一种脊柱的培养液的半循环装置、方法及加载系统
文献发布时间:2023-06-19 18:34:06
技术领域
本发明涉及医疗设备技术领域,尤其涉及一种脊柱的培养液的半循环装置、方法及加载系统。
背景技术
力学载荷对于维持骨骼的结构和功能至关重要。骨组织对其所处力学环境具有适应性,当骨组织所受力学载荷降低时,发生骨质流失,骨组织结构强度降低,从而使骨骼整体力学性能下降。
相关技术中,通常以脊柱为研究对象来进行力学特性的研究,即将脊柱容置于充满培养液的培养皿中,并对离体培养的脊柱施加外力,以研究外力对椎间盘组织的影响。上述方案需要工作人员手持注射器将培养液从储存容器中抽出,然后将注射器中的培养液由培养皿的培养液注入口注入到培养皿中,实验完成后再利用注射器将培养液从培养皿中抽出。显然,该方案在对培养液转移的过程中可能造成培养液的污染。
基于此,目前亟待需要一种脊柱的培养液的半循环装置、方法及加载系统来解决上述技术问题。
发明内容
本发明提供了一种脊柱的培养液的半循环装置、方法及加载系统,能够避免在对培养液转移的过程中造成培养液的污染。
第一方面,本发明实施例提供了一种脊柱的培养液的半循环装置,包括:
培养箱,内部收容有脊柱的力加载机构,所述力加载机构用于对所述脊柱施加力载荷,所述力加载机构设置有具有开口的培养皿,所述培养皿用于收容所述脊柱,所述培养箱用于提供恒温和恒湿的环境;
保存箱,内部收容有用于盛装培养液的储存容器,所述保存箱用于提供所述培养液的保存温度的环境;
进液泵,两端通过管路分别与所述储存容器和所述培养皿连通,用于将所述储存容器中的培养液输送到所述培养皿中;
出液泵,两端通过管路分别与所述培养皿的底部和外部的废液箱连通,用于将所述培养皿中的培养液输送到所述废液箱中。
第二方面,本发明实施例提供了一种脊柱的培养液的半循环方法,基于上述任一项实施例所述的脊柱的培养液的半循环装置,所述方法包括:
在所述力加载机构对所述脊柱施加力载荷前,通过所述进液泵将所述储存容器中的培养液输送到所述培养皿中;
在完成对所述脊柱的力学实验后,通过所述出液泵将所述培养皿中的培养液输送到所述废液箱中。
第三方面,本发明实施例提供了一种脊柱的加载系统,包括上述任一项实施例所述的脊柱的培养液的半循环装置。
由上述方案可知,本发明提供的脊柱的培养液的半循环装置通过设置培养箱、保存箱、进液泵和出液泵,这样就可以在力加载机构对脊柱施加力载荷前,利用进液泵将位于保存箱内的储存容器中的培养液输送到位于培养箱内的培养皿中,以及在完成对脊柱的力学实验后,利用出液泵将培养皿中的培养液输送到外部的废液箱中,如此可以避免在对培养液转移的过程中造成培养液的污染。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以基于这些附图获得其它的附图。
图1为本发明一个实施例提供的脊柱的培养液的半循环装置和力加载机构的结构示意图;
图2为本发明一个实施例提供的培养皿的一种结构示意图;
图3为本发明一个实施例提供的培养皿的另一种结构示意图;
图4为本发明一个实施例提供的力加载机构的结构示意图;
图5为图4中A处的放大示意图;
图6为图4所示力加载机构的主视图;
图7为图6中B处的放大示意图;
图8为图4所示力加载机构的剖面示意图;
图9为图8中C处的放大示意图;
图10为图8中D处的放大示意图。
附图标记:
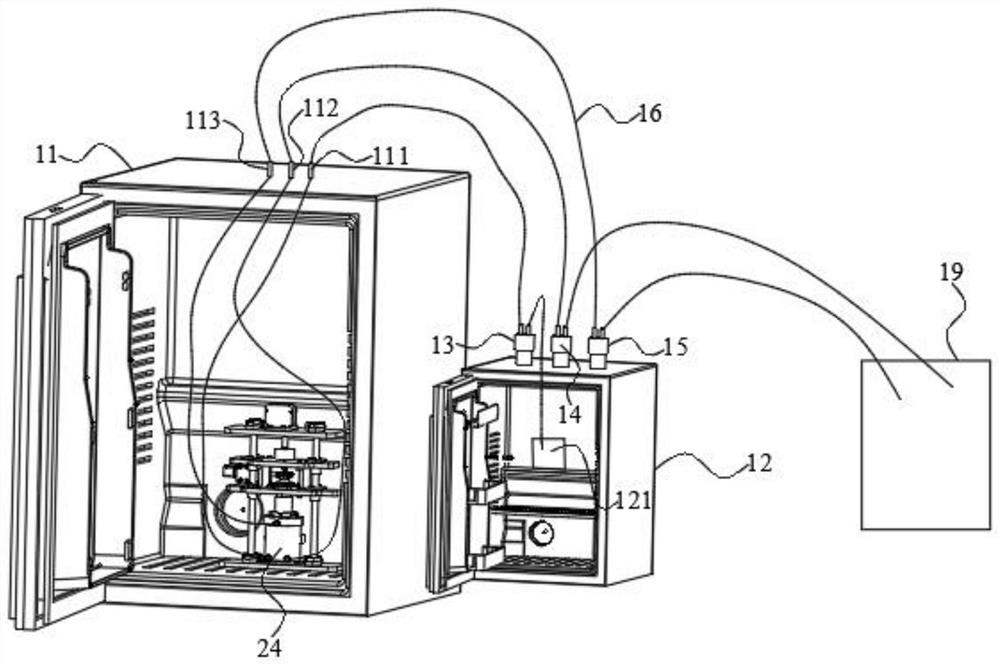
11-培养箱;12-保存箱;13-进液泵;14-出液泵;15-防溢泵;16-管路;19-废液箱;111-进液接口;112-出液接口;113-防溢接口;121-储存容器;
21-框体;22-轴向加载机构;23-周向加载机构;24-培养皿;25-第一安装座;26-第二安装座;27-安装槽;211-导柱;212-第一平板;
213-第二平板;214-第三平板;215-第四平板;216-第五平板;221-第一输出轴;222-第一连接件;223-第一力传感器;231-第二输出轴;
232-旋转组件;233-连接组件;232a-旋转轴;232b-固定座;232c-轴承;
233a-第二连接件;233b-第三连接件;233c-第四连接件;241-进液口;
242-出液口;243-防溢口;244-防溅盖;245-骨水泥注入口;246-压板;
247-O型圈;248-硅胶垫;249-固定台。
具体实施方式
为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例,基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动的前提下所获得的所有其它实施例,都属于本发明保护的范围。
请参阅图1,本发明实施例提供了一种脊柱的培养液的半循环装置,该装置包括培养箱11、保存箱12、进液泵13和出液泵14,其中:
培养箱11的内部收容有脊柱的力加载机构,力加载机构用于对脊柱施加力载荷,力加载机构设置有具有开口的培养皿24,培养皿24用于收容脊柱,培养箱11用于提供恒温和恒湿的环境;
保存箱12的内部收容有用于盛装培养液的储存容器121,保存箱12用于提供培养液的保存温度的环境;
进液泵13的两端通过管路16分别与储存容器121和培养皿24连通,用于将储存容器121中的培养液输送到培养皿24中;
出液泵14的两端通过管路16分别与培养皿24的底部和外部的废液箱19连通,用于将培养皿24中的培养液输送到废液箱19中。
在本实施例中,通过设置培养箱11、保存箱12、进液泵13和出液泵14,这样就可以在力加载机构对脊柱施加力载荷前,利用进液泵13将位于保存箱12内的储存容器121中的培养液输送到位于培养箱11内的培养皿24中,以及在完成对脊柱的力学实验后,利用出液泵14将培养皿24中的培养液输送到外部的废液箱19中,如此可以避免在对培养液转移的过程中造成培养液的污染。
可以理解的是,对离体脊柱的加载实验的环境越接近实际情况,得到的力学数据越接近在体脊柱的真实力学数据,因此需要将力加载机构设置在能够恒温和恒湿的环境的培养箱11中。同理,培养液也需要处于一定的温度环境(例如4℃),因此需要将储存容器121设置在能够提供培养液保存温度的环境的保存箱12中。在一些实施方式中,保存箱12可以是冰箱,在此不进行限定。
为了建立储存容器121和培养皿24的交换通道,可以设置管路16;为了保证培养液的输送动力,可以设置进液泵13和出液泵14,即在力加载机构对脊柱施加力载荷前,利用进液泵13将位于保存箱12内的储存容器121中的培养液输送到位于培养箱11内的培养皿24中,以及在完成对脊柱的力学实验后,利用出液泵14将培养皿24中的培养液输送到外部的废液箱19中。由此可知,本发明实施例提供的半循环装置的培养液只能利用一个力学实验(例如可以是8h的力学实验),在力学实验后,培养皿24的培养液便不能再继续使用,否则会影响离体脊柱的力学数据。
在本发明一个实施例中,培养箱11中通有二氧化碳气体,如此可以使得培养箱11的环境更加符合在体脊柱的真实存活环境。
在本发明一个实施例中,培养皿24的开口设置有防溅盖244(可参见图4),防溅盖244采用对半式设计。
在本实施例中,由于培养液在进入培养皿24的过程中,可能会产生气泡,气泡上升到培养液的液面处发生爆破,一部分培养液可能从培养皿24的开口溅出培养皿24,这会对培养皿24所处的外部环境造成污染,因此可以考虑在开口处设置防溅盖244,而进一步考虑到防溅盖244的易安装,使得防溅盖244采用对半式设计。
在本发明一个实施例中,培养皿24的侧壁设置有骨水泥注入口245,骨水泥注入口245用于使骨水泥注入到培养皿24中的固定脊柱的位置,以对脊柱进行固定。
在本实施例中,通过培养皿24周身上设置的骨水泥注入口245注入骨水泥,可以有效固定脊柱。本发明实施例不再采用相关技术中的螺纹紧固件,而是采用骨水泥的固定方式,这样不会导致螺纹紧固件对培养液的污染。
请参阅图8,第一安装座25和第二安装座26内均设置有用于容纳脊柱的安装槽27,安装槽27内用于填充骨水泥,脊柱的上端和下端分别通过嵌入骨水泥的方式(即通过培养皿24周身上设置的骨水泥注入口245注入骨水泥)固定于第一安装座25和第二安装座26。可以理解的是,第一安装座25和第二安装座26均可以采用PP材料制成,这样均不会污染培养液。进一步地,用于固定第二安装座26的紧固件可以采用钛合金,如此也不会污染培养液。
请参阅图10,在本发明一个实施例中,为了方便第二安装座26的更换,可以考虑在培养皿24内的底部设置压板246,压板246可以通过紧固件穿过培养皿24底部开设的通孔(可参见图3)与固定台249固定;为了进一步保证培养液不会从培养皿24底部开设的通孔漏出,可以考虑在压板246的底部设置O型圈247。
在本发明一个实施例中,半循环装置还包括:
防溢泵15,两端通过管路16分别与培养皿24的顶部和废液箱19连通,用于将达到培养皿24的预设高度的培养液输送到废液箱19中;
响应于防溢泵15将培养液输送到废液箱19中,控制进液泵13和防溢泵15停止工作。
在本实施例中,通过设置防溢泵15,可以保证培养液不会从培养皿24中溢出,从而既能够保证培养箱11不被污染,又能够保证培养皿24中的培养液的液位处于预设高度,以利于进行离体脊柱的培养。
在本发明一个实施例中,培养箱11的顶部设置有进液接口111、出液接口112和防溢接口113,进液泵13与培养皿24连通的管路16经过进液接口111,出液泵14与培养皿24连通的管路16经过出液接口112,防溢泵15与培养皿24连通的管路16经过防溢接口113。
在本实施例中,通过在培养箱11的顶部设置进液接口111、出液接口112和防溢接口113,有利于方便管路16的拆装。
当然,也可以不设置进液接口111、出液接口112和防溢接口113,在此不进行限定。
在本发明另一个实施例中,半循环装置还包括:
液位传感器(图中未示出),设置于培养皿24的顶部;
控制机构(图中未示出),分别与进液泵13和液位传感器电连接,用于在培养皿24中的培养液的液位到达预设高度时,控制进液泵13停止工作。
在本实施例中,除了防溢泵15可以实现在培养皿24中液位的监测,还可以通过在培养皿24中设置液位传感器的方式来实现对培养皿24中液位的监测。
需要说明的是,如果培养皿24的尺寸较小,液位传感器很难设置于培养皿24的顶部,因此采用防溢泵15进行间接测量在培养皿24中的培养液的液位到达预设高度的方式更加有效合理。
请参阅图2和3,脊柱的培养液的半循环装置用于对设置于力加载机构的培养皿24进行培养液的循环,以避免相关技术采用注射器可能污染培养液的问题。其中,在利用脊柱的培养液的半循环装置对培养皿24进行培养液的循环时,可以利用进液泵13将位于储存容器121中的培养液输送到培养皿24的进液口241中,同时利用出液泵14将培养皿24中的培养液通过出液口242输送到外部的废液箱19,还可以利用防溢泵15将达到培养皿24的预设高度的培养液通过防溢口243输送到外部的废液箱19。在一些实施方式中,进液口241和出液口242位于培养皿24的底部,防溢口243位于培养皿24的顶部。
请参阅图10,在本发明一个实施例中,培养皿24设置于固定台249上,固定台249固定于第四平板215上,如此方便固定台249的清洗。由于培养皿24通常采用玻璃制成,为了防止轴向加载装置对脊柱进行轴向加载时,可能会造成培养皿24的底部发生破碎,在一些实施方式中,可以在培养皿24和固定台249的底部设置硅胶垫248。
此外,本发明一个实施例还提供了一种脊柱的培养液的半循环方法,基于上述任一项实施例提及的脊柱的培养液的半循环装置,该方法包括:
在力加载机构对脊柱施加力载荷前,通过进液泵13将储存容器121中的培养液输送到培养皿24中;
在完成对脊柱的力学实验后,通过出液泵14将培养皿24中的培养液输送到废液箱19中。
需要说明的是,该方法与上述实施例中的脊柱的培养液的半循环装置是基于相同的发明构思实现的,因此二者具有相同的有益效果,在此对使用方法的有益效果不进行赘述。
在本发明一个实施例中,步骤“通过进液泵13将储存容器121中的培养液输送到培养皿24中”具体可以包括:
控制防溢泵15开始工作;
控制进液泵13开始工作,以将储存容器121中的培养液输送到培养皿24中;
响应于防溢泵15将培养液输送到废液箱19中,控制进液泵13和防溢泵15停止工作。
在本实施例中,防溢泵15在进液泵13打开之前就处于工作状态或与进液泵13同时处于工作状态,这样当进液泵13将储存容器121中的培养液输送到培养皿24中后,且在培养皿24中的培养液的液位到达预设高度后,防溢泵15就可以将培养液输送到废液箱19中,此时就可以控制进液泵13和防溢泵15停止工作,即完成了培养液从储存容器121到培养皿24的供给。
此外,本发明一个实施例还提供了一种脊柱的加载系统,包括上述任一项实施例提及的脊柱的培养液的半循环装置。
需要说明的是,该系统与上述实施例中的脊柱的培养液的半循环装置是基于相同的发明构思实现的,因此二者具有相同的有益效果,在此对使用方法的有益效果不进行赘述。
在本发明一个实施例中,脊柱的加载系统包括脊柱的培养液的半循环装置和力加载机构(即双向加载装置,其中双向分别为轴向和周向)。
下面结合附图对力加载机构进行介绍。
请参阅图4、6和8,脊柱的力加载机构包括脊柱的轴向加载装置和周向加载装置,其中,轴向加载装置和周向加载装置共用力加载机构的框体21部分。
在本发明一个实施例中,该脊柱的力加载机构包括框体21、轴向加载机构22和周向加载机构23,其中:
框体21包括沿脊柱的轴向延伸的两个导柱211以及沿脊柱的轴向由上至下依次设置的第一平板212、第二平板213、第三平板214和第四平板215,第一平板212和第四平板215均与导柱211固定,第二平板213和第三平板214固定连接,第二平板213和第三平板214均可共同沿导柱211向上或向下移动;
轴向加载机构22固定于第一平板212上;
周向加载机构23设置于第二平板213和第三平板214之间;
框体21设置有具有开口的培养皿24,培养皿24用于收容脊柱,脊柱的上端和下端分别固定于第一安装座25和第二安装座26,第一安装座25与第三平板214转动连接,第一安装座25可产生沿脊柱的周向的转动,第二安装座26与第四平板215固定;
轴向加载机构22用于对第一安装座25施加沿脊柱的轴向的作用力,以对脊柱进行轴向加载;
周向加载机构23用于对第一安装座25施加沿脊柱的周向的作用力,以对脊柱进行周向加载。
在本实施例中,通过在第一平板212上设置轴向加载机构22,可以实现对第一安装座25施加沿脊柱的轴向的作用力,以对脊柱进行轴向加载;通过在第二平板213和第三平板214之间设置周向加载机构23,可以实现对第一安装座25施加沿脊柱的周向的作用力,以对脊柱进行周向加载。因此,上述方案可以实现对脊柱的整体力学特性的研究。
相关技术中,通常以脊柱为研究对象来进行力学特性的研究。例如,公开号为CN113057595A的专利公开了一种脊柱运动节段在体加载装置,该方案通过压缩弹簧来对脊柱进行轴向加载。再例如,公开号为CN214572028U的专利公开了一种可调节角度的脊柱运动节段的离体培养加载装置,该方案模拟颈椎运动单元的自然屈伸角度,研究不同屈伸角度不同作用力(即侧向加载)对颈椎间盘的影响。
对于患有腰椎疾病的患者而言,坐位腰椎旋转复位法(可参见公开号为CN204033550U的专利)是常用的中医治疗方法之一。即坐位腰椎旋转复位法要求患者坐于座椅上,医生坐于患者后侧的另一座椅上,并由一助手固定患者下肢,医生和助手协同共同完成本手法的操作。针对这种场景,上述相关技术显然无法研究脊柱在不同旋转作用力(即周向加载)下的变化。
然而,本发明提供的技术方案通过在框体21上设置周向加载机构23,可以实现对第一安装座25施加沿脊柱的周向的作用力,以对脊柱进行周向加载,从而能够研究脊柱在不同旋转作用力载荷下的变化。
在本发明一个实施例中,第二平板213和第三平板214之间固定有两个第五平板216,第五平板216与第二平板213或第三平板214垂直,周向加载机构23固定于其中一个第五平板216。
在本实施例中,通过在第二平板213和第三平板214之间固定两个第五平板216,不仅可以实现第二平板213和第三平板214的固定连接,还可以保证第二平板213和第三平板214沿导柱211上下移动的稳定性。当然,也可以通过其它方式实现第二平板213和第三平板214的固定连接,在此不进行限定。
需要说明的是,设置第二平板213和第三平板214是为了安装周向加载机构23,如果仅考虑对脊柱的轴向加载,第二平板213可以省略,即轴向加载机构22的第一输出轴221可以与第三平板214直接连接,以实现对第三平板214的压缩和拉伸。
此外,沿高度方向,轴向加载机构22位于周向加载机构23的上方,也是从力加载机构的整体结构的紧凑性考虑的,并非简单设置而成。
在第二平板213和第三平板214设置有两个第五平板216的基础上,为了进一步考虑整体结构的紧凑性,周向加载机构23固定于其中一个第五平板216,而不是选择将周向加载机构23固定在第二平板213或第三平板214上。
在本发明一个实施例中,轴向加载机构22包括第一输出轴221,第一输出轴221位于脊柱的轴向中心线上,第一输出轴221可沿脊柱的轴向上下伸缩,以通过第一输出轴221的伸缩来带动第一安装座25的上下移动;
周向加载机构23包括第二输出轴231,第二输出轴231可沿垂直于脊柱的轴向的方向前后伸缩,以通过第二输出轴231的伸缩来带动第一安装座25的转动。
在本实施例中,通过设置第一输出轴221和第二输出轴231,可以方便实现轴向加载机构22对第一安装座25沿脊柱的轴向加载以及周向加载机构23对第一安装座25沿脊柱的周向加载。
当然,轴向加载机构22也可以不包括第一输出轴221,周向加载机构23也可以不包括第二输出轴231,在此不进行限定。例如,通过人为控制第一安装座25的轴向加载和周向旋转,然后固定在某一位置。
此外,第一输出轴221位于脊柱的轴向中心线上,如此可以保证对脊柱的轴向加载效果。
当然,第一输出轴221也可以不位于脊柱的轴向中心线上,在此不进行具体限定。
在本发明一个实施例中,轴向加载机构22和周向加载机构23均为直线伺服电机,如此可以方便实现对脊柱的轴向加载控制和周向加载控制。
当然,轴向加载机构22和周向加载机构23也可以是液压机构或气压机构,在此对轴向加载机构22和周向加载机构23的具体类型不进行限定。
在本发明一个实施例中,轴向加载装置还包括第一连接件222,第一连接件222分别与第一输出轴221和第一力传感器223通过螺纹的方式固定。
由于轴向加载机构22和第一力传感器223均为标准件,二者通常而言不能直接固定连接,为了方便二者的固定连接,可以借助第一连接件222来分别与第一输出轴221和第一力传感器223螺纹固定连接。
当然,也可以不设置第一连接件222,即第一输出轴221可以和第一力传感器223通过二次加工的方式(例如将第一输出轴221的端部和第一力传感器223加工出可以相互配合的螺纹结构)直接固定,在此不进行限定。
请参见图5、7和9,在本发明一个实施例中,力加载机构还包括旋转组件232,旋转组件232包括旋转轴232a、固定座232b和轴承232c,旋转轴232a穿设于固定座232b和轴承232c,固定座232b将轴承232c固定在第三平板214,旋转轴232a的上端与第二输出轴231活动连接,下端与第一安装座25固定。
在本实施例中,通过设置旋转组件232,可以实现第一安装座25与第三平板214的转动连接。
当然,第一安装座25与第三平板214的转动连接还可以是其它方式,在此不进行限定。
请继续参见图5、7和9,在本发明一个实施例中,力加载机构还包括连接组件233,连接组件233包括依次连接的第二连接件233a、第三连接件233b和第四连接件233c,第二连接件233a的一端与第二输出轴231固定,另一端与第三连接件233b转动连接,第三连接件233b与第四连接件233c滑动连接,第四连接件233c与旋转轴232a固定连接,且第四连接件233c的轴向与旋转轴232a的轴向垂直。
在本实施例中,通过设置连接组件233,可以使得连接组件233具有转动自由度和滑动自由度,从而使得旋转轴232a可以沿其周向来回摆动。
当然,滑动自由度也可以省略,即连接组件233只包括依次连接的第二连接件233a和第四连接件233c,第二连接件233a的一端与第二输出轴231固定,另一端与第四连接件233c转动连接,第四连接件233c与旋转轴232a固定连接,且第四连接件233c的轴向与旋转轴232a的轴向垂直。省略滑动自由度的方案相比上述方案,其摆动幅度小,不利于实现对脊柱的周向加载效果,即上述具有转动自由度和滑动自由度的方案可以实现对脊柱更好的周向加载效果。
相关技术中,通常以脊柱为研究对象来进行力学相关性的研究,发明人的一些在先专利均公开了关于对脊柱施加轴向应力(即进行轴向加载)的技术方案。
例如,公开号为CN113057595A的专利公开了一种脊柱运动节段在体加载装置,该方案通过压缩弹簧来对脊柱进行轴向加载。然而,当脊柱出现蠕变时,该方案难以实现对脊柱在轴向上的连续恒力加载。
再例如,公开号为CN109468360A的专利公开了一种脊柱运动节段拉压一体式加载装置,该方案通过安装砝码来对脊柱进行轴向加载。虽然该方案可以实现对脊柱在轴向上的连续恒力加载,但是这种方式的加载方式为离散型加载(即通过更换不同质量的砝码来实现阶段性的恒力加载),无法实现连续变力加载,即不能有效消除蠕变带来的影响。
进一步地,由于人在走路过程中,脚部会不断地向脊柱施加轴向且连续的变力,因此为了研究更多的脊柱整体力学特性,有必要对脊柱的轴向加载装置进行改进。
为了解决该技术问题,发明人在研发过程中发现:可以通过轴向加载机构22、第一力传感器223和控制机构的三者协同,共同实现对脊柱的轴向连续恒力加载和轴向连续变力加载,从而能够有效消除蠕变带来的影响。也就是说,增加了轴向控制算法,而非简单的人为调节轴向的压力(例如更换不同质量的砝码)。
请参阅图3,在本发明一个实施例中,力加载机构还包括:
第一力传感器223,一端与第一输出轴221固定,另一端与第二平板213固定;
第二力传感器(图中未示出),一端与第二输出轴231固定,另一端与第二连接件233a固定;
控制机构(图中未示出),分别与轴向加载机构22、周向加载机构23、第一力传感器223和第二力传感器电连接;
通过控制机构控制轴向加载机构22对脊柱进行轴向连续恒力加载和轴向连续变力加载;
通过控制机构控制周向加载机构23对脊柱进行周向连续恒力加载和周向连续变力加载。
在本实施例中,通过轴向加载机构22、第一力传感器223和控制机构的三者协同,共同实现对脊柱的轴向连续恒力加载和轴向连续变力加载,从而能够有效消除蠕变带来的影响;通过周向加载机构23、第二力传感器和控制机构的三者协同,共同实现对脊柱的周向连续恒力加载和周向连续变力加载,从而能够研究脊柱在不同旋转作用力载荷下的变化。
可以理解的是,控制机构的芯片预设有相关的轴向控制算法和周向控制算法,通过获取第一力传感器223和第二力传感器检测到的当前作用力来适应性地改变第一输出轴221和第二输出轴231的位置偏移量,从而可以实现对脊柱的轴向连续恒力加载和轴向连续变力加载以及周向连续恒力加载和周向连续变力加载。
当对脊柱的轴向和周向加载达到一定时间后,脊柱会出现蠕变现象,此时需要通过获取第一力传感器223和第二力传感器检测到的当前作用力来适应性地改变第一输出轴221和第二输出轴231的位置偏移量,以确保对脊柱的轴向加载和周向加载效果。但是需要指出的是,由于力的信息可能由于加载的环境、脊柱的状态等因素导致信号采集出现失真的情况,因此在需要对第一力传感器223和第二力传感器采集的数据进行在线滤波,以达到减少环境噪声影响的目的,从而可以获得真实的接触力信息。
在一些实施方式中,本发明实施例可以采用基于卡尔曼滤波器的力感知信息滤波完成对力信号的估算。卡尔曼滤波是一种由线性系统状态方程,对系统状态进行最优估算的方法。由于其估算过程是通过迭代计算的方式实现的,在估算过程中,只需要考虑过程噪声和测量噪声以及当前时刻的系统状态,而不需要存储整体采集的数据,因此适合用于本文研究中对力传感信息实时获取的需求。
下面对控制机构的轴向控制算法和周向控制算法进行介绍。
在本发明一个实施例中,控制机构,用于执行如下操作:
S11、获取当前周期第一力传感器223检测到的当前作用力;
S12、基于当前周期的理论作用力和预设的系数,确定当前周期第一输出轴221的理论位置;
S13、保持理论位置不变,以实现轴向连续恒力加载;
S14、基于系数以及当前周期的当前作用力和理论作用力的差值,得到当前周期的位置差值;
S15、基于位置差值,对理论位置进行修正,以将理论作用力修正到当前作用力;
S16、将当前作用力作为下一周期的理论作用力,并执行步骤S11、S12、S14和S15,从而实现轴向连续变力加载。
在本实施例中,轴向加载机构22(例如电机)可以简化为弹簧模型,即F=kx,其中,F为弹力(即本实施例中的作用力),k为弹性系数(即本实施例中的系数),x为形变量(即本实施例中的第一输出轴221的位置)。因此,通过预设的理论作用力和预设的系数,可以得到第一输出轴221的理论位置,保持理论位置不变,以实现轴向连续恒力加载;通过第一力传感器223检测到的当前作用力、预设的理论作用力和预设的系数,可以得到第一输出轴221当前周期待修正的位置差值,从而可以基于该位置差值对第一输出轴221的理论位置进行修正,以将理论作用力修正到当前作用力,从而实现轴向连续变力加载。
举例来说,例如当前作用力为9.7N,理论作用力为10N,通过上述轴向控制算法,可以将第一力传感器223检测到的当前作用力修正为10N,以实现轴向连续恒力加载;再例如当前作用力为10.3N,理论作用力为10N,通过上述轴向控制算法,可以将第一力传感器223检测到的当前作用力修正为10N,以实现轴向连续恒力加载。
举例来说,例如当前作用力为9.7N,理论作用力为10N,通过上述轴向控制算法,可以将第一力传感器223检测到的当前作用力修正为9.7N,以实现轴向连续变力加载;再例如当前作用力为10.3N,理论作用力为10N,通过上述轴向控制算法,可以将第一力传感器223检测到的当前作用力修正为10.3N,以实现轴向连续变力加载。
在本发明一个实施例中,控制机构,用于执行如下操作:
S21、获取当前周期第二力传感器检测到的当前作用力;
S22、基于当前周期的理论作用力和预设的系数,确定当前周期第二输出轴231的理论位置;
S23、保持理论位置不变,以实现周向连续恒力加载;
S24、基于系数以及当前周期的当前作用力和理论作用力的差值,得到当前周期的位置差值;
S25、基于位置差值,对理论位置进行修正,以将理论作用力修正到当前作用力;
S26、将当前作用力作为下一周期的理论作用力,并执行步骤S21、S22、S24和S25,从而实现周向连续变力加载。
在本实施例中,周向加载机构23(例如电机)可以简化为弹簧模型,即F=kx,其中,F为弹力(即本实施例中的作用力),k为弹性系数(即本实施例中的系数),x为形变量(即本实施例中的第二输出轴231的位置)。因此,通过预设的理论作用力和预设的系数,可以得到第二输出轴231的理论位置,保持理论位置不变,以实现周向连续恒力加载;通过第二力传感器检测到的当前作用力、预设的理论作用力和预设的系数,可以得到第二输出轴231当前周期待修正的位置差值,从而可以基于该位置差值对第二输出轴231的理论位置进行修正,以将理论作用力修正到当前作用力,从而实现周向连续变力加载。
周向加载装置中的举例可以参见或借用轴向加载装置中的举例,在此不进行赘述。
需要说明的是,上述固定方式可以是螺纹连接,还可以是其它固定方式,在此不进行限定。
需要说明的是,在本文中,诸如第一和第二之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其它变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其它要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。在没有更多限制的情况下,由语句“包括一个……”限定的要素,并不排除在包括所述要素的过程、方法、物品或者设备中还存在另外的相同因素。
最后需要说明的是:以上所述仅为本发明的较佳实施例,仅用于说明本发明的技术方案,并非用于限定本发明的保护范围。凡在本发明的精神和原则之内所做的任何修改、等同替换、改进等,均包含在本发明的保护范围内。
- 一种适用于海上风机桩基振动试验的水平循环加载系统及加载方法
- 一种电动缸起竖系统加载与性能测试装置及测试方法
- 一种软件加载方法以及软件加载装置
- 一种巷道表面喷浆体力学效果测试的直墙半圆拱巷道加载装置及加载方法
- 一种脊柱的培养液的全循环装置、方法及加载系统
- 一种脊柱的培养液的全循环装置、方法及加载系统