用于容器封盖的封盖机
文献发布时间:2023-06-19 11:13:06
技术领域
本发明涉及一种根据权利要求1的用于容器封盖、如瓶子封盖的封盖机和根据权利要求10的用于容器封盖、如瓶子封盖的方法。
背景技术
根据现有技术,封盖机尤其是在化妆业和食品加工业如饮料工业领域已众所周知。这些封盖机例如可以被设计成回转机然而也可以是直线工作的机器。关于此已知根据现有技术的足够多的设备。
封盖机分别包含一个或多个封盖元件,其将盖、例如螺旋盖施装到容器、例如塑料容器上。为此,盖要么仅压向容器要么在应用转动运动或者说扭矩情况下施装到容器上。
为此必须控制封盖元件,这是因为它们通常必须将施装到容器上的盖先从储存部取出,并且随后必须施装到容器上。该运动的控制在现有技术中通常通过控制凸轮进行,控制凸轮机械控制封盖元件的运动(向上和向下运动以及旋转)。
备选地根据DE 103 56 222A1已知一种用于将盖塞拧接到容器上的设备,其中,给封盖元件的抓持元件配属有控制机构,其随着封盖元件运行和运动,以便打开或合上抓持元件。
在该过程期间由于机械调节抓持元件的运动原则上提供较高的精度,因而可以可靠且可复制地进行容器封盖,利用这些封盖机将不同的盖施装到容器上是很困难的,尤其这涉及盖的长度以及直径。如果需要切换批次或规格,必须完整更换各个封盖元件和/或用于控制封盖元件运动的机械控制元件,这导致明显的停机时间并且通常伴随着较大的人工成本。
发明内容
因而从现有技术出发,本发明的任务在于说明一种封盖机,利用该封盖机获得对抓持盖和松开盖的可靠控制,同时在构建机器和/或运行机器时,尤其在批次切换的情况下可以将成本保持得尽量低。
该任务根据本发明通过根据权利要求1的用于容器封盖、例如瓶子封盖的封盖机和根据权利要求10的用于容器封盖、例如瓶子封盖的方法解决。
本发明的有利改进方案纳入从属权利要求。
根据本发明的用于容器封盖,例如瓶子封盖的封盖机包括用于将盖安装在容器上的至少一个封盖元件,其中,封盖元件包括用于抓持盖的抓持元件和调整机构,调整机构使抓持元件能够在抓持定位和打开定位之间运动,在抓持定位中,抓持元件能够抓持和保持盖,其中,调整机构通过在容纳盖时产生的压力作用能够将抓持元件调整到抓持定位中,并且在将被保持的盖传递到容器上时再次产生的压力作用下能够将抓持元件调整到打开定位中,其中,调整机构包括保持元件,保持元件被构造成将抓持元件保持在抓持定位中。
因为抓持元件的操纵及其借助调整机构将抓持元件调整到抓持定位或打开定位中仅通过在容纳盖时和在将被保持的盖传递到容器上时产生的压力作用来实现,所以机械控制抓持元件运动的附加的控制凸轮是多余的,从而可以在不同的盖的情况下应用同一抓持元件和同一封盖元件。
保持元件例如可以发挥预夹紧作用,其用于将抓持元件保持在抓持定位中,并且仅当进行(再次的)压力作用时才移至打开定位。
在一个实施方案中,抓持元件包括接合元件用于在将盖施装到容器上期间将扭矩传递到盖上。
为了将盖拧紧到容器上而转动封盖元件可以有效地转化作用到盖上的扭矩。
可以规定,调整机构构造成在封盖过程结束时使抓持元件运动到打开定位中。
利用该实施方案确保,抓持元件在封盖过程期间,也就是在将盖施装到容器上期间还保留在抓持定位中,从而盖可靠地定位在容器上。由于一旦封盖元件从盖移开,抓持元件就运动到打开定位中,这确保了,不会意外地又从容器上移开盖。
此外,调整机构还包括夹紧装置,以便通过在容纳盖时产生的压力作用将抓持元件调整到抓持定位中,并且在将被保持的盖传递到容器上时再次产生的压力作用下将抓持元件调整到打开定位中,其中,夹紧装置构造成将抓持元件保持在闭合定位中。
例如由圆珠笔等通过连续的压力作用送入不同定位的器件而已知这些夹紧装置。其通常包含引导部,元件沿引导部运行。引导部通常具有两个彼此在压力方向上错开布置的运动止点,其中,导入的元件在压力作用时交替从其中一个定位切换至另一定位中,从而借此夹紧装置可以执行将抓持元件从打开定位调整到抓持定位中,并且反之亦然。
此外,在一个实施方案中规定,封盖机包括抛出元件,抛出元件能够与封盖元件的调整机构协同工作,以便将抓持元件从抓持定位调整到打开定位中。借此,如果未能将盖施装在容器上,例如在相应封盖元件下方没有定位容器并且因而无法施装盖,也可以确保抓持元件进入打开定位中。
在该实施方案的一个改进方案中规定,通过抛出元件与调整机构的协同工作能够将抓持元件从抓持定位调整到打开定位中,而无需在将被保持的盖传递到容器上时产生压力作用。
因此,例如抛出元件可以将调整机构调整到如下定位(例如“释放定位”,其中,可以释放盖)中,即,在该定位中,抓持元件的运动被释放,从而其自动(例如结合弹簧元件)调整到打开定位中。
此外,调整机构可以包括夹紧装置,并且抛出元件构造成将夹紧装置的一部分从使抓持元件保持在抓持定位中的定位调整到使抓持元件转换到打开定位中的定位中。
在调整机构借助夹紧装置来实现的情况下,夹紧装置的包含夹紧装置的引导部的那部分例如可以运动,以便在受引导的元件的运动中释放受引导的元件,从而抓持元件可以转换到打开定位中。
在另一实施方案中,弹簧元件将抓持元件夹紧到抓持定位中。
这样可以确保,在缺少盖或相应压力作用情况下,抓持元件通常停留在打开定位中。
此外,封盖元件以能转动的方式布置在封盖机上,以便通过扭矩的作用将盖施装到容器上,其中,调整机构以随同封盖元件转动或者不随同封盖元件转动的方式布置。
在调整机构可随同转动的布置方案中,无需其旋转对称的设计,这可以简化例如与夹紧装置有关的结构。如果调整机构以不随同转动的方式布置,则可以在调整机构沿竖直方向的正确定位方面带来优点。
根据本发明的用于容器封盖,例如瓶子封盖的方法借助封盖机执行,其中,通过封盖元件的抓持元件容纳来自储存部的用于容器封盖的盖,并且然后将盖施装到容器上,其中,封盖元件包括调整机构,调整机构使抓持元件在抓持定位和打开定位之间运动,在抓持定位中,抓持元件抓持来自储存部的盖并将其保持在抓持定位中,其中,调整机构通过在容纳盖时产生的压力作用将抓持元件调整到抓持定位中,并且在将被保持的盖传递到容器上时再次产生的压力作用下将抓持元件调整到打开定位中,其中,调整机构包括保持元件,保持元件将抓持元件保持在抓持定位中。该方法允许将不同尺寸的盖灵活施装到容器上。
在一个实施方案中,在对容器进行施装期间抓持元件保留在闭合定位中,与此同时给予盖压力,并且当封盖元件从已封盖的容器移开时将抓持元件调整到打开定位中。
由此确保,只要还由封盖元件向盖(和容器)给予压力,抓持元件就停留在抓持定位中,这样确保盖的正确施装。因为随后抓持元件(在取消压力的情况下)运动到打开定位中,则确保从已封盖的容器上可靠地松开抓持元件。
也可以规定,将抓持元件从抓持定位运动到打开定位中,用以借助与封盖元件的调整机构协同工作的抛出元件来抛出盖。
该实施方案尤其是优选的,以确保在出现容器未封盖之后在容纳新的盖之前抛出盖。
在该实施方案的一个改进方案中规定,在可选地将盖传递到容器上之后操纵抛出元件。
通过沿流程方向布置在将盖施装到容器上的区域之后的抛出元件,例如可以在每次进程中实现抛出元件的标准化操纵,以确保针对容器未封盖的情况仍然抛出已容纳的盖。
在另一实施方案中,通过弹簧元件将抓持元件预夹紧到抓持定位中。如果抓持元件预夹紧到打开定位中,则确保,正确接合盖且实现可靠地从已封盖的容器上松开。
此外,在将盖施装到容器上期间,使封盖元件转动,其中,使调整机构随同转动或使调整机构不随同转动。借此可以实现在封盖元件的结构和随动方面的不同优点。
附图说明
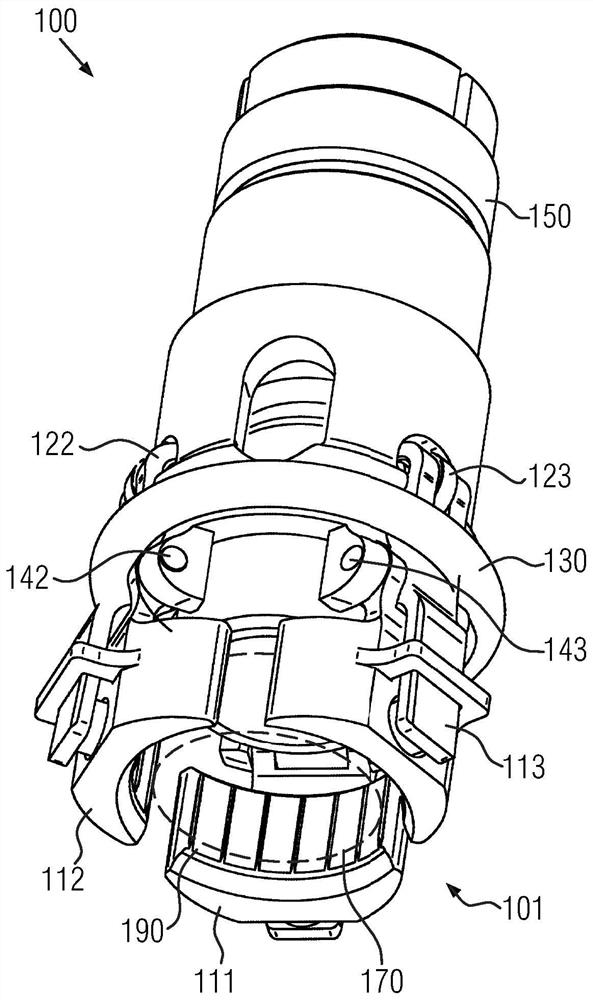
图1示出根据一个实施方案的封盖机的封盖元件;
图2a和图2b示出根据其中一个实施方案的封盖元件及其组成部分;
图3a至图3d示意性示出在接收盖和将其传递至容器上时封盖元件上的运动过程;
图4a至图4c示出在抛出盖时的过程;
图5示意性示出封盖机的一个实施方案。
具体实施方案
图1示出封盖元件100,其例如可以是根据本发明的封盖机的部件。封盖机在图5中示意性示出。
封盖元件100例如可以随同转动地布置在封盖机上并且移向不同定位。封盖元件100原则上包含未进一步限定的本体150(也称为壳体),其例如可与封盖机建立连接。在本体上设置抓持元件101。在此处所示实施方案中,抓持元件101包含多个夹钳(也称为钳口)或卡夹元件111至113。它们如下布置,即,在它们之间可以容纳盖并且可由钳口111至113围握和保持盖。为此例如可以规定,在其内可容纳盖170的钳口111至113的内部区域之内布置一个或多个接合元件190,当抓持元件尤其是钳口111至113抓持盖时,接合元件可以与盖的上表面至少部分接合。接合元件190可以构造为,在盖和夹钳111至113之间建立形状锁合和/或力锁合的接触。通过这些接触,在封盖元件100转动以将盖安装在容器上时,可以通过抓持元件(或钳口111至113)将扭矩传递至盖,并且避免盖相对于封盖元件转动。借此实现可靠地将盖安装在容器上。
在此处所示实施方案中,抓持元件的钳口111至113示出为(贴合接触情况下)围握盖170。这理解为抓持元件101的抓持定位。抓持元件101和尤其是钳口111至113然而以可运动的方式受支承,从而它们例如以能围绕钳口112和113的属于它们的转动轴142和143转动的方式受支承。为此可以如以下还阐述的那样例如设置引导滚子122和123,它们沿着例如布置在封盖元件100的主体150内的调整机构延伸,其中,调整机构如下实现滚子122和123的运动,即,实现钳口112和113围绕转动轴142和143转动。如果钳口已打开,从而它们通常不执行抓持的功能,则其被称为“打开定位”。
附加还可以设置弹簧元件,例如环圈130,其构造为,使得抓持元件要么预夹紧到打开定位中要么预夹紧到抓持定位中。优选是预夹紧到打开定位中,因为这样可以避免由于无意地设定到抓持定位中而使得待抓持的盖未按规定被抓持,或者避免施装盖之后无法从已封盖的容器上松开封盖元件。
在此处所示实施方案中,弹簧元件130是O形环,其从外部围握各个钳口111至113,然而该实施方案是非强制性的。针对每个或至少其中一个钳口111至113也可以设置其他弹簧元件,例如独立的夹紧弹簧。
在此处所示实施方案中,至少钳口112和113可围绕相应轴142和143运动。在该实施方案中这也可以适用于钳口111,其围绕此处未示出的轴以此处同样未示出的滚子以可运动的方式支承在还有待说明的调整机构上。备选地然而也可以规定,仅其中一个钳口以可围绕相应轴运动的方式受支承。
此处所示的抓持元件具有三个钳口的实施方案不是强制性的。也可以仅设置两个钳口或超过三个的钳口。代替钳口也可以设置其他元件,如卡夹元件,它们仅点状接触容器。在本发明中不受限制,从而一般性地在以下说明中“抓持元件”101代表,可以在抓持的和打开定位之间运动,以便实现抓持盖或松开盖。在应用钳口情况下示例性说明的实施方案也能够例如在应用卡夹元件情况下以所有其他形式实现。
图2a和图2b以侧视图(穿过封盖元件的虚拟纵轴线或中线延伸)和放大细节图示出如图1所示封盖元件100的实施方案。
在此处所示实施方案中,作为弹簧元件再次设置环绕的O形环作为橡胶环130。其也可由聚氨酯或其他材料制成和/或包含其他元件,它们可以实现夹紧或弹动作用。不同于图1的实施方案,为了简化示出在此仅示出其中一个钳口,作为以可围绕轴142转动的方式受支承的钳口112。理解为,在此也可以针对抓持元件规定所有迄今为止所述和可想到的其他实施方案,只要可以实现以下所述的功能(完全或部分)。
如涉及图1所述,封盖元件包括调整机构。调整机构由各个元件261、262、263和264构成并且承担促使抓持元件在抓持定位和打开定位之间运动的任务。
在此,在此处所示实施方案中可以设置“滑块”261。该滑块可以与盖(为此参见例如图3a至3d的说明)贴合接触并且通过盖的压力作用沿所示双箭头方向运动或至少朝向元件262方向运动。
在此,滑块261例如可以借助连接件264的帮助以可相对于封盖元件主体150运动的方式受支承。该连接件例如可以构成为杆件,其以可运动(例如穿过元件262)的方式受支承。此外,可以给滑块261或任意其他适当的机构配属有可与元件262如下协同工作的元件263,即,在滑块261与盖接触和盖被抓持元件101包围情况下,实施抓持元件从打开定位至抓持定位的运动。同时本发明规定,元件262和263如下协同工作,即,它们共同实现保持元件,使得只要盖布置在抓持元件101中(尤其是即使没有进一步或持续的压力作用),抓持元件就保持在该定位也就是抓持定位中。
此外规定,元件262和263如下协同工作,即,当再次向调整机构给予压力时,例如在将盖安装在容器上时,抓持元件101可以又转换到打开定位中。在此尤其可以规定,首先释放保持元件,并且在抓持定位中松开通过保持元件实现的抓持元件的保持,从而抓持元件又可运动至打开定位。然而不必实施直接移至打开定位中,如以下所述。
在此仅关于元件262和263的功能完全抽象地描述元件262和263,与此同时,图2b中说明详细实现方案。在此处所示实施方案中,元件263和元件262共同构成“夹紧装置”,如圆珠笔那样已知。夹紧装置通常具有通过给予压力交替地在两个定位之间切换的特性。
在此处所示实施方案中,元件262出于此目的包括引导部266,例如作为可引导的棒可以与元件264连接的元件263可以根据所示箭头方向在引导部266中运动。为实现此目的,可以在引导部266之内布置止挡265,从而元件263只能根据箭头所示路径上移动。
如果没有盖布置在抓持元件101内,则滑块261位于图2a下方所示抓持元件101边缘附近并且相应地元件263位于引导部266的下端部处的所示定位268中。如果盖插入到抓持元件101中,则元件263通过元件264的向上运动而沿引导部266运动并且最终运动到定位263‘中。元件263固定在该定位中并且滑块261也相应固定在该定位中,在该定位中,抓持元件101强制进入图2a所示的闭合定位。如果现在例如通过封盖元件与容器接触而再次给予压力,则元件263从定位263‘首先运动到其中一个上方区域267(通过滑块的向上运动),如果封盖元件从盖上移开,则该元件可以从该上方区域滑至下方区域268中的原始定位中。
最后例如通过滚子122和沿锥形成形的滑块261的滑动促使元件264以及进而元件263不保留在例如其中一个区域267内,这是因为滚子122通过弹簧元件130促使由于钳口112围绕旋转轴142旋转以及进而朝向本体150运动而引起滑块261向下运动。滚子又按压滑块261使其向下并借此将抓持元件101夹紧至打开定位。然而只有当元件263未处于定位263‘中时才实施该运动,这是因为在该定位中阻止元件264的继续向下运动。在定位263‘中,夹紧装置的元件262和元件263一起构成保持元件,从而抓持元件101通过该保持元件保持在抓持定位。
因而通过设置夹紧装置和通过滑块与盖接触来操纵夹紧装置确保的是,一方面正确抓持盖,另一方面在容器封盖之后又释放盖。借助控制凸轮帮助的可能的机械控制在此不是必须的,这是因为抓持元件的操纵通过自身与盖相互作用实施。
图2a和图2b中以及涉及图1给出的封盖元件工作原理一般性说明现在应当在图3a至图3d中再次阐述。
图3a示出一种状态,其中,封盖元件100定位在盖370之上,以便将其例如从此处未进一步示出的盖储存部取出。这通常是必要的,这是因为盖无法事先保存在封盖元件100自身内,而是必须以任意方式供给封盖元件100,以便随后从其上传递到容器上。为此“自填充”的储存部是有利的,其中保存大量的通过封盖元件自动推入适当的接收定位的盖。盖370的储存部的实施然而是非局限性且在此也不会更详细的描述,这是因为它们根据现有技术已足够已知。
在图3a所示的定位中,抓持元件101和此处尤其是钳口112(其例如是抓持元件101的自身可运动的元件)预夹紧到打开定位中。这在该实施方案中如下实现,即,滑块264位于其邻近盖370或抓持元件101的下部容纳端部的定位中并且基于椎体结构借助弹簧元件130将滚子122压靠滑块264的更靠内的表面,这样实施钳口112围绕轴142的转动,从而实施抓持元件预夹紧至打开定位。
此外示出元件263在此位于如下定位中,在该定位中,其(与图2b相比)在引导部内定位在最下方点268。
如所示,封盖元件朝向盖370的方向运动,封盖元件在图3b中到达盖。
因为抓持元件101在打开定位预夹紧,所以盖370可以压入抓持元件。通过封盖元件的持续向下运动,盖370给予滑块264压力或者说通常给予调整机构压力,调整机构用于将抓持元件从打开定位转至抓持定位。
这在此处示出的实施方案如下实现,即,向上按压滑块264,基于圆锥体结构导致滚子122在其表面处被向外按压,从而抓持元件的钳口112围绕轴142沿所示箭头方向转动并且钳口112在朝向抓持元件的中心的方向上运动并与盖370物理接触。只要滚子围绕轴142转动,就设置有抵抗弹簧元件130的预夹紧至打开定位的作用。
基于滑块264的运动,在调整机构实施为夹紧装置的情况下元件263同时也向上运动,从而其最终停在定位263‘中(参见图2b)。在该定位中,抓持元件位于抓持定位中,如其在图3b中达到的那样。因为在不向滑块给予其他压力的情况下元件263无法自动实现从定位263‘运动出来,所以封盖元件现在可以被抬起并且将在抓持元件101的抓持定位中可靠抓持的盖从储存部取出。
然后抓持的盖施装到容器380(参见图3c)上。这通常通过给予明显的压力以及必要时给予转动运动实现,该转动运动例如可以通过整个封盖元件100执行。如果盖压向容器380,首先滑块264略微抬起,这导致,元件263从其定位263‘到达其中一个定位267中(参见图2b)。因为在施装到容器380上期间的持久不变的压力(或大致不变的压力,至少朝向容器方向的压力)被给予到盖上,所以尽管元件263定位不固定,抓持元件仍然保留在抓持定位中。仅当如图3c所示,执行封盖元件100的向上运动(通常仅在封盖过程结束或完成之后),滑块才向下运动并且元件263又移至在引导部266下端部的其初始定位中。与此同时,滚子122又沿滑块264的锥体表面运动,从而基于在滑块264向下运动时该区域渐细,弹簧元件130的弹簧力可以促使抓持元件或者说夹钳112围绕轴142转动,并且促使抓持元件运动至打开定位。由此可以立即开始将封盖元件从现在已封盖的容器上升起。
该过程在图3d中已完整结束,其中,出现图3a所述的状况,在此状况下,抓持元件在打开定位预夹紧。因而封盖结束,抓持元件现在可以再次容纳盖。
在所述过程中然而可能出现混乱情况。很有可能容器掉落,那么封盖元件在某种意义上“抓空”,由其抓持的盖没有转移至容器上并因而封盖元件原则上将留在抓持定位。
在这种情况下,在为了容纳新的盖随后运动至储存部时一个盖已经在封盖元件中抓持,从而新的盖无法被容纳,这可能导致功能故障。
为了避免这种情况,图4a至图4c示出另一实施方案,其中还替代迄今所述部件地设置抛出元件495,其构造为可与调整机构协同工作,使得抓持元件也能够无需与容器相互作用而移至打开定位并因而可以随同将当前还被抓持的盖抛出。不同于迄今所述的方法(其中,控制抓持元件从打开定位运动进入抓持定位并且最后通过向滑块或者说通常是调整机构给予压力而从抓持定位再次运动进入打开定位),所述有针对性地抛出盖现在通过有针对性控制或操纵调整机构实施,而无需(如所述通过盖)向调整机构给予相应压力。
为了简化示出,在此假设,调整机构再次一般性地被构造为夹紧装置,如其已在图2中示出然而还示例性地在图3a至图3d中说明的那样。其他实施方案在此也可以想到并且相应匹配抛出元件495。
图4a所示的实施方案现在规定,夹紧装置的元件262或者说引导部262(其在该实施方案中实现调整机构)包括朝向滑块264方向或朝向抓持元件101方向渐细的区域496。渐细在此例如可以描述为,材料的一部分,即元件262的向下指向的部分与元件262的上方区域内的部分相比更多地向封盖元件100的本体150的中央方向延伸。
抛出元件495优选可朝向抓持区域101方向运动并且布置在元件262的上方,从而其可插入元件262。元件262在该实施方案中以可运动的方式受支承,从而其可沿所示箭头方向(水平或至少优选垂直于元件263的运动平面)运动。
如果现在抛出元件495沿锥体区域496朝向抓持元件101方向引导,则基于抛出元件495在水平平面中的固定定位(其仅可沿竖直方向朝向抓持区域运动和从其中运动离开),元件262沿所示箭头方向向外运动且运动离开元件263。
由于元件263在其竖直运动中与图2b相比是自由且完全从引导部(其最终被设计成凹部)上滑落的,从而元件在重力影响下连同滑块264一起对应于图4b所示的状态向下(即,朝向抓持元件方向)滑落。备选地,元件263可以连同滑块264一起也主动借助弹簧力或类似的力向下运动。元件位于下方点268的高度上(参见图2b)。在所述运动期间,盖370现在从运动到打开定位的抓持元件101中松脱,这是因为其不再被例如抓持元件的钳口抓持。这在图4b中借助滑落的盖370示出。
在图4c中,现在抛出元件495又进入其原始定位。通过设置也许附加地预夹紧元件262的弹簧元件(预夹紧在此朝向元件263方向实施,从而元件263保持在引导部266内)可以促使现在元件262运动进入其原始的图4a规定的初始状态。元件263位于下方定位268。同时,滑块定位在图4c所示定位中,如其涉及图3a定位一样,之后其容纳盖,并且抓持元件101在打开定位预夹紧。那么现在可以容纳新的盖,再次开始图3所述的方法。
原则上可以规定,根据图4的流程在利用封盖元件执行的每个封盖过程之后实施。这样可以确保盖绝对不会留在抓持元件内并且抓持元件始终可以容纳新的盖。
为实现此目的,抛出元件的操纵例如可以机械地通过控制凸轮和配属于抛出元件且沿控制凸轮运转(此处未示出)的控制滚子实现,其始终在封盖过程结束之后在相同定位(例如在封盖元件沿着被设计成回转机的封盖机的相同角度位置)中操纵抛出元件,之后再次使用封盖元件进行容纳。
备选地也可以规定,封盖过程之后或封盖过程同时已经确定,是否存在故障,例如是否已给相应封盖元件配属如下容器,在该容器上可以施装盖。这例如可以借助传感器执行,它们例如借助光栅的帮助确定,容器是否定位在相应的配属于封盖元件的容器容纳部内。备选地例如也可以应用传感器,以便探测到在封盖过程中盖从封盖元件上脱落。
如果如下确定了功能故障,即,在实际计划的封盖过程之后仍有盖在封盖元件内,则例如可以通过由计算机适当控制来操纵可选配属给抛出元件495的执行器或操纵抛出元件495的其他元件,以便有针对性地操纵封盖元件的抛出元件并且确保抛出意外留下的盖。
图5示出根据本发明一个实施方案的封盖机500的示意图。封盖机500在此被设计成回转机,其包括转机,沿其周围布置一行封盖元件100。给封盖元件配属有容器容纳部,例如立式盘或转盘520,从而容器530可以夹在封盖元件和容器容纳部520之间,用以根据其中一个上述实施方案借助封盖元件以盖进行容器封盖。
在此处所示实施方案中,回转机被设计成以可围绕转动轴R转动的方式受支承。沿容器输送方向(也就是沿旋转方向)可以在上游设置输送器件用于将容器输送至封盖机并且在下游设置送出器件用于从封盖机送出容器。它们例如可以实现为旋转星或其他器件。
替代此处所示的作为回转机的实施方案,也可以设置直线工作的机器。在该直线工作的机器中,一行封盖元件依次布置,其中,它们例如对应于封盖元件的数量时钟输送容器,以便同时进行容器封盖。
其他常见的封盖机实施方案在此是可以想到。
因为所述封盖元件无需附加的或备选的外部控制机构(控制凸轮或伺服驱动器等),所以常见且已使用的封盖机也可以装备本发明封盖元件,以利用本发明优点。
附加例如可以提供抛出容器,在其中,借助抛出元件的帮助分拣例如未正确封盖时得到的待抛出的盖,并且阻止其任意分布在机器中并导致功能故障。
- 分配封盖、具有分配封盖的容器以及用于制造分配封盖的方法
- 用于容器封盖的封盖机