一种大健康智能医疗集液系统及控制方法
文献发布时间:2023-06-19 13:27:45
技术领域
本发明涉及医疗集液系统领域,尤其是涉及一种大健康智能医疗集液系统及控制方法。
背景技术
医用负压吸引瓶是医院手术室和病房常用的器具,目前医院普通使用的是两个负压吸引瓶外挂式吸引装置和负压显示仪表。主要用于医院医疗吸引系统,供医疗吸液、脓、血、痰及分泌物使用。
现有技术中,为了能够在负压吸引瓶装满时及时更换新的负压吸引瓶,负压吸引瓶是透明的,医护人员需要时常查看负压吸引瓶的容量。由于负压吸引瓶主要用于吸液、脓、血、痰及分泌物等,使负压吸引瓶中的景象十分令人感到不适,会对医护人员的心理、精神和生理造成很大压力,容易导致心理疾病。且对于负压吸引瓶的更换需要人工更换,十分不方便。因此,需要一种大健康智能医疗集液系统。
发明内容
本发明所要解决的是如何降低医疗集液系统对医护人员心理健康的影响的技术问题,提供了一种大健康智能医疗集液系统及控制方法。
本发明解决其技术问题所采用的技术方案是:
一种大健康智能医疗集液系统,包括:外壳;旋转盘,下部中心通过轴承旋转设置于外壳内,旋转盘的转轴固定有第一电机,旋转盘上部中心设置有安装架,安装架侧面均匀固定有若干滑动固定结构,旋转盘上方设置有第一集液罐,第一集液罐侧方设置有若干第二集液罐,第一集液罐和第二集液罐设置于滑动固定结构内,第一集液罐和第二集液罐的上端设置有相同的第一外螺纹,旋转盘顶面上设置有若干压力传感器,压力传感器设置于第一集液罐或第二集液罐下方;降噪板,设置于第一集液罐上方,降噪板的下方设置有下限位环,下限位环固定于外壳内侧面上,下限位环上方固定有若干第一弹簧,第一弹簧上端与降噪板相接;伸缩结构,竖向固定于降噪板底部,伸缩结构的伸缩端设置有密封盖,密封盖位于第一集液罐正上方,密封盖上部通过轴承与伸缩结构的伸缩端固定,密封盖内侧面上设置有第一内螺纹,第一内螺纹与第一外螺纹相适应,密封盖侧面上设置有外齿轮,外齿轮为斜齿轮,斜齿轮的倾斜方向与第一集液罐和第二集液罐的上端的第一外螺纹的倾斜方向相反,密封盖侧方设置有驱动齿轮,驱动齿轮与外齿轮啮合,驱动齿轮通过轴承固定于伸缩结构的伸缩端上,驱动齿轮的转轴连接有第二电机,第二电机为正反转电机,密封盖的上方设置有软管和负压管,软管一端与密封盖内部连通,另一端穿过外壳处于外界中,负压管一端与密封盖内部连通,另一端连接有过滤装置,过滤装置的出口端连接有气泵,气泵的排气口与外界连通,气泵上设置有气压计;红绿指示灯,红绿指示灯设置于外壳表面;控制系统,控制系统与压力传感器、旋转盘、伸缩结构、第二电机、第一电机、气压计和红绿指示灯连接。
启动气泵,通过负压管对第一集液罐中的空气进行吸取,控制系统根据气压计的数据实时调节气泵的功率,使第一集液罐中维持稳定的负压,然后控制红绿指示灯亮红灯。医护人员通过软管对病人的病变组织处的积液进行吸取,使污液在负压的作用下通过软管进入第一集液罐中,使第一集液罐的重量增加,带动密封板向下移动,当第一集液罐落到旋盘上时,被压力传感器感应到,此时,控制系统控制红绿指示灯发红光,提醒医护人员医疗集液系统将要更换集液罐,并关闭气泵。控制驱动齿轮旋转,带动密封盖旋转,使密封盖向上移动,当压力传感器的数据稳定后,控制伸缩结构收缩,使密封盖与第一集液罐的上端分离。控制旋转盘转动,使相邻的第二集液罐移动到密封盖正下方,控制伸缩结构伸长,使密封盖与第二集液罐的上端口相接,控制驱动齿轮转动,使密封盖转动,通过螺纹将第二集液罐密封,在第一弹簧的作用下使第二集液罐向上移动,然后启动气泵,通过负压管使第二集液罐形成稳定的负压,控制红绿指示灯亮绿灯。红绿指示灯亮绿灯表示可以使用,亮红灯表示不能使用。设置第一弹簧,用于使密封盖与第一集液罐弹性适应,并在密封盖与第一集液罐分离时,为密封盖提供向上的力,在结合的时候提供向下的力,为其提供助力。第一弹簧的弹力需要满足:密封盖和空的第一集液罐结合时,使第一集液罐与旋转盘分离,与满的第一集液罐结合时,使第一集液罐刚好落到旋转盘上。设置驱动齿轮与外齿轮,用于将密封盖与第一集液罐密封。设置滑动固定结构,用于防止集液罐转动,使其只能上下移动。设置压力传感器,由于第一弹簧的作用,当密封盖与第一集液罐连接和分离时,旋转盘受到的压力不同,可以由此判断其相互连接情况。设置斜齿轮的倾斜方向与第一集液罐和第二集液罐的上端的第一外螺纹的倾斜方向相反,用于在密封盖与第一集液罐分离时,使驱动齿轮对密封盖施加向上的力,在密封盖与第一集液罐结合时,使驱动齿轮对密封盖施加向下的力,为其提供助力。设置斜齿轮,用于降低噪声,维持良好的环境。密封盖向下移动时,在密封盖接触到第一集液罐时,再移动一小段距离,使密封盖压盖在第一集液罐上,有利于旋紧。
进一步的,包括:若干固定结构,固定于旋转盘上,位于第一集液罐或第二集液罐下方,且与第一集液罐或第二集液罐的下端相配合,固定机构包括:内固定环,内固定环为半圆环状,设置于第一集液罐或第二集液罐内侧,内固定环内侧面上设置有滑动槽,滑动槽为半圆环状,一端延伸至内固定环侧面,其下方连通有固定空腔,固定空腔下端延伸至旋转盘上部,固定空腔内设置有第二弹簧,内固定环侧面上设置有限位口,下端与旋转盘相接,且与固定空腔连通,限位口的横向宽度小于固定空腔的横向宽度,内固定环内侧面上竖向设置有防旋槽,防旋槽设置于内固定环中部,面向外侧,位于滑动槽上方,上端延伸至内固定环上部,防旋槽内设置有防旋凸起,防旋凸起与第一集液罐或第二集液罐固定;外固定环,外固定环为半圆环状,外固定环为铁磁性材料,设置于第一集液罐或第二集液罐外侧,一端设置于滑动槽内,外固定环可在滑动凹槽内以内固定环的轴线为转动轴线滑动,外固定环处于滑动槽内的一端连接有限位块,限位块为长方块,限位块与滑动槽和固定空腔相适应;电磁铁,设置于旋转盘上部,处于外固定环下方。
将集液罐的防旋凸起对准防旋槽,放置于内固定环内,滑动外固定环,将集液罐包围,启动电磁铁,使外固定环向下移动,使外固定环固定。当需要将集液罐取出时,关闭电磁铁,外固定环在弹簧的作用下上移,滑动固定环,使集液罐的外侧没有遮挡物,将集液罐平移出来。当集液罐装满时比较重,一般需要向上提出固定座,再平移出来,比较费力。设置内固定环和可滑动的外固定环,用于去除上提的动作,节省体力。设置电磁铁对外固定环进行固定,用于使外固定环的打开更方便。设置防旋槽面向外侧,用于在防旋的同时方便取出。设置限位块为长方块,防止外固定环转动。可移动的外固定环设置于外侧,用于方便取出集液罐。
进一步的,包括:外固定环远离限位块的一端设置有推动把,推动把为T型块,推动把设置于外固定环外侧,推动把的两端分别与内固定环的两侧相配合,推动把表面为磨砂面。
通过推动把对外固定环进行滑动,更加方便。外固定环推动到两个位置端点后,推动板能够夹在内固定环上,能够使外固定环更加稳定。若不设置推动把,将外固定环推入滑动槽后,取出比较麻烦。设置推动把,用于使对外固定环的推动更加方便省力。设置推动把表面为磨砂面,用于增加推动把与内固定环外侧面的摩擦力,防止内固定环来回滑动。
进一步的,包括:转动门,转动门设置于外壳远离第一集液罐的侧面上,转动门与外壳通过转轴转动连接,转动门上设置有开门感应器,转动门上设置有把手,转动门远离转轴的侧面上设置有关门片,关门片通过转轴与转动门转动连接,关门片的外端处于转动门外侧,关门片与转动门之间设置有第三弹簧,关门片与外壳相配合,关门片侧面设置有防滑凸起;外壳、转动门、降噪板内部设置有矿渣棉层。
若一次性处理的污液过多,超过了集液罐的数量,则需要人工进行更换。通过关门片压缩第三弹簧,将转动门打开,此时开门感应器感应到信号,控制转动门附近的电磁铁断电,并控制滑动固定结构打开。工作人员通过推动把滑动外固定环,将集液罐取出,并换上新的集液罐,推动外固定环的推动把使其压在内固定环的外侧面上,关闭转动门,此时开门感应器感应不到信号,控制电磁铁通电,使外固定环下移固定,对集液罐进行固定。设置矿渣棉层,用于吸收装置内部产生的噪声,营造良好的环境。
进一步的,包括:滑动固定结构包括:两个稳定齿轮,稳定齿轮通过轴承固定于安装架上,相互啮合,稳定齿轮的轴线竖向设置,稳定齿轮的转轴连接有第三电机,第三电机为正反转电机;两个稳定板,两个稳定板为半圆筒状,竖向设置于第一集液罐或第二集液罐的两侧,内侧分别与两个稳定齿轮侧面固定,稳定板内侧设置有若干滚轮,滚轮的轴线沿横向设置,通过轴承转动设置于稳定板的内侧面上,滚轮的直径由中部相两端逐渐增大,滚轮与第一集液罐或第二集液罐的侧面相适应,滚轮表面设置有橡胶层。
启动第三电机,使两个稳定齿轮共同转动,使两个稳定板共同转动,实现对集液罐的夹持和放开。在集液罐上下移动时,使滚轮转动,降低阻力。在集液罐自转时,滚轮表面的的橡胶层对集液罐施加阻力。设置两个稳定齿轮啮合,用于使两个稳定板对称转动,降低故障发生概率。设置若干滚轮,用于实现上下可移动,自转不可移动。设置滚轮的直径由中部相两端逐渐增大,用于增大接触面积。
进一步的,包括:伸缩结构包括:第一套筒,固定于降噪板底部,第一套筒下端固定有防旋环,防旋环内侧面上设置有若干齿轮状凸起,第一套筒内设置有第二套筒,第二套筒下端与第一套筒通过轴承转动连接,其轴线沿竖向设置,且内侧面上设置有第二内螺纹,第二套筒的内径小于若干齿轮状凸起的内接圆内径,第二套筒上端连接有第四电机,第四电机为正反转电机,固定于第一套筒内侧面上;伸缩杆,伸缩杆上端依次穿过防旋环、第一套筒表面和第二套筒表面处于第二套筒内,伸缩杆上端设置有第二外螺纹,第二外螺纹与第二内螺纹相适应,伸缩杆中部表面与若干齿轮状凸起相适应,伸缩杆下端贯穿密封盖上部处于密封盖内,与密封盖通过轴承转动连接,伸缩杆下部设置有连通空腔,连通空腔向下与密封盖连通;软管和负压管的端口穿过伸缩杆表面设置于连通空腔内。
第四电机启动,使第二套杆转动,使伸缩杆上下移动。设置防旋环,与螺纹配合,使伸缩杆上下移动。设置连通空腔,用于防止软管和负压管的被带着转动,造成其断裂。
进一步的,包括:软管和负压管的端口相对设置;分隔板,分隔板竖向设置于连通空腔内,位于软管和负压管之间,分隔板面向软管的一侧设置有纳米疏水涂层,面向负压管的一侧设置有纳米亲水涂层;电动夹,设置于伸缩杆上,夹持于软管上。
污液从软管排出,被分隔板阻挡,落到集液罐中。气流流入负压管中,其中的液体被分隔板上的纳米亲水涂层吸附,回落到集液罐中。若不设置分隔板,污液中的杂质容易进入负压管中造成堵塞。设置电动夹,用于在更换集液罐时将软管夹紧,防止软管中的污液回流。
进一步的,包括:过滤装置包括:移动板,设置于机体内,一侧连接有拉板,拉板设置于机体外侧,移动板上设置有若干滚轮;过滤盒,过滤盒为隔热材料,设置于移动板上,过滤盒的内部底面为倾斜面,沿气流方向由内到外向上倾斜,过滤盒内设置有过滤网,过滤网与过滤盒内侧面紧贴,过滤网内侧设置有阻挡板,阻挡板上部与过滤盒固定,阻挡板内侧面上设置有纳米亲水涂层,阻挡板下方设置有石灰粉,石灰粉位于过滤网内侧;消毒瓶,设置于移动板上,位于过滤盒侧方,通过管道与过滤盒连通,消毒瓶另一侧与气泵连接,消毒瓶内设置有消毒液;气泵设置于移动板上,气泵的排气孔设置于外壳下部,面向地面。
气流从负压管流入过滤盒中,从阻挡板下方流过,被过滤网过滤,之后进入消毒瓶中,最后通过气泵被排出到外界。当需要对过滤盒和消毒瓶进行清理和补充时,通过拉板和移动板将过滤盒和消毒瓶拉到外界进行处理。由于气流中含有许多的病毒和细菌,因此需要进行消毒和过滤。设置石灰粉,与气流中的水分发生化学反应生成强碱并放热,对细菌和病毒进行灭杀。设置过滤盒的内部底面为倾斜面,用于将过滤网过滤的水分和细菌病毒导向石灰粉中。设置阻挡板,用于对气流中的水分进行吸附,使气流经过石灰粉表面,降低过滤网的压力。设置消毒瓶和消毒液,用于对气流进行消毒,且气流能够带着消毒液对外界环境进行消毒。设置气泵的排气孔面向地面,用于将气流中多余的消毒液留在地面上。
一种大健康智能医疗集液系统的控制方法,包括:当需要使用时,实行以下步骤:A1:控制系统启动气泵,通过负压管对第一集液罐中的空气进行吸取,并根据气压计的数据进行实时调节,直到气压达到工作气压,控制红绿指示灯亮绿灯;A2:当第一集液罐与压力感应接触时,控制红绿指示灯亮红灯,并在5秒后控制电动夹将软管夹紧,关闭气泵;通过第二电机控制驱动齿轮旋转,带动密封盖旋转,使密封盖向上移动,当压力传感器的数据稳定后,通过第四电机控制伸缩杆向上移动,使密封盖与第一集液罐分离;A3:通过第一电机使旋转盘旋转,使相邻的第二集液罐转动到密封盖下方,通过第四电机控制伸缩杆向下移动,使密封盖盖压到第二集液罐上;当压力传感器感应到后,通过第二电机控制驱动齿轮旋转,使密封盖与第二集液罐通过螺纹固定,在第一弹簧的作用下,使第二集液罐脱离旋转盘;A4:启动气泵,直到气压计数据达到工作气压,控制红绿指示灯亮绿灯。
在红绿指示灯亮红灯时,延迟5秒,用于给医护人员反应时间。医护人员不需要时刻盯着集液瓶,只中注意红绿指示灯,有利于维护医护人员的心理健康。
进一步的,包括:在医疗集液系统工作时对集液罐进行更换,实行以下步骤:B1:医护人员通过关门片打开转动门,当开门感应器感应到开门后,控制系统断开靠近转动门的电磁铁的电源,控制系统通过第三电机控制稳定齿轮转动,使两个稳定板与集液罐分离;B2:医护人员通过推动把将外固定环拨动到一边,将集液罐更换,然后通过推动把将外固定环拨动到前方;B3:将转动门关上,当开门感应器无法感应到开门时,控制系统连接电磁铁的电源,使外固定环向下移动,通过第三电机控制稳定齿轮转动,使两个稳定板与集液罐结合。
通过转动门的开启和关闭控制电磁铁,实现智能化处理,有利于降低医护人员的工作强度。
本发明的有益效果:
1、设置集液罐自动更换,可以提高医护人员的心理健康。
2、设置外固定环和可滑动的内固定环,可以降低医护人员的工作强度。
3、设置过滤装置,可防止细菌和病毒污染环境,并可以对环境进行消毒。
附图说明
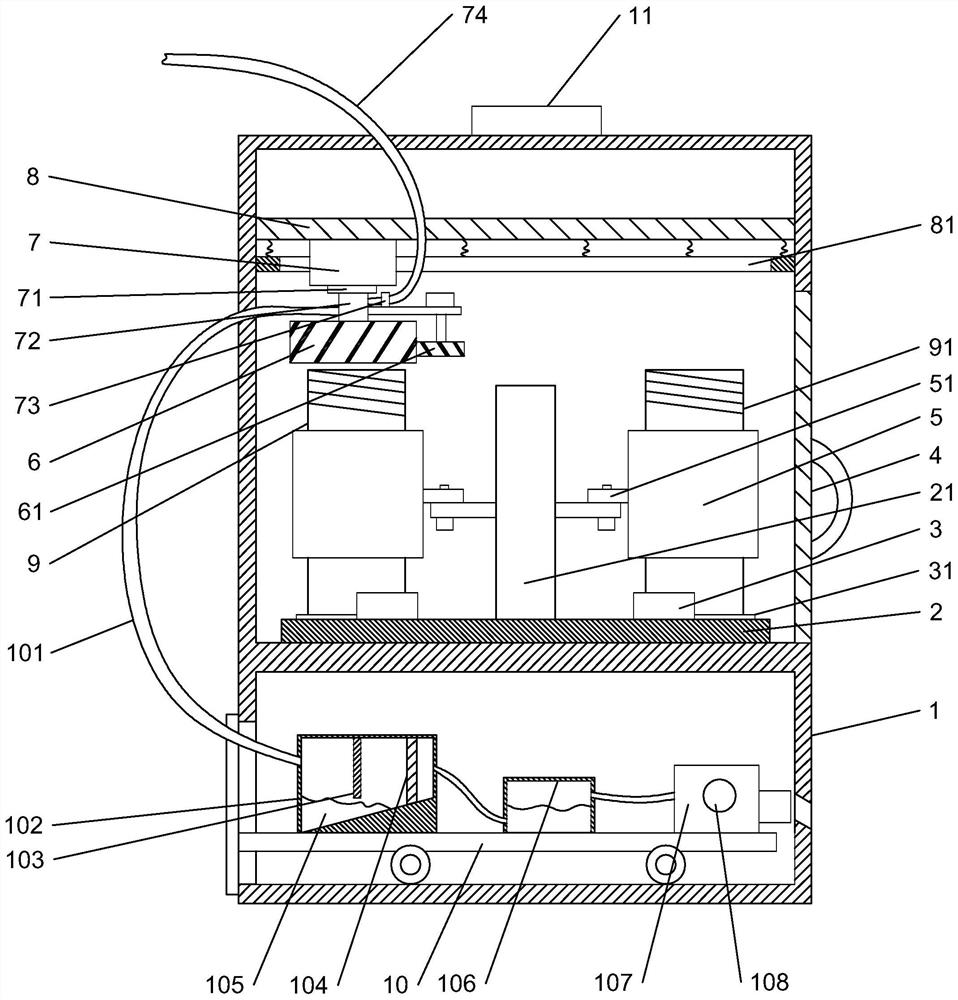
图1是本医疗集液系统的内部结构示意图;
图2是本医疗集液系统的内固定环示意图;
图3是本医疗集液系统的外固定环的示意图;
图4是本医疗集液系统的滑动固定结构示意图;
图5是本医疗集液系统的伸缩结构示意图;
附图标记说明:
1、外壳;11、红绿指示灯;
2、旋转盘;21、安装架;
3、内固定环;31、外固定环;32、防旋槽;33、滑动槽;34、限位口;35、限位块;36、推动把;
4、转动门;
5、稳定板;51、稳定齿轮;52、滚轮;
6、密封盖;61、驱动齿轮;
7、第一套筒;71、防旋环;72、伸缩杆;721、分隔板;722、连通空腔;73、电动夹;74、软管;75、第二套筒;
8、降噪板;81、下限位环;
9、第一集液罐;91、第二集液罐;
10、移动板;101、负压管;102、过滤盒;103、阻挡板;104、过滤网;105、石灰粉;106、消毒瓶;107、气泵;108、气压计。
具体实施方式
以下将结合实施例对本发明的构思及产生的技术效果进行清楚、完整地描述,以充分地理解本发明的目的、特征和效果。
实施例1:
如图1所示,一种大健康智能医疗集液系统,包括:外壳1;旋转盘2,下部中心通过轴承旋转设置于外壳1内,旋转盘2的转轴固定有第一电机,旋转盘2上部中心设置有安装架21,安装架21侧面均匀固定有若干滑动固定结构,旋转盘2上方设置有第一集液罐9,第一集液罐9侧方设置有若干第二集液罐91,第一集液罐9和第二集液罐91设置于滑动固定结构内,第一集液罐9和第二集液罐91的上端设置有相同的第一外螺纹,旋转盘2顶面上设置有若干压力传感器,压力传感器设置于第一集液罐9或第二集液罐91下方;降噪板8,设置于第一集液罐9上方,降噪板8的下方设置有下限位环81,下限位环81固定于外壳1内侧面上,下限位环81上方固定有若干第一弹簧,第一弹簧上端与降噪板8相接;伸缩结构,竖向固定于降噪板8底部,伸缩结构的伸缩端设置有密封盖6,密封盖6位于第一集液罐9正上方,密封盖6上部通过轴承与伸缩结构的伸缩端固定,密封盖6内侧面上设置有第一内螺纹,第一内螺纹与第一外螺纹相适应,密封盖6侧面上设置有外齿轮,外齿轮为斜齿轮,斜齿轮的倾斜方向与第一集液罐9和第二集液罐91的上端的第一外螺纹的倾斜方向相反,密封盖6侧方设置有驱动齿轮61,驱动齿轮61与外齿轮啮合,驱动齿轮61通过轴承固定于伸缩结构的伸缩端上,驱动齿轮61的转轴连接有第二电机,第二电机为正反转电机,密封盖6的上方设置有软管74和负压管101,软管74一端与密封盖6内部连通,另一端穿过外壳1处于外界中,负压管101一端与密封盖6内部连通,另一端连接有过滤装置,过滤装置的出口端连接有气泵107,气泵107的排气口与外界连通,气泵107上设置有气压计108;红绿指示灯11,红绿指示灯11设置于外壳1表面;控制系统,控制系统与压力传感器、旋转盘2、伸缩结构、第二电机、第一电机、气压计108和红绿指示灯11连接。
启动气泵107,通过负压管101对第一集液罐9中的空气进行吸取,控制系统根据气压计108的数据实时调节气泵107的功率,使第一集液罐9中维持稳定的负压,然后控制红绿指示灯11亮红灯。医护人员通过软管74对病人的病变组织处的积液进行吸取,使污液在负压的作用下通过软管74进入第一集液罐9中,使第一集液罐9的重量增加,带动密封板向下移动,当第一集液罐9落到旋盘上时,被压力传感器感应到,此时,控制系统控制红绿指示灯11发红光,提醒医护人员医疗集液系统将要更换集液罐,并关闭气泵107。控制驱动齿轮61旋转,带动密封盖6旋转,使密封盖6向上移动,当压力传感器的数据稳定后,控制伸缩结构收缩,使密封盖6与第一集液罐9的上端分离。控制旋转盘2转动,使相邻的第二集液罐91移动到密封盖6正下方,控制伸缩结构伸长,使密封盖6与第二集液罐91的上端口相接,控制驱动齿轮61转动,使密封盖6转动,通过螺纹将第二集液罐91密封,在第一弹簧的作用下使第二集液罐91向上移动,然后启动气泵107,通过负压管101使第二集液罐91形成稳定的负压,控制红绿指示灯11亮绿灯。红绿指示灯11亮绿灯表示可以使用,亮红灯表示不能使用。设置第一弹簧,用于使密封盖6与第一集液罐9弹性适应,并在密封盖6与第一集液罐9分离时,为密封盖6提供向上的力,在结合的时候提供向下的力,为其提供助力。第一弹簧的弹力需要满足:密封盖6和空的第一集液罐9结合时,使第一集液罐9与旋转盘2分离,与满的第一集液罐9结合时,使第一集液罐9刚好落到旋转盘2上。设置驱动齿轮61与外齿轮,用于将密封盖6与第一集液罐9密封。设置滑动固定结构,用于防止集液罐转动,使其只能上下移动。设置压力传感器,由于第一弹簧的作用,当密封盖6与第一集液罐9连接和分离时,旋转盘2受到的压力不同,可以由此判断其相互连接情况。设置斜齿轮的倾斜方向与第一集液罐9和第二集液罐91的上端的第一外螺纹的倾斜方向相反,用于在密封盖6与第一集液罐9分离时,使驱动齿轮61对密封盖6施加向上的力,在密封盖6与第一集液罐9结合时,使驱动齿轮61对密封盖6施加向下的力,为其提供助力。设置斜齿轮,用于降低噪声,维持良好的环境。密封盖6向下移动时,在密封盖6接触到第一集液罐9时,再移动一小段距离,使密封盖6压盖在第一集液罐9上,有利于旋紧。
如图2和图3所示,包括:若干固定结构,固定于旋转盘2上,位于第一集液罐9或第二集液罐91下方,且与第一集液罐9或第二集液罐91的下端相配合,固定机构包括:内固定环3,内固定环3为半圆环状,设置于第一集液罐9或第二集液罐91内侧,内固定环3内侧面上设置有滑动槽33,滑动槽33为半圆环状,一端延伸至内固定环3侧面,其下方连通有固定空腔,固定空腔下端延伸至旋转盘2上部,固定空腔内设置有第二弹簧,内固定环3侧面上设置有限位口34,下端与旋转盘2相接,且与固定空腔连通,限位口34的横向宽度小于固定空腔的横向宽度,内固定环3内侧面上竖向设置有防旋槽32,防旋槽32设置于内固定环3中部,面向外侧,位于滑动槽33上方,上端延伸至内固定环3上部,防旋槽32内设置有防旋凸起,防旋凸起与第一集液罐9或第二集液罐91固定;外固定环31,外固定环31为半圆环状,外固定环31为铁磁性材料,设置于第一集液罐9或第二集液罐91外侧,一端设置于滑动槽33内,外固定环31可在滑动凹槽内以内固定环3的轴线为转动轴线滑动,外固定环31处于滑动槽33内的一端连接有限位块35,限位块35为长方块,限位块35与滑动槽33和固定空腔相适应;电磁铁,设置于旋转盘2上部,处于外固定环31下方。
将集液罐的防旋凸起对准防旋槽32,放置于内固定环3内,滑动外固定环31,将集液罐包围,启动电磁铁,使外固定环31向下移动,使外固定环31固定。当需要将集液罐取出时,关闭电磁铁,外固定环31在弹簧的作用下上移,滑动固定环,使集液罐的外侧没有遮挡物,将集液罐平移出来。当集液罐装满时比较重,一般需要向上提出固定座,再平移出来,比较费力。设置内固定环3和可滑动的外固定环31,用于去除上提的动作,节省体力。设置电磁铁对外固定环31进行固定,用于使外固定环31的打开更方便。设置防旋槽32面向外侧,用于在防旋的同时方便取出。设置限位块35为长方块,防止外固定环31转动。可移动的外固定环31设置于外侧,用于方便取出集液罐。
包括:外固定环31远离限位块35的一端设置有推动把36,推动把36为T型块,推动把36设置于外固定环31外侧,推动把36的两端分别与内固定环3的两侧相配合,推动把36表面为磨砂面。
通过推动把36对外固定环31进行滑动,更加方便。外固定环31推动到两个位置端点后,推动板能够夹在内固定环3上,能够使外固定环31更加稳定。若不设置推动把36,将外固定环31推入滑动槽33后,取出比较麻烦。设置推动把36,用于使对外固定环31的推动更加方便省力。设置推动把36表面为磨砂面,用于增加推动把36与内固定环3外侧面的摩擦力,防止内固定环3来回滑动。
包括:转动门4,转动门4设置于外壳1远离第一集液罐9的侧面上,转动门4与外壳1通过转轴转动连接,转动门4上设置有开门感应器,转动门4上设置有把手,转动门4远离转轴的侧面上设置有关门片,关门片通过转轴与转动门4转动连接,关门片的外端处于转动门4外侧,关门片与转动门4之间设置有第三弹簧,关门片与外壳1相配合,关门片侧面设置有防滑凸起;外壳1、转动门4、降噪板8内部设置有矿渣棉层。
若一次性处理的污液过多,超过了集液罐的数量,则需要人工进行更换。通过关门片压缩第三弹簧,将转动门4打开,此时开门感应器感应到信号,控制转动门4附近的电磁铁断电,并控制滑动固定结构打开。工作人员通过推动把36滑动外固定环31,将集液罐取出,并换上新的集液罐,推动外固定环31的推动把36使其压在内固定环3的外侧面上,关闭转动门4,此时开门感应器感应不到信号,控制电磁铁通电,使外固定环31下移固定,对集液罐进行固定。设置矿渣棉层,用于吸收装置内部产生的噪声,营造良好的环境。
如图4所示,包括:滑动固定结构包括:两个稳定齿轮51,稳定齿轮51通过轴承固定于安装架21上,相互啮合,稳定齿轮51的轴线竖向设置,稳定齿轮51的转轴连接有第三电机,第三电机为正反转电机;两个稳定板5,两个稳定板5为半圆筒状,竖向设置于第一集液罐9或第二集液罐91的两侧,内侧分别与两个稳定齿轮51侧面固定,稳定板5内侧设置有若干滚轮52,滚轮52的轴线沿横向设置,通过轴承转动设置于稳定板5的内侧面上,滚轮52的直径由中部相两端逐渐增大,滚轮52与第一集液罐9或第二集液罐91的侧面相适应,滚轮52表面设置有橡胶层。
启动第三电机,使两个稳定齿轮51共同转动,使两个稳定板5共同转动,实现对集液罐的夹持和放开。在集液罐上下移动时,使滚轮52转动,降低阻力。在集液罐自转时,滚轮52表面的的橡胶层对集液罐施加阻力。设置两个稳定齿轮51啮合,用于使两个稳定板5对称转动,降低故障发生概率。设置若干滚轮52,用于实现上下可移动,自转不可移动。设置滚轮52的直径由中部相两端逐渐增大,用于增大接触面积。
如图5所示,包括:伸缩结构包括:第一套筒7,固定于降噪板8底部,第一套筒7下端固定有防旋环71,防旋环71内侧面上设置有若干齿轮状凸起,第一套筒7内设置有第二套筒75,第二套筒75下端与第一套筒7通过轴承转动连接,其轴线沿竖向设置,且内侧面上设置有第二内螺纹,第二套筒75的内径小于若干齿轮状凸起的内接圆内径,第二套筒75上端连接有第四电机,第四电机为正反转电机,固定于第一套筒7内侧面上;伸缩杆72,伸缩杆72上端依次穿过防旋环71、第一套筒7表面和第二套筒75表面处于第二套筒75内,伸缩杆72上端设置有第二外螺纹,第二外螺纹与第二内螺纹相适应,伸缩杆72中部表面与若干齿轮状凸起相适应,伸缩杆72下端贯穿密封盖6上部处于密封盖6内,与密封盖6通过轴承转动连接,伸缩杆72下部设置有连通空腔722,连通空腔722向下与密封盖6连通;软管74和负压管101的端口穿过伸缩杆72表面设置于连通空腔722内。
第四电机启动,使第二套杆转动,使伸缩杆72上下移动。设置防旋环71,与螺纹配合,使伸缩杆72上下移动。设置连通空腔722,用于防止软管74和负压管101的被带着转动,造成其断裂。
软管74和负压管101的端口相对设置;分隔板721,分隔板721竖向设置于连通空腔722内,位于软管74和负压管101之间,分隔板721面向软管74的一侧设置有纳米疏水涂层,面向负压管101的一侧设置有纳米亲水涂层;电动夹73,设置于伸缩杆72上,夹持于软管74上。
污液从软管74排出,被分隔板721阻挡,落到集液罐中。气流流入负压管101中,其中的液体被分隔板721上的纳米亲水涂层吸附,回落到集液罐中。若不设置分隔板721,污液中的杂质容易进入负压管101中造成堵塞。设置电动夹73,用于在更换集液罐时将软管74夹紧,防止软管74中的污液回流。
过滤装置包括:移动板10,设置于机体内,一侧连接有拉板,拉板设置于机体外侧,移动板10上设置有若干滚轮52;过滤盒102,过滤盒102为隔热材料,设置于移动板10上,过滤盒102的内部底面为倾斜面,沿气流方向由内到外向上倾斜,过滤盒102内设置有过滤网104,过滤网104与过滤盒102内侧面紧贴,过滤网104内侧设置有阻挡板103,阻挡板103上部与过滤盒102固定,阻挡板103内侧面上设置有纳米亲水涂层,阻挡板103下方设置有石灰粉105,石灰粉105位于过滤网104内侧;消毒瓶106,设置于移动板10上,位于过滤盒102侧方,通过管道与过滤盒102连通,消毒瓶106另一侧与气泵107连接,消毒瓶106内设置有消毒液;气泵107设置于移动板10上,气泵107的排气孔设置于外壳1下部,面向地面。
气流从负压管101流入过滤盒102中,从阻挡板103下方流过,被过滤网104过滤,之后进入消毒瓶106中,最后通过气泵107被排出到外界。当需要对过滤盒102和消毒瓶106进行清理和补充时,通过拉板和移动板10将过滤盒102和消毒瓶106拉到外界进行处理。由于气流中含有许多的病毒和细菌,因此需要进行消毒和过滤。设置石灰粉105,与气流中的水分发生化学反应生成强碱并放热,对细菌和病毒进行灭杀。设置过滤盒102的内部底面为倾斜面,用于将过滤网104过滤的水分和细菌病毒导向石灰粉105中。设置阻挡板103,用于对气流中的水分进行吸附,使气流经过石灰粉105表面,降低过滤网104的压力。设置消毒瓶106和消毒液,用于对气流进行消毒,且气流能够带着消毒液对外界环境进行消毒。设置气泵107的排气孔面向地面,用于将气流中多余的消毒液留在地面上。
本实施例的工作过程为:
启动气泵107,通过负压管101对第一集液罐9中的空气进行吸取,控制系统根据气压计108的数据实时调节气泵107的功率,使第一集液罐9中维持稳定的负压,然后控制红绿指示灯11亮红灯。医护人员通过软管74对病人的病变组织处的积液进行吸取,使污液从软管74排出,被分隔板721阻挡,落到集液罐中。气流流入负压管101中,其中的液体被分隔板721上的纳米亲水涂层吸附,回落到集液罐中。气流从负压管101流入过滤盒102中,从阻挡板103下方流过,被过滤网104过滤,之后进入消毒瓶106中,最后通过气泵107被排出到外界。第一集液罐9的重量增加,带动密封板向下移动,当第一集液罐9落到旋盘上时,被压力传感器感应到,此时,控制系统控制红绿指示灯11发红光,提醒医护人员医疗集液系统将要更换集液罐,并关闭气泵107。控制驱动齿轮61旋转,带动密封盖6旋转,使密封盖6向上移动,当压力传感器的数据稳定后,启动第四电机,使第二套杆转动,使伸缩杆72向上移动,使密封盖6与第一集液罐9的上端分离。控制旋转盘2转动,使相邻的第二集液罐91移动到密封盖6正下方,使第二套杆转动,使伸缩杆72向下移动,使密封盖6与第二集液罐91的上端口相接,控制驱动齿轮61转动,使密封盖6转动,通过螺纹将第二集液罐91密封,在第一弹簧的作用下使第二集液罐91向上移动,然后启动气泵107,通过负压管101使第二集液罐91形成稳定的负压,控制红绿指示灯11亮绿灯。红绿指示灯11亮绿灯表示可以使用,亮红灯表示不能使用。
若一次性处理的污液过多,超过了集液罐的数量,则需要人工进行更换。通过关门片压缩第三弹簧,将转动门4打开,此时开门感应器感应到信号,控制转动门4附近的电磁铁断电,外固定环31在弹簧的作用下上移,滑动固定环,使集液罐的外侧没有遮挡物,将集液罐平移出来。并换上新的集液罐,将集液罐的防旋凸起对准防旋槽32,放置于内固定环3内,滑动外固定环31,将集液罐包围,使推动板能够压在内固定环3上,能够使外固定环31更加稳定,关闭转动门4,此时开门感应器感应不到信号,控制电磁铁通电,使外固定环31下移固定,对集液罐进行固定。
启动第三电机,使两个稳定齿轮51共同转动,使两个稳定板5共同转动,实现对集液罐的夹持和放开。在集液罐上下移动时,使滚轮52转动,降低阻力。在集液罐自转时,滚轮52表面的的橡胶层对集液罐施加阻力。
当需要对过滤盒102和消毒瓶106进行清理和补充时,通过拉板和移动板10将过滤盒102和消毒瓶106拉到外界进行处理。
一种大健康智能医疗集液系统的控制方法,包括:当需要使用时,实行以下步骤:A1:控制系统启动气泵107,通过负压管101对第一集液罐9中的空气进行吸取,并根据气压计108的数据进行实时调节,直到气压达到工作气压,控制红绿指示灯11亮绿灯;A2:当第一集液罐9与压力感应接触时,控制红绿指示灯11亮红灯,并在5秒后控制电动夹73将软管74夹紧,关闭气泵107;通过第二电机控制驱动齿轮61旋转,带动密封盖6旋转,使密封盖6向上移动,当压力传感器的数据稳定后,通过第四电机控制伸缩杆72向上移动,使密封盖6与第一集液罐9分离;A3:通过第一电机使旋转盘2旋转,使相邻的第二集液罐91转动到密封盖6下方,通过第四电机控制伸缩杆72向下移动,使密封盖6盖压到第二集液罐91上;当压力传感器感应到后,通过第二电机控制驱动齿轮61旋转,使密封盖6与第二集液罐91通过螺纹固定,在第一弹簧的作用下,使第二集液罐91脱离旋转盘2;A4:启动气泵107,直到气压计108数据达到工作气压,控制红绿指示灯11亮绿灯。
在红绿指示灯11亮红灯时,延迟5秒,用于给医护人员反应时间。医护人员不需要时刻盯着集液瓶,只中注意红绿指示灯11,有利于维护医护人员的心理健康。
在医疗集液系统工作时对集液罐进行更换,实行以下步骤:B1:医护人员通过关门片打开转动门4,当开门感应器感应到开门后,控制系统断开靠近转动门4的电磁铁的电源,控制系统通过第三电机控制稳定齿轮51转动,使两个稳定板5与集液罐分离;B2:医护人员通过推动把36将外固定环31拨动到一边,将集液罐更换,然后通过推动把36将外固定环31拨动到前方;B3:将转动门4关上,当开门感应器无法感应到开门时,控制系统连接电磁铁的电源,使外固定环31向下移动,通过第三电机控制稳定齿轮51转动,使两个稳定板5与集液罐结合。
通过转动门4的开启和关闭控制电磁铁,实现智能化处理,有利于降低医护人员的工作强度。
上述实施例仅是本发明的一部分实施例,而不是全部实施例,基于本发明的实施例,本领域的技术人员在不付出创造性劳动的前提下所获得的其他实施例,均属于本发明保护的范围。
- 一种大健康智能医疗集液系统及控制方法
- 矩阵式集液单元阵列集液量自动巡检系统