一种全自动可视水泥清库装置
文献发布时间:2023-06-19 11:40:48
技术领域
本发明涉及水泥清库破碎技术领域,具体涉及一种用于水泥清库的全自动可视水泥清库破碎装置。
背景技术
水泥必须经过一定龄期的物理检验,合格后方能出厂,因此水泥厂必须设置一定容量的水泥库。在生产过程中,粉磨时随混合材料带入的水份会使水泥预先水化导致水泥库内水泥结块,一定时间后会有大量物料滞留库内导致出料困难,且由于水泥库是储存水泥的圆筒状构筑物,其尺寸非常大,内部环境恶劣,这就决定了清库工作具有危险性,且需在粉尘污染较大的环境中进行,若使用人工下库里去清理既易发生坍塌掩埋事故且效率不高,所以采用清库装置进行清库是很有必要的。一般的清库装置都是采用人工辅助且只针对出料仓以上的部位进行清洗,而以下的部位使用人工进库清理,实际上危险性依然非常大,清除的水泥会在下部大量堆积,且在清库操作中因人的走动或工具与物料的接触很容易造成物料的二次扬尘,从而使库内环境更差。专利CN 210456001U中所公开的一种水泥库清库装置,使用了三根钢丝绳吊起整个装置,这种结构很难实现在圆周方向整个平面以及出料仓以下的清洗,且清洗过程所产生的振动会导致装置难以得到控制;专利CN209647150 U公开的一种多角度自动水泥清库机缺少稳定支撑装置,而且转位电机布置在钢丝绳下很难实现有效转位;专利CN 110615192 A公布的一种水泥清库装置没有控制系统和相应的传感器无法实现清库过程中的有效控制,清洗装置的两个臂要进行清库作业,因此无法起到有效的支撑作用,且整个装置不便于吊装操作。因此发明一种全自动高效的水泥清库装置是很有必要的。
发明内容
本发明的目的在于:为了解决现有水泥库采用人工清库存在的粉尘伤害人员健康,劳动量大且不全面的问题,本发明提供一种全自动水泥库清库装置。
本发明的技术解决方案为:一种全自动可视水泥清库装置,主要由吊装机构、支撑机构、下降旋转机构、清洗机构和控制系统组成;其特征在于:吊装机构包括:卷扬机、卷扬机支座、吊装钢丝绳;支撑机构包括:安装底座、上部展开装置、上部支撑装置、支撑臂倾角传感器,上部支撑装置包括三根支撑伸缩臂,每根支撑伸缩臂由移动缸驱动三截伸缩臂、弹簧减震支座;下降旋转机构包括:竖向移动缸、下安装底座、下部展开装置、旋转支撑装置、旋转臂倾角传感器,旋转支撑装置包括三根旋转支撑伸缩臂,每根旋转支撑伸缩臂由移动缸驱动三截伸缩臂、导向行走轮;清洗机构在旋转支撑装置末端,每套清洗机构包括:切削刀盘、驱动电机、框架、框架倾角传感器、框架缸、摄像头,卷扬机通过螺栓安装在卷扬机支座的安装面上,缠绕在卷扬机上的吊装钢丝绳末端连接吊环螺钉,吊环螺钉通过螺纹安装到安装底座上,上部支撑装置与安装底座通过轴销连接,上移动缸通过法兰固定安装在伸缩臂的基本臂的末端,基本臂的翼板与齿轮端面焊接,齿轮与提升缸带动的提升件啮合,支撑伸缩臂末端的安装面与弹簧减震支座通过螺钉固定,支撑臂倾角传感器的安装面通过螺钉固定在支撑伸缩臂基本臂的上安装面上,上部展开装置的提升缸上的法兰盘通过螺钉固定在安装底座的内部空腔顶部,使其与安装底座同轴心放置,竖向移动缸采用螺钉与安装底座和下安装底座固定,下部展开装置上的法兰盘同样通过螺钉竖向同轴心固定在下安装底座下端的内部空腔中,旋转臂倾角传感器使用螺钉固定在旋转伸缩臂基本臂的上安装面上,在三个旋转支撑伸缩臂的末端各通过螺栓连接与导向行走轮的轮架上下两个安装板固定,一组导向行走轮安装两个可以单独控制旋转的滚轮,每个滚轮由电动机驱动,切削刀盘由切削电动机驱动,切削电动机通过法兰安装在框架上,框架缸两端的翼板与旋转支撑伸缩臂第三节伸缩臂下的翼板、框架的侧翼板使用销轴连接,框架的上翼板与旋转支撑伸缩臂第三节伸缩臂末端使用销轴连接,形成一个三角形结构,框架倾角传感器的安装面使用螺钉平行安装在框架的外安装面上,摄像头使用螺钉固定在导向行走轮的轮架的下安装板上;所述的支撑伸缩臂和旋转支撑伸缩臂使用铝合金材料,且为薄壁结构,采用插销式伸缩结构,竖向移动缸、上移动缸和下移动缸选用伺服电动缸,可以避免液压油泄露污染,便于接入PLC控制系统;提升件是外表面带有齿的圆柱体结构,齿轮和提升件材料选用20CrMnTi,表面进行渗氮处理,提高承载能力,提升缸为电动缸带动提升件进行上下运动,提升件通过与齿轮的啮合进而可以驱动三个伸缩臂同时展开和收回;导向行走轮采用圆锥滚子轴承,滚轮采用麦克纳姆轮,可以实现横向和纵向移动,轮毂和滚动小轮选用航空铝合金材料,滚动小轮上装有橡胶套;导向行走轮的电动机选用伺服电机,电机驱动电路采用TB6612FNG芯片,它具有大电流MOSFET-H桥结构,双通道电路输出,可同时驱动2个电动机。内置过热保护和低压检测电路,无需外加散热片;摄像头使用红外摄像头,红外灯辐射“照明”,红外低照度彩色摄像机感受周围环境反射回来的红外光实现夜视成像,可对黑暗环境下的水泥库进行实时观察;支撑臂倾角传感器、框架倾角传感器、旋转臂倾角传感器采集到支撑伸缩臂、框架和旋转支撑伸缩臂的倾角信号,经PLC控制系统处理,通过联系上部展开装置、下部展开装置的电动缸可以控制上部支撑装置和旋转支撑装置的展开角度,以及调节为电动缸的框架缸伸缩,始终使框架保持竖直方向;切削电动机选用永磁同步电动机,切削刀盘的材料采用硬质合金钢,为上表面和圆柱面带切削刀刃的圆盘状刀具;弹簧减震支座的弹簧选用矩形截面螺旋压缩弹簧。
上述方案的原理是:卷扬机钢丝绳的一端与和安装底座螺纹连接的吊环螺钉连接,启动卷扬机将装置吊装到水泥库内,待吊装到待清理位置后,卷扬机停止工作并自锁起保护作用;下部的工作机构是本发明的主体,各支撑装置伸缩臂的根部和底座都是通过轴销进行铰接的,并在其根部焊接的齿轮可以与上部展开装置的提升件啮合,即齿轮齿条啮合结构,吊装稳定之后,提升缸推出提升件带动三个支撑伸缩臂同时展开,待展开到水平位置时支撑臂倾角传感器传递角度信号,PLC控制系统读取信号,发出命令使提升缸关停并锁定,支撑伸缩臂内部的上移动缸通过逐段插销推出的方式带动支撑伸缩臂伸长到指定水泥库半径长度,与库壁压紧,将整个清库装置固定住,其末端螺栓固定安装的弹簧减震支座能够减弱在工作时振动带给装置的不利影响,然后,旋转支撑装置的旋转支撑伸缩臂同理展开成水平,启动切削电动机带动切削刀盘转动,切削刀盘结构为圆盘上分布的有切削刀刃,切削刀盘高速旋转可以将水泥块切削打碎,然后旋转支撑伸缩臂内部的下移动缸驱动伸缩臂伸长到指定水泥库半径长度,待清洗完毕后,导向行走轮在库壁上沿圆周方向行走带动旋转支撑伸缩臂旋转使切削刀盘做圆弧清洗,由于为三根臂结构,只需旋转120°即可清洗整个平面,待该平面圆周清洗完毕之后,竖向移动缸伸长一个切削刀盘直径的长度,进入下一切削位置,导向行走轮的滚轮为麦克纳姆轮可以实现横向和纵向移动,此时三组导向性走轮起导向支撑作用,完成该平面的切削工作,循环往复以上工作过程,直到出料仓高度时,PLC控制系统命令结束上述工作方式,转入出料仓以下的工作方式;清洗出料仓以下位置时PLC控制系统获取旋转臂倾角传感器传递的旋转支撑伸缩臂的倾角信号,控制下部展开装置将旋转支撑伸缩臂向下收缩,旋转支撑伸缩臂伸长,使刀盘下降一个直径的高度并贴合到库壁上进行清洗,框架倾角传感器、旋转臂倾角传感器与框架缸形成的负反馈结构,控制系统调整框架缸始终使框架保持竖直方向,切削刀盘可以进行有效清洗,导向行走轮在库壁上沿圆周方向转动120°带动旋转支撑伸缩臂旋转使切削刀盘做整个圆周的清洗操作,然后控制下部展开装置将旋转支撑伸缩臂向下收缩,旋转支撑伸缩臂伸长,使刀盘下降一个直径的高度进入下一清洗位置,并贴合到库壁上进行清洗切削,重复操作知道整库清理完毕;旋转支撑伸缩臂的末端安装的红外摄像头采用红外灯辐射“照明”,红外低照度彩色摄像机感受周围环境反射回来的红外光进而成像,可以在水泥库内黑暗且充满大量扬尘的环境里看到切削刀盘清洗的实时状况,并可通过控制系统及时调整。
本发明与现有类似系统的优点是:可以折叠方便吊装;全自动工作,无需人工进库清洗,安全环保;多个支撑臂固定,结构稳定,工作可靠,且能实现360°清洗;单电缸插销式的伸缩结构,可以适用于在长度范围内任意半径的水泥库;导向行走轮可以实现前行、横移、斜行、旋转及其组合等运动方式;安装有摄像头,能够实现可视化操作;可以准确调整旋转伸缩臂角度,并对出料仓以下清洗。
附图说明
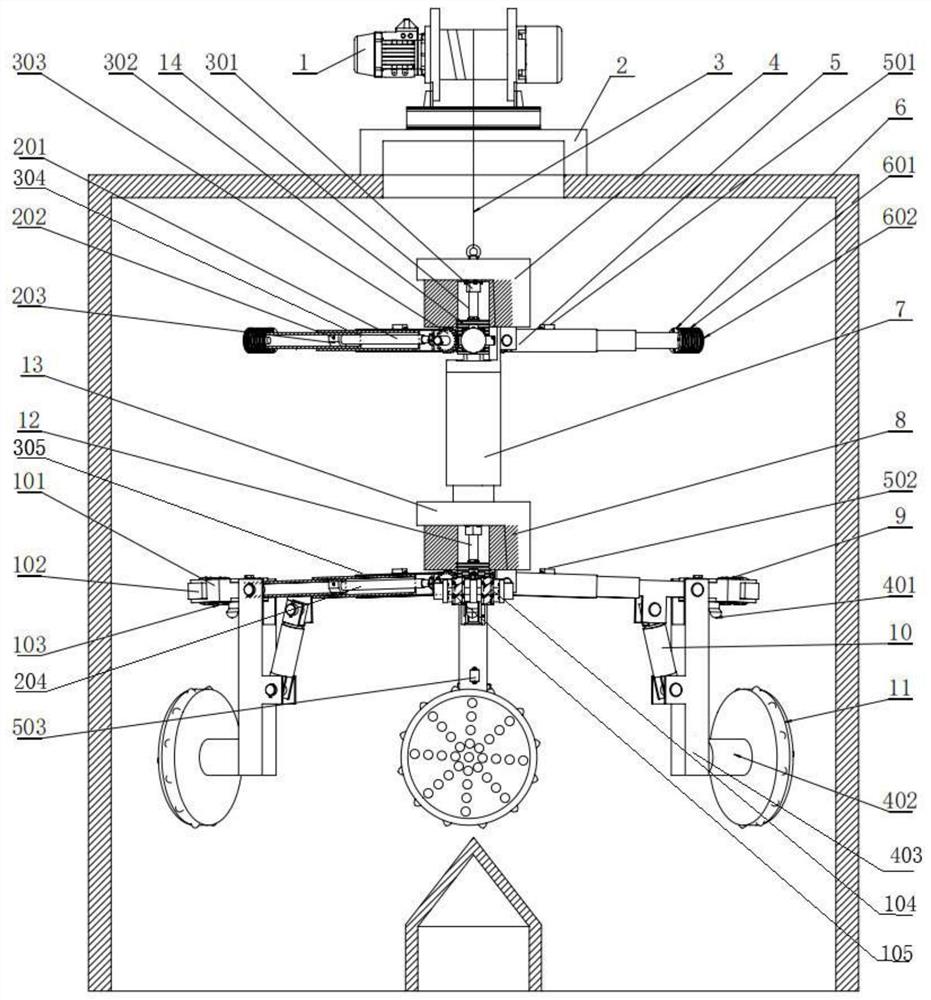
图1为本发明技术解决方案的一种全自动可视水泥清库装置在出料仓以上工作时的剖视图
图2为本发明技术解决方案的一种全自动可视水泥清库装置在出料仓以下工作时的水泥库内部视图
图3为本发明技术解决方案的上部支撑装置5的结构剖视图
图4为本发明技术解决方案的旋转支撑装置13和清洗机构的结构图
图5为本发明技术解决方案的导向行走轮9的轴向结构图
具体实施方式
为了更好的理解此发明,下面就附图说明对一种全自动可视水泥清库装置作进一步的详细阐述。
如图1所示,主要由吊装机构、支撑机构、下降旋转机构、清洗机构和控制系统组成;吊装机构包括:卷扬机1、卷扬机支座2、吊装钢丝绳3;支撑机构包括:安装底座4、上部展开装置14、上部支撑装置5、支撑臂倾角传感器501,上部支撑装置5包括三根支撑伸缩臂304,每根支撑伸缩臂304由上移动缸201驱动三截伸缩臂、弹簧减震支座6;下降旋转机构包括:竖向移动缸7、下安装底座8、下部展开装置12、旋转支撑装置13、旋转臂倾角传感器502,旋转支撑装置13包括三根旋转支撑伸缩臂305,每根旋转支撑伸缩臂305由下移动缸204驱动三截伸缩臂、导向行走轮9;清洗机构在旋转支撑装置13末端,每套清洗机构包括:切削刀盘11、切削电动机402、框架403、框架倾角传感器503、框架缸10、摄像头401,卷扬机1的钢丝绳3与安装底座4螺纹连接的吊环螺钉连接,启动卷扬机1将装置吊装到水泥库内,待吊装到待清理位置后,卷扬机1停止工作并自锁起保护作用;下部的工作机构是本发明的主体,各支撑装置伸缩臂的根部和底座都是通过轴销进行铰接的,并在其根部焊接的齿轮303可以与上部展开装置5的提升件302啮合,即齿轮齿条啮合结构,提升缸301推出带动三个支撑伸缩臂304展开,待展开到水平位置时支撑臂倾角传感器501反馈信号停止展开,内部的上移动缸201通过逐段插销推出的方式带动支撑伸缩臂304伸长到指定水泥库半径长度,与库壁压紧,将整个清库装置固定住,其末端螺栓固定安装的弹簧减震支座6能够减弱在工作时振动带给装置的不利影响,然后,旋转支撑装置的旋转支撑伸缩臂305同理展开成水平,启动切削电动机402带动切削刀盘11转动,切削刀盘11结构为圆盘上分布的有切削刀刃,切削刀盘高速旋转可以将水泥块切削打碎,然后旋转支撑伸缩臂305内部的下移动缸204驱动伸缩臂伸长到指定水泥库半径长度,待清洗完毕后,导向行走轮9在水平方向行走带动旋转支撑伸缩臂305旋转使切削刀盘11做圆弧清洗,由于为三根臂结构,只需旋转120°即可清洗整个平面,待该平面圆周清洗完毕之后,竖向移动缸7伸长一个单位长度,导向行走轮9此时起导向支撑作用,调整旋转支撑伸缩臂305的高度,进行下一平面的清洗,循环往复,直到出料仓高度时。
如图2所示,清洗出料仓以下位置时,上部支撑装置(5)完成在水泥库的支撑动作,由控制系统发出下部展开装置12所需要的角度,机构PLC控制系统控制下部展开装置12将旋转支撑伸缩臂305向下转动一定的角度,旋转臂倾角传感器502的角度信号传递给机构PLC控制系统,达到预定的角度停止,同时控制系统读取框架倾角传感器503的角度信号值,调整框架缸10,始终使框架403保持竖直方向,切削刀盘11可以进行有效清洗。
如图3所示,上部支撑装置5与安装底座4通过轴销连接,上移动缸201通过法兰固定安装在伸缩臂的基本臂的末端,伸缩臂基本臂翼板上焊接的齿轮303与由提升缸301带动的提升件302啮合,支撑伸缩臂304顶部的安装面与弹簧减震支座6通过螺钉固定,支撑臂倾角传感器501的安装面通过螺钉平行地固定在支撑伸缩臂304基本臂的上安装面上,上部展开装置14的提升缸301上的法兰盘通过螺钉固定在安装底座4的内部空腔顶部,使其与安装底座4同轴心放置。
如图4所示,下部展开装置12上的法兰盘通过螺钉竖向同轴心固定在下安装底座8下端的内部空腔中,旋转臂倾角传感器502使用螺钉固定在旋转支撑伸缩臂305基本臂的上安装面上,在三个旋转支撑伸缩臂305的末端各通过螺栓连接与导向行走轮9的轮架101上下两个安装板固定,切削刀盘11由切削电动机402驱动,切削电动机402通过法兰安装在框架403上,框架缸10两端的翼板与旋转支撑伸缩臂305第三节伸缩臂下的翼板、框架403的侧翼板使用销轴连接,框架403的上翼板与旋转支撑伸缩臂305第三节伸缩臂末端使用销轴连接,形成一个三角形结构,框架倾角传感器503的安装面使用螺钉平行安装在框架403的外安装面上,摄像头401使用螺钉固定在导向行走轮9的轮架101的下安装板上。
如图5所示,为导向行走轮9的结构,一组导向行走轮9包括两个单独控制旋转的滚轮103,滚轮103为麦克纳姆轮,每个滚轮103由电动机102驱动,使用圆锥滚子轴承,电动机102的端部法兰与轮架101通过螺钉连接固定。
综上所述,本发明的一种全自动可视水泥清库装置为水泥清库领域提供了一种适用性强、自动化程度高、效率高、性能优异、安全可靠且能够在黑暗大量扬尘的环境里可视化操作、绿色环保的水泥清库装置。
以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
- 一种全自动可视水泥清库装置
- 一种水泥清库装置及水泥清库系统