乘客输送机的链条松弛检测装置
文献发布时间:2023-06-19 11:13:06
技术领域
本发明的实施方式涉及一种乘客输送机的链条松弛检测装置。
背景技术
以往,在乘客输送机中,多个梯级由梯级链条连结为环状。然后,通过经由链轮、驱动链条以及减速器连结的马达的驱动,梯级链条被驱动,梯级进行环绕(循环)移动。此外,移动扶手由扶手带驱动链条驱动。这些链条由于长年的使用而产生伸长。如此,若链条产生伸长(松弛),则链条与链轮的啮合变差。
专利文献1:日本特开2010-149970号公报
因此,需要进行维护、检修作业,确认链条是否产生松弛。链条是否产生松弛的确认如下进行:作业者确认将链条压入或者拉动时的变形量,并判断该变形量是否异常。因此,链条是否产生松弛的判断根据作业者的不同而有可能产生差别。
发明内容
本实施方式的目的在于提供能够正确地检测链条的松弛的乘客输送机的链条松弛检测装置。
实施方式的乘客输送机的链条松弛检测装置具备:驱动定时检测部,分别检测卷挂有链条的一对链轮实际开始旋转的定时即动作定时;以及控制部,在由上述驱动定时检测部检测到的一对动作定时之差超过规定的基准定时差并被检测到的情况下,判断为产生了规定的基准值以上的链条的松弛。
附图说明
图1是表示应用了实施方式的链条松弛检测装置的自动扶梯的概略构成例的图。
图2是自动扶梯的控制系统的概要构成框图。
图3是实施方式的链条松弛检测装置的主要部分说明图。
图4是实施方式的松弛检测原理的说明图。
图5是实施方式的动作流程图。
符号的说明
10…检测装置,11…第一回转式编码器(第一驱动定时检测部),11A…促动器部,12…第二回转式编码器(第二驱动定时检测部),13…控制部,14…警报单元,100…自动扶梯(乘客输送机),105…马达,106…减速器,111…链轮(驱动链轮),112…驱动链条,113…驱动轮(从动链轮),114…从动轮,115…梯级链条,120…梯级,200…控制盘,201…控制部,202…控制用存储部,203…通信部,300…远程监视装置,301…控制部,302…报告部,302…监视用存储部,303…通信部,304…警报单元。
具体实施方式
以下,参照附图对本发明进行详细说明。此外,下述的实施方式为例示,发明的范围不限定于此。此外,下述的实施方式的构成要素包含本领域技术人员能够容易地设想到或者实质相同的要素。
图1是表示应用了实施方式的链条松弛检测装置的自动扶梯的概略构成例的图。
在本实施方式中,作为使连结为环状的多个梯级环绕(循环)移动而进行动作的乘客输送机,将自动扶梯100作为一个例子来进行说明。
如图1所示那样,实施方式的自动扶梯的链条松弛检测装置(以下简称为链条松弛检测装置)10设置于自动扶梯100。自动扶梯100设置于建造物(也称为建筑物),在该建造物的一层(以下称为下层)与比该下层靠上方的另一层(以下称为上层)之间传送乘客等。
自动扶梯100具备桁架(构造框架)110、多个梯级120、以及栏杆130。在桁架110的内部配设有框架(图示省略)、自动扶梯100的驱动机构。
自动扶梯100的驱动机构具备作为驱动源的马达105、减速器106、驱动链条(链条)112、驱动轮(链轮)113、从动轮(链轮)114、以及梯级链条(链条)115。
马达105设置在自动扶梯100的上层侧。在马达105的输出轴安装有减速器106。
驱动链条112形成为环状,架设在减速器106的链轮111与驱动轮113之间。驱动链条112通过经由减速器106传递来的马达105的驱动力而围绕驱动轮113和减速器106的链轮111进行循环行驶,由此使驱动轮113旋转。即,驱动链条112将经由减速器106传递来的马达105的驱动力向驱动轮113传递。
自动扶梯100是通过使驱动轮113驱动、从而使卷挂在驱动轮113与从动轮114之间的梯级链条115驱动、使连结为环状的多个梯级120环绕移动而进行动作的。
在自动扶梯100向下降方向运转的情况下,在上方的乘入口(上层侧乘降口101),多个梯级120之中朝向行进方向而邻接的梯级120彼此以水平状从桁架110内出来。然后,在上部过渡转弯部,相邻接的梯级120间的高低差扩大,多个梯级120转变为台阶状。然后,在中间倾倒部,多个梯级120成为台阶状而下降。
然后,在下部过渡转弯部,相邻接的梯级120间的高低差缩小,多个梯级120转变为水平状。然后,在下方的下梯口(下层侧乘降口102),多个梯级120再次成为水平状而向桁架110内进入。然后,多个梯级120在进入桁架110内之后向上方反转,在回路侧以水平状上升。然后,多个梯级120再次反转,在上层侧乘降口101从桁架110内出来。
在自动扶梯100向上升方向运转的情况下,成为与上述相反的动作。
如此,在上层侧乘降口101、下层侧乘降口102,梯级120使供利用者搭乘的上表面的踩踏面成为水平状,从桁架110内出来或者向桁架110内进入。
自动扶梯100在多个梯级120的行进方向的两侧具备一对栏杆130。栏杆130主要包括裙式护板(图示省略)、内底板131、玻璃132以及扶手带133。
裙式护板在与多个梯级120的行驶方向(自动扶梯100运转的下降方向以及上升方向)正交的方向(宽度方向)的两侧接近地、且遍及上层侧乘降口101与下层侧乘降口102之间而设置。
在裙式护板的上侧安装有内底板131。在内底板131的上侧安装有玻璃132。在玻璃132的外周所安装的扶手轨道(图示省略)中,能够移动地嵌入有扶手带133。自动扶梯100构成为,与多个梯级120的行进以及行进方向相配合,栏杆130的扶手带133通过扶手带驱动链条(图示省略)而进行环绕移动。
如此,在自动扶梯100中使用有驱动链条112、梯级链条115、以及未图示的扶手带驱动链条这3个链条。驱动链条112、梯级链条115、扶手带驱动链条分别设置有如下基准:在使中央部挠曲了时,如果摆动幅度(变形量)为基准值Xmm(例如,数十mm)以下则判断为正常。
换言之,若摆动幅度变得大于Xmm,则驱动链条112、梯级链条115、扶手带驱动链条产生松弛,判断为异常。
而且,如此,在链条产生了松弛的情况下,卷挂有该链条的链轮的旋转开始定时产生偏差。
例如,在驱动链条112的情况下,在作为驱动链轮起作用的链轮111、以及作为从动链轮起作用的驱动轮113从停止状态转变为动作状态(旋转状态)的阶段,从作为驱动链轮的链轮111的旋转开始定时到作为从动链轮的驱动轮113的旋转开始定时,根据驱动链条的松弛而产生偏差。
因此,若该旋转开始定时的偏差成为规定的基准时间以上,则能够判断为对应的链条产生规定的基准量以上的松弛。
以下,在本实施方式中,以检测驱动链条112的松弛的情况为例进行说明。
通过由设置在桁架110内的控制盘(控制装置)200对减速器106、马达105进行控制,由此实现这样的自动扶梯100的动作。
控制盘200是物理地具有CPU、RAM、ROM等的计算机。控制盘200的功能通过如下方式来实现:将ROM所保存的应用程序装载到RAM而由CPU执行,由此在CPU的控制下使自动扶梯100内的各种装置动作,进行RAM、ROM中的数据的读出、写入。
图2是自动扶梯的控制系统的概要构成框图。
如图2所示那样,自动扶梯100的控制盘200与链条松弛检测装置10以及设置在自动扶梯100的远程地的远程监视装置300相互能够通信地连接,对检测信号、驱动信号、控制信号进行收发。
控制盘200通过对梯级120的移动开始、移动停止、移动速度等进行控制,由此对自动扶梯100进行驱动控制。
控制盘200具有控制部201、控制用存储部202、以及通信部203。在此,控制盘200能够基于经由通信部203输入的、来自远程监视装置300的指示,进行自动扶梯100的驱动控制。即,自动扶梯100能够由远程监视装置300进行远程操作。
控制部201进行在从链条松弛检测装置10的控制部13接收到第一回转式编码器11以及第二回转式编码器12的距离检测状态、即与链条松弛相关的检测信号的情况下使控制用存储部202存储与链条松弛相关的检测的履历信息的控制。此外,控制部201进行在接收到检测信号的情况下向远程监视装置300发送与链条松弛相关的检测状态的通知数据的控制。
控制用存储部202为存储装置,存储从控制部201接收到的与链条松弛相关的检测信号的距离检测状态以及控制部13的控制状态信息等。具体地说,控制用存储部202将动作时刻、第一回转式编码器11以及第二回转式编码器12的距离检测状态、对第一回转式编码器11以及第二回转式编码器12进行识别的识别信息等,作为第一回转式编码器11以及第二回转式编码器12的动作履历信息来存储。此外,控制用存储部202将控制部13的控制时刻、控制状态(也包括各种动作检测状态)作为控制履历信息来存储。
通信部203对在其与远程监视装置300之间进行的通信进行控制。
远程监视装置300例如设置在从自动扶梯100远离的远程监视中心。
远程监视装置300经由通信部303而与控制盘200相互能够通信地连接,对与控制盘200中的检测信号对应的检测数据、控制履历数据、用于对控制盘200进而对自动扶梯100进行控制的控制数据进行收发。
远程监视装置300供监视者通过远程监视盘(图示省略)对自动扶梯100的各部分进行远程监视。如图2所示那样,远程监视装置300具有控制部301、监视用存储部302、通信部303、以及警报单元304。
控制部301进行基于从控制盘200接收的与第一回转式编码器11以及第二回转式编码器12的距离检测状态相关的控制信号使警报单元304报告驱动链条112产生了松弛的控制,或者进行使监视用存储部302存储第一回转式编码器11以及第二回转式编码器12的检测履历信息的控制。
监视用存储部302是存储装置,将从控制部301接收到的第一回转式编码器11以及第二回转式编码器12的距离检测状态,作为第一回转式编码器11以及第二回转式编码器12的检测履历信息来存储。此外,监视用存储部302按照监视者分别将包含电话号码、FAX号码、电子邮件地址的联系方式作为监视者联系方式信息来存储。
通信部303对在其与控制盘200之间进行的通信进行控制。
警报单元304例如由包括扬声器、警报器、警报灯、电话、FAX、电子邮件在内的通信设备等构成。警报单元304用于对监视者报告驱动链条112产生了松弛的情况。警报单元304基于来自控制部301的控制信号,例如,从扬声器、警报器输出声音,或者使警报灯点亮,或者经由通信设备基于预先存储的监视者联系方式信息进行报告。
如图1所示,本实施方式的链条松弛检测装置10对自动扶梯100的链条、具体地说是驱动链条112的松弛进行检测。
链条松弛检测装置10大体上具备第一回转式编码器11、第二回转式编码器12、控制部13、以及警报单元14。
在上述构成中,在自动扶梯100进行动作的情况下,第一回转式编码器11对链轮111的旋转状态进行检测。
在自动扶梯100进行动作的情况下,第二回转式编码器12对驱动轮113的旋转状态进行检测。
控制部13构成为所谓的微型计算机,根据控制程序,基于第一回转式编码器11以及第二回转式编码器12的旋转检测状态,对驱动链条112是否产生了规定基准值以上的松弛进行检测,并将检测状态通知给控制盘200的控制部201,并且,在驱动链条112产生了规定基准值以上的松弛的情况下,对警报单元14进行控制而进行警报输出。
警报单元14在控制部13的控制下,在驱动链条112产生了规定基准值以上的松弛的情况下,进行警报处理。
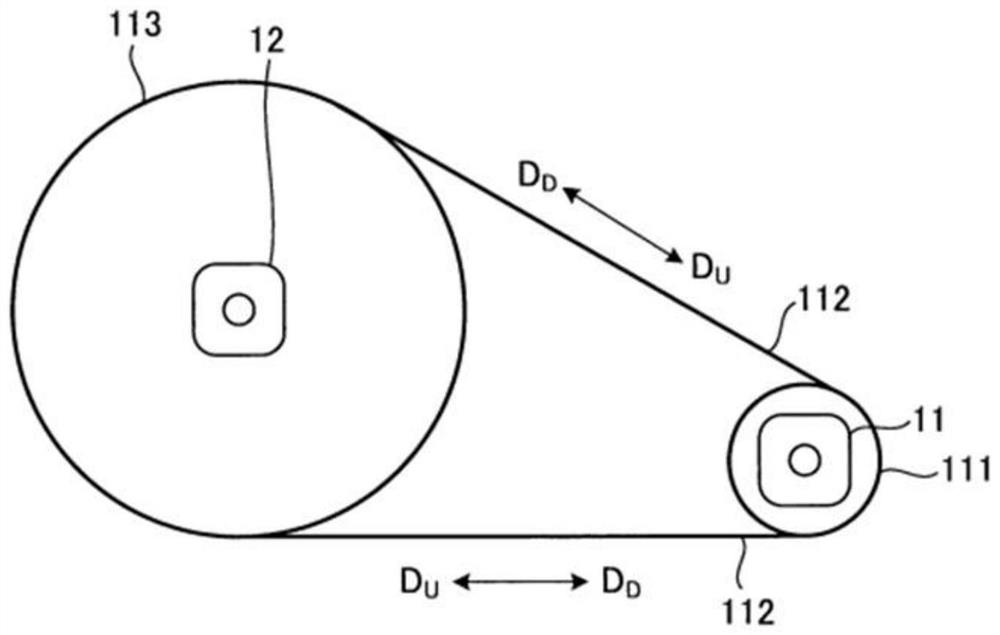
图3是实施方式的链条松弛检测装置的主要部分说明图。
如图3所示那样,实施方式的链条松弛检测装置10具备第一回转式编码器11和第二回转式编码器12。在图3中,箭头VRT为铅垂方向(以下,同样)。
在该情况下,第一回转式编码器11被设置为对作为驱动链轮的链轮111的旋转进行检测,第二回转式编码器12被设置为对作为从动链轮的驱动轮113的旋转进行检测,并分别经由未图示的固定夹具来固定。
在上述构成中,第一回转式编码器11随着链轮111的旋转而输出与旋转状态对应的脉冲数的第一脉冲信号SG1(参照图4)。
另一方面,第二回转式编码器12随着驱动轮113的旋转而输出与旋转状态对应的脉冲数的第二脉冲信号SG2(参照图4)。
然后,在链轮111以及驱动轮113从停止状态转变到旋转状态的情况下,第一回转式编码器11以及第二回转式编码器12随着旋转的开始而分别开始脉冲信号(第一脉冲信号SG1、第二脉冲信号SG2)的输出。
由此,控制部13在第一脉冲信号SG1的脉冲的输出开始定时与第二脉冲信号SG2的脉冲的输出开始定时之间的偏差成为规定基准时间以上的情况下,能够检测为卷挂在链轮111与驱动轮113之间的驱动链条112产生了规定的基准量以上的松弛的情况。
警报单元14在控制部13的控制下,在驱动链条112产生了规定基准值以上的松弛的情况下,进行警报处理。
接着,对实施方式的松弛检测原理进行说明。
图4是实施方式的松弛检测原理的说明图。
当自动扶梯100起动、马达105启动时,通过马达105的驱动力,驱动链条112开始围绕驱动轮113、减速器106的链轮111循环行驶。
此时,马达105的驱动力经由减速器106传递到链轮111,因此链轮111比驱动轮113先开始旋转。
其结果,如图4所示那样,第一回转式编码器11输出的脉冲信号即第一脉冲信号SG1的最初的脉冲,在时刻t1输出到控制部13。
进一步,随着链轮111的旋转,马达105的驱动力经由驱动链条112传递到驱动轮113。
其结果,在卷挂在链轮111与驱动轮113之间的驱动链条的松弛被吸收的时刻,驱动轮113也开始旋转。
然后,如图4所示那样,第二回转式编码器12输出的脉冲信号即第二脉冲信号SG2的最初的脉冲,在时刻t2输出到控制部13。
结果,控制部13将第一脉冲信号SG1的脉冲的输出开始定时即时刻t1与第二脉冲信号SG2的脉冲的输出开始定时即时刻t2之间的时间差Δθ作为相位差而计算、检测。
然而,如上所述,在第一脉冲信号SG1的脉冲的输出开始定时与第二脉冲信号SG2的脉冲的输出开始定时之间的偏差成为规定基准时间以上的情况下,控制部13判断为卷挂在链轮111与驱动轮113之间的驱动链条112产生了规定的基准量以上的松弛,因此比较与规定基准时间相当的时间差Δθr与时间差Δθ。
在图4的例子的情况下,由于时间差Δθ<时间差Δθr,因此控制部13判断为卷挂在链轮111与驱动轮113之间的驱动链条112未产生规定的基准量以上的松弛。
与此相对,在时间差Δθ≧时间差Δθr的情况下,控制部13判断为卷挂在链轮111与驱动轮113之间的驱动链条112产生了规定的基准量以上的松弛。
如以上说明的那样,根据本实施方式,仅通过对卷挂有链条的一对链轮的旋转开始定时的偏差进行检测,就能够容易地检测到链条产生了松弛的情况。
接着,对实施方式的动作进行说明。
图5是实施方式的动作流程图。
在以下的说明中,以图3的第一实施方式的链条松弛检测装置10为例进行说明。此外,在驱动链条的动作中,相对于作为驱动轮起作用的链轮111,驱动轮113作为从动轮起作用。
在该状态下,向自动扶梯100供给电源。
首先,控制盘200的控制部201对键开关是否处于接通进行检测(步骤S11),在键开关尚为关断状态的情况下(步骤S11;否),成为待机状态。
在步骤S11的判断中,在键开关成为接通状态的情况下(步骤S11;是),使自动扶梯进行驱动(步骤S12)。
接着,链条松弛检测装置10的控制部13进行第一回转式编码器11的旋转脉冲检测(步骤S14),检测来自第一回转式编码器11的旋转脉冲的输出定时、即链轮111的旋转开始定时的时刻(图4中的时刻t1)。
接着,控制部13进行第二回转式编码器12的旋转脉冲检测(步骤S15),检测来自第二回转式编码器12的旋转脉冲的输出定时、即驱动轮113的旋转开始定时的时刻(图4中的时刻t2)。
然后,控制部13将第一脉冲信号SG1的脉冲的输出开始定时即时刻t1、与第二脉冲信号SG2的脉冲的输出开始定时即时刻t2之间的时间差Δθ,作为相位差而计算,并作为计算履历而存储,并且,判断相位差是否为与规定基准时间相当的相位差(时间差)Δθr以上(步骤S15)。
在步骤S15的判断中,在相位差Δθ<相位差Δθr的情况下(步骤S15;否),控制部13判断为卷挂在链轮111与驱动轮113之间的驱动链条112未产生规定的基准量以上的松弛,使处理再次转移到步骤S12,之后反复进行同样的处理。
此外,在步骤S15的判断中,在时间差Δθ≧时间差Δθr的情况下,控制部13判断为卷挂在链轮111与驱动轮113之间的驱动链条112产生了规定的基准量以上的松弛,对警报单元14进行控制而进行警报输出(步骤S16)。
接着,控制部13对控制盘200的控制部201进行异常通知(步骤S17),在步骤S15的处理中,对所存储的履历进行通知(步骤S18)。然后,进行自动扶梯停止处理而使处理结束(步骤S19)。
在该情况下,通过进行经由了警报单元14的警报、并且缓慢地使马达105的驱动停止,由此进行自动扶梯停止处理。
然后,由作业者或远程监视者判断为驱动链条112产生了松弛,并进行驱动链条112的修理、更换。
在以上的说明中,在自动扶梯的驱动开始时对驱动链条112的松弛进行检测,但也能够构成为,预先设定作为驱动链轮的链轮111以及作为从动链轮的驱动轮113的旋转基准位置,并持续地检测这些旋转基准位置的相位差,而同样地检测驱动链条112的松弛。
通过如此地构成,即使在由于某种理由而急剧地产生了驱动链条112的松弛的情况下,也能够同样地对应。
如以上的说明那样,根据本实施方式的乘客输送机的链条松弛检测装置10,当由于驱动链条112的松弛,而链轮111的旋转与驱动轮113的旋转之间的相位差(或者,规定旋转基准位置的检测时刻差)变得大于规定的相位差(或者时刻差)时,判断为检测到松弛,链条松弛检测装置10的警报单元进行警报处理、或者远程监视装置300的警报单元304进行报告。
进而,根据本实施方式的链条松弛检测装置10,在控制盘200的控制用存储部202以及远程监视装置300的监视用存储部302中,能够存储第一回转式编码器11或者第二回转式编码器12的检测履历信息。
如此,根据本实施方式的乘客输送机的链条松弛检测装置10,能够正确地检测并报告驱动链条112的松弛,或者能够记录第一回转式编码器11以及第二回转式编码器12的检测履历、即在驱动链条112产生的松弛的时间序列的变化。
如此,根据以上说明的实施方式的链条松弛检测装置10,能够正确地检测自动扶梯100的链条的松弛。
在上述实施方式中构成为,作为驱动定时检测部而使用第一回转式编码器11以及第二回转式编码器12,但如果通过反射型光学式传感器或者透射型光学式传感器等对旋转检测对象的链轮的旋转位置进行检测,则也能够同样地应用。
此外,在上述实施方式中,说明了对驱动链条112的松弛进行检测的情况,但链条松弛检测装置10也能够对梯级链条115、扶手带驱动链条的松弛进行检测。由此,通过链条松弛检测装置10能够正确地检测配设于自动扶梯100的各种链条的松弛。
此外,在上述实施方式中,作为连结为环状的多个梯级120以环绕移动的方式进行动作的乘客输送机的一个例子,列举自动扶梯100而进行了说明,但本实施方式不限定于自动扶梯100,也能够同样地应用于自动人行道等其他类型的乘客输送机。
上述实施方式及变形例在不脱离发明的主旨的范围内能够进行组合。
对本发明的几个实施方式进行了说明,但这些实施方式是作为例子提示的,不意图限定发明的范围。这些新的实施方式能够以其他各种方式来实施,在不脱离发明的主旨的范围内能够进行各种省略、置换及变更。这些实施方式及其变形包含于发明的范围、主旨,并且包含于权利要求书记载的发明及其等同的范围。
- 乘客输送机的链条松弛检测装置
- 乘客输送机用链条伸长检测装置以及乘客输送机