三自由度遥操作力反馈主手
文献发布时间:2024-01-17 01:26:37
技术领域
本发明涉及遥操作机器人技术领域,具体来说是一种三自由度遥操作力反馈主手。
背景技术
随着工业技术的不断发展,工业机器人在焊接、装配、搬运等行业有着广泛地应用,且实现了自动化控制,但是在人类不适宜工作环境下,尤其是核辐射、高温高压等复杂环境、多样化且实时性作业,机器人很难实现自动作业,仍需要操作人员参与,其中遥操作主手是最常见的操作设备。
力反馈属于一种虚拟现实技术,可以通过机械结构来表达虚拟场景中的反作用力或者机器人的“感知力”,在远程操作中有着广泛地应用;现有技术中,遥操作主手主要由传感器获取主手位置和姿态信息,然后通过遥操作机器人系统将控制指令发送给机器人;然而,大部分遥操作主手并没有提供力反馈,一些遥操作主手只有单轴提供力反馈,在各个轴向上具有力反馈的遥操作主手中,大部分采用了私服电机或者减速器加电机的形式获取较大力觉反馈,该结构形式影响了操作流畅程度,增大了电机控制难度。
发明内容
针对现有技术的上述问题,本发明设计了一种工作空间小、具有力反馈三自由度的遥操作主手。
本发明采用以下技术方案:
本发明三自由度遥操作力反馈主手,其特征在于,包括了基座、操纵装置和末端操作组件;所述基座包括底盘和支撑组件;所述操纵装置包括第一关节组件、第二关节组件和第三关节组件,所述第一、二、三个关节组件依次首尾转动固定,形成三个自由度,每个关节均采用无刷直流电机驱动;
所述第一关节组件包括第一关节电机、第一关节电机座、第一关节连杆、第一关节外壳和第二关节驱动件;所述第二关节驱动件与所述第一关节连杆连接;
所述第二关节组件包括第二关节电机、第二关节连杆、第二关节外壳和第三关节驱动件;所述第三关节驱动件与所述第二关节连杆连接;
所述第一关节电机,用于带动所述第一关节连杆使所述末端操作组件能够绕第一方向运动;所述第二关节电机,用于带动所述第二关节连杆使所述末端操作组件能够绕第二方向运动;所述第三关节电机,用于带动所述末端操作组件使其自身能够绕第三方向运动;
所述第一关节电机的中心线、所述第二关节电机的中心线和所述第三关节电机的中心线相交于一点;
所述三自由度遥操作力反馈主手根据操作需求,使所述第一、二、三个关节组件电机在工作初始化阶段输出扭矩提供已知力,该已知力为实际操作中人为的设定值;所述三自由度遥操作力反馈主手被动接受期望力,并采集第一、二、三个关节组件的运动信息,然后将接受到的期望力信息和运动信息通过所述末端操作组件传输出去;所述末端操作组件接收传输来的反馈力信息,并使第一、二、三个关节组件电机实时输出扭矩,然后通过所述三自由度遥操作力反馈主手主动提供反馈力。
进一步的,所述三自由度遥操作力反馈主手采用动态控制;所述第一、二、三个关节组件均绕自身z轴旋转;所述三自由度遥操作力反馈主手的动态控制包括以下步骤:
A1、根据主手构型和参数构建D-H坐标系及运动学矩阵;
A2、实时采集关节电机的角度θ信息;
A3、通过拉格朗日力学方程构建主手动力学模型;
A4、采用几何法和代数法相关结合的方法求解欧拉-拉格朗日方程得到电机输出扭矩值;
进一步的,上述底盘与所述支撑组件连接;所述第一关节组件与所述支撑组件连接;所述末端操作组件与所述第三关节组件连接。
进一步的,上述支撑组件包括支撑主体、支撑外壳、主手电源板和第一关节电机驱动件;所述第一关节电机驱动件与所述支撑主体连接。
进一步的,上述关节驱动件包括电机控制板、电机驱动板和电机电源板;
所述第一关节驱动件驱动并控制所述第一关节电机带动所述第一关节连杆转动;
所述第二关节驱动件驱动并控制所述第二关节电机带动所述第二关节连杆转动;
所述第三关节驱动件驱动并控制所述第三关节电机带动所述末端操作组件转动。
进一步的,上述支撑组件、第一关节组件、第二关节组件、末端操作组件均设有零位校准卡位;
零位校准卡位呈条形状,支撑组件11的零位校准卡位设在支撑主体111的上端部,第一关节组件5的零位校准卡位设在其两端部且分别具有两个,第二关节组件6的零位校准卡位也设在其两端部且分别具有两个,在第一关节组件5相对支撑组件11转动到零位时,需要保证它们相应的条形状的零位校准卡位对齐,同样第二关节组件6相对第一关节组件5转动到零位时,需要保证它们相应的条形状的零位校准卡位对齐。
进一步的,上述零位校准卡位在零位校准时盖设有零位校准卡扣,零位校准卡扣为长方体块,其底部具有长方体的凹槽,该长方体的凹槽与条形状零位校准卡位的形状、尺寸相当。
进一步的,三自由度遥操作力反馈主手零位校准操作包括以下步骤:
B1、将第一关节组件安装于支撑组件上,对第一关节电机初始化,并将零位校准卡扣安装,获取第一关节电机的零位标定值;
B2、将第二关节组件安装于第一关节组件上,对第二关节电机初始化,并将零位校准卡扣安装,获取第二关节电机的零位标定值;
B3、将第三关节组件安装于第二关节组件上,对第三关节电机初始化,并将零位校准卡扣安装,获取第三关节电机的零位标定值。
进一步的,上所述末端操作组件上设有末端操作组件控制板、无线通信模块、触摸模块和/或至少两个操作按钮。所述无线通信模块向外传输所述的三自由度遥操作力反馈主手被动接受的期望力;无线通信模块接收外部传输的反馈力。
进一步的,上述第一关节电机、第二关节电机、第三关节电机上均设有非接触式角编码器。
进一步的,上述A1的求解方法包括以下步骤:
A11、根据连杆坐标系之间的齐次变换方程可以得出末端坐标系相对于基坐标系的齐次变换矩阵
其中,
进一步的,上述A3的求解方法包括以下步骤:
A31、设置广义坐标点为末端操作组件的质心,坐标定义为P=(P
A32、设置包含了点P与θ
L=K-P (2)
其中,K为三自由度遥操作力反馈主手的系统动能;P为三自由度遥操作力反馈主手的系统势能。
A33、采用拉格朗日方程第一型公式(3),对三自由度遥操作力反馈主手进行建模:
进一步的,上述A4的求解方法包括以下步骤:
A41、运动中的三自由度遥操作力反馈主手,系统动能包括所有运动零部件的运动动能,可表示为公式(4):
A42、运动中的三自由度遥操作力反馈主手,系统势能包括所有运动零部件的势能,可表示为公式(5):
A43、将公式(4)、(5)代入公式(2)即为拉格朗日方程,将q
A44、将q
本发明的有益效果如下:
1、本发明提供的遥操作主手采用电机驱动关节运动,减小整体结构复杂性,且在电机上设有非接触式角编码器,可以实时获取关节角度,提供主手数据基础;关节之间采用连杆连接,结构设计简单且易组装,可以尽量地避免运动时互相干扰,最大程度地满足操作连贯性和实时性。
2、本发明提供的遥操作主手可以根据机器人的工作负载大小,向操作者提供相应的力觉信息达到临场感和减轻操作者长时间操作的疲惫感。
3、本发明的末端操作组件中安装的触摸模块和按钮开关可用于控制从端机器人附加的电气、液压或气动工具。
4、本发明提供的遥操作主手质量轻、体积小,具有较高的便携性。
附图说明
为了更清楚地说明本发明的技术方案,下面将对实施例所需要使用的附图作一简单地介绍。下面描述中的附图是本发明的一些实施例,是用来提供对本发明的进一步理解,本发明的示意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定。
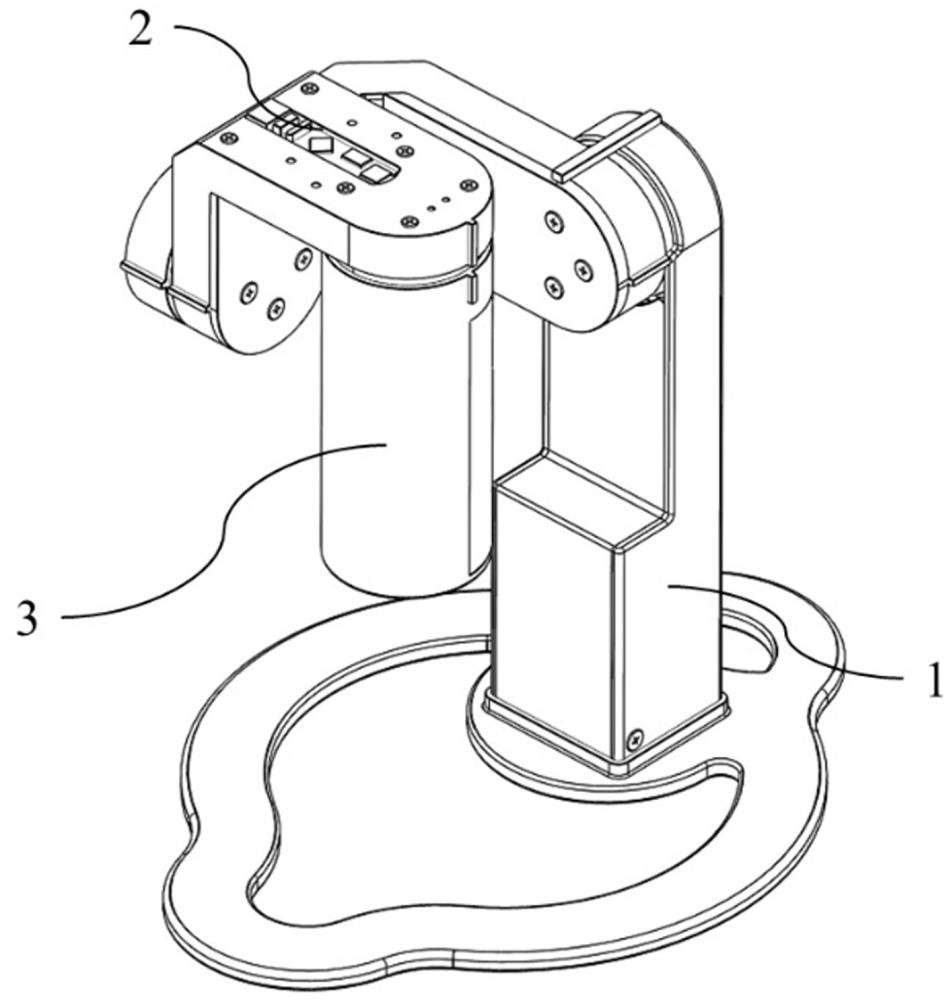
图1为本发明提供的三自由度遥操作力反馈主手结构示意图;
图2为本发明提供的三自由度遥操作力反馈主手基座示意图;
图3为本发明提供的三自由度遥操作力反馈主手操纵装置示意图之一;
图4为本发明提供的三自由度遥操作力反馈主手关节电机一般结构示意图;
图5为本发明提供的三自由度遥操作力反馈主手第一关节示意图之一;
图6为本发明提供的三自由度遥操作力反馈主手第二关节示意图之一;
图7为本发明提供的三自由度遥操作力反馈主手支撑组件示意图;
图8为本发明提供的三自由度遥操作力反馈主手第一关节示意图之二;
图9为本发明提供的三自由度遥操作力反馈主手第二关节示意图之二;
图10为本发明提供的三自由度遥操作力反馈主手末端操作组件示意图之一;
图11为本发明提供的三自由度遥操作力反馈主手末端操作组件示意图之二;
图12为本发明提供的三自由度遥操作力反馈主手使用状态流程示意图;
图13为本发明提供的三自由度遥操作力反馈主手各个关节坐标系示意图;
图14为本发明提供的三自由度遥操作力反馈主手零位校准卡扣示意图;
图15为本发明提供的三自由度遥操作力反馈主手操纵装置示意图之二;
附图标记:
1、基座;2、操纵装置;3、末端操作组件;
5、第一关节组件;6、第二关节组件;7、第三关节组件;8、零位校准卡扣;
10、底盘;11、支撑组件;111、支撑主体;112、支撑外壳;113、主手电源板;114、支撑组件零位校准卡位;
21、关节滑环;22、关节电机非接触式角编码器;
31、末端操作主体;32、末端操作控件;311、末端操作组件零位校准卡位;3111、末端操作控制板;3112、无线通信模块;3211、触摸模块;3212、操作按钮;
51、第一关节电机;52、第一关节电机底座;53、第一关节连杆;54、第一关节外壳;511、第一关节电机驱动件;531、第一关节组件零位校准卡位;5111、第一关节电机控制板;5112、第一关节电机驱动板;5113、第一关节电机电源板;
61、第二关节电机;62、第二关节连杆;63、第二关节连杆外壳;611、第二关节电机驱动件;621、第二关节组件零位校准卡位;6111、第二关节电机控制板;6112、第二关节电机驱动板;6113、第二关节电机电源板;
71、第三关节电机;711、第二关节电机驱动件;7111、第三关节电机控制板;7112、第三关节电机驱动板;7113、第三关节电机电源板。
具体实施方式
为了使本发明的目的、技术方案更加清楚,下面将结合本发明中的附图,对本发明中的技术方案进行清楚、完整地阐述。显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。
下面结合附图描述本发明的三自由度遥操作力反馈主手。
图1是本发明提供的三自由度遥操作力反馈主手结构示意图,如图1所示,该三自由度遥操作力反馈主手包括基座1、操纵装置2和末端操作组件3。
其中,操纵装置2提供主手三个自由度的运动。
进一步地,图2是三自由度遥操作力反馈主手基座示意图,如图2所示,基座1包括底盘10和支撑组件11;底盘10上设有凹台,便于与支撑组件11固定连接;底盘10用于防止主手倾覆力矩导致翻滚,底盘10的基本形状为椭圆环形的平板,在椭圆环形的长轴两端部与外凸弧形衔接,在椭圆环形与外凸弧形之间设有连续板片,连续板片与平板为等厚。
需要说明的是,支撑组件11背面设有主手总电源走线孔和总电源开关;总电源走线孔也可以走信号线,便于与上位机连接;总电源开关控制开或断遥操作主手电源。
其中,操纵装置2安装在支撑组件11上;末端操作组件3安装在操纵装置2上。
进一步地,图3是三自由度遥操作力反馈主手操纵装置示意图之一,操纵装置2包括第一关节组件5、第二关节组件6、第三关节组件7,三个组件依次首尾转动铰接连接,形成三个自由度,每个关节均采用无刷直流电机驱动。
具体地,如图4所示,图4是三自由度遥操作力反馈主手关节电机一般结构示意图,电机为中空无刷直流电机,在电机中空位置安装关节滑环21;所有关节电机上均设有非接触式角编码器22,用于实现操作过程中转动角度信号的监控。
需要说明的是,关节滑环21便于主手结构内部走线,能够简化结构设计且易于组装;由于遥操作主手无需高速运作,关节滑环21使用寿命与安装需求满足主手设计。
进一步地,图5是三自由度遥操作力反馈主手第一关节示意图之一,如图5所示,第一关节电机51安装在第一关节电机座52上;通过驱动第一关节电机51带动第一关节连杆53使末端操作组件3绕第一方向旋转运动,即实现末端操作组件3第一个自由度运动。
进一步地,图6是三自由度遥操作力反馈主手第二关节示意图之一,如图6所示,通过驱动第二关节电机61带动第二关节连杆62使末端操作组件3绕第二方向旋转运动,即实现末端操作组件3第二个自由度运动。
具体地,通过驱动第三关节电机71带动末端操作组件3使其绕第三方向旋转运动,即实现末端操作组件3第三个自由度运动。
需要说明的是,本发明实施例提供的三自由度遥操作力反馈主手,采用电机直接驱动关节运动,减小整体结构复杂性;关节电机之间采用连杆连接,结构设计简单且易组装,可以尽量地避免运动时互相干扰;降低了电机控制难度,提高了操作流畅度,最大程度地满足操作连贯性和实时性。
进一步地,图7是三自由度遥操作力反馈主手支撑组件示意图,如图7所示,支撑组件11包括支撑主体111、支撑外壳112、主手电源板113和第一关节电机驱动件511;在支撑主体12上设有支撑组件零位校准卡位114;第一关节电机驱动件511与支撑主体111连接。
具体地,第一关节驱动件511驱动并控制第一关节电机51带动第一关节连杆52转动。
进一步地,图8是三自由度遥操作力反馈主手第一关节示意图之二,第一关节组件5包括第一关节电机51、第一关节电机座52、第一关节连杆53、第一关节外壳54和第二关节驱动件611;如图8所示,在第一关节连杆53的两端设有第一关节零位校准卡位531;第二关节驱动件611与第一关节连杆53连接。
具体地,第二关节驱动件611驱动并控制第二关节电机61带动第二关节连杆62转动。
进一步地,图9是三自由度遥操作力反馈主手第二关节示意图之二,第二关节组件6包括第二关节电机61、第二关节连杆62、第二关节外壳63和第三关节驱动件711;如图9所示,在第二关节连杆62的两端设有第二关节零位校准卡位621;第三关节驱动件711与第二关节连杆62连接。
具体地,第三关节驱动件711驱动并控制第三关节电机71带动末端操作组件3转动。
本发明实施例提供的三自由度遥操作力反馈主手中,三个关节的驱动件包括电机控制板、电机驱动板和电机电源板。如图7所示,第一关节电机控制板5111、第一关节电机驱动板5112和第一关节电机电源板5113安装在支撑主体111上;如图8所示,第二关节电机控制板6111、第二关节电机控制板6112和第二关节电机电源板6113安装在第一关节连杆53上;如图9所示,第三关节电机控制板7111、第三关节电机驱动板7112和第三关节电机电源板7113安装在第二关节连杆62上。
需要说明的是,电机控制板是用于控制电机的微型操作系统,可以是任一种控制芯片;电机驱动板是用于驱动无刷直流电机的功率板,也可以是任一种驱动芯片,且功率板集成电流采样功能;电机电源板是给电机控制板、电机驱动板和电机提供电源。
根据本发明的实施例,图10是三自由度遥操作力反馈主手末端操作组件示意图之一,如图10所示,末端操作组件包括末端操作主体31、末端操作控件32和末端操作组件零位校准卡位311;末端操作控件32上设有触摸模块3211和/或至少两个操作按钮3212;末端操作组件3上设有至少两个操作按钮3212,操作按钮3212用于控制从端机器人附加的电气、液压或气动工具。
其中,触摸模块3211可以获取遥操作主手当前状态;具体地,操作员在操作主手时,触摸模块3211感知到末端操作组件被使用,使遥操作主手进入使用状态;操作员没有在操作主手时,触摸模块3211未有感知,使遥操作主手切换至悬停状态,等待操作员使用。
进一步地,图11是三自由度遥操作力反馈主手末端操作组件示意图之二,末端操作主体31上设有末端操作控制板3111、无线通信模块3112。
其中,末端操作控制板3111通过第三关节组件7、第二关节组件6和第一关节组件5与各个关节电机控制板进行通信;具体地,数据线通过各个关节组件的滑环11与关节电机控制板连接;各个关节电机的非接触式角编码器12实时获取电机机械角度和电角度,通过与对应的电机控制板连接,实时地控制电机输出扭矩并通过控制板将角度信息发送给末端操作控制板3111。
其中,无线通信模块3112将主手被动接受到的期望力信息和采集到的第一、二、三个关节组件的运动信息向遥操作机器人系统发送;实时接收来自遥操作机器人系统的反馈力信息,并使第一、二、三个关节组件电机实时输出扭矩,通过主手向操作者提供反馈力;具体地,通过遥操作机器人系统的指令可以切换三自由度遥操作力反馈主手操纵模式。
需要说明的是,三自由度遥操作力反馈主手操纵模式可以分为空间位置模式和空间姿态模式;空间位置模式时,遥操作主手的三自由度对应为空间点位置上的三自由度,通过转动三个关节角度的幅度,增量式地移动空间点的位置;空间姿态模式时,遥操作主手的三自由度对应为空间点姿态上的三自由度,通过转动三个关节来旋转空间点的姿态;空间姿态模式也可以对具有相同构型的工业机器人关节的映射,通过旋转三关节的角度映射至工业机器人末端位姿调整机构的三个关节的角度。
示例地,一部分六自由度或者七自由度工业机器人其对空间点的位姿变换主要依靠最后三个自由度的关节;这三个关节其旋转中心轴两两相交且垂直,与本发明三自由度遥操作力反馈主手的三个关节对应,可以通过遥操作主手进行映射控制。
其中,从端机器人的力觉信息或者虚拟场景的反作用力通过遥操作机器人系统向末端操作组件3发送反馈力信息,将从端机器人受力情况以触觉可感知的形式反馈给操作者,为操作者提供临场感;具体地,无线通信模块3112接收指令信息并传输给末端操作控制板3111;末端操作控制板3111处理指令,将力反馈指令与各个关节电机控制板通信,实时控制关节电机输出扭矩;末端操作组件3的扭转方向与实际环境中从端机器人或者虚拟场景所受外力相同,反馈力与从端机器人或者虚拟场景所受外力呈线性关系。
本发明实施例提供的三自由度遥操作力反馈主手中,为了使机器人在运动过程中具有良好的稳定性和动态性能,三自由度遥操作力反馈主手采用动态控制;如图12是三自由度遥操作力反馈主手使用状态流程示意图,三自由度遥操作力反馈主手使用状态下先进行初始化,使三个关节电机输出扭矩为操作者提供已知力,该已知力为实际操作中人为的设定值;操作者向三自由度遥操作力反馈主手施以期望力,由主手被动接受期望力;采集第一、二、三个关节电机的角度,作为三自由度遥操作力反馈主手动态控制的已知参数;将末端操作组件3接受到的期望力大小作为已知参数,通过三自由度遥操作力反馈主手动态控制,实时地计算出关节电机所需输出扭矩值、末端操作组件3的期望力和末端操作组件3的运动信息;将计算出的扭矩值,通过关节电机的电流控制实时地提供扭矩;通过末端组件3的无线通信模块3112将三自由度遥操作力反馈主手的期望力信息和运动信息发送给遥操作机器人系统,远程控制从端机器人。
进一步地,通过末端操作组件3的无线通信模块3112接收遥操作机器人系统发送的反馈力信息和运动信息;采集第一、二、三个关节电机的角度,作为三自由度遥操作力反馈主手动态控制的已知参数,采集第一、二、三个关节电机的电流值,作为关节电机电流控制的已知参数;三自由度遥操作力反馈主手进行动态控制,其中将末端操作组件3需要提供的反馈力大小作为已知参数,实时地计算出关节电机所需输出扭矩值和末端操作组件3的运动信息;将计算出的扭矩值,通过关节电机的电流控制实时地提供扭矩;三自由度遥操作力反馈主手向操作者提供反馈力,使操作者具有力觉临场感;操作者可以继续向三自由度遥操作力反馈主手施以期望力,由主手被动接受期望力,从而形成力觉控制闭环。
需要说明的是,三自由度遥操作力反馈主手接受到的期望力与从端机器人实际工作输出的期望力呈线性关系;从端机器人实际工作受到的反馈力与三自由度遥操作力反馈主手提供的反馈力呈线性关系。
具体地,三自由度遥操作力反馈主手的动态控制包括以下步骤:
Step1:根据主手构型和参数构建D-H坐标系及运动学矩阵;
Step2:实时采集关节电机的角度θ信息;
Step3:通过拉格朗日力学方程构建主手动力学模型;
Step4:几何法和代数法相关结合的方法求解欧拉-拉格朗日方程得到电机输出扭矩值;
进一步地,图13是三自由度遥操作力反馈主手各个关节坐标系示意图,基坐标系为x
具体地,基坐标系原点到第一关节坐标系原点沿z
进一步地,根据连杆坐标系之间的齐次变换方程可以得出末端坐标系相对于基坐标系的齐次变换矩阵
其中,
进一步地,非接触式编码器22测得三个关节电机角度θ
进一步地,设置包含了点P与θ
L=K-P (2)
其中,K为三自由度遥操作力反馈主手的系统动能;P为三自由度遥操作力反馈主手的系统势能。
进一步地,采用拉格朗日方程第一型公式(3),对三自由度遥操作力反馈主手进行动力学建模:
进一步地,三自由度遥操作力反馈主手运动部件包括:第一关节连杆组件5除去第一关节电机51和第一关节电机座52的部分、第二关节连杆组件6、第三关节组件7和末端操作组件3;系统动能包括所有运动零部件的运动动能,可表示为公式(4):
进一步地,系统势能包括所有运动零部件的势能,可表示为公式(5):
进一步地,将公式(4)、(5)代入公式(2)即为拉格朗日方程,将q
进一步地,将q
本发明实施例提供的三自由度遥操作力反馈主手中,如图7-图10所示,支撑主体111、第一关节组件5、第二关节组件6、末端操作组件3均设有零位校准卡位。
需要说明的是,为了更好地控制从端机器人,在三自由度遥操作力反馈主手上设有零位校准位,便于对操纵装置2的关节电机进行零位设置和校准;在第一关节组件5、第二关节组件6和末端操作组件3上可以设置多个零位校准卡位,以达到更好的控制效果;操纵装置2的关节电机零位设置只需要在初次或重新设置时即可,该零位校准卡位呈条形状,支撑组件11的零位校准卡位设在支撑主体111的上端部,第一关节组件5的零位校准卡位设在其两端部且分别具有两个,第二关节组件6的零位校准卡位也设在其两端部且分别具有两个,在第一关节组件5相对支撑组件11转动到零位时,需要保证它们相应的条形状的零位校准卡位对齐,同样第二关节组件6相对第一关节组件5转动到零位时,需要保证它们相应的条形状的零位校准卡位对齐。
具体地,图14是三自由度遥操作力反馈主手零位校准卡扣8的示意图,零位校准卡扣8为长方体块,其底部具有长方体的凹槽,该长方体的凹槽与条形状零位校准卡位的形状、尺寸相当。
具体地,三自由度遥操作力反馈主手零位校准操作包括:
Step1:将第一关节组件5安装于支撑组件11上,对第一关节电机51初始化,并将零位校准卡扣8安装,获取第一关节电机51的零位标定值;
Step2:将第二关节组件6安装于第一关节组件5上,对第二关节电机61初始化,并将零位校准卡扣8安装,获取第二关节电机61的零位标定值;
Step3:将第三关节组件7安装于第二关节组件6上,对第三关节电机71初始化,并将零位校准卡扣8安装,获取第三关节电机71的零位标定值。
需要说明的是,零位校准卡扣7可以是其它结构形式,或使两两相连关节组件的零位校准卡位对齐的结构即可。
本发明实施例提供的三自由度遥操作力反馈主手中,图15是三自由度遥操作力反馈主手操纵装置示意图之二,如图13所示,第一关节电机51的中心线、第二关节电机61的中心线和第三关节电机71的中心线相交于一点O;相交于一点O可以克服和避免第一关节组件5、第二关节组件6和第三关节组件7带动末端操作组件3运动时存在的干扰问题。
需要说明的是,操纵装置2由第一关节组件5、第二关节组件6和第三关节组件7构成,具有三个自由度,且操纵装置2集成电机控制、驱动和电源,具有重量小、结构简单易安装的特点;可以将操纵装置2安装在其它主手末端上,亦可以更换末端操作组件3结构,以达到更好地控制从端机器人的效果。
本发明实施例提供的三自由度遥操作力反馈主手通常重量小于1.5Kg,由于体积小和质量轻,具有较高的便携性;本发明三自由度遥操作力反馈主手可以满足工业机器人需求,通过参数优化与调整或者更换末端操作组件,还可以胜任更复杂的场合。
最后应说明的是:以上实施例仅用以说明本发明的技术方案,而非对其限制;凡依本发明技术方案所作的改变,所产生的功能作用未超出本发明技术方案的范围时,均属于本发明的保护范围。
- 微创手术机器人主从同构式遥操作力反馈主手
- 微创手术机器人主从同构式遥操作力反馈主手