无人机补给投送周转箱及投送周转方法
文献发布时间:2023-06-19 18:32:25
技术领域
本发明无人机补给投送周转箱及投送周转方法涉及无人机技术领域。
背景技术
无人机即无人驾驶飞机,是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机,无人机实际上是无人驾驶飞行器的统称,从技术角度定义可以分为:无人直升机、无人固定翼机、无人多旋翼飞行器、无人飞艇、无人伞翼机这几大类,无人机,机上无驾驶舱,但安装有自动驾驶仪、程序控制装置等设备,地面、舰艇上或母机遥控站人员通过雷达等设备,对其进行跟踪、定位、遥控、遥测和数字传输。
无人机种类较多,包括多功能无人机、人工智能无人机、预警无人机、微型无人机、测绘无人机、航拍无人机和运输无人机等几种,其中运输无人机主要是用于物资的投送,可采用装载方式进行储存,也存在无人机体型较小,通常采用吊运投送的方式,此时需要使用周转箱进行物资的转运工作。
目前,已经出现了可应用于无人机的周转箱技术,例如申请号201621484885.8 的实用新型专利《一种带显示屏的周转箱》,结构简单,能够即时发送地理位置,便于追踪包裹动态,同时能够在箱子途中被人打开时警报并发送警报信息,功能强大,安全性能强,并且能够降低包裹筛选甄别的繁杂程度,一定程度上实现点对点运输,提高私密性。
但是,这项技术还存在使用不便的问题,且周转箱内物资较重时不利于快速取出,在进行救灾等投送物资时,周转箱开启不便,降低应急投运工作效率。现在尚没有一种结构合理可靠以及使用方便的用于无人机补给投送的智能周转箱。
发明内容
为了解决现有技术的不足,本申请公开了一种无人机补给投送周转箱及投送周转方法,不仅能够解决物资较重时不利于快速取放的问题,提高周转箱的实用性,而且避免周转箱冲击地面而损坏,同时可以监测周转箱周围画面,提高周转箱的智能性的同时,提高操作便利性。
本发明的目的是这样实现的:
无人机补给投送周转箱,包括:底板、侧板、固定板、插接板、顶板、缓冲板和隔板;所述底板边缘与侧板转动连接,所述底板顶部固定安装有固定板,所述侧板和固定板之间设有插接板,且所述插接板顶部固定安装有顶板,所述固定板内壁固定安装有隔板,所述隔板底部设有双轴电机,所述双轴电机输出端固定连接有驱动轴,所述驱动轴分别与收卷轮和固定齿轮固定连接,所述收卷轮表面设有拉绳,且所述固定齿轮与卡杆啮合连接;所述底板底部设有缓冲板,所述缓冲板顶部固定安装有活动杆,所述活动杆顶端与限位块固定连接,所述限位块内部嵌合安装有控制开关,所述控制开关通过所述驱动电机与控制器电性连接,所述控制器固定安装至隔板底部,所述底板底部通过缓冲弹簧与缓冲板连接。
进一步地,所述底板边缘设有四个侧板,每个所述侧板边缘相互接触,每个所述侧板都与底板铰接,所述侧板内壁与插接板贴合连接,所述插接板底端接触底板,所述侧板的高度大于固定板的高度,所述固定板外壁与插接板贴合连接。
进一步地,所述侧板顶部均开设有卡槽,所述插接板顶部固定安装有卡板,所述卡板截面为L形结构,所述卡板与卡槽内部插接。
进一步地,所述底板顶部设有水平分布的隔板,所述隔板顶部固定安装有壳体,所述壳体与插接板内壁贴合连接,所述壳体与固定板顶部固定安装,所述壳体内部设有腔体,所述腔体内部分别设有导向轮和拉绳,所述导向轮与固定板顶部转动连接,所述导向轮表面设有拉绳,且所述拉绳与隔板边缘贯穿插接。
进一步地,所述底板顶部分别固定安装有双轴电机和控制器,所述双轴电机的数量为两个,两个所述双轴电机对称分布至固定板内部两侧,所述固定板为方形空心结构,且所述固定板与四个驱动轴转动连接。
进一步地,所述驱动轴两端对称分布有两个固定齿轮和收卷轮,其中两个所述驱动轴一端都固定安装有端面齿轮,另外两个所述驱动轴一端都固定连接有传动齿轮,所述端面齿轮与传动齿轮啮合连接。
进一步地,所述插接板底部开设有开口,所述开口内部设有拉绳,所述拉绳一端与侧板内壁固定连接,所述插接板底部开设有两个对称分布的插口,所述插口内部与卡杆嵌合卡接,所述卡杆与固定板内部贯穿插接,且所述卡杆一端延伸至固定板内侧并与固定齿轮连接。
进一步地,所述缓冲板顶部设有四个均匀分布的活动杆,每个所述活动杆都与底板贯穿插接,所述活动杆截面积小于限位块面积,所述限位块与隔板底部贴合连接,且所述隔板与控制开关接触,四个所述限位块均匀分布至控制器四周,所述底板和缓冲板之间设有若干个均匀分布的缓冲弹簧。
进一步地,所述顶板边缘设有方形空心结构的插接板,所述顶板边缘与侧板顶部内壁贴合连接,所述顶板顶部分别固定安装有控制面板,吊环,把手和摄像头,所述吊环和把手的数量都为两个,每个所述把手和吊环均位于顶板边缘,用于取下顶板和插接板和用于无人机吊运,所述摄像头通过控制面板与控制器电性连接,所述摄像头的数量为四个,四个所述摄像头分别位于顶板四周。
无人机补给投送智能周转方法,整个用于无人机补给投送的智能周转箱采用底板、侧板、插接板和顶板的配合实现无人机补给物资的投送,在投送后能够通过缓冲板起到缓冲功能,使得周转箱能够通过运输或吊运方式进行投送,在采用吊运方式时缓冲板先接触地面,使其带动活动杆在底板处移动,并带动限位块接触隔板,此时控制开关接触隔板,通过控制开关接通电路并通过控制器控制双轴电机转动,缓冲板移动过程中,使缓冲弹簧压缩,进而起到缓冲减震作用,避免周转箱出现损坏问题,通过摄像头进行周转箱周围环境的监测,能够对画面信息进行传输,并通过双轴电机带动驱动轴转动时,带动收卷轮和固定齿轮同步转动,固定齿轮带动卡杆移动使其与插接板处的插口内部分离,而收卷轮转动时带动拉绳松开,此时侧板向外打开,侧板围绕底板边缘旋转的同时,卡槽与卡板分离,使侧板完全打开后,通过把手将顶板和插接板取下实现物资的取出;
在进行装运物资时,能够将物资存放在固定板的隔板处,实现物资存放,方便较重物资的放置,解决周转箱高度较高而不利于物资存放的问题,将物资存放后,将插接板和顶板放置后,通过控制面板控制双轴电机反向转动,使其带动卡杆在固定板内部移动后重新与插接板卡接,同时侧板转动后将顶板围起,此时卡板移动至卡槽内部,通过吊环进行吊运时,顶板和插接板移动时,通过卡板接触侧板,以及卡杆接触插接板实现底板的同时移动,进而实现存放有物资的周转箱的移动。
有益效果:
第一、本发明无人机补给投送周转箱,采用周转箱实现无人机补给投送的物资进行储存,采用底板和侧板的配合能够方便周转箱的打开,并通过插接板和顶板的设置方便周转箱的取下,有利于物资的取放,解决物资较重时不利于快速取放的问题,提高周转箱的实用性;
第二、本发明无人机补给投送周转箱,具有限位功能,能够在物资存放后对插接板进行限位实现稳定固定,并采用卡杆和卡板的共同配合能够进一步提高稳定性,方便进行周转箱的投运,且可实现周转箱的缓冲性能,避免周转箱冲击地面而造成损坏问题;
第三、本发明无人机补给投送周转箱,具有便捷开启功能,通过设置摄像头可实现周转箱周围画面监测,能够通过远程定位和传输实现周转箱的开启,提高周转箱的智能性的同时,能够利用双轴电机控制侧板的开闭,有利于提高操作便利性。
附图说明
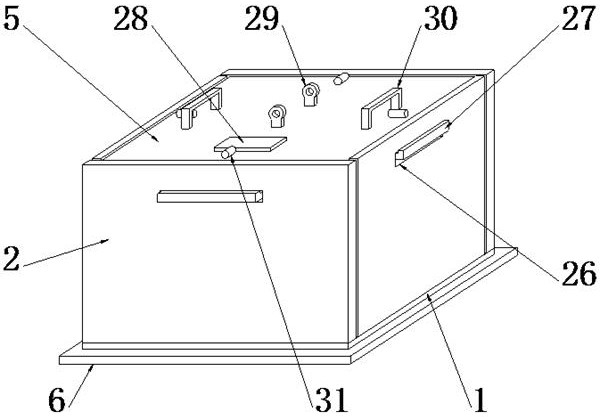
图1是本发明无人机补给投送周转箱的结构示意图;
图2是本发明无人机补给投送周转箱第一视角结构示意图;
图3是图2中A处局部放大结构示意图;
图4是底板处俯视结构示意图;
图5是顶板处俯视结构示意图;
图6是双轴电机处立体结构示意图;
图7是隔板处俯视结构示意图;
图8是插接板处立体结构示意图;
图9是固定板处立体结构示意图;
图10是底板处立体结构示意图。
图中:1、底板,2、侧板,3、固定板,4、插接板,5、顶板,6、缓冲板,7、活动杆,8、限位块,9、控制开关,10、隔板,11、双轴电机,12、驱动轴,13、收卷轮,14、拉绳,15、固定齿轮,16、卡杆,17、端面齿轮,18、传动齿轮,19、开口,20、壳体,21、腔体,22、导向轮,23、插口,24、控制器,25、缓冲弹簧,26、卡槽,27、卡板,28、控制面板,29、吊环,30、把手,31、摄像头。
具体实施方式
下面将结合附图对本发明具体实施方式作进一步详细描述。
具体实施方式一
以下是本发明用于无人机补给投送的智能周转箱的具体实施方式。
该具体实施方式下的用于无人机补给投送的智能周转箱,参照图1至图10,包括:底板1、侧板2、固定板3、插接板4、顶板5、缓冲板6和隔板10。
作为优选方案,所述底板1边缘与侧板2转动连接,所述底板1顶部固定安装有固定板3,侧板2能够围绕底板1旋转,方便在取放物资时将侧板2打开,方便对不利于搬运的较重的物资进行存放,提高操作便利性,所述侧板2和固定板3之间设有插接板4,且所述插接板4顶部固定安装有顶板5,在物资存放完成后,只需将插接板4和顶板5安装完成后,通过吊运顶板5即可实现周转箱的搬运,所述固定板3内壁固定安装有隔板10,所述隔板10底部设有双轴电机11,所述双轴电机11输出端固定连接有驱动轴12,所述驱动轴12分别与收卷轮13和固定齿轮15固定连接,所述收卷轮13表面设有拉绳14,且所述固定齿轮15与卡杆16啮合连接,隔板10用于对物资进行支撑,通过固定板3对存放物资进行限位,方便后续插接板4的安装,双轴电机11能够带动驱动轴12在固定板3内部转动,并带动收卷轮13和固定齿轮15同时转动,固定齿轮15能够带动卡杆16移动实现与插接板4的限位,保证插接板4安装稳定性以避免投送过程中出现脱落问题,同时收卷轮13可带动拉绳14移动,通过拉绳14拉动侧板2实现侧板2的打开或关闭,提高周转箱的智能性。
参照图2至图4以及图10,作为具体方案,所述底板1底部设有缓冲板6,所述缓冲板6顶部固定安装有活动杆7,所述活动杆7顶端与限位块8固定连接,所述限位块8内部嵌合安装有控制开关9,所述控制开关9通过所述驱动电机与控制器24电性连接,所述控制器24固定安装至隔板10底部,所述底板1底部通过缓冲弹簧25与缓冲板6连接,缓冲板6用于提高周转箱的缓冲性能,在周转箱放下时,缓冲板6先接触地面,使缓冲板6带动活动杆7和限位块8移动,此时缓冲弹簧25压缩进而起到缓冲减震性能,同时限位块8接触隔板10,此时控制开关9接触隔板10,进而控制双轴电机11动作将侧板2打开,人员进行物资拿取时,通过摄像头31监测画面的同时,只需将插接板4和顶板5取出实现物资的拿取。
参照图1至图5以及图7,作为扩展方案,所述底板1边缘设有四个侧板2,每个所述侧板2边缘相互接触,每个所述侧板2都与底板1铰接,所述侧板2内壁与插接板4贴合连接,所述插接板4底端接触底板1,所述侧板2的高度大于固定板3的高度,所述固定板3外壁与插接板4贴合连接,插接板4可实现周转箱的安装,实现周转箱的整体性,同时采用固定板3进行物资的存放,能够方便物资的摆放并降低搬运难题,尤其适用于物资重量较重时的搬运工作,在放置完成后,可通过插接板4的安装对物资进行储存保护,再通过侧板2的转动实现插接板4的限位,方便进行周装箱的整体转移。
参照图1至图2以及图7,采用这样的方案,所述侧板2顶部均开设有卡槽26,所述插接板4顶部固定安装有卡板27,所述卡板27截面为L形结构,所述卡板27与卡槽26内部插接,侧板2在转动至竖直方向后,此时卡槽26正好移动至卡板27处,实现四个侧板2的关闭,在向上移动插接板4和顶板5时,卡板27的L形结构可实现与侧板2位置的卡接,进而避免投运过程中侧板2打开,保证周转箱的稳定性,同时卡板27可作为手柄进行抬运,提高周转箱的实用性。
参照图2至图3以及图7和图9,作为扩展方案,所述底板1顶部设有水平分布的隔板10,所述隔板10顶部固定安装有壳体20,所述壳体20与插接板4内壁贴合连接,所述壳体20与固定板3顶部固定安装,所述壳体20内部设有腔体21,所述腔体21内部分别设有导向轮22和拉绳14,所述导向轮22与固定板3顶部转动连接,所述导向轮22表面设有拉绳14,且所述拉绳14与隔板10边缘贯穿插接,隔板10用于物资的支撑,同时能够对限位块8进行限位,使其接触隔板10后停止缓冲板6的移动,设置有壳体20可实现导向轮22和拉绳14在其内部的腔体21内转动以及拉绳14的移动,避免对物资造成损坏。
参照图2至图4以及图6,采用这样的方案,所述底板1顶部分别固定安装有双轴电机11和控制器24,所述双轴电机11的数量为两个,两个所述双轴电机11对称分布至固定板3内部两侧,所述固定板3为方形空心结构,且所述固定板3与四个驱动轴12转动连接,双轴电机11能够带动驱动轴12在固定板3内部转动,同时通过端面齿轮17和传动齿轮18的传动实现四个驱动轴12的同步转动。
参照图2至图4以及图6,采用这样的方案,所述驱动轴12两端对称分布有两个固定齿轮15和收卷轮13,其中两个所述驱动轴12一端都固定安装有端面齿轮17,另外两个所述驱动轴12一端都固定连接有传动齿轮18,所述端面齿轮17与传动齿轮18啮合连接,每个驱动轴12两端均设有有固定齿轮15和收卷轮13,能够拉动侧板2稳定转动,同时实现多个卡杆16的移动对插接板4进行限位,双轴电机11带动驱动轴12转动时,带动端面齿轮17同时转动,通过传动齿轮18的啮合能够带动另一个驱动轴12同步转动,进而实现四个侧板2的同时打开或关闭。
参照图2至图3以及图8,作为扩展方案,所述插接板4底部开设有开口19,所述开口19内部设有拉绳14,所述拉绳14一端与侧板2内壁固定连接,所述插接板4底部开设有两个对称分布的插口23,所述插口23内部与卡杆16嵌合卡接,所述卡杆16与固定板3内部贯穿插接,且所述卡杆16一端延伸至固定板3内侧并与固定齿轮15连接,插接板4在安装时,使拉绳14移动至开口19内部,方便插接板4的安装,驱动轴12转动时带动卡杆16移动至插口23内部进行限位,拉动插接板4移动时,可实现卡杆16在插口23内部微量移动并接触插口23的底部,实现周转箱的抬起。
参照图2至图4以及图10,作为扩展方案,所述缓冲板6顶部设有四个均匀分布的活动杆7,每个所述活动杆7都与底板1贯穿插接,所述活动杆7截面积小于限位块8面积,所述限位块8与隔板10底部贴合连接,且所述隔板10与控制开关9接触,四个所述限位块8均匀分布至控制器24四周,所述底板1和缓冲板6之间设有若干个均匀分布的缓冲弹簧25,活动杆7能够在底板1内部稳定移动,使其带动限位块8接触隔板10底面,同时缓冲弹簧25压缩起到缓冲性能,在抬起时,缓冲弹簧25带动底板1移动时,使限位块8接触底板1表面对缓冲板6的位置进行限位,控制开关9接触隔板10底部时能够使线路接通,此时通过控制器24控制双轴电机11转动,使拉绳14从收卷轮13表面松开以实现侧板2的打开。
参照图1至图2以及图5,作为具体方案,所述顶板5边缘设有方形空心结构的插接板4,所述顶板5边缘与侧板2顶部内壁贴合连接,所述顶板5顶部分别固定安装有控制面板28,吊环29,把手30和摄像头31,所述吊环29和把手30的数量都为两个,每个所述把手30和吊环29均位于顶板5边缘,用于取下顶板5和插接板4和用于无人机吊运,把手30用于插接板4和顶板5的打开,方便进行周转箱拆卸,并设置有吊环29可实现周转箱的吊运,提高周转箱的实用性,所述摄像头31通过控制面板28与控制器24电性连接,所述摄像头31的数量为四个,四个所述摄像头31分别位于顶板5四周,摄像头31用于监测周围环境,可实现图像信息的传送,能够对物资投运情况进行监测,控制面板28能够控制控制器24进行双轴电机11的工作,使物资储存完成后,通过控制面板28进行侧板2关闭的操作。
具体实施方式二
以下是本发明用于无人机补给投送的智能周转方法的具体实施方式。
该具体实施方式下的无人机补给投送智能周转方法,整个用于无人机补给投送的智能周转箱采用底板1、侧板2、插接板4和顶板5的配合实现无人机补给物资的投送,在投送后能够通过缓冲板6起到缓冲功能,使得周转箱能够通过运输或吊运方式进行投送,在采用吊运方式时缓冲板6先接触地面,使其带动活动杆7在底板1处移动,并带动限位块8接触隔板10,此时控制开关9接触隔板10,通过控制开关9接通电路并通过控制器24控制双轴电机11转动,缓冲板6移动过程中,使缓冲弹簧25压缩,进而起到缓冲减震作用,避免周转箱出现损坏问题,通过摄像头31进行周转箱周围环境的监测,能够对画面信息进行传输,并通过双轴电机11带动驱动轴12转动时,带动收卷轮13和固定齿轮15同步转动,固定齿轮15带动卡杆16移动使其与插接板4处的插口23内部分离,而收卷轮13转动时带动拉绳14松开,此时侧板2向外打开,侧板2围绕底板1边缘旋转的同时,卡槽26与卡板27分离,使侧板2完全打开后,通过把手30将顶板5和插接板4取下实现物资的取出;
在进行装运物资时,能够将物资存放在固定板3的隔板10处,实现物资存放,方便较重物资的放置,解决周转箱高度较高而不利于物资存放的问题,将物资存放后,将插接板4和顶板5放置后,通过控制面板28控制双轴电机11反向转动,使其带动卡杆16在固定板3内部移动后重新与插接板4卡接,同时侧板2转动后将顶板5围起,此时卡板27移动至卡槽26内部,通过吊环29进行吊运时,顶板5和插接板4移动时,通过卡板27接触侧板2,以及卡杆16接触插接板4实现底板1的同时移动,进而实现存放有物资的周转箱的移动。
以上仅为本申请的具体实施方式而已,并不用于限制本申请,对于本领域的技术人员来说,本申请可以有各种更改和变化。凡在本申请的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本申请的保护范围之内。
- 快递及物品投送智能周转箱
- 快递及物品投送智能周转箱