)和/或变换模式指示之类的变换信息进行熵解码。逆量化单元306可以使用与经量化的变换系数块相关联的QP来确定量化程度,并且同样地,确定供逆量化单元306应用的逆量化程度。逆量化单元306可以例如执行按位左移操作以对经量化的变换系数进行逆量化。逆量化单元306从而可以形成包括变换系数的变换系数块。
在逆量化单元306形成变换系数块之后,逆变换处理单元308可以将一种或多种逆变换应用于变换系数块,以生成与当前块相关联的残差块。例如,逆变换处理单元308可以将逆DCT、逆整数变换、逆Karhunen-Loeve变换(KLT)、逆旋转变换、逆方向变换或另一逆变换应用于系数块。
此外,预测处理单元304根据由熵解码单元302进行熵解码的预测信息语法元素来生成预测块。例如,如果预测信息语法元素指示当前块是经帧间预测的,则运动补偿单元316可以生成预测块。在这种情况下,预测信息语法元素可以指示在DPB 314中的要从其取回参考块的参考图片、以及标识相对于当前块在当前图片中的位置而言参考块在参考图片中的位置的运动矢量。运动补偿单元316通常可以以与关于运动补偿单元224(图14)所描述的方式基本类似的方式来执行帧间预测过程。
根据本公开内容的技术,当针对视频数据的当前块启用DMVR时,运动补偿单元316可以执行DMVR以细化运动矢量。例如,如果当前块的尺寸小于或等于8×8,即,宽度或高度小于8个像素,或者尺寸恰好等于8×8像素,则运动补偿单元316可以避免对运动矢量执行DMVR,并且使用运动矢量来生成预测块。否则,如果块具有大于8×8的尺寸(例如,至少8×N或N×8的尺寸,其中,N是大于8的整数),则运动补偿单元316可以使用其他规则来确定是否对运动矢量执行DMVR。当启用DMVR时,运动补偿单元316可以执行如上面所讨论的DMVR,并且然后使用经细化的运动矢量来生成预测块。
作为另一示例,如果预测信息语法元素指示当前块是经帧内预测的,则帧内预测单元318可以根据由预测信息语法元素指示的帧内预测模式来生成预测块。再次,帧内预测单元318通常可以以与关于帧内预测单元226(图3)所描述的方式基本上类似的方式来执行帧内预测过程。帧内预测单元318可以从DPB 314取回当前块的相邻样本的数据。
重构单元310可以使用预测块和残差块来重构当前块。例如,重构单元310可以将残差块的样本与预测块的对应样本相加来重构当前块。
滤波器单元312可以对经重构的块执行一个或多个滤波器操作。例如,滤波器单元312可以执行去块操作以减少沿着经重构的块的边缘的块效应伪影。不一定在所有示例中都执行滤波器单元312的操作。
视频解码器300可以将重构块存储在DPB 314中。例如,在不执行滤波器单元312的操作的示例中,重构单元310可以将重构块存储至DPB314。在执行滤波器单元312的操作的示例中,滤波器单元312可以将经滤波的重构块存储到DPB314。如上所讨论的,DPB 314可以将参考信息(诸如用于帧内预测的当前图片以及用于后续运动补偿的先前解码的图片的样本)提供给预测处理单元304。此外,视频解码器300可以从DPB输出经解码的图片,以用于在诸如图1的显示设备118之类的显示设备上的后续呈现。
以这种方式,视频解码器300表示用于对视频数据进行译码(在该示例中为解码)的设备的示例,该设备包括被配置为存储视频数据的存储器;以及在电路中实现并被配置为以下操作的一个或多个处理器:确定视频数据块具有以下各项中的至少一项:宽度小于8个像素、高度小于8个像素、或者宽度和高度等于8个像素;响应于确定视频数据的块具有以下各项中的至少一项:宽度小于8个像素、高度小于8个像素、或者宽度和高度等于8个像素,则确定不使用解码器侧运动矢量细化(DMVR)对所述块进行译码;以及,响应于确定不使用DMVR对所述块进行译码,在不对所述块执行DMVR的情况下对所述块进行译码。
图16是示出根据本公开内容的技术的对当前块进行编码的示例方法的流程图。当前块可以包括当前CU。尽管关于视频编码器200(图9和图14)进行了描述,但是应当理解的是,其它设备可以被配置为执行与图16类似的方法。
在该示例中,视频编码器200最初预测当前块(350)。例如,视频编码器200可以形成针对当前块的预测块。当形成预测块时,视频编码器200可以执行与本公开内容的DMVR有关的任何或所有技术。在一些示例中,视频编码器200可以使用解码器侧运动矢量细化(DMVR)来细化从运动搜索中确定的运动矢量,如上文所讨论的。具体来说,根据本公开内容的技术,视频编码器200可以至少部分地基于当前块的尺寸来确定是否要执行DMVR。如果当前块具有宽度或高度中的至少一项小于8个像素,或者具有宽度和高度两者都等于8个像素(即,尺寸为8×8像素),则视频编码器200可以确定不对当前块执行DMVR。否则,如果当前块具有至少8×N或N×8的尺寸,其中,N是大于8的整数,则视频编码器200可以基于附加标准,来确定执行DMVR或确定是否对当前块执行DMVR。然后,视频编码器200可以使用潜在地利用DMVR进行细化的运动矢量来形成预测块。
然后,视频编码器200可以计算用于当前块的残差块(352)。为了计算残差块,视频编码器200可以计算原始的未经译码的块与用于当前块的预测块之间的差。然后,视频编码器200可以对残差块的系数进行变换和量化(354)。接下来,视频编码器200可以扫描残差块的经量化的变换系数(356)。在扫描期间或在扫描之后,视频编码器200可以对系数进行熵编码(358)。例如,视频编码器200可以使用CAVLC或CABAC来对系数进行编码。然后,视频编码器200可以输出用于块的系数的经熵译码的数据(360)。
通过这种方式,图16表示对视频数据块进行译码(即,编码)的方法的示例,所述方法包括:确定视频数据的块具有以下各项中的至少一项:宽度小于8个像素、高度小于8个像素、或者宽度和宽度等于8个像素;响应于确定视频数据的块具有以下各项中的至少一项:宽度小于8个像素、高度小于8个像素、或者宽度和高度等于8个像素,确定不使用解码器侧运动矢量细化(DMVR)对所述块进行译码;以及,响应于确定不使用DMVR对所述块进行译码,在不对所述块执行DMVR的情况下对所述块进行译码。
图17是示出根据本公开内容的技术的对当前块进行解码的示例方法的流程图。当前块可以包括当前CU。尽管关于视频解码器300(图9和图15)进行了描述,但是应当理解,其它设备可以被配置为执行与图17类似的方法。
视频解码器300可以接收用于当前块的经熵译码的数据(例如,经熵译码的预测信息和用于与当前块相对应的残差块的系数的经熵译码的数据)(370)。视频解码器300可以对经熵译码的数据进行熵解码以确定用于当前块的预测信息并且重现残差块的系数(372)。视频解码器300可以(例如使用如由针对当前块的预测信息所指示的帧间预测模式)预测当前块(374),以计算针对当前块的预测块。
当形成预测块时,视频解码器300可以执行与本公开内容的DMVR有关的任何或所有技术。在一些示例中,视频解码器300可以对使用解码器侧运动矢量细化(DMVR)而确定的经解码的运动矢量进行细化,如上文所讨论的。具体来说,根据本公开内容的技术,视频解码器300可以至少部分地基于当前块的尺寸来确定是否执行DMVR。如果当前块具有宽度或高度中的至少一个小于8个像素,或者具有宽度和高度两者等于8个像素(即,尺寸为8×8像素),则视频解码器300可以确定不对当前块执行DMVR。否则,如果当前块具有至少8×N或N×8的尺寸,其中N是大于8的整数,则视频解码器300可以基于其他标准来确定执行DMVR或确定是否对当前块执行DMVR。然后,视频解码器300可以使用潜在地利用DMVR进行细化的运动矢量来形成预测块。
然后,视频解码器300可以对所重现的系数进行逆扫描(376),以创建经量化的变换系数的块。然后,视频解码器300可以对系数进行逆量化和逆变换以产生残差块(378)。最终,视频解码器300可以通过将预测块和残差块进行组合来对当前块进行解码(380)。
以这种方式,图17表示对视频数据块进行译码(叫做解码)的方法的示例,该方法包括:确定视频数据的块具有以下各项中的至少一项:宽度小于8个像素、高度小于8个像素、或者宽度和高度等于8个像素;响应于确定视频数据的块具有以下各项中的至少一项:宽度小于8个像素、高度小于8个像素、或者宽度和高度等于8个像素,确定不使用解码器侧运动矢量细化(DMVR)对所述块进行译码;以及,响应于确定不使用DMVR对所述块进行译码,在不对所述块执行DMVR的情况下对所述块进行译码。
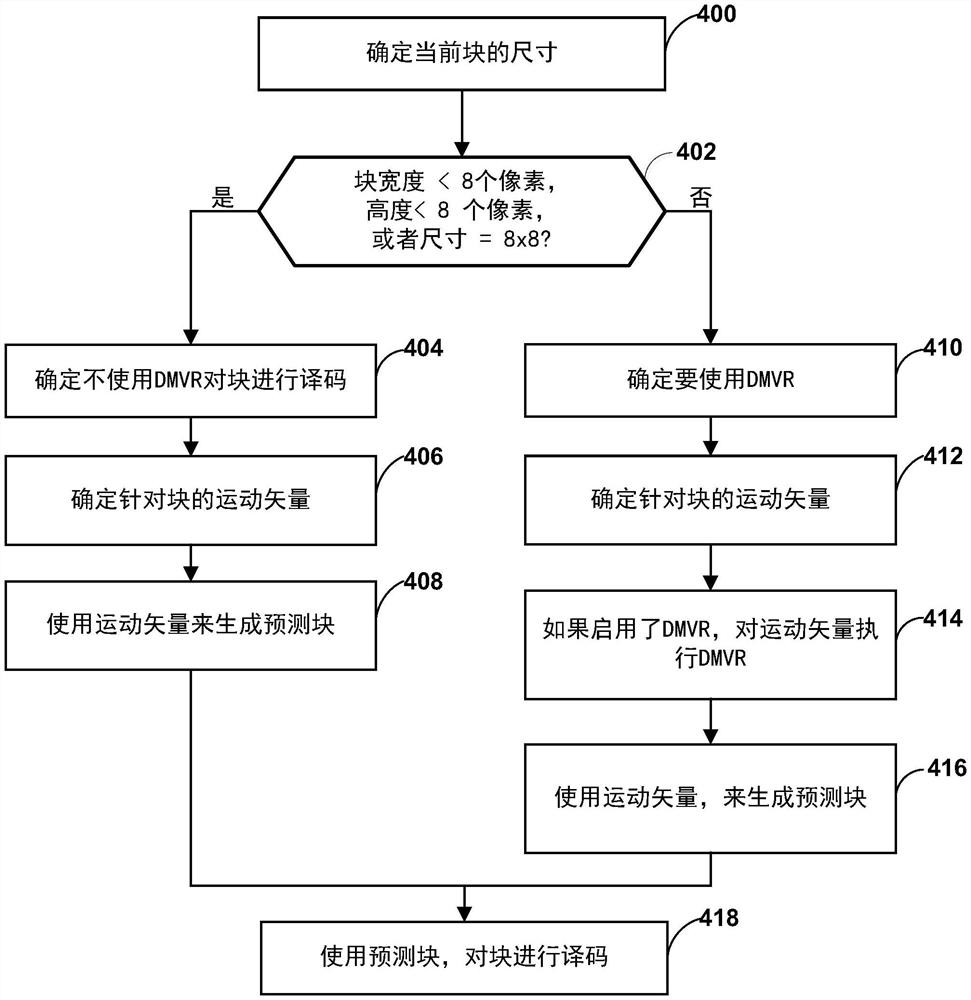
图18是示出根据本公开内容的技术的对视频数据的块进行译码的方法的示例的流程图。图18的方法可以由诸如视频编码器200或视频解码器300之类的视频译码设备来执行。为了举例的目的,参照视频解码器300描述了图18的方法,尽管诸如视频编码器200之类的其他视频译码设备可以执行该方法或类似方法。
起初,视频解码器300确定块的尺寸(400)。例如,视频解码器300可以解码与译码树单元(CTU)相关联的树结构以确定树结构中的分裂,最终识别树结构的叶节点。使用分裂的数量、树类型和分裂类型,视频解码器300可以确定块的尺寸,例如,以像素为单位的块的宽度和高度。当由视频编码器200执行时,视频编码器200可以通过测试CTU的各种不同块尺寸和分割图案来确定引起最佳性能速率失真值的CTU的分割,从而确定块的尺寸。
然后,视频解码器300可以确定块的宽度中的任何一个小于8个像素,块的高度小于8个像素,或者块的尺寸等于8×8(482)。如果这些中的任何一个为真(402的“是”分支),则视频解码器300可以确定未使用DMVR对块进行编码(404)。因此,视频解码器300可例如通过解码块来继续确定块的运动矢量(406),然后使用运动矢量为块产生预测块(408)。
另一方面,如果块具有至少8×8的尺寸并且宽度或高度中的至少一项大于8个像素(即,至少8×N或N×8的尺寸,其中,N是大于8的整数)(402的“否”分支),则视频解码器300可以例如基于尺寸的确定和/或使用附加标准来确定对所述块执行DMVR(410)。在一些示例中,其他标准可以指示将不执行DMVR。视频解码器300可以确定针对块的运动矢量(412),如果其它标准指示启用了DMVR,则对运动矢量执行DMVR(414),以及使用(潜在地经细化的)运动矢量来生成预测块(416)。
在任一情况下(即,在步骤408或416之后),视频解码器300随后可以使用预测块对所述块进行译码(即,在该示例中为解码)(418)。
以这种方式,图18表示对视频数据的块进行译码(编码或解码)的方法的示例,所述方法包括:确定视频数据的块具有以下各项中的至少一项:宽度小于8个像素、高度小于8个像素、或者宽度和高度等于8个像素;响应于确定视频数据的块具有以下各项中的至少一项:宽度小于8个像素、高度小于8个像素、或者宽度和高度等于8个像素,确定不使用解码器侧运动矢量细化(DMVR)对所述块进行译码;以及,响应于确定不使用DMVR对所述块进行译码,在不对所述块执行DMVR的情况下对所述块进行译码。
要认识到的是,根据示例,本文描述的任何技术的某些动作或事件可以以不同的顺序执行,可以被添加、合并或完全省略(例如,并非所有描述的动作或事件是对于实施所述技术都是必要的)。此外,在某些示例中,动作或事件可以例如通过多线程处理、中断处理或多个处理器并发地而不是顺序地执行。
在一个或多个示例中,所描述的功能可以用硬件、软件、固件或其任何组合来实现。如果用软件来实现,则所述功能可以作为一个或多个指令或代码存储在计算机可读介质上或者通过其进行传输并且由基于硬件的处理单元执行。计算机可读介质可以包括计算机可读存储介质,其对应于诸如数据存储介质之类的有形介质或者通信介质,所述通信介质包括例如根据通信协议来促进计算机程序从一个地方传送到另一个地方的任何介质。以这种方式,计算机可读介质通常可以对应于(1)非暂时性的有形计算机可读存储介质、或者(2)诸如信号或载波之类的通信介质。数据存储介质可以是可以由一个或多个计算机或者一个或多个处理器访问以取得用于实现在本公开内容中描述的技术的指令、代码和/或数据结构的任何可用的介质。计算机程序产品可以包括计算机可读介质。
举例来说而非进行限制,这样的计算机可读存储介质可以包括RAM、ROM、EEPROM、CD-ROM或其它光盘存储、磁盘存储或其它磁存储设备、闪存、或者能够用于以指令或数据结构形式存储期望的程序代码以及能够由计算机访问的任何其它介质。此外,任何连接被适当地称为计算机可读介质。例如,如果使用同轴电缆、光纤光缆、双绞线、数字用户线(DSL)或者无线技术(例如,红外线、无线电和微波)从网站、服务器或其它远程源传输指令,则同轴电缆、光纤光缆、双绞线、DSL或者无线技术(例如,红外线、无线电和微波)被包括在介质的定义中。然而,应当理解的是,计算机可读存储介质和数据存储介质不包括连接、载波、信号或其它临时性介质,而是替代地针对非临时性的有形存储介质。如本文所使用的,磁盘和光盘包括压缩光盘(CD)、激光光盘、光盘、数字多功能光盘(DVD)、软盘和蓝光光盘,其中,磁盘通常磁性地复制数据,而光盘利用激光来光学地复制数据。上述各项的组合也应当被包括在计算机可读介质的范围之内。
指令可以由一个或多个处理器来执行,诸如一个或多个数字信号处理器(DSP)、通用微处理器、专用集成电路(ASIC)、现场可编程门阵列(FPGA)、或其它等效的集成或分立逻辑电路。因此,如本文所使用的术语“处理器”和“处理电路”可以指代前述结构中的任何一者或者适于实现本文描述的技术的任何其它结构。另外,在一些方面中,本文描述的功能可以在被配置用于编码和解码的专用硬件和/或软件模块内提供,或者被并入经组合的编解码器中。此外,所述技术可以完全在一个或多个电路或逻辑元件中实现。
本公开内容的技术可以在多种多样的设备或装置中实现,包括无线手机、集成电路(IC)或一组IC(例如,芯片组)。在本公开内容中描述了各种组件、模块或单元以强调被配置为执行所公开的技术的设备的功能性方面,但是不一定需要通过不同的硬件单元来实现。确切而言,如上所述,各种单元可以被组合在编解码器硬件单元中,或者由可互操作的硬件单元的集合(包括如上所述的一个或多个处理器)结合适当的软件和/或固件来提供。
已经描述了各个示例。这些和其它示例在所附的权利要求的范围内。
- 解码器侧运动矢量细化的运动矢量管理
- 选择性地应用双向光流和解码器侧运动矢量细化来进行视频编解码的方法和设备