一种基于螺线二维扫描合成孔径雷达三维成像装置及方法
文献发布时间:2023-06-19 11:52:33
技术领域
本发明属于合成孔径雷达微波成像技术领域,具体地说,涉及一种基于螺线二维扫描合成孔径雷达三维成像装置及方法。
背景技术
合成孔径激光雷达(Synthetic Aperture Ladar,SAL)是合成孔径雷达(Synthetic Aperture Radar,SAR)在激光波段的一种应用形式,也可称为激光SAR,通过发射宽带激光信号获取纵向高分辨率,通过方位运动形成的合成孔径(虚拟孔径)获取方位向高分辨率,由此形成方位向-距离向二维图像。
由于合成孔径激光雷达的波长较短,雷达和目标间方位向运动形成非常小的角度(约千分之四度,0.07mrad)就可以使合成孔径激光雷达获得0.1m的方位向分辨率图像,这使得合成孔径激光雷达在原理上可以高数据率对远距离目标进行高分辨率成像观测。激光信号相干性提高,已使合成孔径激光雷达的技术实现成为可能,其应用方向包括机载/星载合成孔径激光雷达对地成像以及地基合成孔径激光雷达对空间目标成像。在合成孔径激光雷达除方位向和距离向以外的第三维如交轨向增设孔径并形成阵列,可提高合成孔径激光雷达的交轨分辨率并实现方位向-距离向-交轨向三维成像,对地形测绘和目标识别更具有应用价值。交轨向增设孔径并形成阵列,也可作为是一种基于光学合成孔径的实孔径成像方式。
现有的成像方法中,一维稀疏天线阵列在水平与垂直方向的之字形扫描获取多个平面子阵的回波信号,并结合记录的天线坐标位置信息进行目标成像,最后对多个平面子阵的图像进行拼接得到最终的成像结果。但是,现有的成像方法中阵列需要使用到较多的天线阵元对目标场景进行扫描,存在硬件成本较大,系统体积难以控制的问题。
另外,其他现有的成像方法中,在极坐标格式下得到目标回波,在角度域与频率域,分别完成卷积与积分,得到目标的二维成像结果,高度向的分辨率通过将不同高度面上的散射信息叠加获得。但是,该成像方法存在场景边缘处目标的散焦问题。
现有的成像方法主要针对层析SAR、阵列SAR以及圆周SAR的成像方法,层析对扫描过程中基线稳定要求较高需要在对场景扫描过程中保持天线稳定,且层析SAR不具备前视成像能力,阵列SAR需要满足大尺寸线阵和采样率条件,引起成像系统高成本以及运算量大的问题;圆周SAR模式下只能对场景中心进行扫描而无法进行广域成像。
发明内容
为解决现有技术存在的上述缺陷,本发明提出了一种基于螺线二维扫描合成孔径雷达三维成像方法,该方法针对现有的三维成像模式下成像区域有限,以及多阵列SAR的硬件成本高的问题,能够实现对观测区域的三维成像,与可见光、红外以及X射线等现有技术相比,该方法发射的步进调频超宽带信号能够实现在保证电磁波信号的穿透性的情况下,保证成像结果的高分辨率,且步进形式的信号降低了对于模数转换模块的硬件复杂度要求,无法实现广域成像。
本发明提供一种基于螺线二维扫描合成孔径雷达三维成像装置,该成像装置包括设置在合成孔雷达上的信号发射器、机械扫描机构、天线、回波接收器、模数转换器和数据处理器;
机械扫描机构分别与信号发射器、天线、回波接收器电性连接;回波接收器与模数转换器电性连接;模数转换器与数据处理器电性连接;
所述机械扫描结构,用于同时驱动信号发射器和天线进行匀速旋转的螺线上升运动;
所述信号发射器,用于根据预先设置的采样间隔,发射不同的线性调频步进信号至待测目标场景的不同区域,对待测目标场景进行采样;
所述天线,用于接收从待测目标场景的不同区域反射回的不同的回波信号,并将其输入至回波接收器;
所述回波接收器,用于将接收的不同的回波信号输入至模数转换器;
所述模数转换器,用于将每个回波信号进行模数转换,得到多个数字信号,并将其输入至数据处理器;
所述数据处理器,用于对多个数字信号进行成像处理,得到待测目标场景的三维图像,完成三维成像。
作为上述技术方案的改进之一,所述机械扫描机构包括:驱动器和转盘;转盘上悬挂天线;驱动器安装在转盘上,并驱动转盘旋转,从而携带天线做匀速螺线上升运动,完成对待测目标场景的照射。
作为上述技术方案的改进之一,所述数据处理器包括:相位补偿模块、信号合成模块和三维成像模块;
所述相位补偿模块,用于对每个数字信号沿距离向-方位向进行频域变换后,逐个进行周期与补偿函数H
其中,
H
其中,H
将上述数字信号沿距离向-高度向进行波束域变换后,再逐个进行方位与补偿函数H
其中,
其中,K
所述信号合成模块,用于对于偏移量补偿后的信号以频移量
其中,Δf为步进调频连续波的频率步进长度;n为子带信号序数;N为发射子带信号总数;
其中,B
所述三维成像模块,用于根据匹配函数H
其中,H
其中,
其中,K
其中,匹配函数是根据选取的参考位置(r
将压缩后的信号变换到波数域,再利用波数域成像算法和sinc函数,在波数域进行插值,对参考距离以及非参考距离处的目标实现聚焦,得到待测目标场景的三维图像,完成三维成像。
本发明还提供了一种基于螺线二维扫描合成孔径雷达三维成像方法,该方法包括:
机械扫描结构同时驱动信号发射器和天线进行匀速旋转的螺线上升运动;
信号发射器根据预先设置的采样间隔,发射不同的线性调频步进信号至待测目标场景的不同区域,对待测目标场景进行采样;
天线接收从待测目标场景的不同区域反射回的不同的回波信号,并将其输入至回波接收器;
回波接收器将接收的不同的回波信号输入至模数转换器;
模数转换器将每个回波信号进行模数转换,得到多个数字信号,并将其输入至数据处理器;
数据处理器对多个数字信号进行成像处理,得到待测目标场景的三维图像,完成三维成像。
作为上述技术方案的改进之一,所述数据处理器对多个数字信号进行成像处理,得到待测目标场景的三维图像,完成三维成像;其具体过程为:
相位补偿模块对每个数字信号沿距离向-方位向进行频域变换后,逐个进行周期与补偿函数H
其中,
H
其中,H
将上述数字信号沿距离向-高度向进行波束域变换后,再逐个进行方位与补偿函数H
其中,
其中,K
信号合成模块对于偏移量补偿后的信号以频移量
其中,Δf为步进调频连续波的频率步进长度;n为子带信号序数;N为发射子带信号总数;
其中,B
三维成像模块根据匹配函数H
其中,H
其中,
其中,K
其中,匹配函数是根据选取的参考位置(r
将压缩后的信号变换到波数域,再利用波数域成像算法和sinc函数,在波数域进行插值,对参考距离以及非参考距离处的目标实现聚焦,得到待测目标场景的三维图像,完成三维成像。
本发明与现有技术相比的有益效果是:
1、本发明的方法采用螺线上升式的扫描方式,实现了在短时间内对成像区域的广域成像;
2、本发明的方法采用步进调频连续波信号作为发射信号,提升了成像精度,并且降低了对模数转换模块的硬件要求;
3、本发明的方法,针对信号发射器的实际运动轨迹,采取具有针对性的成像算法进行精确的成像处理。
附图说明
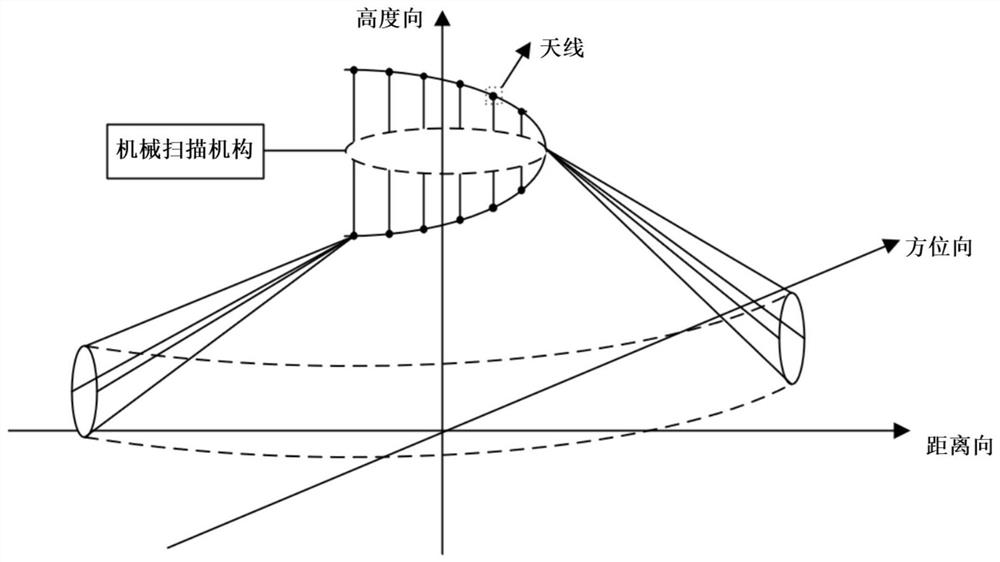
图1是本发明的一种基于螺线二维扫描合成孔径雷达三维成像装置的结构示意图。
具体实施方式
现结合附图对本发明作进一步的描述。
本发明提供了一种基于螺线二维扫描合成孔径雷达三维成像装置,机械扫描机构驱动信号发射器做匀速旋转的螺线上升运动的同时,带动天线做旋转的螺线上升运动;在上升过程中,信号发射器发射线性调频步进信号以指定的脉冲重复间隔对待测目标场景进行螺线上升扫描,将采集到的多个模拟信号分别进行模数转换,获得多个数字信号,并将其输入至数据处理器进行成像处理,获得待测目标场景的三维成像结果。与传统的合成孔径雷达三维成像方法相比,完整的圆轨迹飞行观测之后雷达波束所照射区域将会形成一个环形的成像区域,在相同的观测时间内,提高了方位向上的扫描速度,获得了更大的成像区域与更快的成像速度。
如图1所示,该成像装置为基于螺线二维扫描的超宽带三维雷达成像装置,其包括设置在合成孔雷达上的信号发射器、机械扫描机构、天线、回波接收器、模数转换器和数据处理器;
机械扫描机构分别与信号发射器、天线、回波接收器电性连接;回波接收器与模数转换器电性连接;模数转换器与数据处理器电性连接;
所述机械扫描结构,用于同时驱动信号发射器和天线进行匀速旋转的螺线上升运动;
具体地,所述机械扫描机构包括:驱动器和转盘;转盘上悬挂天线;驱动器安装在转盘上,并驱动转盘旋转,从而携带天线做匀速螺线上升运动,完成对待测目标场景的照射。
所述信号发射器,用于根据预先设置的采样间隔,发射不同的线性调频步进信号至待测目标场景的不同区域,对待测目标场景进行采样;
其中,所述线性调频步进信号为电磁波信号,该电磁波信号为步进调频信号,频率步进数为6,其频率为3GHz-9GHz。
信号发射器可通过分频鉴相器按固定步进量更新分频比对应的调谐电压后经环路滤波,滤波后的输出驱动压控振荡器产生步进调频连续波来实现。
所述天线,用于接收从待测目标场景的不同区域反射回的不同的回波信号,并将其输入至回波接收器;
所述回波接收器,用于将接收的不同的回波信号输入至模数转换器;
所述模数转换器,用于将每个回波信号进行模数转换,得到多个数字信号,并将其输入至数据处理器;
其中,得到的多个数字信号以二维数字信号的形式进行存储。
所述数据处理器,用于对多个数字信号进行成像处理,得到待测目标场景的三维图像,完成三维成像。
具体地,所述数据处理器包括:相位补偿模块、信号合成模块和三维成像模块;
所述相位补偿模块,用于对每个数字信号沿距离向-方位向进行频域变换后,逐个进行周期与补偿函数H
其中,
其中,H
其中,H
将上述相同的数字信号沿到距离向-高度向进行波束域变换后,再逐个进行方位与补偿函数H
其中,
其中,K
所述信号合成模块,用于对于偏移量补偿后的信号以频移量
其中,Δf为步进调频连续波的频率步进长度;n为子带信号序数;N为发射子带信号总数;
其中,B
所述三维成像模块,用于根据匹配函数H
其中,H
其中,
其中,K
其中,匹配函数是根据选取的参考位置(r
将压缩后的信号变换到波数域,再利用波数域成像算法和sinc函数,在波数域进行插值,对参考距离以及非参考距离处的目标实现聚焦,得到待测目标场景的三维图像,完成三维成像。
其中,天线在机械扫描机构的驱动下做旋转同时上升的螺线运动,即匀速旋转的螺线上升运动,机械扫描机构在螺线旋转上升的过程中,信号发射器向外侧发射步进调频连续波信号至待测目标场景,并经待测目标场景反射后,由信号接收器接收反射的多个回波信号,并分别对其进行模数转换,得到多个数字信号。
本发明还提供了一种基于螺线二维扫描的合成孔径雷达三维成像方法,该方法采用步进连续调频信号,降低了对于系统的大小要求,同时天线模块在机械扫描模块的携带下做螺线上升的运动,运动的过程中能够完成场景的快速广域成像。
信号发射器产生电磁波信号,机械扫描模块携带天线模块做匀速旋转同时做匀速上升运动,回波接收模块接收从观测目标处反射回的回波信号;模数转换模块将反射信号转换为数字信号,数据处理模块对回波数据进行成像处理得到观测目标的三维复图像。
该方法包括:
机械扫描结构同时驱动信号发射器和天线进行匀速旋转的螺线上升运动;
信号发射器根据预先设置的采样间隔,发射不同的线性调频步进信号至待测目标场景的不同区域,对待测目标场景进行采样;
天线接收从待测目标场景的不同区域反射回的不同的回波信号,并将其输入至回波接收器;
回波接收器将接收的不同的回波信号输入至模数转换器;
模数转换器将每个回波信号进行模数转换,得到多个数字信号,并将其输入至数据处理器;
数据处理器对多个数字信号进行成像处理,得到待测目标场景的三维图像,完成三维成像。
具体地,步骤1)回波数据方位向偏移量与高度向偏移量补偿,其目的是利用两个补偿函数校正落线旋转上升带来的位置偏移。
对每个数字信号沿距离向-方位向进行频域变换后,逐个进行周期与补偿函数H
其中,
H
其中,H
将上述相同的数字信号沿到距离向-高度向进行波束域变换后,再逐个进行方位与补偿函数H
其中,
其中,K
对每个数字信号重复上述过程,得到多个三维数字信号;
步骤2)子脉冲回波信号合成宽带信号。
对于偏移量补偿后的信号以频移量
其中,Δf为步进调频连续波的频率步进长度;n为子带信号序数;N为发射子带信号总数;
其中,B
步骤3)根据匹配函数H
其中,H
其中,
其中,K
其中,匹配函数是根据选取的参考位置(r
将压缩后的信号变换到波数域,再利用波数域成像算法和sinc函数,在波数域进行插值,对参考距离以及非参考距离处的目标实现聚焦,得到待测目标场景的三维图像,完成三维成像。
最后所应说明的是,以上实施例仅用以说明本发明的技术方案而非限制。尽管参照实施例对本发明进行了详细说明,本领域的普通技术人员应当理解,对本发明的技术方案进行修改或者等同替换,都不脱离本发明技术方案的精神和范围,其均应涵盖在本发明的权利要求范围当中。
- 一种基于螺线二维扫描合成孔径雷达三维成像装置及方法
- 基于二维编码和频域稀疏阵列合成孔径雷达三维成像方法