基于物联网的机器人定向防走偏机构及防走偏方法
文献发布时间:2023-06-19 13:27:45
技术领域
本发明涉及机器人行走机构相关技术领域,具体为基于物联网的机器人定向防走偏机构及防走偏方法。
背景技术
对于一些特殊工作区域或者应对一些物料的转移,多会采用基于物联网的机器人来完成,通过对其进行远程控制,能够有效实现工作人员与工作环境之间的隔离,现有的机器人主要靠履带来行走,能够应对相较复杂的地形,但是对于一些较为精确的代替人工的操作,往往需要机器人的行进方向较为精确,现有的一些地形或者轨道容易受到自然灾害以及温度影响,一旦轨道热胀冷缩发生形变,或者地形受到自然灾害出现坑洼,均会降低机器人行进的精度,进而导致特种作业难以顺利地完成,以此特提出一种基于物联网的能够有效防止机器人走偏,可以提升机器人行进方向精确度的防走偏机构,以解决上述问题。
发明内容
本发明的目的在于提供基于物联网的机器人定向防走偏机构及防走偏方法,以解决上述背景技术中提出的问题。
为实现上述目的,本发明提供如下技术方案:基于物联网的机器人定向防走偏机构,包括机器人本体以及机器人本体底端侧面安装的履带,机器人本体顶端处的侧面安装有视觉摄像头,视觉摄像头与机器人本体的系统终端信号连接,履带包括安装带和伸缩杆,伸缩杆插接在安装带的侧面,且伸缩杆在安装带的侧面等距分布,使其对机器人本体进行稳定的支撑。
安装带由多个安装板组成,多个安装板之间相互铰接,且安装板远离伸缩杆的一侧开设有动力连接槽,机器人本体底端侧面的动力输出轴通过齿轮与连接槽连接,安装板为扇形结构,且安装板的扇形结构与机器人本体底侧的动力输出齿轮相匹配,使履带带动机器人本体行进的过程更加地顺利。
在进一步的实施例中,安装板的侧面开设有多个安装孔,多个安装孔在安装板的侧面等距分布,伸缩杆插接在安装孔的内部,伸缩杆伸入安装孔内部的端部为T字型结构,安装孔靠近开口端的内壁与伸缩杆相匹配,伸缩杆T字型结构端部的侧面与安装孔开口端的内壁之间通过伸缩带连接,使伸缩杆在安装孔内部的复位更加顺畅。
在进一步的实施例中,安装板的侧面靠近安装孔处一体设置有清理环,清理环为四棱台型结构,且清理环的内壁与伸缩杆的外壁贴合,安装孔的内壁开设有多个活动孔,活动孔的内部安装有活动杆,活动孔远离开口端的内壁与活动杆的外壁之间设置有压缩弹簧,活动孔远离开口端的内壁和活动杆的端部均固定有触片,两个触片通过导线连接有逻辑控制器,有利于控制电磁铁和永磁铁之间的相互作用力,进而防止机器人本体在行进过程中出现倾斜。
在进一步的实施例中,活动孔在安装孔的内壁设置有多个,多个活动孔沿安装孔的开口方向等距分布,伸缩杆伸入安装孔内部的端部固定有永磁铁,安装孔远离开口端的内壁固定有电磁铁,电磁铁的输入端通过导线与逻辑控制器的输出端连接,电磁铁与永磁铁正对面的磁性相同。
在进一步的实施例中,履带由多个动力杆组成,多个动力杆在机器人本体的侧面呈阵列分布,机器人本体的底面开设有多个与动力杆相匹配的安装槽,动力杆伸入安装槽内部的一端与安装槽远离开口端的内壁之间设置有压缩弹簧,安装槽远离开口端的内壁安装有压力传感器,压力传感器的侧面与压缩弹簧的端部贴合,压力传感器的输出端与逻辑控制器的输入端连接,实现对转盘转动的停止。
在进一步的实施例中,动力杆的底端开设有转孔,转孔的内部转动安装有转轴,转孔的内壁固定有多个线圈,转轴的外壁固定有多个动力磁铁,转轴的外壁转动安装有两个轴承,且两个轴承的外壁分别与转孔两个端部处的内壁贴合,线圈的输入端通过导线与逻辑控制器的输出端连接,可以为转盘的转动提供较为稳定的动力。
在进一步的实施例中,多个线圈以及多个动力磁铁分别在转孔的内壁以及转轴的外壁环形等距分布,转轴伸出转孔的端部固定有转盘,转盘的外壁一体设置有抓地板,抓地板为V字型结构,抓地板设置有多个,且多个抓地板在转盘的外壁环形等距分布,增加转盘与地面之间多个方向的摩擦力,使履带对机器人本体动力的传输更加稳定。
基于物联网的机器人定向防走偏机构的防走偏方法,具体包括如下步骤;
T1、多个伸缩杆共同对机器人本体起到支撑,遇到凸起路面的伸缩杆向着安装孔的内部伸缩,并能够对凸起的路面实施紧密贴合,既能够保证履带传动的稳定性,还能够利用伸缩杆端部形成的不平整表面,增加与地面之间垂直于履带所在方向的摩擦力,防止机器人本体与地面之间发生相对滑动,进而实现机器人本体的防走偏;
T2、在机器人本体重力的作用下,地面的凸起程度越高,伸缩杆伸入安装孔内部的长度多大,伸缩杆向着安装孔的内部滑动,活动杆和活动孔之间的触片得以贴合,逻辑控制器则会闭合电磁铁的电源,使电磁铁与永磁铁之间产生斥力,越靠近活动孔端部内壁处的触片贴合,通过电磁铁内部的电流越大,则能够增加伸缩杆向着安装孔内部滑动的阻力,从而能够防止机器人本体倾斜,保证预定行进轨迹不会发生改变。
与现有技术相比,本发明的有益效果是:
本发明中记载了基于物联网的机器人定向防走偏机构及防走偏方法,通过伸缩杆在安装孔内部的伸缩,可以使履带的侧面与地面保持贴合,伸缩杆的伸缩能够使履带的侧面保持稳定,并得以是机器人本体的重心不会发生改变,从而能够有效防止机器人本体与地面之间相对滑动,从而防止机器人本体跑偏。
利用转盘外壁的抓地板在能够增加转盘与地面之间摩擦力的同时,还能够增加履带与地面之间沿垂直于履带方向的摩擦力,不仅能够保证机器人本体行进过程的稳定性,还能够有效防止机器人本体与地面之间相对滑动,造成机器人本体的偏移。
附图说明
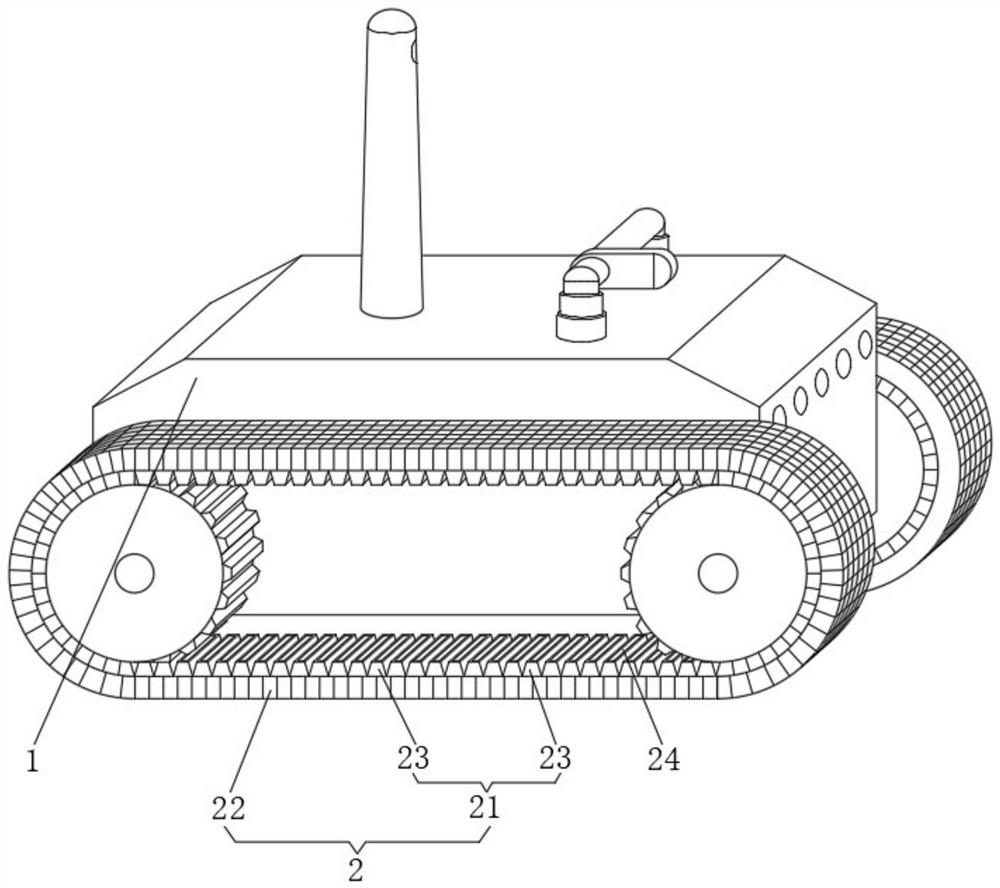
图1为本发明实施例机器人本体结构图;
图2为本发明实施例安装板正剖图;
图3为本发明实施例图2中A处结构放大图;
图4为本发明实施例2机器人本体结构图;
图5为本发明实施例2机器人本体局部剖视图;
图6为本发明实施例图5中B处结构放大图;
图7为本发明实施例抓地板结构图。
图中:1、机器人本体;2、履带;21、安装带;22、伸缩杆;23、安装板;24、连接槽;25、安装孔;26、伸缩带;27、清理环;28、活动孔;29、活动杆;291、触片;292、永磁铁;293、电磁铁;3、动力杆;31、安装槽;32、转孔;33、转轴;34、线圈;35、动力磁铁;36、转盘;37、抓地板。
具体实施方式
在下文的描述中,给出了大量具体的细节以便提供对本发明更为彻底的理解。然而,对于本领域技术人员而言显而易见的是,本发明可以无需一个或多个这些细节而得以实施。在其他的例子中,为了避免与本发明发生混淆,对于本领域公知的一些技术特征未进行描述。
实施例1
请参阅图1-3,本实施例提供了基于物联网的机器人定向防走偏机构,包括机器人本体1以及机器人本体1底端侧面安装的履带2,一般情况下,采用履带2可以使机器人本体1的行进过程更加地顺畅,同时履带2能够应对多种复杂地形。
为了能够使机器人本体1的远程控制更加地方便,机器人本体1顶端处的侧面安装有视觉摄像头,视觉摄像头与机器人本体1的系统终端信号连接,通过向终端实时传输现场画面,能够方便工作人员对机器人本体1的行进过程进行相应的调控,同时有利于特种作业的顺利进行。
现有技术中的履带2能够发生一定程度的形变,但是在进行特种作业时,现有的履带2无法有效防止机器人本体1在地面的滑动。
本发明中的履带2包括安装带21和伸缩杆22,伸缩杆22插接在安装带21的侧面,且伸缩杆22在安装带21的侧面等距分布,能够为机器人本体1提供较为稳定的支撑力。
其中,安装带21由多个安装板23组成,多个安装板23之间相互铰接,安装板23为扇形结构,安装板23的侧面开设有多个安装孔25,多个安装孔25在安装板23的侧面等距分布,伸缩杆22插接在安装孔25的内部,伸缩杆22通过受压在安装孔25内部滑动,其伸缩杆22端部所形成的凹面能够与凸起的地面紧密贴合,可以增加履带与地面之间的摩擦力,从而防止机器人本体与地面之间产生相对滑动。
优选的,为了防止伸缩杆22与安装孔25之间意外分离,伸缩杆22伸入安装孔25内部的端部为T字型结构,安装孔25靠近开口端的内壁与伸缩杆22相匹配,为了使伸缩杆22在安装孔25内部的复位更加快速,伸缩杆22 T字型结构端部的侧面与安装孔25开口端的内壁之间通过伸缩带26连接,进一步提升伸缩杆22为机器人本体进行支撑的稳定性。
优选的,安装板23远离伸缩杆22的一侧开设有动力连接槽24,机器人本体1底端侧面的动力输出轴通过齿轮与连接槽24连接,且安装板23的扇形结构与机器人本体1底侧的动力输出齿轮相匹配,不仅使履带的转动更加稳定,同时还能够减少相邻安装板23之间的间隙。
为了防止机器人本体1在行进过程中的倾斜角度过大,安装孔25的内壁开设有多个活动孔28,活动孔28的内部安装有活动杆29,活动孔28远离开口端的内壁与活动杆29的外壁之间设置有压缩弹簧,活动孔28远离开口端的内壁和活动杆29的端部均固定有触片291,两个触片291通过导线连接有逻辑控制器,触片291连接使逻辑控制器接收到电平信号,进而能够对电磁铁293施加与触片291所在位置对应的电流。
其中,安装板23的侧面靠近安装孔25处一体设置有清理环27,清理环27为四棱台型结构,且清理环27的内壁与伸缩杆22的外壁贴合,能够有效防止地面的灰尘或者尘土进入安装孔25的内部。
为了,进一步地防止机器人本体1在行进过程中倾斜,活动孔28在安装孔25的内壁设置有多个,多个活动孔28沿安装孔25的开口方向等距分布,伸缩杆22伸入安装孔25内部的端部固定有永磁铁292,安装孔25远离开口端的内壁固定有电磁铁293,电磁铁293的输入端通过导线与逻辑控制器的输出端连接,电磁铁293与永磁铁292正对面的磁性相同,逻辑控制器根据闭合触片291所在位置对应的电流通过电磁铁291,能够直接改变伸缩杆22向着安装孔25内部行进的阻力,从而能够防止机器人本体1发生较大角度的倾斜,保证伸缩杆22对机器人本体1支撑的稳定性。
实施例2
请参阅图4-7,在实施例1的基础上做了进一步改进:特种作业区域存在着泥泞路段,现有的履带遇到泥泞路段难免发生打滑现象,从而造成机器人本体1的偏移。
为了保证机器人本体1在泥泞路段行进的稳定性,履带2由多个动力杆3组成,多个动力杆3在机器人本体1的侧面呈阵列分布,机器人本体1的底面开设有多个与动力杆3相匹配的安装槽31,动力杆3伸入安装槽31内部的一端与安装槽31远离开口端的内壁之间设置有压缩弹簧,安装槽31远离开口端的内壁安装有压力传感器,压力传感器的侧面与压缩弹簧的端部贴合,压力传感器的输出端与逻辑控制器的输入端连接。
其中,当压力传感器受到较大的压力时,逻辑控制器会断开线圈34的电源,尽可能地使与凸起接触的转盘36以及抓地板37保持静止,进而能够增加其自身与路面的摩擦力,防止机器人本体1在路面进行较大程度的位移。
为了使履带2获得较为的稳定的动力来源,动力杆3的底端开设有转孔32,转孔32的内部转动安装有转轴33,转孔32的内壁固定有多个线圈34,转轴33的外壁固定有多个动力磁铁35,转轴33的外壁转动安装有两个轴承,且两个轴承的外壁分别与转孔32两个端部处的内壁贴合,线圈34的输入端通过导线与逻辑控制器的输出端连接,利用现有技术中电动马达的原理,转轴33以及动力磁铁35作为转子,转孔32以及线圈34作为定子,置药线圈34通电,转轴33便能够带动转盘36转动。
其中,多个线圈34以及多个动力磁铁35分别在转孔32的内壁以及转轴33的外壁环形等距分布,转轴33伸出转孔32的端部固定有转盘36,转盘36的外壁一体设置有抓地板37。
优选的,现有技术中只能够增加单个方向的摩擦力,本发明中抓地板37为V字型结构,抓地板37设置有多个,且多个抓地板37在转盘36的外壁环形等距分布,能够增加履带与地面之间多个方向的摩擦力,进一步地提升机器人本体1防偏移的性能。
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
- 基于物联网的机器人定向防走偏机构及防走偏方法
- 一种基于物联网防走偏的机器人及其使用方法