自动调酒机器人系统
文献发布时间:2023-06-19 11:09:54
技术领域
本发明涉及机器人技术领域,具体而言,涉及一种自动调酒机器人系统。
背景技术
目前,调制鸡尾酒越来越多的受到市场的青睐,而其中现场调制的鸡尾酒更是让更多的消费者喜欢。而很多的调酒的方式是比较流程化的,但比较耗费调酒师的体力的。因此,上面上也出现了可以自动调酒的机器人。
自动调酒的机器人一般包括调酒用的机械臂和存放酒瓶用的酒柜,市面上的自动调酒的机器人的酒柜基本都是固定式的,整体系统占用面积大,摆放酒瓶数量有限。对于酒柜边缘处的酒瓶,需要对机械臂的臂展长度要求很高,也对与机械臂的控制要求更高。
因此,上述的自动调酒的机器人在实际使用时,灵活性和稳定性不高。
发明内容
本发明的主要目的在于提供一种自动调酒机器人系统,以解决现有技术中自动调酒机器人取酒的灵活性和稳定性不高的问题。
为了实现上述目的,本发明提供了一种自动调酒机器人系统,包括:旋转酒架,旋转酒架用于盛放多种酒瓶;驱动机构,驱动旋转酒架旋转;机械臂,设置在旋转酒架处;控制装置,与驱动机构和机械臂电连接,控制装置接收调酒信息,并根据调酒信息控制驱动机构运行以驱动旋转酒架将对应种类的酒瓶旋转到与机械臂相对,控制装置还控制机械臂从旋转酒架上取酒。
在一个实施方式中,自动调酒机器人系统还包括人机交互装置,人机交互装置与控制装置电连接,人机交互装置用于接收用户操作,并生成调酒信息发送给控制装置。
在一个实施方式中,驱动机构包括电机和电机控制器,电机与旋转酒架驱动连接,用于驱动旋转酒架转动,电机控制器与控制装置和电机电连接,电机控制器接收控制装置发送的旋转电信号,并根据旋转电信号控制电机工作。
在一个实施方式中,电机为伺服电机,电机控制器为伺服控制器。
在一个实施方式中,控制装置包括通讯模块和CPU,通讯模块分别与CPU、人机交互装置和驱动机构通讯连接,CPU与机械臂电连接,用于控制机械臂从旋转酒架上取酒。
在一个实施方式中,控制装置还包括I/O模块,CPU通过I/O模块与机械臂电连接。
在一个实施方式中,机械臂包括机械臂控制器和机械臂本体,机械臂控制器分别与控制装置和机械臂本体电连接,机械臂控制器接收控制装置发送的动作电信号,并根据动作电信号控制机械臂本体的动作。
在一个实施方式中,自动调酒机器人系统还包括原点检测装置,原点检测装置与控制装置电连接,原点检测装置用于检测旋转酒架的位置信息并将位置信息发送给控制装置,控制装置根据位置信息控制旋转酒架转动回初始位置。
在一个实施方式中,自动调酒机器人系统还包括供电装置,供电装置与控制装置电连接。
应用本发明的技术方案,相较于以往的固定式的酒柜,旋转酒架的平面空间占用相对较小,而且自动调酒机器人系统在调酒时,可以让控制装置根据接收的调酒信息控制驱动机构运行,驱动旋转酒架将对应种类的酒瓶旋转到与机械臂相对,就可以让机械臂每次都在既定的位置从旋转酒架上取酒。这样一来,对于机械臂的臂展长度没有要求,对于机械臂的控制要求也相对较低,提高了自动调酒机器人系统的灵活性和稳定性。
除了上面所描述的目的、特征和优点之外,本发明还有其它的目的、特征和优点。下面将参照图,对本发明作进一步详细的说明。
附图说明
构成本发明的一部分的说明书附图用来提供对本发明的进一步理解,本发明的示意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定。在附图中:
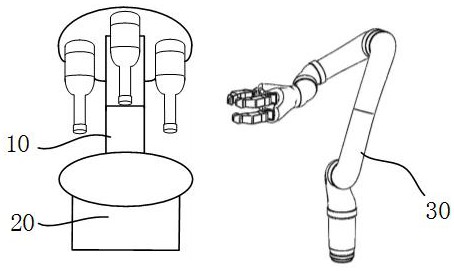
图1示出了根据本发明的自动调酒机器人系统的实施例的结构示意图;
图2示出了图1的自动调酒机器人系统的系统原理示意图。
具体实施方式
需要说明的是,在不冲突的情况下,本发明中的实施例及实施例中的特征可以相互组合。下面将参考附图并结合实施例来详细说明本发明。
为了使本技术领域的人员更好地理解本发明方案,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分的实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都应当属于本发明保护的范围。
需要说明的是,本发明的说明书和权利要求书及上述附图中的术语“第一”、“第二”等是用于区别类似的对象,而不必用于描述特定的顺序或先后次序。应该理解这样使用的术语在适当情况下可以互换,以便这里描述的本发明的实施例。此外,术语“包括”和“具有”以及他们的任何变形,意图在于覆盖不排他的包含,例如,包含了一系列步骤或单元的过程、方法、系统、产品或设备不必限于清楚地列出的那些步骤或单元,而是可包括没有清楚地列出的或对于这些过程、方法、产品或设备固有的其它步骤或单元。
需要注意的是,这里所使用的术语仅是为了描述具体实施方式,而非意图限制根据本申请的示例性实施方式。如在这里所使用的,除非上下文另外明确指出,否则单数形式也意图包括复数形式,此外,还应当理解的是,当在本说明书中使用术语“包含”和/或“包括”时,其指明存在特征、步骤、操作、器件、组件和/或它们的组合。
图1和图2示出了本发明的自动调酒机器人系统的实施方式,该自动调酒机器人系统包括旋转酒架10、驱动机构20、机械臂30和控制装置40。其中,旋转酒架10旋转酒架10用于盛放多种酒瓶,驱动机构20驱动旋转酒架10旋转,机械臂30设置在旋转酒架10处。控制装置40与驱动机构20和机械臂30电连接,控制装置40接收调酒信息,并根据调酒信息控制驱动机构20运行以驱动旋转酒架10将对应种类的酒瓶旋转到与机械臂30相对,控制装置40还控制机械臂30从旋转酒架10上取酒。
应用本发明的技术方案,相较于以往的固定式的酒柜,旋转酒架10的平面空间占用相对较小,而且自动调酒机器人系统在调酒时,可以让控制装置40根据接收的调酒信息控制驱动机构20运行,驱动旋转酒架10将对应种类的酒瓶旋转到与机械臂30相对,就可以让机械臂30每次都在既定的位置从旋转酒架10上取酒。这样一来,对于机械臂30的臂展长度没有要求,对于机械臂30的控制要求也相对较低,提高了自动调酒机器人系统的灵活性和稳定性。
更为优选的,如图2所示,在本实施例的技术方案中,自动调酒机器人系统还包括人机交互装置50,人机交互装置50与控制装置40电连接,人机交互装置50用于接收用户操作,并生成调酒信息发送给控制装置40。通过人机交互装置50,用户可以输入调酒的配方以及操作工艺,之后人机交互装置50就可以将用户操作生成用于控制的调酒信息发送给控制装置40,让控制装置40对驱动机构20和机械臂30加以控制。
可选的,在本实施例的技术方案中,驱动机构20包括电机和电机控制器,电机与旋转酒架10驱动连接,电机控制器与控制装置40和电机电连接。在使用时,电机控制器接收控制装置40发送的旋转电信号,并根据旋转电信号转换为控制电机运行的电流信号控制电机工作,电机就可以驱动旋转酒架10转动到指定的位置,让对应种类的酒瓶与机械臂30相对,以方便机械臂30从旋转酒架10上取酒。优选的,如图2所示,在本实施例的技术方案中,电机为伺服电机,电机控制器为伺服控制器。作为其他的可选的,电机也可以是步进电机,相对应的电机控制器为步进控制器。
作为一种可选的实施方式,如图2所示,在本实施例的技术方案中,控制装置40包括通讯模块和CPU,通讯模块分别与CPU、人机交互装置50和驱动机构20通讯连接,CPU与机械臂30电连接。在使用时,CPU控制机械臂30从旋转酒架10上取酒。可选的,该CPU可以是PLC芯片或者是其他种类的处理器。可选的,控制装置40还包括I/O模块,CPU通过I/O模块与机械臂30电连接。
如图2所示,在本实施例的技术方案中,机械臂30包括机械臂控制器和机械臂本体,机械臂控制器分别与控制装置40和机械臂本体电连接。在使用时,机械臂控制器接收控制装置40发送的动作电信号,并根据动作电信号控制机械臂本体的动作,通过机械臂控制器可以将动作电信号转换为控制机械臂本体动作具体的电机控制。具体的,在本实施例的技术方案中,机械臂控制器与I/O模块电连接,CPU通过I/O模块对机械臂控制器发送动作电信号。优选的,在本实施例的技术方案中,机械臂本体为六轴机械臂。
更为优选的,在本实施例的技术方案中,如图2所示,自动调酒机器人系统还包括原点检测装置60,原点检测装置60与控制装置40电连接。在使用时,原点检测装置60检测旋转酒架10的位置信息并将位置信息发送给控制装置40,控制装置40根据位置信息控制旋转酒架10转动回初始位置。具体的,在本实施例的技术方案中,原点检测装置60与I/O模块电连接,原点检测装置60将检测到的位置信息通过I/O模块发送给CPU,CPU对比位置信息与初始位置信息之间的差值,并根据差值发送旋转电信号给驱动机构20。
优选的,自动调酒机器人系统还包括供电装置70,供电装置70与控制装置40电连接。供电装置70直接对控制装置40供电,并通过控制装置40再对驱动机构20、机械臂30和人机交互装置50供电。
具体的,本发明的自动调酒机器人系统在使用时,人机交互装置50负责新建或更改调酒配方,CPU通过通讯模块与伺服控制器进行通讯,来控制伺服电机定位,伺服电机采用增量式编码器,实时采集当前位置,实现闭环控制,保证酒架旋转定位精度。旋转酒架定位完成后,CPU通过I/O模块向机械臂控制器下发接酒及调酒指令,机械臂本体负责接酒动作,每次接酒动作接一种酒,接酒完成后旋转酒架10再次定位,直到所需酒品接酒完毕为止。机械臂本体示教只需要示教单个工作点,示教方便,简单。原点检测装置60负责旋转酒架10的回原点操作,每次调酒结束旋转酒架都进行回原点操作,保证每次调酒开始位置的一致性。
本发明采用人机交互装置50修改配方,使调酒配方更加灵活,旋转酒架解决了市面上自动调酒设备占地面积大,灵活性低等问题。整体系统操作简单,稳定性强,更换原料简单。
由上述内容可知,本发明采用旋转酒架10与机械臂30配合,采用旋转酒架10,可摆放酒瓶数量和种类明显增加,有效地解决了原料种类少、原料占用面积多、机械臂30示教繁琐、灵活稳定性不高等问题。具有的特点包括:1、占用空间少,配酒灵活;2、闭环控制,保证旋转酒架10定位精准;3、机械臂30可以单点示教,示教简单,累计误差小。
需要说明的是,本发明的技术方案可以方便的适用于商场、餐厅、酒吧、商业综合体等场所。
除非另外具体说明,否则在这些实施例中阐述的部件和步骤的相对布置、数字表达式和数值不限制本发明的范围。同时,应当明白,为了便于描述,附图中所示出的各个部分的尺寸并不是按照实际的比例关系绘制的。对于相关领域普通技术人员已知的技术、方法和设备可能不作详细讨论,但在适当情况下,所述技术、方法和设备应当被视为授权说明书的一部分。在这里示出和讨论的所有示例中,任何具体值应被解释为仅仅是示例性的,而不是作为限制。因此,示例性实施例的其它示例可以具有不同的值。应注意到:相似的标号和字母在下面的附图中表示类似项,因此,一旦某一项在一个附图中被定义,则在随后的附图中不需要对其进行进一步讨论。
为了便于描述,在这里可以使用空间相对术语,如“在……之上”、“在……上方”、“在……上表面”、“上面的”等,用来描述如在图中所示的一个器件或特征与其他器件或特征的空间位置关系。应当理解的是,空间相对术语旨在包含除了器件在图中所描述的方位之外的在使用或操作中的不同方位。例如,如果附图中的器件被倒置,则描述为“在其他器件或构造上方”或“在其他器件或构造之上”的器件之后将被定位为“在其他器件或构造下方”或“在其他器件或构造之下”。因而,示例性术语“在……上方”可以包括“在……上方”和“在……下方”两种方位。该器件也可以其他不同方式定位(旋转90度或处于其他方位),并且对这里所使用的空间相对描述作出相应解释。
在本发明的描述中,需要理解的是,方位词如“前、后、上、下、左、右”、“横向、竖向、垂直、水平”和“顶、底”等所指示的方位或位置关系通常是基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,在未作相反说明的情况下,这些方位词并不指示和暗示所指的装置或元件必须具有特定的方位或者以特定的方位构造和操作,因此不能理解为对本发明保护范围的限制;方位词“内、外”是指相对于各部件本身的轮廓的内外。
以上所述仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
- 自动调酒机器人系统
- 调酒机器人自动化控制系统及其实现方法